
Performance Assessment of Patch-based Bilateral
Denoising
Arnaud de Decker
1
, John Aldo Lee
2
and Michel Verleysen
1
1
Machine Learning Group, Universit
´
e catholique de Louvain
pl. du Levant 3, 1348 Louvain-la-Neuve, Belgium
2
Molecular Imaging and Experimental Radiotherapy StLuc University Hospital
Universit
´
e Catholique de Louvain, av. Hippocrate 54, 1200 Bruxelles, Belgium
Abstract. In the field of medical image analysis, denoising is one of the most
important preprocessing steps before medical analysis. The design of an effi-
cient, robust, and computationally effective edge-preserving denoising algorithm
is a widely studied, and yet unsolved problem. One of the most efficient edge-
preserving denoising algorithms is the bilateral filter, which is an intuitive gener-
alization of the local M-smoother. In this paper, we propose to modify both the
bilateral filter and the local M-smoother to use patches of the image instead of
single voxels in the denoising process. Using patches instead of single voxels in
the filtering process is a way to adapt the filter to the textures, ramps, and edges
of the image, and make the filter more discriminant. The filtering performances
of the patch-based algorithms are evaluated on a benchmark and a CT phantom
image and compared to the bilateral filter and local M-smoother.
1 Introduction
Nowadays, medical images are essential tools for medical doctors. They are used in ra-
diotherapy, nuclear medicine, radiology, oncology, and many other fields of medicine.
However, they are often polluted by noise and blur. These problems can induce misin-
terpretations and lead to errors in diagnosis and treatment. For example, in radiotherapy,
it is of crucial importance to have a precise identification of the volumes to be treated.
For this reason, the first and more important preprocessing step after the acquisition of
a medical image is to use a filtering algorithm in order to get rid of the noise before the
actual analysis.
In denoising methods, the challenge is to obtain a filtering effect powerful enough
to remove most of the noise generated during the acquisition process while preserving
the edges and textures in the image. This problem becomes even more complicated
for medical images as they often have a relatively low resolution. Furthermore, a filter
which does not preserve edges accurately blurs the image, which reduces the resolution
even more.
Several algorithms have been used for unsupervised edge-preserving denoising of
medical images: wavelet transform [1], [2], partial differential equations [3], total vari-
ation [4], Bayesian denoising [5], kernel regression [6], gradient approximation [7] ,
de Decker A., Aldo Lee J. and Verleysen M. (2009).
Performance Assessment of Patch-based Bilateral Denoising.
In Proceedings of the 1st International Workshop on Medical Image Analysis and Description for Diagnosis Systems, pages 52-61
DOI: 10.5220/0001813900520061
Copyright
c
SciTePress

local M-smoother [8], [9], bilateral [10], [11], or even trilateral filtering [12]. Kervrann
also used patch based algorithms [13], [14] for denoising purposes.
Among these algorithms, the bilateral filter (BF) and the local M-smoother (LMS)
have been quite popular lately because of their intuitive formulation, their low compu-
tational load, and their efficiency in terms of edge-preserving denoising performances.
Still, while the BF and LMS algorithms are excellent for piecewise constant images
denoising, their performances drop significantly when the image is blurred or contains
ramps, which is the case in most realistic situations. Indeed, these algorithms are based
on the principle of mode identification. When the image is not piecewise constant, there
is no mode to identify and the filters become less efficient.
In this paper, we propose to generalize the BF algorithm to use subsets of adjacent
voxels of the image, called patches, instead of single voxels. As these patches are com-
posed of more than one voxel and gather information in 2 or 3 dimensions around their
center, the filtering becomes more selective and the performance of this patch-based
bilateral filtering (PBBF) improves.
The rest of this paper are organised as follows. In Section 2 we will define the image
model, and briefly introduce the local M-smoother and the bilateral filter algorithms.
Then, we will describe how patches are introduced in these classical algorithm. The
benchmark image we used to test the filtering performances in this paper is introduced
in Section 3 with a comparison of the performances and visual results of the algorithm
with state-of-the art BF and LMS. Finally, Section 4 gathers the conclusions and future
perspectives.
2 Image Model and Patch-based Bilateral Filter
2.1 Image Model
Let us define a D-dimensional image as a vector of voxels in which the i
th
voxel position
can be uniquely identified by vector x
i
= (x
i
1
, . . . , x
i
D
). The voxel at coordinate x
i
has
an observed intensity f
i
which can be decomposed in two part: the real image u
i
and
the noise ε
i
:
f
i
= u
i
+ ε
i
. (1)
In further developments, we will assume ε
i
is white and Gaussian. This is not the
case for most medical images. However it is usually possible to come back to a gaussian
denoising problem by an appropriate transformation of the data. The derivation of the
BF and LMS in this section follows [15], [8] where more details can be found.
2.2 Gaussian Filter
Local filtering can be achieved by averaging the values of the voxels in a neighborhood
N
i
of the voxel i. The filtering process can be described as the minimisation of the error
function
E(
ˆ
u) =
1
2
I
∑
i=1
∑
j∈N
i
w
i j
( ˆu
i
− f
j
)
2
, (2)
53
where u is the vector with the filtered voxels, I is the total number of voxels in the
image, w
i j
is the fixed weight of the contribution of f
j
. The optimal solution is obtained
by derivating this function with respect to
ˆ
u. Equating this derivative with zero allows
us to identify the optimum
ˆ
u as
ˆ
u
i
=
∑
j∈N
i
w
i j
f
j
∑
j∈N
i
w
i j
. (3)
The weights w
i j
can be defined as a hard or soft window as long as they vanish
when the distance to the i
th
voxel increases. The most common choice for the weights
is a soft window defined by a gaussian kernel:
w
i j
= exp
−
kx
i
− x
j
k
2
2ρ
2
. (4)
The width of the kernel is determined by parameter ρ. While this is an efficient filter-
ing scheme for Gaussian noise, this filter smoothes the edges of the image. However, it
can easily be modified into an edge-preserving filtering scheme: the local M-smoother.
2.3 Local M-Smoother
From the gaussian filter, it is possible to obtain an edge-preserving filtering algorithm
if the error function is modified as follows
E(
ˆ
u) =
I
∑
i=1
∑
j∈N
i
w
i j
Ψ
1
2
( ˆu
i
− f
j
)
2
. (5)
The key idea is to assume that there are two or more constant signals (or modes)
mixed in the neighborhood N
i
. The error function should separate the modes and thus
prevent the image from being blurred during the filtering process. This can be done if
Ψ is defined as
Ψ(
1
2
s
2
) = 1 − exp
−
s
2
2σ
2
, (6)
instead of a classical squared difference. This is a mode estimator, as typically used in
robust statistic estimation.
It is now possible to minimize E(
ˆ
u) by gradient descent [15], which leads to the
expression of the local M-smoother:
ˆu
k+1
i
=
∑
j∈N
i
w
i j
Ψ
0
1
2
( ˆu
k
i
− f
j
)
2
f
j
∑
j∈N
i
w
i j
Ψ
0
1
2
( ˆu
k
i
− f
j
)
2
. (7)
In this equation, Ψ
0
is the derivative of equation (6) and is called the radiometric
kernel. A common way to initialise this filter is to use u
0
i
= f
i
as a starting guess.
54

2.4 Bilateral Filter
The bilateral filter is an intuitive generalization of the local M-smoother. In the bilateral
filter, u
k
i
, the values of the voxels in the neighborhood of x
i
, are compared to u
k
j
, the
current estimated image, instead of f
j
, the observed image. The algorithm becomes
ˆu
k+1
i
=
∑
j∈N
i
w
i j
Ψ
0
1
2
( ˆu
k
i
− ˆu
k
j
)
2
ˆu
k
j
∑
j∈N
i
w
i j
Ψ
0
1
2
( ˆu
k
i
− ˆu
k
j
)
2
. (8)
This modification also means that the filter becomes non local as the intensities
which were out of the neighborhood of ˆu
k
i
may have played a role in the determination
of ˆu
k
j
at a precedent step. Because of this diffusion process, the BF can converge to a
constant image and has to be stopped after a few iterations.
2.5 Patch-based Bilateral Filter
Although the bilateral filter produces excellent results for a piecewise-constant image,
the filtering performances drop significantly on the edges and ramps. We propose to
use a higher number of pixels in order to separate the modes on more information than
a single voxel. Let us define patch P
k
i
as the p × p × p subset of voxels of the image
at iteration k, centered on x
i
. The weights between the voxels in x
i
and x
j
can now be
calculated using d(P
i
, P
j
), the distance between patches P
i
and P
j
ˆu
k+1
i
=
∑
j∈N
i
w
i j
Ψ
d(P
k
j
, P
k
i
)
ˆu
k
∑
j∈N
i
w
i j
Ψ
d(P
k
j
, P
k
i
)
. (9)
The distance function can be chosen according to the noise model and the specifici-
ties of the image. The most obvious choice is to use the L
2
distance
d(P
k
j
, P
k
i
) =
s
N
∑
n=1
(P
k
j
n
− P
k
i
n
)
2
, (10)
where P
k
j
n
is the n
th
voxel in patch P
k
j
and N is the total number of voxels in a patch.
Other types of distances can be considered depending of the properties desired from the
filtering algorithm.
It is also possible to introduce the patch concept in the local M-smoother algorithm.
In this case, the patch centered in x
i
would be constructed from the original image f :
ˆu
k+1
i
=
∑
j∈N
i
w
i j
Ψ
d(P
k
j
, P
0
i
)
f
j
∑
j∈N
i
w
i j
Ψ
d(P
k
j
, P
0
i
)
. (11)
If the patch size is set to 1 and the distance used is L
2
, the PBBF and PBLMS
algorithms are equivalent to the classical BF and LMS, respectively.
55
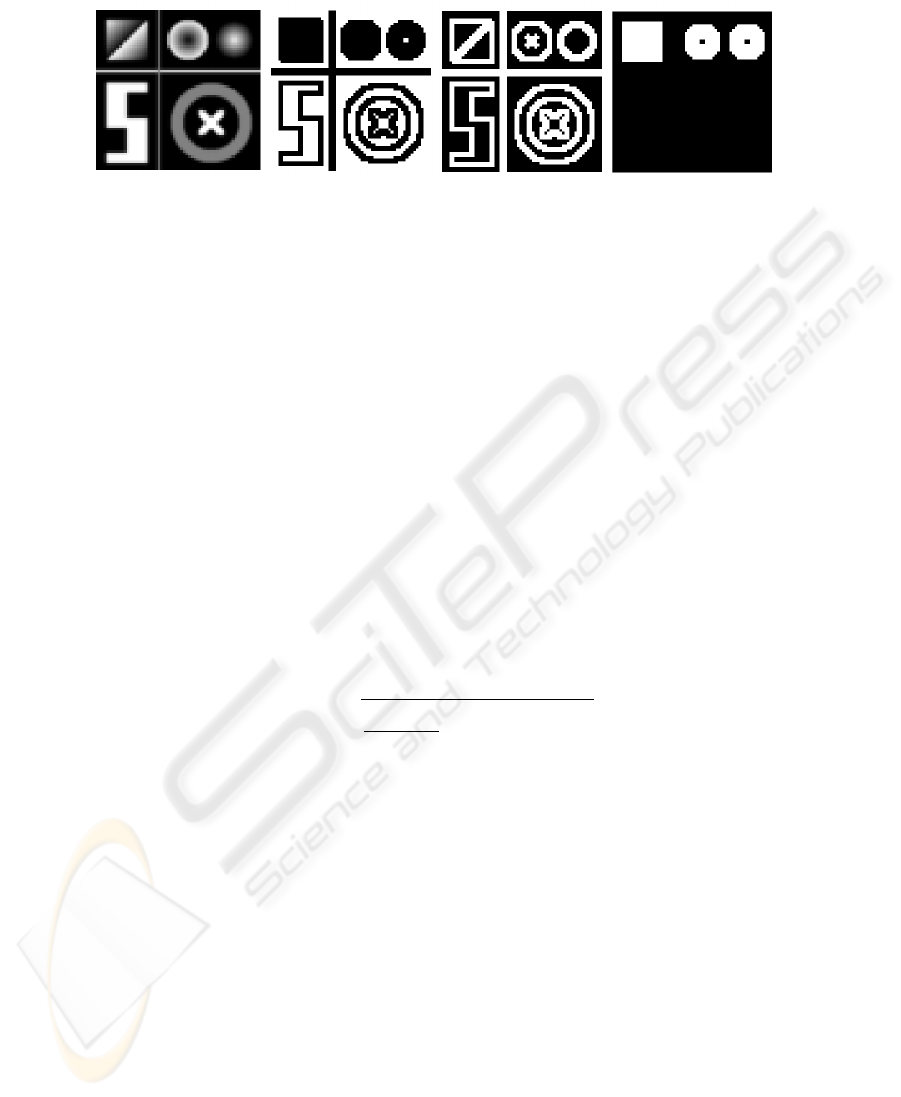
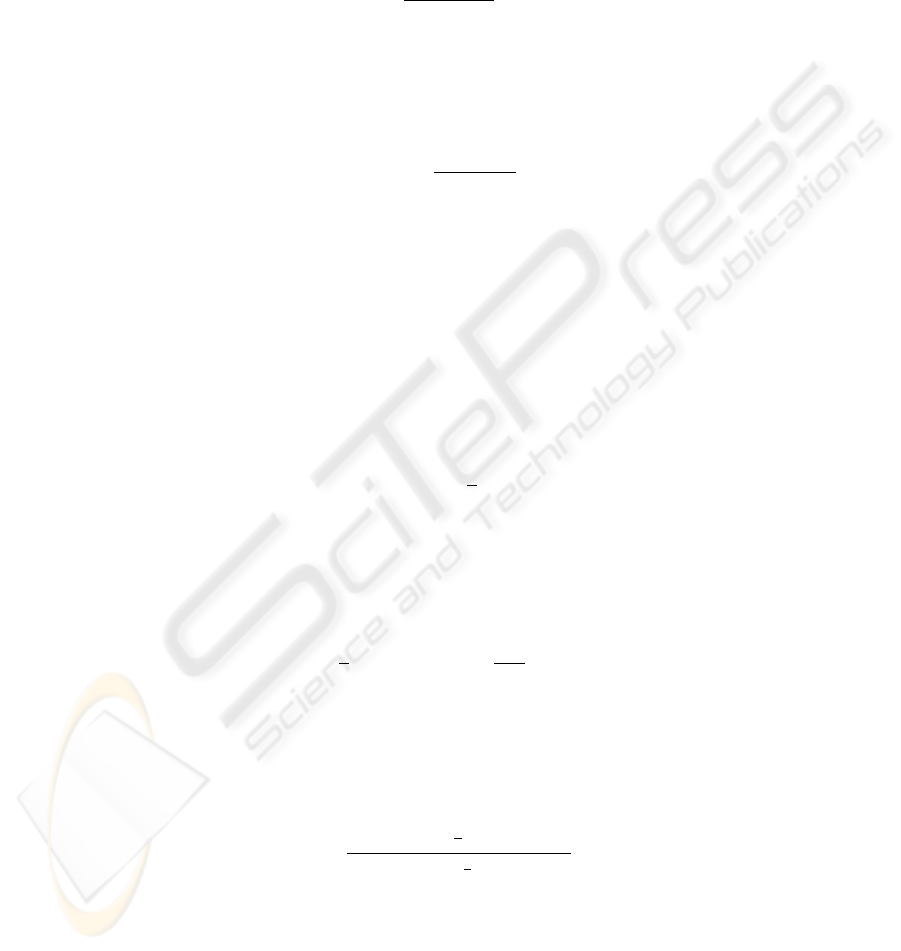
Fig. 1. From left to right: Blurred benchmark image without noise, plateaus mask, edges mask,
ramps mask.
3 Experiments and Results
3.1 Benchmark Image Presentation
Assessing the filtering performances with real-life images such as those acquired on
medical devices is difficult because the ground truth, that is, the noise free image re-
mains unknown. For this reason, the PBBF algorithm has been tested on a 64 × 64
benchmark gray level image. This image consists in a pattern (see Fig. 1, left) which is
a combination of constant plateaus, edges, and gradients. It combines all types of diffi-
cult situations a good filtering algorithm has to cope with. Most medical images present
some or all of these types of difficulties. This pattern is also slightly blurred in order to
avoid sharp edges that would be completely unrealistic. In the blurred image, the edges
between the different areas are smoothed. Eventually, the two-dimensional pattern is
repeated 100 times and stacked so that the final dimension is 64 × 64 × 100. Gaussian
noise is then added to the blurred image.
The denoising performances are evaluated by the RMSE:
RMSE =
s
1
M
∑
N
i=1
ν
i
M
∑
m=1
N
∑
i=1
ν
i
( ˆu
k
i
− u
i
)
2
, (12)
where M is the number of trials and m then trial index. In this equation, the weights
ν
i
either have a value of {0, 1} and are used as masks. These masks are designed to
evaluate the RMSE over the selected areas of the image (whole image, plateaus, edges
or ramps (Fig. 1)). With these masks, the denoising effect can be evaluated specifically
on these areas. More details about the benchmark image, its generation and the perfor-
mances evaluation can be found in [15].
3.2 Experimental Setup and Results
In our implementation of the algorithm, the patches are circular and their size is fixed
to the size of the spatial kernel. Indeed, a patch size smaller than the spatial kernel leads
to a discontinuity in the weights evaluation as the patch would end when the spatial
weights are still non negligible, on the opposite, a spatial kernel smaller than the patch
56

size would mean that the algorithm calculates pixels that would have a 0 weight in the
filtering process. The patches size are then defined by ρ, the width of the spatial kernel.
In the experiment, each 64 × 64 slice of the image is denoised independently (2D
denoising) patches and 2D kernels. The denoising performance on each slice is consid-
ered as the realization of a trial. The quality of the denoising process is measured by the
RMSE for each slice of the image, using the different masks. The results are obtained
on a test image independent from the one used for setting the parameters (it was gener-
ated using the same noise model). The PBBF and PBLMS results are compared to those
of the BF and LMS. For both the PBBF and PBLMS, the patch to patch distance was
defined as the L
2
distance.
The results of the denoising procedures are shown in Table 1. The PBBF outper-
forms both the classical BF and LMS approaches in terms of RMSE and visual ap-
preciation (see Fig. 2). The mechanisms behind theses performances can be explained:
optimal parameters for this filter use narrow radiometric (small σ in equation 6) and
spatial kernels (small ρ in equation 4), but a larger (13) number of iterations, whereas
the BF usually converges to a constant solution after more than 3 iterations.
As the PBBF is more selective than the BF for the computation of the weights, it can
use a higher number of iterations and narrow radiometric and spatial kernels to converge
slowly toward a better filtering result. The PBBF outperforms the other algorithms on
all parts of the image.
The reason why the PBLMS is less performant than the PBBF can be explained too.
After the first iteration, the algorithm computes the distance between the last estimated
image P
k
j
and the observed image P
0
i
. As the filtering effect is applied on the estimated
Fig. 2. Top row: left, original image. Middle, bilateral filtered image. Right, patch-based filtered
image. Bottom row: left, noisy image. Middle, local M-smoother filtered image. Right, patch-
based local M-smoother filtered image.
57
image, those images get more and more different, and the differences add up in the
distance computation until the distance is large enough to eventually be out of the ra-
diometric kernel range and thus reduces the weight to almost zero. The filtering process
is then stopped too early and the image is not filtered anymore after a few iterations.
Fig. 3 shows the residuals of the filtered images. The residuals for the PBBF and
PBLMS filtered image have almost no structure while the BF and LMS ones contain
parts of the original image, it shows that in theses cases, the filtering effect was not
optimal.
Fig. 3. Top row: left, noisy image. Middle, residuals of the bilateral filtered image. Right, residuals
of the patch-based bilateral filtered image. Bottom row: left, noise added to the original image.
Middle, residuals of the local M-smoother filtered image. Right, residuals of the patch-based local
M-smoother filtered image.
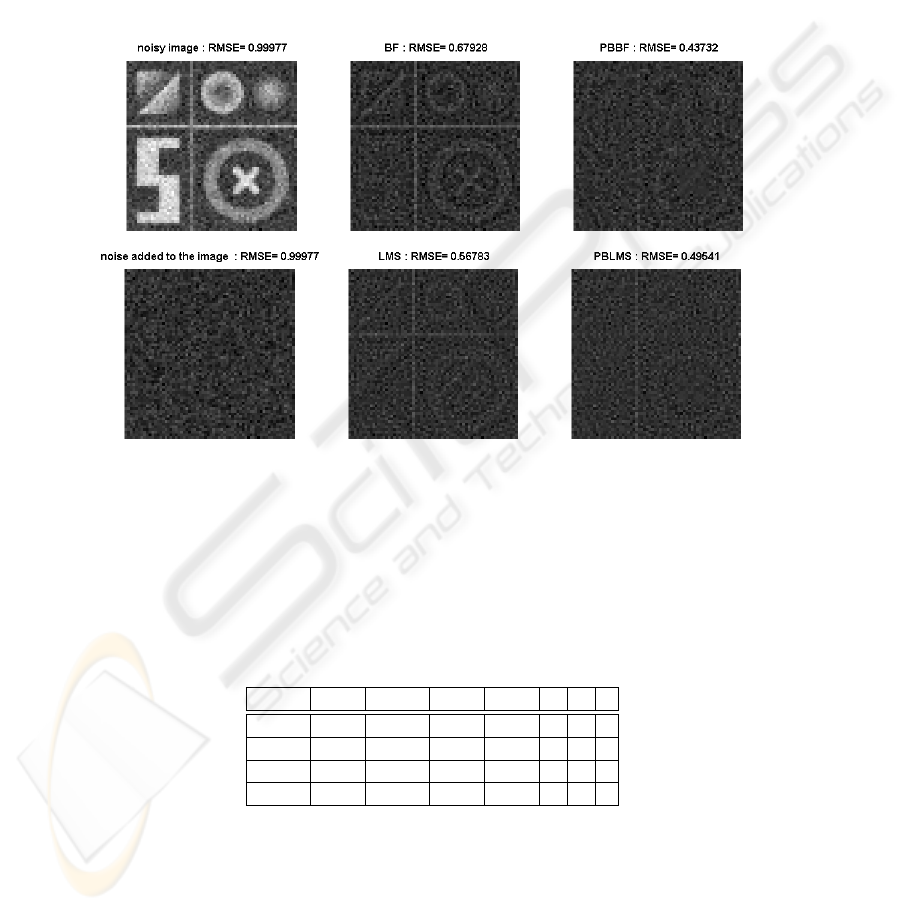
Table 1. Mean RMSE over the 100 test images for the different algorithms and masks (2D). ρ, σ
and n are respectively the width of the spatial kernel, radiometric kernel, and number of iterations
of the filter.
image plateaus edges ramps ρ σ n
PBBF 0.4373 0.2637 0.5941 0.5484 2.1 0.3 15
PBLMS 0.4954 0.3866 0.6272 0.4995 2.8 0.6 5
BF 0.5614 0.4033 0.7464 0.5695 1.9 2.6 2
LMS 0.5678 0.4051 0.7565 0.5491 2.5 2.6 3
These algorithms were tested on 3D images. In this case we generated 100 images
of dimension 64 ×64 × 100 with the same noise model, and used p × p × p patches and
3D kernels. The RMSE is calculated over each one of these 64 × 64 × 100 images for
58
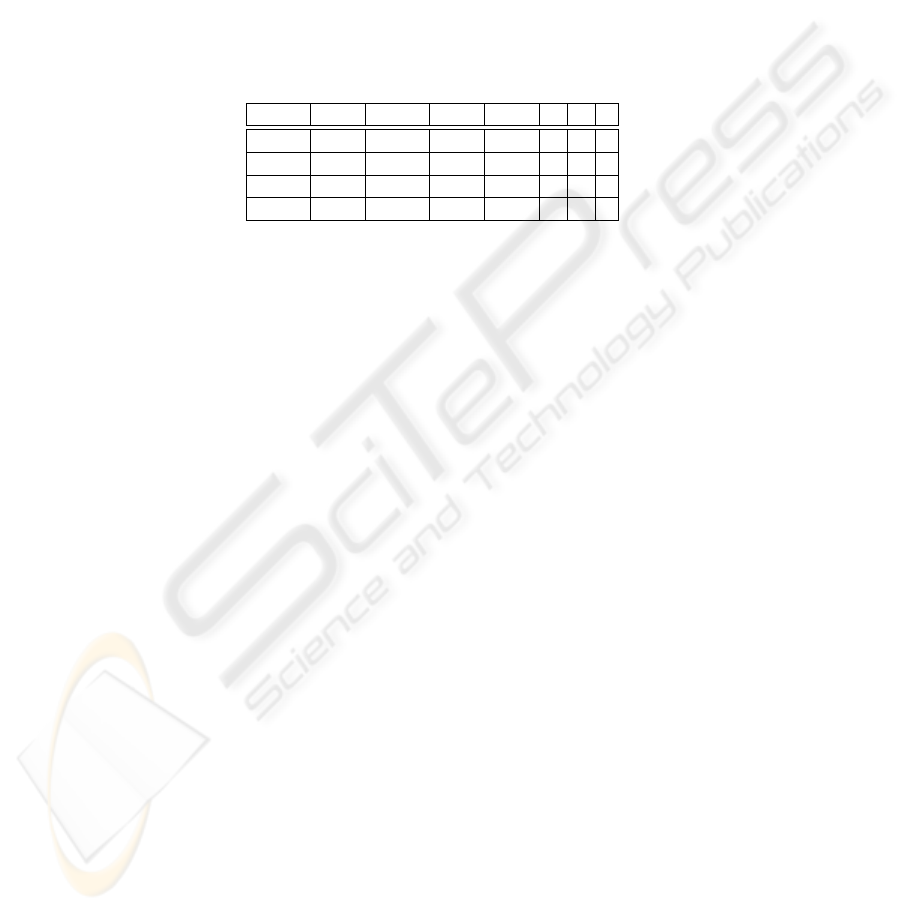
all algorithms. In the 3D case, the performances of all algorithms improve (see Table
2). The PBBF filtering algorithm still gives the best RMSE, on all areas of the image.
Obviously, the benchmark image that was used here is constituted of the same slices
which help the denoising algorithms a lot. However, successive slices are usually highly
correlated in real 3D images, therefore the PBBF may find some useful informations
when a third dimension is added. Further experiments should be done on 3D benchmark
images in order to confirm the filtering gain that we noticed on the 3D denoising.
Table 2. mean RMSE over the 100 test images for the different algorithms and masks (3D). ρ, σ
and n are respectively the width of the spatial kernel, radiometric kernel, and number of iterations
of the filter.
image plateaus edges ramps ρ σ n
PBBF 0.2515 0.1432 0.3348 0.3941 2.1 0.3 13
PBLMS 0.3493 0.2380 0.4721 0.3765 2.8 0.6 5
BF 0.4045 0.2982 0.5290 0.4281 2.1 1.8 2
LMS 0.4228 0.3294 0.5366 0.4387 2.2 2 3
The PBBF algorithm was also compared to the BF on a phantom CT image. A
phantom consists of several cylinders of different densities. As the absorption properties
of the cylinders are known, the images acquired on these phantoms a used to determine
the quantity and distribution of the noise generated in the acquisition process. This
time, the parameters of the filters were fixed empirically as they would have been for a
classical CT image for which no ground truth is available. The quality of the denoising
effect was evaluated from the residuals: the difference between the original and the
denoised image. Figure 4 shows the PBBF and BF denoised images ans their residuals.
From visual evaluation, they seem very close in quality: for both algorithms, there is
no visible blurring induced in the denoising process and the residual noise is located at
the same areas. Still, the residuals from the PBBF algorithm show slightly less structure
than those from the BF algorithm, which shows that the PBBF preserved the edges in a
more efficient way. The PBBF seems to at least compare to the BF on images acquired
with real scanners. More experiments on real medical images will be done in the future.
4 Conclusions
In this paper, we introduced the patch-based bilateral filter and patch-based local M-
smoother. The introduction of patches in the classical bilateral filter and local M -
smoother algorithms is based on the idea that an algorithm using more than one voxel
at a time might be able to be more sensitive to the textures and ramps of the image.
Our experiments shows that the patch-based bilateral filter outperforms the bilateral fil-
ter and local M-smoother algorithms both in terms of RMSE and visual appreciation.
These results also seems promising in the 3D denoising tasks. In the future, we will
adapt this method to more complex noise models (i.e. Poisson or multiplicative noise)
and other patch-to-patch distances functions will be implemented and tested. More per-
formances evaluations of these algorithms will be done on CT-scan or PET-scan images
59
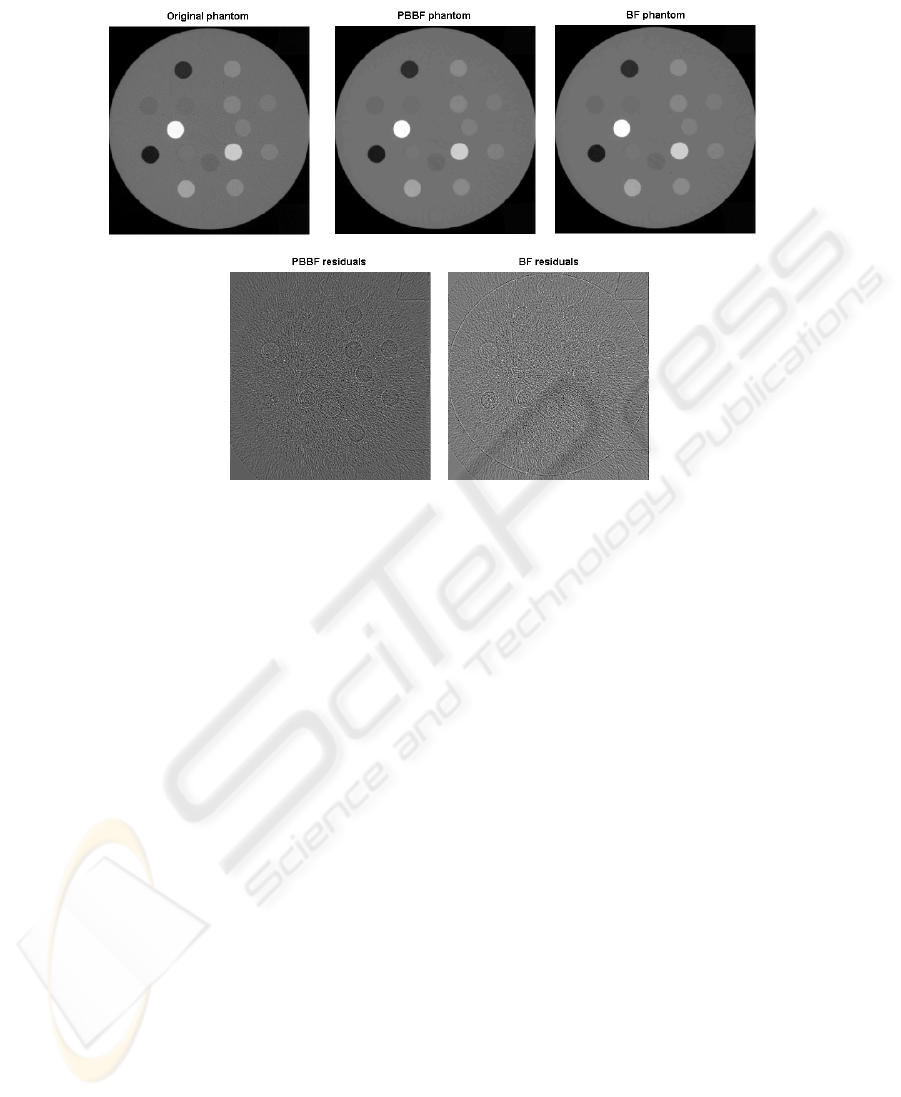
Fig. 4. Top row: left, original phantom image. Middle, PBBF denoised phantom. Right, LMS
denoised image. Bottow row: left, residuals for the PBBF image. Right residuals for the BF
denoised image.
and the results will be assessed by oncologists within the framework of tumor and organ
delineation tasks.
Acknowledgements
A. de Decker is funded by a Belgian F.R.I.A. grant. J.A. Lee is a Postdoctoral Re-
searcher funded by the Belgian National Fund of Scientific Research (FNRS).
References
1. Charnigo, R., Sun, J., Muzic, R.: A semi-local paradigm for wavelet denoising. IEEE Trans
Image Process 15 (2006) 666–677
2. Lin, J.W., Laine, A.F., Bergmann, S.R.: Improving pet-based physiological quantification
through methods of wavelet denoising. IEEE Trans Biomed Eng 48 (2001) 202–212
3. Bruni, V., Piccoliand, B., Vitulano, D.: Wavelets and partial differential equations for image
denoising. Electronic Letters on Computer Vision and Image Analysis 6 (2008) 36–53
4. Osher, S., Burger, M., Donald, G., Jinjun, X., Yin, W.: An iterative regularization method
for total variation-based image restoration. Multiscale Model. Simul. 4 (2005) 460–489
60

5. Sanches, J.M., Nascimento, J.C., Marques, J.S.: An unified framework for bayesian denois-
ing for several medical and biological imaging modalities. Conf Proc IEEE Eng Med Biol
Soc 1 (2007) 6267–6270
6. Takeda, H., Farsiu, S., Milanfar, P.: Kernel regression for image processing and reconstruc-
tion. IEEE Transactions on Image Processing 16 (2007) 349–365
7. Huang, R.H., Wang, X.H.: Image denoising via gradient approximation by upwind scheme.
Signal Processing, 88 (2008) 69–74
8. Mrazek, P., Weickert, J., A., B.: On Robust Estimation and smoothing with Spatial and Tonal
Kernels. In: Geometric Properties for Incomplete data. (2006) 335–352
9. Chu, C., Glad, I., Godtliebsen, F., J.S., M.: Edge-preserving smoothers for image processing.
Journal of the American Statistical Association, 93,no.442 (1998) 526556
10. Elad, M.: On the origin of the bilateral flter and ways to improve it. IEEE Trans. Image
Processing, 11 (2002) 11411151
11. Tomasi, C., Manduchi, R.: Bilateral ltering for gray and color images. In: 6th Int. Conf.
Computer Vision, pp.839846. (1998)
12. Wong, W., Chung, A., Yu, S.: Trilateral filtering for biomedical images. In Chung, A.,
ed.: Proc. IEEE International Symposium on Biomedical Imaging: Nano to Macro. (2004)
820–823 Vol. 1
13. Kervrann, C., Trubuil, A.: An adaptive window approach for poisson noise reduction and
structure preserving in confocal microscopy. In Trubuil, A., ed.: Proc. IEEE International
Symposium on Biomedical Imaging: Nano to Macro. (2004) 788–791 Vol. 1
14. Kervrann, C., Boulanger, J.: Optimal spatial adaptation for patch-based image denoising. ,
15 (2006) 2866–2878
15. Lee, J., Geets, X., Gregoire, V., Bol, A.: Edge-preserving filtering of images with low photon
counts. IEEE Transactions on pattern analysis and machine intelligence, 30 (2008) 1014–
1027
61
