
INTELLIGENT FAULT DIAGNOSIS
USING SENSOR NETWORK
Haris M. Khalid, Rajamani Doraiswami
1
Systems Engg. Department,King Fahd University of Petroleum and Minerals, Dhahran 31261, Kingdom of Saudi Arabia
1
Department of Electrical and Computer Engineering, University of New Brunswick, Fredericton, New Brunswick, Canada
Lahouari Cheded
Systems Engg. Department, King Fahd University of Petroleum and Minerals, Dhahran 31261, Kingdom of Saudi Arabia
Keywords: Incipient faults, Holistic approach, Fault diagnosis, Model based, Integrated approach.
Abstract: An intelligent diagnostic scheme using sensor network for incipient faults is proposed using a holistic
approach which integrates model-, fuzzy logic-, neural network- based schemes. In case the system is highly
non-linear and there are enough training data available, a neural network based scheme is preferred; where
the rules relating the input and output can be derived, a Fuzzy-logic approach is chosen; and where a model
is available, a linearized model is employed. These three schemes are integrated sequentially ensuring
thereby that critical information about the presence or absence of a fault is monitored in the shortest possible
time, and the complete status regarding the fault is unfolded in time. The proposed scheme is evaluated
extensively on simulated examples and on a physical system exemplified by a benchmarked laboratory-
scale two-tank system to detect and isolate faults including sensor, actuator and leakage ones.
1 INTRODUCTION
Fault
is an undesirable factor in any process control
industry. It affects
the efficiency of system operation
and reduces economic benefit to the
industry. The
early detection and diagnosis of faults in mission
critical systems becomes highly crucial for
preventing failure of equipment, loss of productivity
and profits, management of assets, reduction of
shutdowns, condition-based monitoring, product
quality, process reliability, economy, potential
hazards, pollution, and conservation of scarce
resources. In a chemical industry, the release of
hazardous chemicals into the environment requires
quick action to limit the harmful impact of such a
release. Of much concern is the purposeful release of
chemicals in order to cause harm. Quickly detecting
and identifying an unknown threat caused by a fault
is pivotal to limiting harm and possibly saving lives.
Because of the large area covered in either a process
control industry or water distribution systems, a
single technique is not able to monitor all of the
activity in the area of concern. For this reason, a
precise pool of intelligent approaches is being
developed to create a better response plan. There
must be a way to process and clearly present an
accurate picture of the fault threat. Information
about the constraints associated with an early
detection of hazardous material in the environment
help shape the proposed methodology, and is one of
the main motivations for embedding intelligent tools
in diagnosis and decision making (
R.J. Patton, 2000).
The purpose of this paper is to present and
advance a new methodology for the intelligent
detection of incipient faults. New methods of
assimilating information from highly complex and
nonlinear physical systems with various
nonlinearities are being developed. Intelligent tools
that have the ability to adapt, such as neural
networks and fuzzy inference systems, are brought
to bear on both of these aims. Data from a
benchmarked laboratory-scale two-tank system is
used and the proposed approach evaluated.
The faults include sensor, actuator and leakage
faults, and they can be classified broadly as either
parametric faults or additive ones. An additive fault
manifests itself as an additive exogenous signal in
the measured data, while a parametric fault induces a
121
M. Khalid H., Doraiswami R. and Cheded L.
INTELLIGENT FAULT DIAGNOSIS USING SENSOR NETWORK.
DOI: 10.5220/0002165201210128
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-8111-99-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
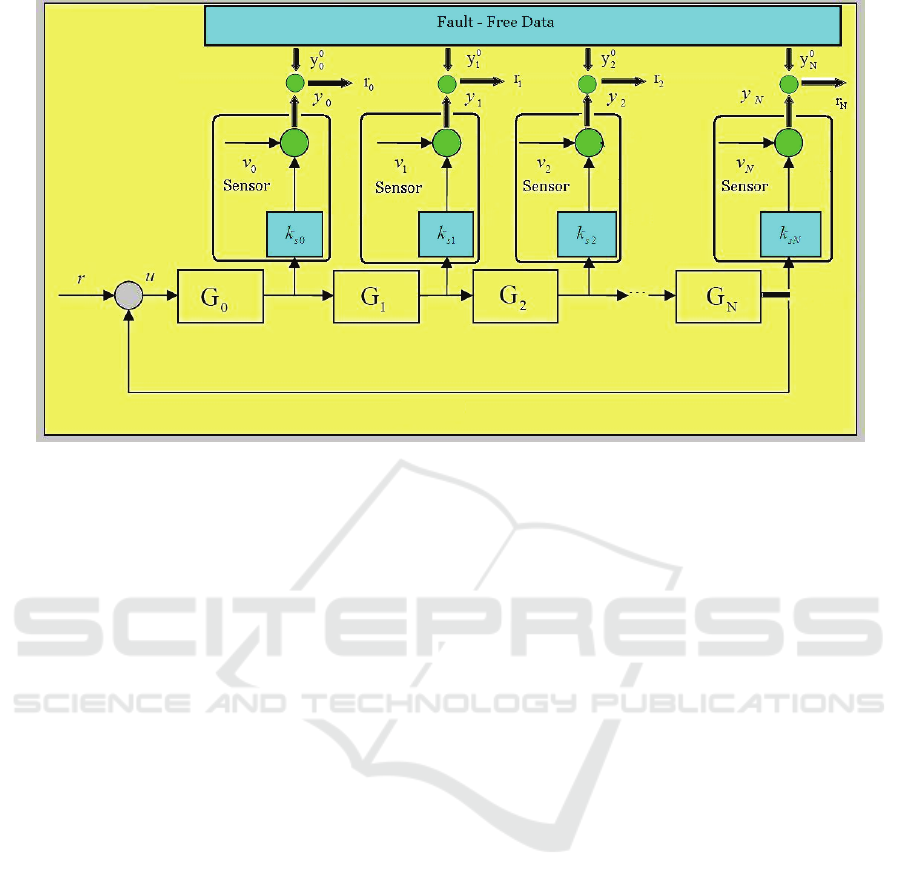
Figure 1: Sensor Network.
variation in the system parameters.
The fault diagnosis scheme can be carried out
using a neural network, or fuzzy logic or a model-
based technique
(L. B. Palma, 2003). While neutral
networks can be used to quickly and correctly
classify a particular fault, they cannot unravel it and
point out its root causes. However, these root causes
can be uncovered by supplementing the neural
network used by a fuzzy logic scheme, which
through the very makeup of its rules, will accurately
, albeit more slowly than the neural network,
pinpoint the cause(s) that spawned this fault. The
synergistic value of this integration will no doubt
provide a powerful fault detection scheme. The
neural net and fuzzy logic approaches are not geared
for the diagnosis of incipient faults, hence the need
for, and the inclusion of, a model-based scheme.
2 A SENSOR NETWORK
PARADIGM FOR FAULT
DIAGNOSIS
A new scheme is proposed here whereby a sensor
network paradigm is applied to fault diagnosis. A
typical system including a process control system, a
water distribution system formed of tanks and
network of pipes, a power utility formed of
generators and transmission lines, a communication
network, and petrochemical industries consisting of
a number of control loops, including controllers,
sensors and actuators, and various processing plants,
as shown in Fig. 1. As such, such a large system will
include a sensor network.
A sensor is modelled by a gain and an additive
noise, as given below:
0
isiii
ykyv
=
+
(1)
where
s
i
y ,
0
s
i
y
and
i
v are the measured sensor
output, true or fault-free output and additive noise,
respectively. Here the gain is such that
01
si
k≤≤,
with the degree of the fault ranging from no fault at
all for
1
si
k
=
to a complete failure for 0
si
k = . The
subsystems such as actuators, processors and
controllers are denoted by transfer functions,
i
G .
Many systems consisting of several closed loops,
each with its own reference input, can be viewed as
a sensor network that can be described by a ring-
type topology.
The objective of the sensor network is to
diagnose faults in both the sensors, through the gains
s
i
k and in the subsystems
i
G by monitoring the
sensor outputs
i
y .
The mathematical relations governing the sensor
outputs
i
y to the input to
0
G , denoted by e are:
1000s
yGkev
=
+
20111s
yGGkev
=
+
301222s
yGGGkev
=
+
.
.
012 1 (1) 1
...
iisii
yGGGGk ev
−
−−
=
+
(2)
where ery
=
− .
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
122
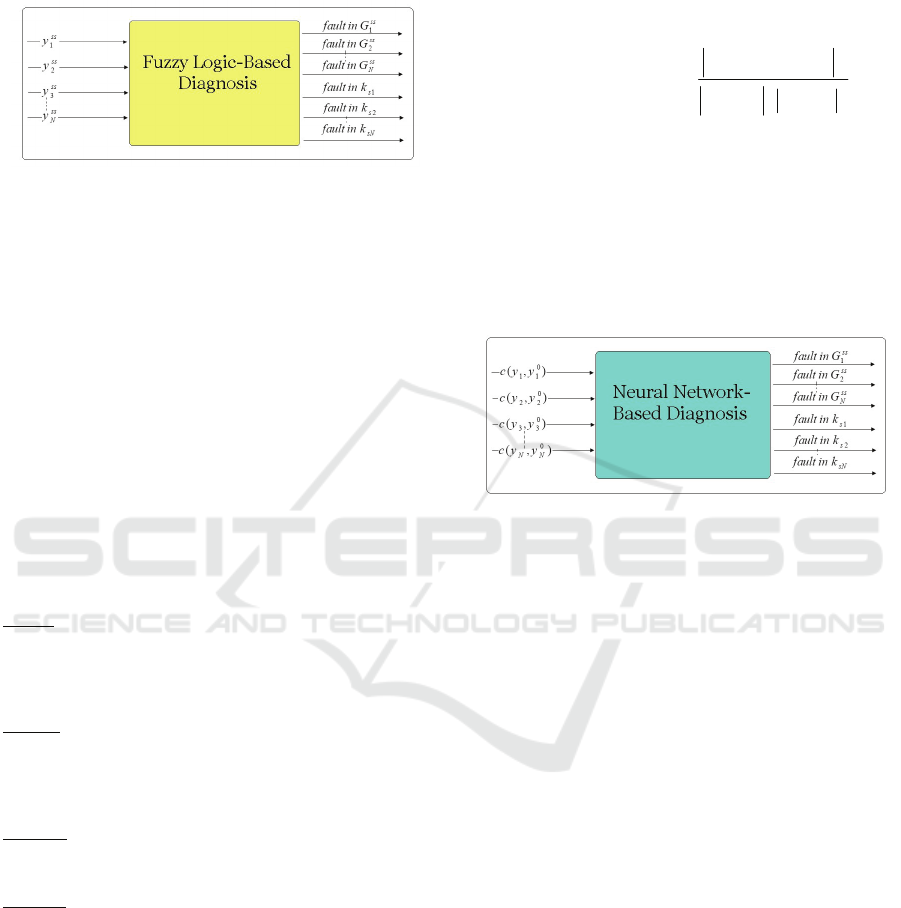
3 FUZZY LOGIC-BASED FAULT
DIAGNOSIS
Figure 2: Fuzzy Logic-Based Fault Diagnosis Scheme.
The fuzzy fault diagnosis scheme uses the steady-
state values of the sensor outputs,
i
y , denoted by
s
s
i
y
.
A change in the gain
s
i
k or a change in the steady-
state gain of the transfer function
i
G , denoted
by
s
s
i
G
, is indicative of a fault in the i-th sensor and
i-th subsystem, respectively (see Fig.2). Assuming
that the noise term is subsumed in the fuzzy
membership function, the steady-state model takes
the form:
01 2 1(1)
...
ss ss ss ss ss
iisi
y
GGG G k e
−−
=
(3)
Let us now define linguistic variables such as
zero, and non-zero. For simplicity, we will consider
the case where only one device can be faulty at any
given time, i.e. the fault is assumed to be simple. In
this case, the fuzzy rules may take the following
form:
Rule 1
: If
s
s
i
y
is non-zero, then there is a fault in the
steady-state gain
0
s
s
G or
1
s
s
G or
2
s
s
G or…or
s
s
i
G or ith
sensor gain
s
i
k
Rule II
: If
s
s
i
y
is zero, then there is no fault in the
subsystem’s steady-state gain
0
s
s
G or
1
s
s
G or
2
s
s
G or…or
s
s
i
G or ith sensor gain
s
i
k
Rule III
: If
s
s
i
y
is zero and
(1)si
y
+
is non-zero then
there is a fault in subsystem
1
s
s
i
G
+
or sensor
(1)si
k
+
Rule IV
: If
s
s
i
y
is non-zero and
(1)si
y
+
is zero then
there is a fault in sensor
s
i
k
These rules may be generalized to multiple faults.
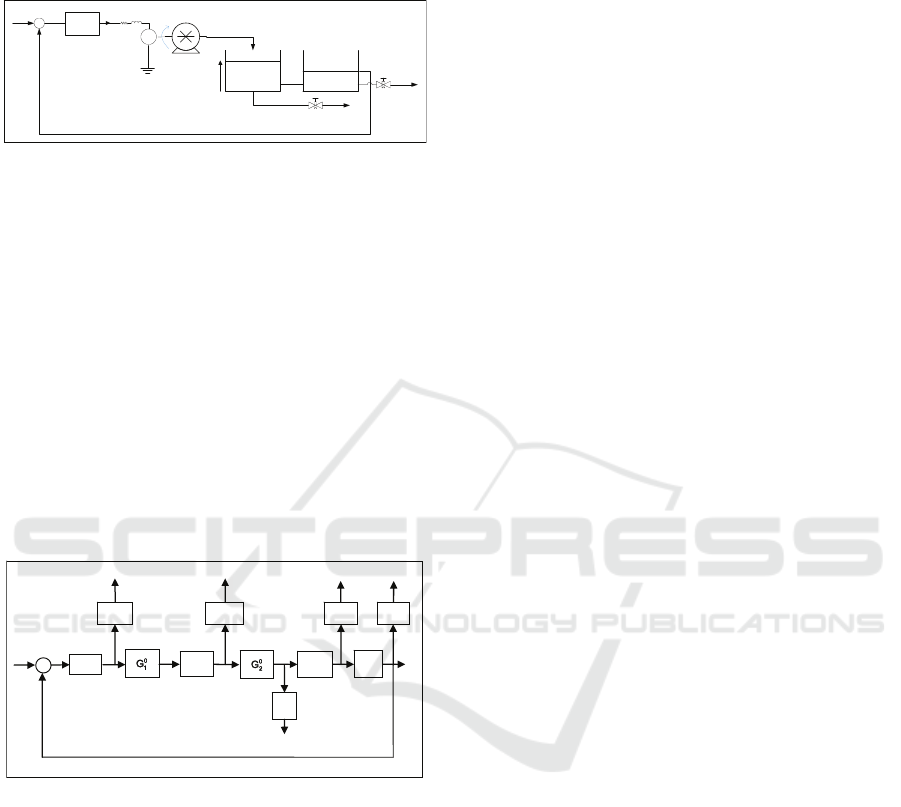
4 NEURAL NETWORK-BASED
FAULT DIAGNOSIS
A fault in the sensor,
s
i
k , and or in a subsystem,
i
G , can also be diagnosed by using a neural
network, as shown in Fig.3. The inputs to the neural
network are the spectrum of the coherence between
the fault-free and measured sensor outputs.
(4)
where
ω
is the frequency in rad/sec, and
(
)
(
)
0
()
i
cy j y j
ω
ω
is the coherence spectrum. If
there is no fault, then
()
(
)
0
() 1
i
cy j y j
ωω
= for all
frequencies. If the measured and fault-free outputs
are incoherent with each other at some frequencies,
then the coherence spectrum will be less than 1 at
those frequencies.
Figure 3: Neural Network-Based Fault Diagnosis Scheme.
5 MODEL-BASED FAULT
DIAGNOSIS
A bank of Kalman filters is employed to detect
faults. An i-th Kalman filter will be driven by the
signal
()ek , and the output of the i-th sensor output
i
y ,
(
)
ˆ
(1) () ( ) () ()
iiii iii
x
kAxkBekdKykyk+= + − + −
ˆˆ
() ()
iii
yk Cxk
=
(5)
where
d is the delay,
ˆ
i
x
is the estimate of the state,
i
x
,
(
)
,,
iii
A
BC is the state-space model of the
system with input
()ek and the sensor output, ()
i
yk.
The above-defined Kalman filter is applied to the
following transfer function model of the collection
of i sub-systems:
012 1 (1) 1
...
iisii
yGGGGk ev
−
−−
=
+
(6)
5.1 Kalman Filter Design
Let us consider a generic Kalman filter for a system
with input u and output, y. The Kalman filter is
()
()
()()
2
0*
0
2
2
0
,( )
() ()
ii
ii
ii
yj yj
cy j y j
yj yj
ωω
ωω
ω
ω
=
INTELLIGENT FAULT DIAGNOSIS USING SENSOR NETWORK
123

designed for the normal fault-free operation. The
model of the fault-free system is given by:
00
(1) () ( ) ()xk Axk Buk d wk+= + −+
0
() () ()yk Cxk kυ=+
(7)
Where
()
000
,,ABC are the system matrices
obtained from the fault-free system model,
()wk and
()vk are the zero-mean white plant and
measurement noise signals, respectively, with
covariances:
() ()
T
QEwkwk
⎡⎤
=
⎣⎦
, and () ()
T
REvkvk
⎡⎤
=
⎣⎦
(8)
The plant noise,
()wk , is a mathematical artifice
introduced to account for the uncertainty in the
a-
priori
knowledge of the plant model. The larger the
covariance
Q is, the less accurate the model
()
000
,,ABC is and vice versa.
The Kalman filter is given by:
(
)
00 0 0
ˆˆ ˆ
(1) () ( ) () ()xk Axk Buk d K yk Cxk+= + −+ −
0
ˆ
() () ()
ek yk Cxk=−
(9)
where
d is the delay and ()ek the residual.
The system model has a pure time delay which is
incorporated in the Kalman filter formulation. The
Kalman filter estimates the states by fusing the
information provided by the measurement
()yk
and the
a-priori information contained in the
model,
()
000
,,ABC . This fusion is based on the a
priori
information of the plant and the measurement
noise covariances, Q, and R, respectively. When Q is
small, implying that the model is accurate, the state
estimate is obtained by weighting the plant model
more than the measurement one. The Kalman gain,
0
K , will then be small. On the other hand, when R
is small implying that the measurement model is
accurate, the state estimate is then obtained by
weighting the measurement model more than the
plant one. The Kalman gain,
0
K , will then be large
in this case.
The larger
0
K is, the faster the response of the
filter will be and the larger the variance of the
estimation error becomes. Thus, there is a trade-off
between a fast filter response and a small covariance
of the residual. An adaptive on-line scheme is
employed to tweak the
a- priori choice of the
covariance matrices so that an acceptable trade-off
between the Kalman filter performance and the
covariance of the residual is reached.
5.2 Fault Isolation
Let
i
e be the residual of the i-th Kalman filter. A
fault in
0
G ,
1
G
2
G …or
i
G or
s
i
k is indicated if the
absolute mean of the residual exceeds a specified
threshold
th
σ .
Let us define a 2(N+1) by1 vector of zeros and ones.
012 012
... ...
iN N
bggg g
κκκ κ
=
⎡⎤
⎣
⎦
(10)
0
1
i
i
i
no fault in G
g
f
ault in G
⎧
=
⎨
⎩
(11)
0
1
s
i
i
si
no fault in k
f
ault in k
κ
⎧
=
⎨
⎩
(12)
Case I.
If the absolute mean of the i-th residual exceeds the
threshold
th
σ , then
i
b will be:
1 1 1 .... 1 ...
i
b X XX XX XXX
=
⎡⎤
⎣
⎦
(13)
where X is a don’t care value (0 or 1).
If the absolute mean of the (i+1)-st residual does
not exceed the threshold
th
σ , then
1i
b
+
will be:
1
0000 .... 0 ...
i
bXXXXXXX
+
=
⎡⎤
⎣
⎦
(14)
The intersection between the 2 binary sets
i
b and
1i
b
+
, amounting to an element-wise binary logical
ANDing of these 2 sets, will then clearly indicate
that the sensor
s
i
k is the faulty one.
Case II.
If the absolute mean of the ith residual does not
exceed the specified threshold
th
σ , then
i
b will be:
0 0 0 .... 0 ...
i
bXXXXXXXX
=
⎡⎤
⎣
⎦
(15)
If the absolute mean of the (i+1)-st residual
exceeds the specified threshold
th
σ , then
1i
b
+
will
be:
1
1 1 1 1 .... 1 ...
i
bXXXXXXX
+
⎡
⎤
=
⎣
⎦
(16)
This shows that the intersection between the 2
binary sets
i
b and
1i
b
+
, amounting to an element-
wise binary logical ANDing of these 2 sets, will
then clearly indicate that either the sensor
(1)si
k
+
or
subsystem
(1)si
G
+
is the faulty one.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
124
6 EVALUATION OF THE
PROPOSED SCHEME
o
Q
pump
dc motor
i
ω
i
Q
leakage
L
R
1
H
2
H
controller
Q
A
outflow
inflow
Figure 4: Two-tank Fluid System.
An evaluation of the proposed scheme for fault
diagnosis was performed on a benchmark
laboratory-scale process control system using
National Instruments LABVIEW as shown in Fig 4.
Fault diagnosis in a fluid system has enjoyed an
increasing importance and popularity in recent years
from the points of view of economy, safety,
pollution, and conservation of scarce resources
(Marco Ferrente, 2008) (Zhang Sheng,
2004)(Doraiswami, 1996) (R.J. Patton,
2000)(Astrom et.,al, 2001) (C. De Persis, 2000)(
H.
Hammouri
, 2002) (K.M. Kinnaert, 1999).
The proposed scheme is used to detect and isolate
a fault by a sequential integration of model-free and
model-based approaches.
y
m
y
2
y
1
y
0
y
q
l
leakage
r
e
tank
actuator
controller
u
a
u
G
0
γ
a
1-γ
l
γ
s
γ
l
k
s1
k
s2
k
s0
k
s3
Figure 5: Fluid system subject to a leakage.
We will use a set of fuzzy logic rules to detect a
leakage. The fuzzy IF and THEN rules for the two-
tank fluid system are derived using the sensor
network shown in Fig.1. For the fault diagnosis
problem, the equivalent of Fig. 1, is shown in Fig. 5
whose various sub-systems and sensor blocks are all
explained below. First, note that the first two blocks
in Fig. 5, i.e.
0
G and
0
11
a
GG
γ
= , represent the
controller and the actuator sub-systems, respectively.
As shown in Fig. 5, the leakage is modelled by the
gain
γ
A
which is used to quantify the amount of
flow lost from the tank. Thus the net outflow is
quantified by the gain (
1
γ
−
A
). Since the two blocks
0
2
G and (1
γ
−
A
) cannot be dissociated from each
other, they are fused into a single block labelled
(
)
0
22
1GG
γ
=−
A
. The feedback sensor, modelled by
the gain
s
f
k , is used to feed the plant output y back to
the controller, and is modelled by the last block
3
G
in Fig. 3, where
3
s
f
Gk
=
. An additional sensor,
termed as the redundant sensor of gain
2
s
k , is used
here to discriminate between faults in the height
sensor and feedback sensor. Even though the
control input
u does not necessitate a separate sensor
to monitor its output as it is freely available from the
digital controller (
0
G ), a separate unit gain, labelled
0
1
s
k
=
, is attributed to it. Similarly, the last sensor,
used to monitor the feedback sensor output, is also
attributed a unit gain, i.e.
3
1
s
k = . The reason for
adding these two unit gains to Fig. 5 is motivated by
our desire to make the overall sensor network
structure for the leakage detection problem fit in
well within the general sensor network-based fault
detection paradigm shown in Fig. 3. By doing so, the
two fuzzy rules (Rules 1 and 2 given earlier) can be
readily applied to Fig. 5. The four residuals,
0
r ,
1
r ,
2
r and
3
r , are the deviations between the fault-free
and fault-bearing measurements of the control input
, flow rate, height from the redundant sensor, and
height from the feedback sensor, respectively.
6.1 Fault Diagnosis using a Model-free
Approach
A sequential integration of an artificial neural
network (ANN) and a fuzzy logic (FL) approach is
employed here to isolate faults.
Fuzzy-logic Approach. The features were chosen
to be the steady-state values of the control input,
s
s
u ,
measured flow
s
s
f
lw and height
s
s
h values and their
fault-free counterparts,
0
s
s
u ,
0
s
s
f
lw and
0
s
s
h , respecti-
vely. The fuzzy logic rules pertinent to this case are
similar to those described earlier.
The steady-state gain relating
s
s
f
lw and
s
s
u is
given by:
01
s
sssss
ss
f
lw G G u=
(17)
The steady-state gain relating
s
s
h and
s
s
u is
given by:
01 2
s
sssssss
ss
h GGGu=
(18)
INTELLIGENT FAULT DIAGNOSIS USING SENSOR NETWORK
125
Where
01 2
,,
s
sssss
GGG
are the steady-state gains of
the actuator, the transfer function relating the control
input to the flow, and the transfer function relating
the flow to the height, respectively.
The fuzzy IF
-and-THEN rules given in the
previous section can isolate a leakage from faults in
the actuator, flow and height (or level) sensor.
Neural Network Approach. A neural network is
driven by the coherence spectrum between the
measured height
h and the corresponding fault-free
one
0
h . This coherence spectrum is defined by:
(19)
The neural network is trained to classify four
possible faults, namely a fault in the actuator, a fault
in the level sensor, a fault in the flow sensor, and a
leakage.
The fuzzy approach is then integrated
sequentially with the neural network-based fault
classification approach to complete the required
fault isolation scheme. The Neural Network-based
classifier precedes the Fuzzy Logic-based one, with
the former providing a fast fault classification,
followed by a fuzzy logic block to unravel the real
cause(s) of the fault. The fault magnitude is
estimated from the changes in the settling time,
0
s
ss ss
tttΔ= − , whereas its onset is indicated by the
changes in the height profile.
Figs 6-8 give the profiles of the flow, height and
the coherence spectrum. Fig. 6 shows height profiles
in the presence of leakages of different magnitudes
occurring when the fluid level system is operated in
both an open-loop and a closed-loop configuration.
For the open-loop case, one can readily deduce both
the onset and amount of the leakage from the
height/flow profile. The leakage flow has five
sections corresponding to the following five degrees
of no-leakage, small, medium, large and very large
leakage. However, by its very nature, the closed-
loop PI controller hides the fault and hence makes it
difficult to visually detect it.
0 200 400 600 800 1000 1200 1400 1 600 1800 2000
50
100
150
200
250
300
time t
Hydraulic Height
Height /Flow Profiles for PI Controll er with Consumer
no leakage
small
medium
large
very large
0 200 400 600 800 1000 1200 1400 1 600 1800 2000
0
1
2
3
4
5
time t
Hydrauli c Fl ow
no leakage
small
medium
large
very large
0 0. 1 0.2 0. 3 0.4 0.5 0.6 0. 7 0. 8 0.9 1
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
frequency
coherenc e
coherenc e spec trum of leak age faults
large
medium
small
Figure 6: Height/Flow Profile/Coherence under leakage
Faults.
0 200 400 600 800 1000 1200 1400 1600 1800 2000
0
100
200
300
time t
Hydraulic Height
Height/ Flow Profiles for PI Controller wi th Cons umer
act uator fault=0. 25
act uator fault=0. 50
act uator fault=0. 75
act uator fault=1. 0
0 200 400 600 800 1000 1200 1400 1600 1800 2000
0
2
4
6
time t
Hydraulic Flow
act uator fault=0. 25
act uator fault=0. 50
act uator fault=0. 75
act uator fault=1. 0
0 0. 1 0.2 0. 3 0. 4 0. 5 0.6 0.7 0.8 0.9 1
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
frequency
coherenc e
coherenc e spec trum of ac tuato r faults
large
medium
small
smaller
Figure 7: Height/FlowProfile/Coherence under actuator
faults.
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
100
200
300
time t
Hydrauli c Height
Height /F low for PI Cont roller with Con sum er
sensor fault=0.25
sensor fault=0.50
sensor fault=0.75
sens or fault=1.0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
2
4
6
time t
Hydraulic Flow
sens or fault=0.25
sens or fault=0.50
sens or fault=0.75
sens or fault=1.0
0 0. 1 0.2 0. 3 0. 4 0. 5 0.6 0.7 0.8 0.9 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
frequency
coherenc e
coherenc e spec trum of s ensor fault s
large
medium
small
smaller
Figure 8: Height/Flow Profile/Coherence under level
sensor faults.
6.2 Model of the Fluid System
A benchmark model of a cascade connection of a dc
motor and a pump relating the input to the motor,
u,
and the flow,
i
Q , is a first-order system expressed
by:
()
imim
QaQbu
φ
=− +
(20)
where
m
a and
m
b are the parameters of the motor-
pump system and
()u
φ
is a dead-band and
saturation-type nonlinearity. The Proportional and
Integral (PI) controller is given by:
32
3pI
x
erh
ukekx
=
=−
=+
(21)
where
p
k and
I
k are gains and r is the reference
input.
With the inclusion of the leakage, the liquid level
system is modelled by (Astrom et al., 2001):
()()
1
112121i
dH
A
QC H H C H
dt
ϕϕ
=− − −
A
(22)
()()
2
2121202
dH
A
CHHCH
dt
ϕϕ
=−−
(23)
where
(.) (.) 2 (.)
s
ign g
ϕ
= ,
()
1
QC H
ϕ
=
AA
is the
leakage flow rate,
()
00 2
QC H
ϕ
= is the output flow
rate,
1
H
and
2
H
are the liquid heights in tanks 1 and
2, respectively,
1
A
and
2
A
are the cross-sectional
areas of tanks 1 and 2, respectively, g=980
2
/seccm
is the gravitational constant,
12
C and
o
C are the
()
()
()
()
2
0*
0
2
2
0
()
,( )
()
hjhj
ch j hj
hj hj
ωω
ωω
ω
ω
=
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
126
discharge coefficients of the inter-tank and output
valves, respectively. The linearized model of the
entire system formed of the motor, pump, and the
tanks is given by:
x
Ax Br y Cx=+ =
(24)
11 1
1
22
2
3
0
00
,,
1000
0
001 , [1000]
mp mI m
i
T
mp
aa b
h
aa
h
xA
x
bk bk a
q
BbkC
α
β
−−
⎡⎤
⎡⎤
⎢⎥
⎢⎥
−−
⎢⎥
⎢⎥
==
⎢⎥
⎢⎥
−
⎢⎥
⎢⎥
−−
⎢⎥
⎣⎦
⎣⎦
⎡⎤
==
⎣⎦
(25)
Where
i
q , q
A
,
0
q ,
1
h and
2
h are respectively the
increments in
i
Q , Q
A
,
o
Q ,
0
1
H
and
0
2
H
,
1
a ,
2
a ,
α
and
β
are parameters associated with linearization,
α
is associated with leakage and
β
is the output
flow rate,
1
qh
α
=
A
,
2o
qh
β
= .
6.3 Evaluation of the Fault Detection
using a Bank of Kalman Filters
A bank of two Kalman filters is used here, one with
input u(k) and the flow-sensor output, and the other
with input u(k) and the height-sensor output
First the fault-free model of the system is
identified using a recursive least-squares
identification scheme. The order of the estimated
model was iterated to obtain an acceptable model
structure using a combination of the AIC criterion
and the identified pole locations.
The identified model is essentially a second-order
system with a delay even though the theoretical
model is of a fourth order. Using the fault-free
model together with the covariance of the
measurement noise, R, and the plant noise
covariance, Q, the Kalman filter model was finally
derived. As it is difficult to obtain an estimate of the
plant covariance, Q, a number of experiments were
performed under different plant scenarios to tune the
Kalman gain,
0
K .
()
ˆˆ ˆ
(1) () ( ) () ()
iiiii iiii
xk Axk Buk d Kyk Cxk+= + −+ −
(26)
ˆ
() () () 1,2
iii
rk yk Cx k i=− = (27)
where
i
x
is the state,
i
r is the residual, (,, )
iii
A
BC is
the state-space model of the first subsystem relating
the control input
()uk to the flow output ()
i
yk. The
transfer function for the first subsystem
111
(,, )
A
BC relating the control input ()uk to the
flow output
1
()yk.
101
() () ()()yz GzGzuz
=
(28)
where
0
G is the actuator transfer function and
1
G is
the transfer function relating the actuator output to
the flow.
222
(, , )
A
BC is the state-space model for
the second subsystem relating the control input
()uk
to the height
2
()yk. The transfer function for the
second subsystem
222
(, , )
A
BC relating the control
input
()uk to the height output
2
()yk
2012
() () () () ()yz GzGzGzuz
=
(29)
where
2
G is the transfer function relating the flow to
the height.
In this case, four possible fuzzy rules can be
derived, two of which are stated in the following:
• If
1
1
1
()
N
thr
i
ri
N
σ
=
>
∑
, then there is a
fault in
0
G ( subsystem 0) or
1
G
( subsystem 1) or in the flow-sensor,
• If
2
1
1
()
N
thr
i
ri
N
σ
=
>
∑
, then there is a
fault in
0
G ( subsystem 0) or
1
G
( subsystem 1) or
2
G ( subsystem 2) or
in the height-sensor (level-sensor).
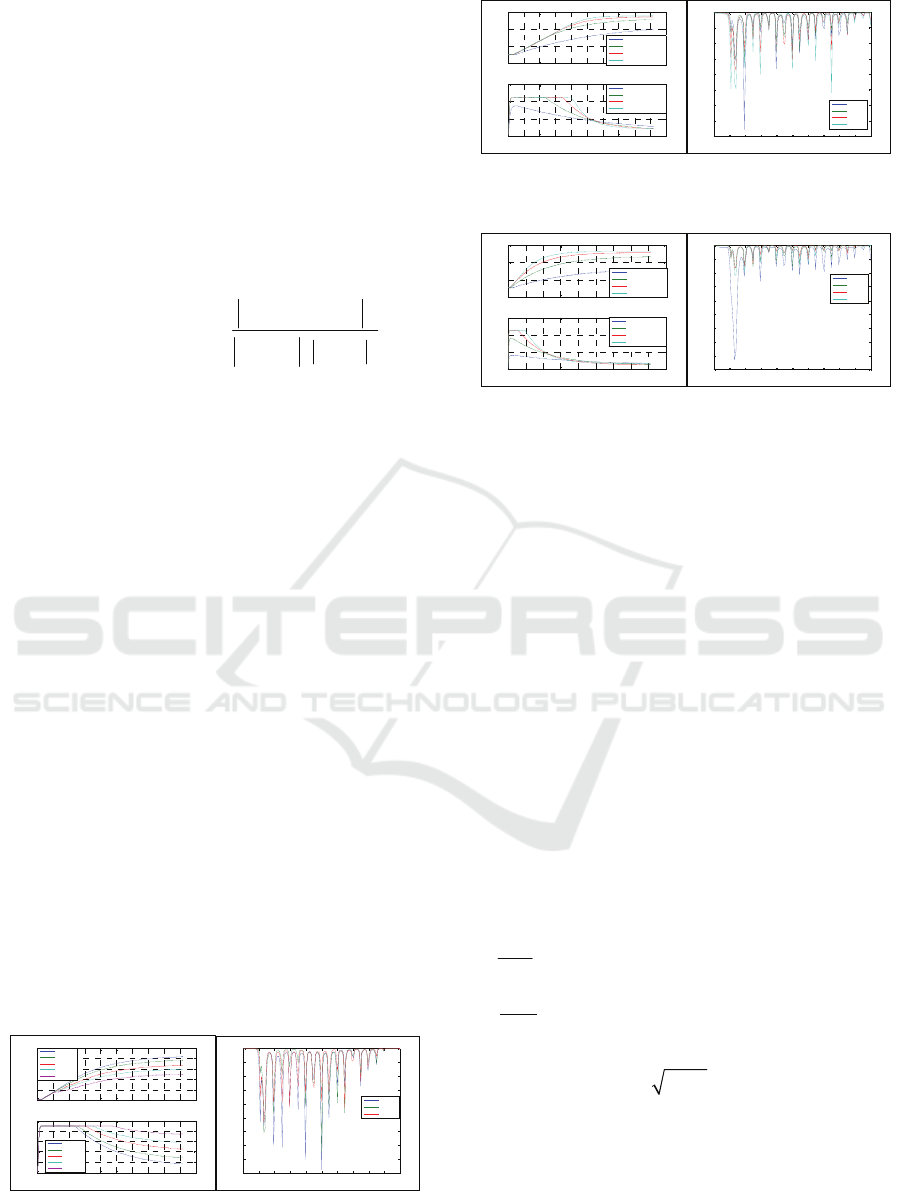
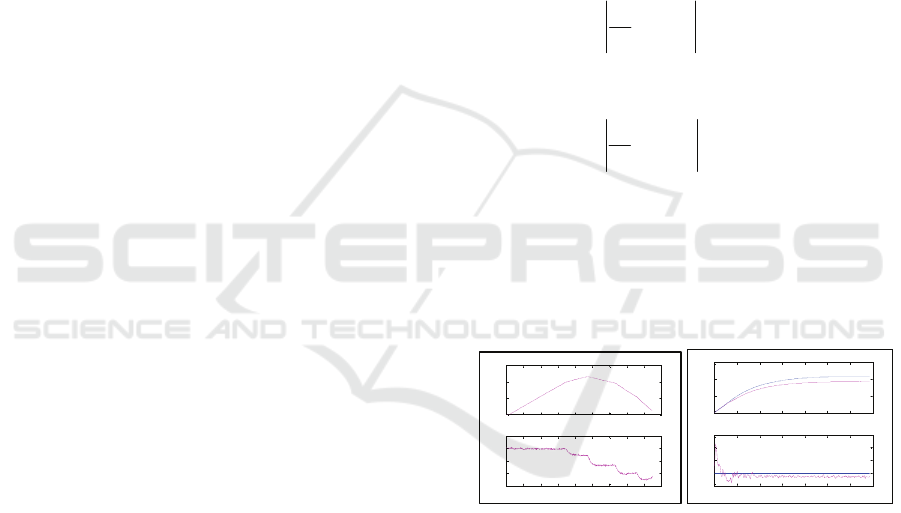
The Kalman filter bank was evaluated under
different fault scenarios for an ON-OFF controller, a
P controller, and a PI controller, as shown in Fig.9.
0 50 100 150 200 250 300 350
0
100
200
300
time
height s
heights for fault -free and faulty cas es
0 50 100 150 200 250 300 350
-2
0
2
4
6
residual
time
residual
Figure 9: Kalman filter results for an On-Off and PI
Controller: for Flow and Height under various leakage
magnitudes.
Comments: The model of the fluid system is
nonlinear, complex and stochastic. A simplified
linearized model which contains only the dominant
poles (as it was difficult to identify the fast
dynamics) was used in the design of the Kalman
filter bank. Results from the evaluation on the
physical system shows that the Kalman filter bank is
robust in modelling uncertainties including
nonlinearities and neglected fast dynamics, while at
the same time being sensitive to incipient faults.
0 100 200 300 400 500 600 700 800 900
0
50
100
150
time
height
The height profile and the residual of Kalman filter
0 100 200 300 400 500 600 700 800 900
-15
-10
-5
0
5
time
residual
residual
INTELLIGENT FAULT DIAGNOSIS USING SENSOR NETWORK
127

7 CONCLUSIONS
The proposed intelligent fault diagnostic scheme
based on a sequential integration of model-free and
model (Kalman)-based approach was found
promising when applied to a benchmarked
laboratory-scale two-tank system. The model-free
approach detects a presence of a possible fault from
the integration of both neural network and fuzzy
logic approaches. Results from the evaluation on the
physical system shows that the Kalman filter bank is
robust in modeling uncertainties including
nonlinearities and neglected fast dynamics, while
retaining its sensitivity to incipient faults. The
integration of fuzzy-logic and neural networks
proved itself to be a robust way of providing a quick
and reliable indication of a fault based on steady-
state measurements and height profile.
ACKNOWLEDGEMENTS
The authors wish to acknowledge the support of
KFUPM and the National Science and Engineering
Research Council (NSERC) of Canada, in carrying
out this work.
REFERENCES
S.X. Ding, “ Model-based Fault Diagnosis Techniques:
Design Schemes, Algorithms, and Tools” Springer-
Verlag 2008.
Silvio Simani, Cesare Fantuzzi and Ronald J Patton,
“Model-based Fault Diagnosis using Identification
Technique”, Advances in Industrial Control, Springer
Verlag, 2003.
Patton, R.J. Paul M. Frank, and Robert N. Clark, “Issues
in Fault Diagnosis for Dynamic Systems”, Springer-
Varlag, 2000.
Chen, J. and Patton, “Robust Model-based Fault Diagnosis
for Dynamic Systems”, Kluwer Academic Publishers,
1999.
Janos J. Gertler, “Fault Detection and Diagnosis in
Engineering Systems”, Marcel Dekker Inc, 1998.
R. Isermann, “ Fault diagnosis of Machines via parameter
estimation and knowledge processing”, Automatica,
Vol. 29, No.4, pp. 825-825, 1993.
R. Doraiswami, C.P.Diduch and Jiong Tang, “A
Diagnostic Model For Identifying Parametric Faults”,
IFAC World Congress, July 2008
R.Doraiswami, “Modelling and identification for fault
diagnosis: a new paradigm” Proceedings of the 10
th
International Conference on Control Applications,
September, 2001.
Marco Ferrente and Bruno Brunone, “Pipe system
diagnosis and leak detection by unsteady-state tests”,
Proceedings of the 7th World Congress on Intelligent
Control and Automation, Chongking, China, June 25-
27, 2008.
Zhang Sheng; Toshiyuki, A.; Shoji, H., “Gas leakage
detection system using Kalman filter”, 7th
International Conference on Signal Processing
Proceedings. ICSP '04, Volume 3, Aug31-Sept4.
2004, pp.:2533 - 2536
Doraiswami, R.; Sevenson, M.; Diduch, C.P
,”Autonomous control systems: monitoring, diagnosis
and tuning”, IEEE Transactions on Systems, Man and
Cybernetics, Part A, Volume 26, Issue 5, Sept.1996
pp. 646 – 655.
R.J. Patton, F.J. Uppal and C.J. Toribio, "Soft computing
approaches to fault diagnosis for dynamic systems: A
survey", in Proceedings of the IFAC Symposium
SAFEPROCESS 2000, Budapest-Hungary; 2000.
Astrom et.,al,” Control of Complex Systems”, Springer-
Verlag, 2001.
C. De Persis, “On the observability codistributions of a
nonlinear system” Systems and Control Letters,
Volume: 40, Issue: 5, August 15, 2000, pp. 297-304
H. Hammouri, P. Kabore, S.Othman, and J. Biston, J
“A. Failure diagnosis and nonlinear observer. Application
to a hydraulic process” Journal of The Franklin
Institute, Volume: 339, Issue: 4-5, July - August,
2002, pp. 455-478.
K.M. Kinnaert, “Robust fault detection based on observers
for bilinear systems”, Automatica, Volume: 35, Issue:
11, November, 1999, pp. 1829-1842.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
128
