
INVESTIGATIONS INTO ENHANCED ALERT MANAGEMENT
FOR COLLISION AVOIDANCE IN SHIP-BORNE INTEGRATED
NAVIGATION SYSTEMS
Michael Baldauf
1
, Knud Benedict
2
1
World Maritime University Malm
2
Hochschule Wismar University of Technology, Business and Design, Department of Maritime Studies Warnemünde
Sweden
Florian Motz, Sabine Höckel
Research Institute for Communication, Information Processing and Ergonomics, FGAN, Wachtberg, Germany
Keywords: Human Computer Interaction, Human Machine Interface, Alert Management, Collision Avoidance,
Intelligent Collision Warnings, Integrated Navigation Systems, Bridge Alert Management, e-Navigation.
Abstract: High sophisticated integrated navigation systems are installed on the ship navigational bridges to support
the operator of modern container ships. The integrated systems should assist the captains, navigation
officers and the pilots to avoid any dangerous situation when sailing from port of departure to the port of
destination. Numerous Human Machine Interfaces require interaction to control the voyage in every
situation under all possible circumstances. However, with respect to shipping statistics collisions and
groundings are major risks. This paper deals with investigations into the alert management on board modern
ships and potential approach to reduce the number of alarms. Results gained during several field studies on
board ships are presented. Based on these results the draft of a concept for reducing the high frequency of
collision warnings to be implemented into the navigation systems on board is discussed. First preliminary
results are introduced.
1 INTRODUCTION
In February 2008 the Norwegian classification
society Det Norske Veritas (DNV) published new
statistical figures on sea accidents. The figures
clearly showed that the number of accidents has
doubled over the last five years. DNV concluded
that this is caused mainly by the continued growth of
the world fleet and a shortage of officers with right
skills. On the other hand, technical failures were
mentioned more seldom.
It can be seen as another sample for Ironies of
Automation as described by Bainbridge (1983) –
that the majority of total losses in shipping is due to
collisions, groundings and contacts although there
are highly automated systems installed onboard
seagoing vessels to support the Officer of the Watch
(OOW) on the ships navigational bridge. Especially
with respect to the level of integration of the sensors,
equipment, displays and assistance systems those
navigational bridges can undoubtedly be defined as
highly-complex man-machine systems. Sherwood
Jones et al. (2006) discuss the management of alarm
systems and come to the conclusion that the role of
the OOW seems to become more an observer of the
navigational equipment instead of their situation
awareness being improved by such systems.
Recent field studies (Motz, Baldauf & Höckel,
2008) showed a lack of alert management. There are
superfluous alarms from several systems under
conditions of high traffic density especially in sea
areas near the coast and at harbour entrances. With
respect to implemented collision warnings there is a
lack of adjustment of the thresholds. In order to
better and effectively support the mariner onboard a
task- and situation-dependent representation of
encounter situation's parameter and information
basing on sufficient acquisition of reliable data and
169
Baldauf M., Benedict K., Motz F. and Höckel S. (2009).
INVESTIGATIONS INTO ENHANCED ALERT MANAGEMENT FOR COLLISION AVOIDANCE IN SHIP-BORNE INTEGRATED NAVIGATION
SYSTEMS.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Human-Computer Interaction, pages 169-174
DOI: 10.5220/0001954401690174
Copyright
c
SciTePress

its processing is an urgent demand and an actual
challenge for research and development.
To approach the problem a number of field
studies were performed on board of ships to
investigate the situation with respect to the
occurrence of alarms and their handling by the
bridge team. Based on the outcome of these studies
lacks and shortcomings of navigation systems
presently in use were identified and an approach to
reduce the number of false alarms is developed as
suggestion, taking into consideration available
technical system as e.g. ARPA (Automatic Radar
Plotting Aid) and AIS (Automatic Identification
System) information as well as new GNSS (Global
Navigation Satellite System) facilities. Within this
paper the used methods and selected results for
samples of the investigations are presented.
The investigations were performed under the
framework of two national research and
development projects funded by German Federal
Ministry of Education and Research and the German
Federal Ministry of Transport, Building and Urban
Affairs. The results of the studies are used to directly
support the work of the International Maritime
Organization regarding the development of new
performance standards for Bridge Alert Management
and to contribute to the further development of the e-
Navigation concept.
2 ONBOARD COLLISION
AVOIDANCE – PRESENT
SITUATION
As illustrated in the following figure the process of
collision avoidance in principle consist of three main
elements: "Situation Assessment", "Decision
Finding" and "Initiating and Control a measure to
avoid a dangerous encounter".
Figure 1: Simplified model of the on board process of
collision avoidance.
During the process of situation assessment the
OOW has to evaluate and assess the results of his
permanent observations in order to detect any risk of
collision with other objects in the vicinity of his own
ship. Today the additional information provided by
AIS contributes to better situational awareness as it
widely solves e.g. the problem of clear target
identification. In case of a situation with developing
or existing risk of collision, the OOW has to decide
when and by which initiated measure – usually a
manoeuvre to increase the expected passing distance
in due time – he can avoid a potential danger. This
decision making process should be supported by a
suitable collision warning, e.g. especially in multiple
encounters situations in areas with high traffic
density or when the OOW - by whatever reason -
has overseen such a developing situation. Finally,
the action has to be taken, its consequences have to
be controlled and, if necessary, to be corrected or
adjusted.
A detailed analysis of the investigation reports
dealing with collisions performed by the Nautical
Institute (Patraiko, 2008) showed that nearly 50% of
all collisions happened, because one of the involved
vessels had not recognised the other vessel.
3 INVESTIGATIONS AND
SELECTED RESULTS
A series of field studies was conducted on board of
ships to investigate the situation with respect to the
occurrence of alarms and their handling by the
bridge team. As the management and presentation of
alarms is influenced by the type of ship, the year of
construction, the installed equipment and grade of
integration, the sea area, the training and education
of the crew as well as by the safety standards of the
shipping company (Baldauf & Motz, 2006), these
factors were taken into account to obtain a profound
database.
The investigations aimed at several technical,
operational and human factors related aspects of the
situation onboard with respect to the alert occurrence
and handling. Within the context of this paper, the
focus is laid on results related to collisions warnings
triggered by and displayed at the ARPA-Radar
Human Machine Interface with integrated AIS
targets and superimposed by information of ECDIS
(Electronic Chart Display and Information System).
The timely distribution of alarms reflects the
dependence of the numbers of alarms from the sea
area. This hypothesis is further confirmed when
ICEIS 2009 - International Conference on Enterprise Information Systems
170
analyzing the registered alarms in relation to the
navigational situation.
The field studies were carried out on board of six
vessels, which were two ferries operating in the
Baltic Sea, three container vessels (with container
capacities of 6.200 TEU, 5.500 TEU and 7.500
TEU) and a cruise vessel operating in the
Mediterranean Sea. All vessels were built or
reconstructed within the time span from 2001 until
2007. The ships’ bridges were equipped differently;
the equipment (among others AIS devices) was
integrated on a medium or high integration level.
The investigations were conducted during
voyages in the Baltic Sea, in the Western
Mediterranean Sea, in the North Sea and in the
English Channel. The average time of observation
was 19 hours, with a minimum of 11 hours and a
maximum of 27 hours. Even though the
investigations took place on different times of the
year, usually good weather conditions were
experienced with low winds and calm sea. During
one voyage temporary rain showers were
encountered during the night. Another vessel was
sailing through fog banks with restricted visibility up
to 200m for two hours of its voyage. Comprehensive
analysis of alarm recordings were performed and are
described in more detail by Motz, Baldauf and
Höckel (2008).
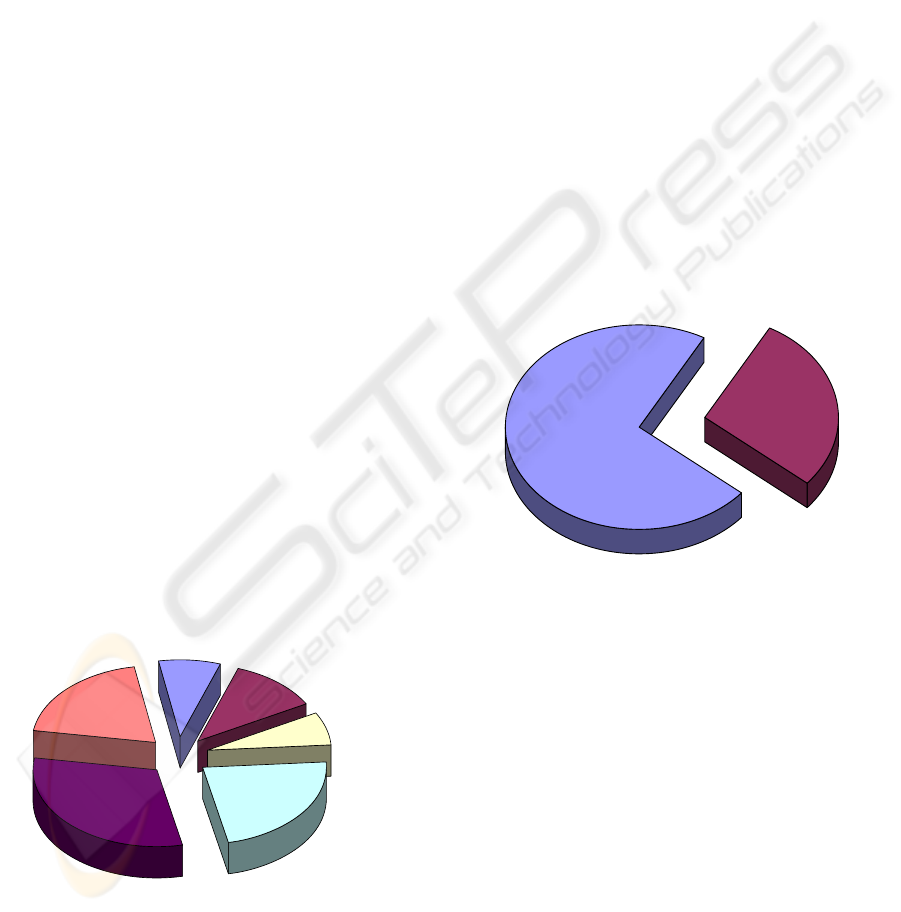
An important result of the analysed records was
that collision warnings form a major part of all types
of alarms registered during the studies. Figure 1
depicts the average percentage of the types of alarms
registered for the six vessels and highlights this
outcome. For all vessels investigated the majorities
of alarms are collision avoidance alarms together
with lost target alarms. Summed up they have a
portion of approximately 50%.
Waypoint alarms
8%
Off track / Off course
12%
Chart data warning
7%
Other
23%
Collision avoidance
alarms
30%
Lost target
20%
Figure 2: Average percentage for types of alarms for all
six vessels.
Additionally Figure 3 shows the average
percentages of the sources initiating collision war-
nings (CPA – (distance at) Closest Point of
Approach)/TCPA – Time to CPA) for all vessels
investigated. Both kinds of alarms were
predominantly caused by AIS information. This
percentage could have been even higher, if the
bridge team of one of the container vessel had not
chosen a radar setting without integration of AIS
information, which caused all CPA/TCPA and lost
target alarms to be initiated by radar information.
This result is to be expected because of the
technical configuration and the use of the automatic
alarm functions. For AIS, according to IMO
regulations, the same limit values have to be applied
as for tracked radar targets and the option for
CPA/TCPA calculation was switched on to sleeping
AIS targets by default. On the other hand a critical
fact is that 20% of all registered alarms are "Lost
target alarms", mainly caused by AIS. This is critical
as "Lost targets" are of minor importance compared
to safety-relevant collision warnings. Accordingly
their occurrence occupies the operator's attention
and workload capacity.
CPA/TCPA
Radar
28%
AIS
72%
Figure 3: Sources of collision warnings for all vessels of
the field studies.
Usual threshold configuration for CPA is from
0,5 to 1,0 nm and for TCPA from 12 to 15 min.
During the empirical studies it was observed that the
crew adapted the thresholds for CPA and TCPA
only very seldom. Moreover the navigating officers
often prefer to switch off the alarm by setting the
thresholds to zero. As investigated in former studies
(Baldauf, 1999) and confirmed by the results of
personal interviews based on structured
questionnaires, the navigators mentally use different
CPA limit values and adapt them especially
according to different types of situations (meeting on
opposite courses, overtaking or encounter on
crossing courses).
INVESTIGATIONS INTO ENHANCED ALERT MANAGEMENT FOR COLLISION AVOIDANCE IN SHIP-BORNE
INTEGRATED NAVIGATION SYSTEMS
171
4 APPROACH TO REDUCE THE
NUMBER OF COLLISION
WARNINGS
To guarantee the high safety standard in maritime
transport, as described above, there is a need to
reduce the number of alarms on board vessels. It is
necessary because the high frequency of occurring
alarms, obviously, do not contribute to a better
situation awareness of the watch keeping officers on
the ship's navigational bridge. Alarms should only
occur, if a real dangerous situation is developing and
the announcement confirms the mental risk
assessment of a well skilled and experienced
navigating officer.
This goal can be reached by combination and
pre-processing of available information to generate
and apply situation dependent thresholds for
example for the purposes of collision avoidance. In
this way, enhanced alert management of future
Integrated Navigation Systems (INS) will be able to
trigger more reliable collision warnings, but only in
that cases in which a navigator usually would have
to react.
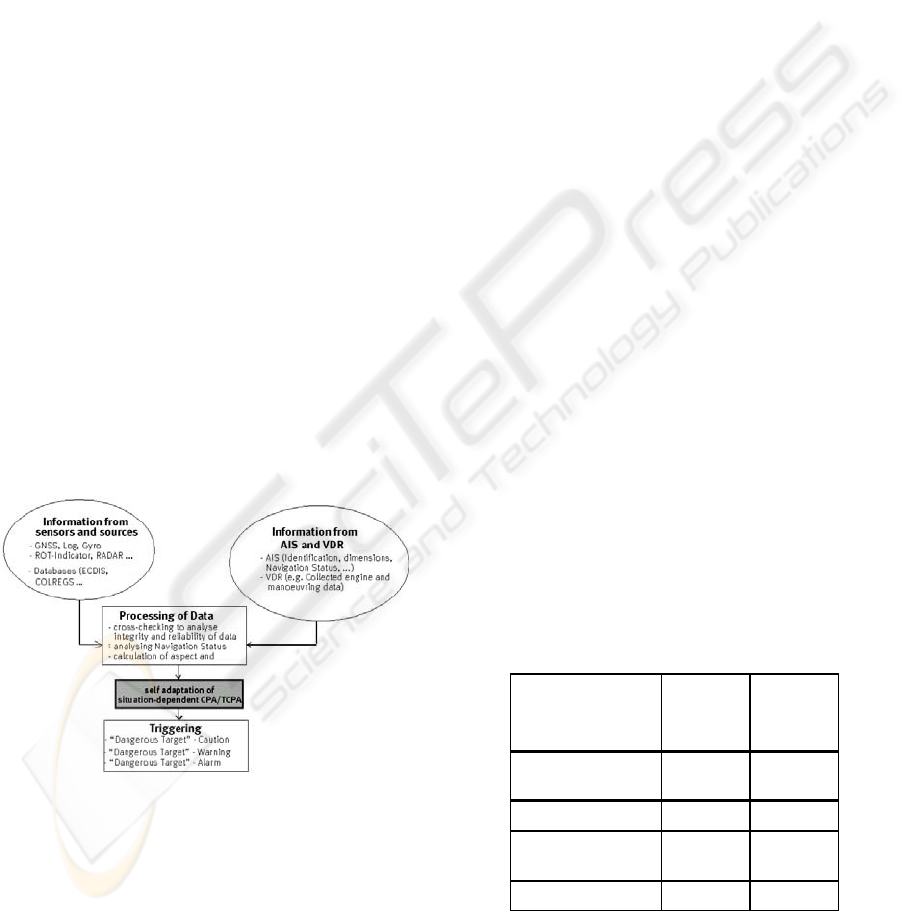
For that specific purpose a first generic concept
is drafted. It is aimed to combine target information
from different sensors and manoeuvring information
that will be provided by Voyage Data Recorders
(VDR) and from ECDIS as well. A visualisation is
given in Figure 4.
Figure 4: Generic concept for combined use of
information provided by INS to self-adapting and
triggering situation dependent collision warnings
Presently, modern anti-collision-systems
triggering alarms, when the calculated passing
distance at the closest point of approach (CPA) and
the time to CPA (TCPA) are less then the limits
freely configured by the navigator.
Core element of the approach for reducing the
number of collision alarms is a risk model for
situation assessment. This model differs between
three types of encounter situations (head-on
encounter, overtaking and meeting on crossing
courses) and is considering the two conditions of
visibility as they are laid down in the International
Rules for Preventing Collisions at Sea (Cockcroft &
Lameijer, 2004). Furthermore the concept is applied
to the new IMO definition of alerts given in the new
performance standards for INS (IMO, 2007) and
allows for introducing situation dependent collision
alert categories "Caution", "Warning" and "Alarm"
as well. Cautions and warnings may be switched off
by the operator, but alarms may not.
For self adaptation of thresholds, different CPA
limits are foreseen, which will be set according to
the hydrodynamic safe passing distance related to
the dimensions of the involved ships, the actual sea
area as well as visibility conditions.
As suggestion for initial basic values CPA limits
were determined by a detailed field study. To ensure
a wide range of user acceptance one emphasis was
laid on the navigators' behaviour. From the point of
view of well experienced navigators it is rather more
practical to determine the safe passing distance with
respect to usual data. Under pragmatic aspects and
according to the investigations performed it can be
assumed that the nominal safe passing distance has
to be in relation to the ship's length of the largest
vessel L
max
involved in an encounter situation (L
max
.
should not be less than 1 cbl). Taking into account
different kinds of encounter situations as defined by
the COLREGs a factor "f
x
" is necessary which
depends on the kind of situation "x" (Safe Passing
Distance (nominal) = f
x
• L
max
).
Table 1: Recommendation for basic values to calculate
situation dependent threshold.
kind of encounter
situation
f
x
(good
visibility)
f
x
(restricted
visibility)
head-on situation
meeting port/port-side
2.5 5
Overtaking 2.5 5
head-on situation
meeting stb/stb
5 10
crossing situation 5 10
The values, given in the table above, are derived
from several investigations and are suggested for the
four main kinds of encounter situations. These
values were proved by simulation studies and are
ICEIS 2009 - International Conference on Enterprise Information Systems
172
valid under the conditions "open sea" for good
(column 2) and restricted visibility (column 3).
The values derived here and used for this
approach are similar to values found by several other
studies (e.g. by Pietrzykowski & Uriasz (2009)) to
support safe manoeuvring in case of collision
avoidance.
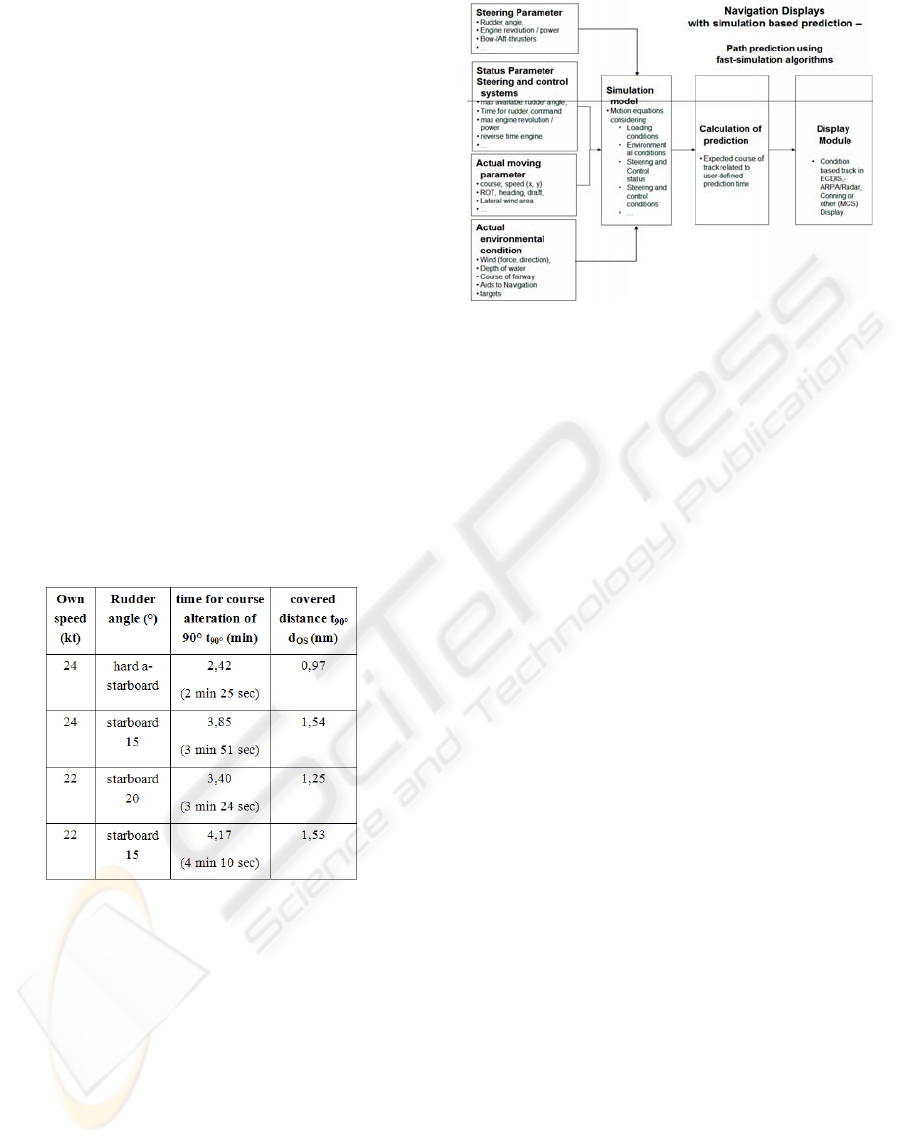
On the other hand recorded manoeuvring data
will be used for automatic adaptation of the TCPA
related limits of the dangerous target alarms, either
by taking them directly from a database or by
calculations using fast time simulation algorithms
(Benedict et al, 2006). The response time for turning
manoeuvre is a fundamental value to avoid a
collision. Such response times are only available to
captains on board for some standard manoeuvres and
they are usually neither exactly known nor
applicable to the prevailing circumstances of a
concrete dangerous situation to be solved. A sample
of a standard set of response times for a normal
sized container vessel with a capacity of 5.000 TEUs
is given in the following table.
Table 2: Response times for turning manoeuvre depending
on own ships speed and rudder angles.
As stated before, when applying the drafted
concept for situation dependent alarm thresholds
those values maybe be determined from direct
recordings of the continuously working VDR. The
principal application's structure and the relevant data
flows are given in the figure below.
Again the values suggested here roughly
corresponds with values coming from ship domain
studies (Goodwin (1975)) but also with results
applying new concepts to determine critical distance
for manoeuvring according to the COLREGs (e.g.
Rymarz (2007).
Figure 5: Principal application structure and data flow for
self-adaptation of thresholds for collision alerts.
First studies applying the situation dependent
thresholds for detection of dangerous encounter
situations in overall traffic scenarios in sea areas off
the coast monitored by VTS leads to a reduction of
the number of collision alerts by 40%.
5 SUMMARY AND OUTLOOK
Investigations into ship borne Alert Management
were performed and are continuously ongoing to
improve the situation on board. Investigations into
the present situation on board have shown that there
is an urgent need for the reduction of the high
frequency of alerts. Presently collision alerts have a
major portion of all alerts occurring during normal
ship operation. That is why a concept for situation
dependent thresholds for collision alerts is
developed. The concept considers the situation
assessment of experienced navigating officers by
allowing different values according the type of
encounter situation and visibility conditions as well.
Combining available information and data from
different sensors of modern Integrated Navigation
Systems it is suggested to determine the situation
dependent thresholds taking into account the ship
dimensions of the involved ships and the
manoeuvring characteristics valid for the concrete
situation. First studies performed for purposes of
shore based detection of dangerous encounter
situations have shown that a significant reduction
(up to 40%) of the collision alerts frequency is
possible.
The investigations were part of projects funded
by the German Ministry of Transport, Building and
Urban Affairs and the German Ministry of
Education and Research. The results directly support
INVESTIGATIONS INTO ENHANCED ALERT MANAGEMENT FOR COLLISION AVOIDANCE IN SHIP-BORNE
INTEGRATED NAVIGATION SYSTEMS
173

the work of the International Maritime Organization
developing new performance standards for Bridge
Alert Management and contribute to the e-
Navigation concept.
The authors would like to thank the shipping
companies Peter Döhle, TT-Lines, Finnlines,
Scandlines, HAPAG-Lloyd and AIDA Cruises Ltd
for their grateful assistance and all mariners who
provided their knowledge in interviews on board.
REFERENCES
Bainbridge, L., 1983. Ironies of Automation. in:
Automatica, 19, p 775-779.
Baldauf, M., 1999. Development of an algorithm for
automatic detection of dangerous traffic situations
using situation-dependent risk parameter and
application to VTS monitoring (in German) PhD
Thesis, Bergische Universität, Wuppertal 1999
Baldauf, M., 2004. Enhanced Warning Functions for on
board Collision Avoidance using AIS and VDR
information, In: R. Dauer, A. de la Pena, J. Puig
(editors): International Congress on Maritime
Technological Innovations and Research -
Proceedings. SCI UPC, Barcelona, ISBN 84-7653-
861-8.
Baldauf, M., Motz, F., 2006. Operational Aspects of future
Alert Management to support ship navigation. (in
German) In: Morten Grandt (ed.): Cognitive Systems
Engineering in der Fahrzeug- und Prozessführung.
DGLR-Bericht 2006-02, Bonn, ISBN 3-932182-51-0.
Benedict, K.; Baldauf, M.;. Kirchhoff, M.; Koepnick, W.;
Eyrich,R., 2006. Combining Fast-Time Simulation and
Automatic Assessment for Optimising Tuning of
Simulator Ship Models. MARSIM - International
Conference on Marine Simulation and Ship
Manoeuvrability, Terschelling NL, 25 - 30 June 2006
Cockcroft, A.,N.; Lameijer, I.N.F., 2004. A guide to the
Collision Avoidance Rules: International Regulations
for Preventing Collisions at Sea.. 6
th
edition, Elsevier
Butterworth-Heinemann, Oxford. Januar 2004
Earthy, J., 2006. Alarm systems – a significant threat to
safety. in: Digital Ship, issue June/July 2006, pp. 32-
33.
Goodwin, E. (1975). A statistical study of ship domains.
The Journal of Navigation, 28, No. 3, Oxford, January
1975
IMO, 2007. Revised performance standards for integrated
navigation systems (INS). MSC.252(83). London:
International Maritime Organization.
Motz, F. & Baldauf, M., 2007. Investigations into
Shipborne Alarm Management - Conduction and
Results of Field Studies. Proceedings of the 9th
International Conference on Enterprise Information
Systems, Volume HCI (pp. 136-141). Funchal,
Portugal.
Motz, F., Baldauf, M. & Höckel, S.; 2008. Field Studies
Onboard Regarding Bridge Alert Management.
(Paper) Proceedings of the International Symposium
Information on Ships. 18-19 September 2008
Hamburg, Germany.
Patraiko, D. 2008. Engaging the Navigator. Proceedings
of the Navigation Conference – Navigation and
Location: Here we are!. Church House, Westminster,
London (UK), 28-30 October 2008
Pietrzykowski, Z. , Uriasz, J. 2009. The Ship Domain – A
Criterion on Navigational Safety Assessment in an
Open Sea Area. The Journal of Navigation, 62,
Number 1, Oxford, January 2009
Rymarz, E.W. 2007. The determination of a minimum
critical distance for avoiding action by a stand-on
vessel as permitted by Rule 17a) ii). In: Weintrit, A.
(editor): Advances in Marine Navigation and Safety of
Sea Transportation. Monograph, Gdynia, ISBN 978-
83-7421-018-8.
Sherwood Jones, B.M., Earthy, J.V.; Fort, E.; Gould, D.
2006. Improving the design and management of alarm
systems. Proceedings of the World Maritime
Technology Conference, London, March 2006
ICEIS 2009 - International Conference on Enterprise Information Systems
174
