
MEMORY-BASED SPECKLE REDUCING ANISOTROPIC
DIFFUSION
Walid Ibrahim and Mahmoud R. El-Sakka
Computer Science Department, The university of Western Ontario, London, Ontario, N6A-5B7, Canada
Keywords: Diffusion, Anisotropic diffusion, Diffusion reaction, Speckle reduction, Edge detection, Instantaneous
coefficient of variation.
Abstract: Diffusion filters are usually modelled as partial differential equations (PDEs) and used to reduce image
noise without affecting the image main features. However, they have a drawback of broadening object
boundaries and dislocating edges. Such drawbacks limit the ability of diffusion techniques applied to image
processing. Yu and Acton. introduced the speckle reducing anisotropic diffusion (SRAD) to reduce speckle
noise from ultrasound (US) and synthetic aperture radar (SAR) images. Incorporating the instantaneous
coefficient of variation (ICOV) as the diffusion coefficient and edge detector, SRAD gives significantly
enhanced images where most of the speckle noise is reduced. Yet, SRAD still faces the same problem of
ordinary diffusion filters where the boundary broadening and edge dislocation affect its overall
performance. In this paper, we introduce a novel approach to the diffusion filtering process, where a
memory term is introduced as a reaction-diffusion term. By applying our new memory-based diffusion to
SRAD, we significantly reduced the boundary broadening and edge dislocation effect and enhanced the
diffusion process itself. Experimental results showed that the performance of our proposed memory-based
scheme surpass other diffusion filters like normal SRAD and Perona-Malik filter as well as various adaptive
linear de-noising filters.
1 INTRODUCTION
Diffusion has been widely used in image processing
for smoothing and reducing noise. Sharing the
physical properties of the diffusion process and
being modelled as partial differential equation
(PDE), diffusion arises as a powerful tool in various
fields of image enhancement. However, the usual
drawbacks of the diffusion process (e.g., the
broadening of objects boundaries and edges
dislocation) are hindering its applications. Weickert
gave an in-depth analysis of the diffusion process
and its application in image processing(Weickert,
1997).
Perona-Malik introduced one of the earliest
edge-sensitive diffusion filter for additive noise
reduction (Perona and Malik, 1990). Using nonlinear
anisotropic diffusion, the filter greatly reduced the
additive noise, where weighted image gradient is
used as the diffusion coefficient. . For correcting
Perona-Malik feature distortion effect and
preserving edges, a nonlinear edge enhanced
anisotropic diffusion is introduced (Fu et al., 2005).
Yu et. al. introduced the speckle reducing
anisotropic diffusion (SRAD). SRAD (Yu and
Acton, 2002) combined both, the ordinary nonlinear
anisotropic diffusion process proposed by Perona-
Malik, as well as the adaptive speckle multiplicative
noise filters of Lee (Lee, 1980) and Frost (Frost et.
al., 1982). SRAD alleviates the reliance of adaptive
filters of Lee (Lee, 1980) and Frost (Frost et. al.,
1982) on the window size (i.e. mask size) of the
filter.
On contrary to Perona-Malik filter, SRAD uses
instantaneous coefficient of variation (ICOV) (Yu
and Acton, 2004) of the image as the diffusion
coefficient instead of the image gradient. ICOV has
superior edge maps compared to ordinary edge
detectors due to its incorporation as the diffusion
coefficient into SRAD. SRAD enhances the
reduction of speckle noise while ICOV extracts
edges.
However, SRAD suffers from the drawbacks of
ordinray diffusion (boundary broadening and edges
migration). It produces a set of a coarse to fine
images. The features identified at the finer scale are
64
Ibrahim W. and El-Sakka M. (2009).
MEMORY-BASED SPECKLE REDUCING ANISOTROPIC DIFFUSION.
In Proceedings of the First International Conference on Computer Imaging Theory and Applications, pages 64-69
DOI: 10.5220/0001803500640069
Copyright
c
SciTePress

distorted and having dislocated edges. Meanwhile,
features identified at coarse scale are noisy.
Trying to limit SRAD boundary broadening
effect, a more robust diffusion coefficients tensor is
introduced to further stop diffusion across main
edges (Tauber et al., 2004). Acton introduced
deconvolutional SRAD (DeSpeRADo) filter (Acton,
2005), where a deblurring is performed at at the
same time with diffusion. DeSperado showed
significant improved results when applied to
synthesized images. However, the poor estimation of
the point spread function (PSF) of the imaging
device (assumed to cause the boundary broadening
effect) limited its application on real data. Yu et. al.
developed a regularized SRAD (Reg-SRAD) for
enhancing point, linear and regional features (Yu
and Yadegar, 2006). Reg-SRAD required the correct
estimation of a threshold value for bright image
features.
In this paper, we propose memory-based SRAD
(MSRAD) where memory is integrated into the
diffusion process through the reaction term. The
incorporated memory provides feedback between
diffusion stages, reminding the newly diffused
image with the correct edge location found in
previously diffused images. MSRAD will enhance
the diffusion process providing a balance between
diffusion and correct edge localization by maintaing
features’ sizes.
The organization of this paper is as follows; in
Section 2, we first give a brief introduction to the
diffusion process, its physical background and the
Perona-Malik diffusion model. Then, we outline the
original SRAD and ICOV models, and previous
refinements made to them. In Section 3, we
introduce our MSRAD technique. In Section 4, we
outline the results obtained by MSRAD. Finally, In
Section 5, we conclude our work.
2 DIFFUSION FILTERING
Diffusion is a physical process that equilibrates
concentration differences without creating or
destroying mass. One of the well known physical
diffusion equation is Fick’s law (Weickert, 1997)
stating that a concentration gradient causes a flux in
order to compensate for this gradient. A diffusion
tensor (D) governs the relation between
concentration gradient and the produced flux.
In image processing, the concentration gradient
can be expressed as image gradient. A constant
diffusion tensor (D) applied over the whole image
domain causes homogenous diffusion or isotropic
diffusion. In addition, a space-dependant D on the
image domain causes inhomogeneous (anisotropic)
diffusion. Linear diffusion happens when D is a
function of the differential structure (image gradient)
of the original image, while non-linear diffusion has
the diffusivity matrix D dependant on the
successively diffused image differential structure
(Weickert, 1997).
Throughout this proposal, the notation used for
diffusion time is t, where a time dependent variable
will have t as its superscript. I indicates the original
image, u refers to the diffused image, u
t
indicates the
diffused image at time t, where u
t=0
is the original
image I. The subscript x is used to represent the
pixel coordinates (i,j) of the image in the Cartesian
domain, and it is assumed to exist wherever I or u
terms are used.
The general diffusion equation is given by
(1),
where div is the divergence operator, D is the
diffusivity tensor, u is the diffused image,
V
u is the
image gradient. Changing the diffusivity tensor
defines the kind of diffusion applied to the image
whether linear, nonlinear, isotropic, or anisotropic.
The Perona-Malik model uses a rapidly
decreasing diffusivities D as shown in (2),
where λ is the edge magnitude parameter, D is a
function that gives low values (near zero) for
gradient values >> λ inhibiting diffusion near edges
(Perona and Malik, 1990). Using (2) as the
diffusivity coefficient of (1), the model sharpens
edges if their gradient is larger than the edge
magnitude parameter λ by inhibiting diffusion. For
gradient values << λ, D approaches one and isotropic
diffusion smoothes homogenous regions of the
image converging equation (2) to a linear
homogenous diffusion similar. The correct choice of
λ greatly affects the filter operation. As for large
values of λ, D will be always close to one
independent on the gradient value. While for smaller
values of λ, D will be nearly equal to zero inhibiting
diffusion.
)(
t
t
uDdiv
t
u
∇×=
∂
∂
,
(1)
),0(
1
1
)(
2
≠
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∇
+
=∇=
λ
λ
t
t
u
ugD
(2)
MEMORY-BASED SPECKLE REDUCING ANISOTROPIC DIFFUSION
65

2.1 Instantaneous Coefficient of
Variation (ICOV)
Yu and Acton (2002) (2004) introduced ICOV as the
edge detector operator. ICOV operator is given by
(3),
where |.| is the absolute operator, ||.|| is the
magnitude operator,V is the gradient operator,V
2
is
the Laplacian operator, δ, ω, and, χ are weighting
parameters responsible for sharpening edge response
and reduce edge position bias. They are usually
taken to be equal 1/2, 1/16 and, 1/4, respectively.
ICOV is an edge detector utilizing the
normalized gradient and Laplacian operators. It
optimizes edge detection in speckle imagery through
decreasing the probability of false edge detection
and improving the edge localization accuracy.
2.2 Speckle Reducing Anisotropic
Diffusion (SRAD)
Yu et. al. incorporated Lee (Lee, 1980) and Frost
(Frost et. al., 1982) filters along with the anisotropic
diffusion filter of Perona-Malik to come up with a
novel speckle de-noising partial differential equation
called speckle reducing anisotropic diffusion
(SRAD) filter (Yu and Acton, 2002). SRAD is given
by (4),
where, t is diffusion time index where u
t=0
is the
original image I. ∆t is the time step (usually taken in
the range from 0.05 to 0.25) and it is responsible for
the convergence rate of the diffusion process, g(.) is
the diffusion tensor function and is given by (5),
P is a function in the ICOV of the diffused image as
shown in (6),
where q
t
is the measure of speckle coefficient of
variation in a homogenous region of the image.
ICOV serves as the edge detector for the
diffusion process. It gives high response at edges
and low response in homogenous regions. q
t
weights
the amount of diffusion applied by SRAD to the
image similar to λ in (2). For simplicity, the form in
(7) is used for D,
The behaviour of SRAD allows diffusion in the
direction parallel to the edge. Negative diffusion is
allowed in the direction normal to the edge. SRAD
outperforms normal anisotropic diffusion filters by
enhancing edge strength and reducing speckle noise
along image contours. However, SRAD still suffers
from ordinary diffusion drawbacks distorting the
size of image features with the increase of diffusion.
In the following section, we introduced our
modification to SRAD to lower its smoothing effect.
3 MEMORY-BASED SPECKLE
REDUCING ANISOTROPIC
DIFFUSION (MSRAD)
SRAD efficiently reduces speckle noise from
images, where the incorporation of ICOV as the
diffusion coefficient provides clear edge maps.
Memory-based SRAD provides features tracking
feedback between the generated set of images
through diffusion varying from coarse to fine scale.
At the beginning of the diffusion process, the coarse
images produce noisy edge maps and provide
correctly located edges, as the effect of feature
broadening is not yet severe. As the diffusion
proceeds with time, the finer images are smoother
and generate more enhanced, highly connected edge
maps but they suffer from dislocated edges due to
feature broadening.
MSRAD introduced memory reminds each
diffused image with the correct edge location and
feature size from previously diffused images.
MSRAD enhance the diffusion process providing
memory feedback balancing diffusion (smoothing),
edge localization, and, feature allocation throughout
different diffusion stages.
MSRAD equation is given in 0,
)(
)(
)(
2
22
2
tt
tt
t
uu
uu
uICOV
∇×+
∇×−∇×
=
χ
ωδ
(3)
],))(([
)(
tt
ttt
uuICOVgdiv
uuSRAD
∇×=
=
Δ+
(4)
)(
))((
Pt
euICOVgD
−
==
,
(5)
()
2
2
1
1
)(
t
t
t
q
q
uICOV
P
+
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
,
(6)
P
uICOVgD
t
+
==
1
1
))((
,
(7)
0),()1(
)(
),(
,
1
01
0
>×−+×=
=
=
=
+
tuSRADu
uuMSRAD
uSRADu
Iu
tt
tt
αα
(
8)
IMAGAPP 2009 - International Conference on Imaging Theory and Applications
66

where α is a weighting parameter. Comparing 0 to
memory-less SRAD in (4), MSRAD incorporates the
weighted average of the currently diffused image
with the set of the previously generated diffused
images. It requires the determination of a single
weighting parameter α.
The proper choice of α favours either more
diffusion or more adhering to image features. The
original and successively the coarse images exhibit
correct edge locations and feature sizes. As diffusion
proceeds with time towards the finer set of images α
provides coupling between the fine and coarse
images. We empirically choose α to be in the range
from 0.15 to 0.85 depending on the amount of
diffusion needed
.
3.1 MSRAD as Diffusion-Reaction
Term
Reformulating MSRAD as a diffusion-reaction term
0 can be rewritten as 0,
where MSRAD resembles the diffusion-reaction
model (Weickert, 1997). Memory-less SRAD and
consequently ICOV extracted edge maps are highly
sensitive to the time step ∆t determining SRAD rate
of convergence (stopping criteria). MSRAD
alleviate this reliance by incorporating memory to
the diffusion process through the reaction term as
shown in 0.
3.2 MSRAD versus DeSpeRADo and
Reg-SRAD
MSRAD along with DeSpeRADo (Acton, 2005) and
Reg-SRAD (Yu and Yadegar, 2006) tackled the
problem of feature broadening and edge dislocation
exhibited by normal SRAD.
DeSpeRADo required the exact estimation of the
PSF of the imaging device assumed to cause speckle
noise. This estimation makes the real utilization of
DeSpeRADo impractical and dependant on the
imaging device.
Reg-SRAD depends on the determination of a
threshold value along with other two weighting
parameters. The threshold value depends on the
bright regions intensity of the image. Thus, the
correct choice of the threshold value is highly
dependant on the processed image.
MSRAD requires only the determination of a
single weighting parameter. This parameter is
independent neither of the imaging device used nor
of the image features’ intensities. Thus, MSRAD
provides more convenient and easy to determine
weighting parameter providing balance between
diffusion and features perseverance. The lack of
code and/or test data for both DeSpeRADo and Reg-
SRAD limited our ability to compare our results
with theirs. However, in Section 4 we give a
thoroughly measure of MSRAD performance.
4 RESULTS
In this section, the performance of MSRAD is
compared to adaptive linear noise reduction filters of
Lee (Lee, 1980), Frost (Frost et. al., 1982), and,
Weiner (Wiener, 1976). Also, MSRAD is compared
to the diffusion filters of Perona-Malik and normal
SRAD. The evaluation will be made in terms of
feature perseverance and noise reduction.
For evaluating the MSRAD performance, we
generated a synthesized image shown in Figure 1(a).
The synthesized image is of 150 column width and
150 column height. It consists of a unit step function
in the range from column 15 to column 65 and a
ramp function from column 85 to column 135. A
speckled version of the synthesized image is shown
in Figure 1(b), where a Gaussian distributed speckle
noise of zero mean and variance of 0.1 is added.
In terms of noise reduction and feature
perseverance, Figure 1(c), (d), (e), and (f) shows the
results of de-noising the synthesized speckled image
shown in Figure 1(b) by Lee, Frost, Wiener, and
Perona-Malik filters, respectively. The results where
obtained using 3×3 window for Lee and Frost filters
and 5×5 for Weiner filter. For Perona-Malik filter
the edge magnitude parameter λ, was taken equal to
0.03, with a time step ∆t = 0.1. MSRAD, SRAD,
and, Perona-Malik results were obtained after 200
iterations, where SRAD result is shown in Figure
1(g), and MSRAD result shown in Figure 1(h). Both
MSRAD and SRAD results were obtained using a
time step ∆t = 0.25.
Compared to adaptive linear filters (i.e. Frost,
Lee, Wiener) and Perona-Malik filter, MRSAD
showed superior noise reduction effect. Original
SRAD suffer from boundary broadening and
distortion of features. MSRAD result showed
significant perseverance of the features’ sizes.
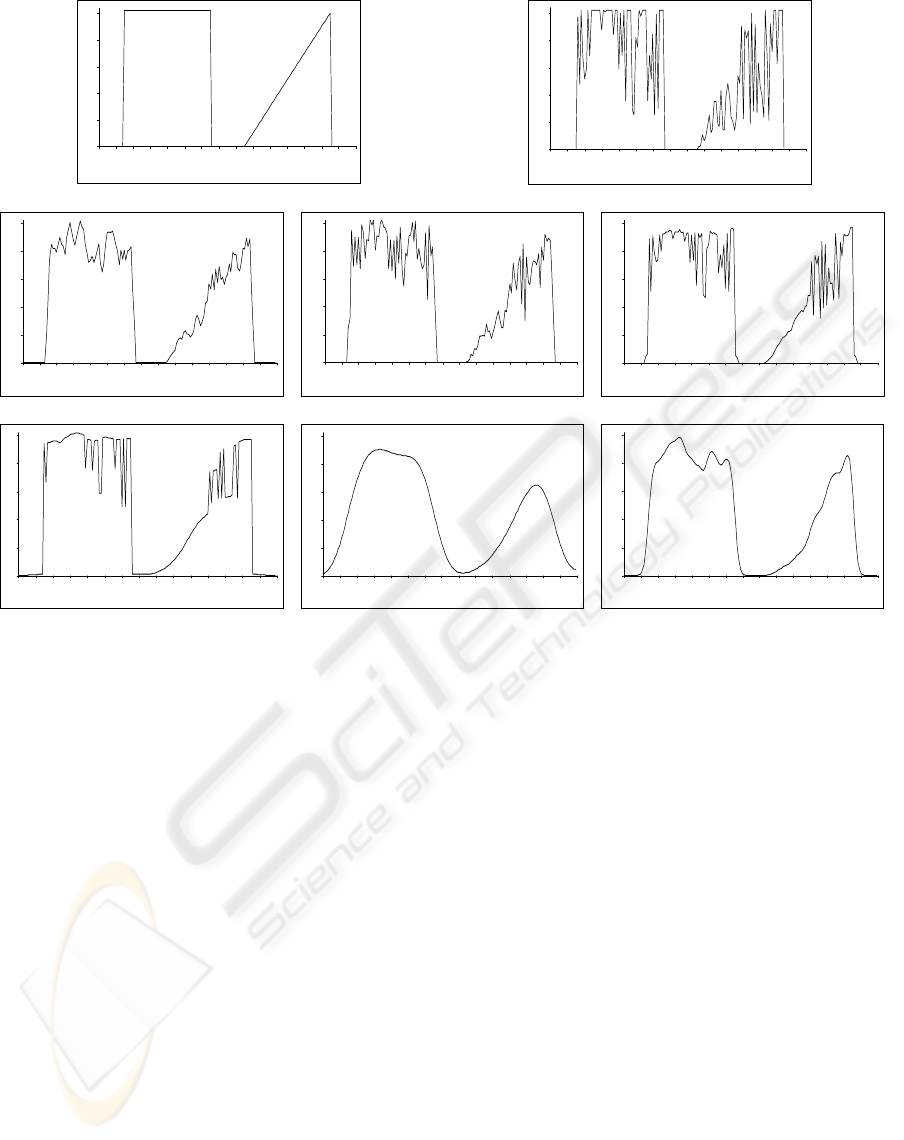
Figure 2 inspects the results of applying Lee,
Frost, Wiener, Perona-Malik, SRAD, and MSRAD
over a horizontal scan line extracted from the images
at row 71 in Figure 1. The results show that MSRAD
virtually approximated the original signal shown in
0)),(()(
)(
1
>−×+=
=
+
tuSRADuuSRAD
uuMSRAD
ttt
tt
α
(9)
MEMORY-BASED SPECKLE REDUCING ANISOTROPIC DIFFUSION
67
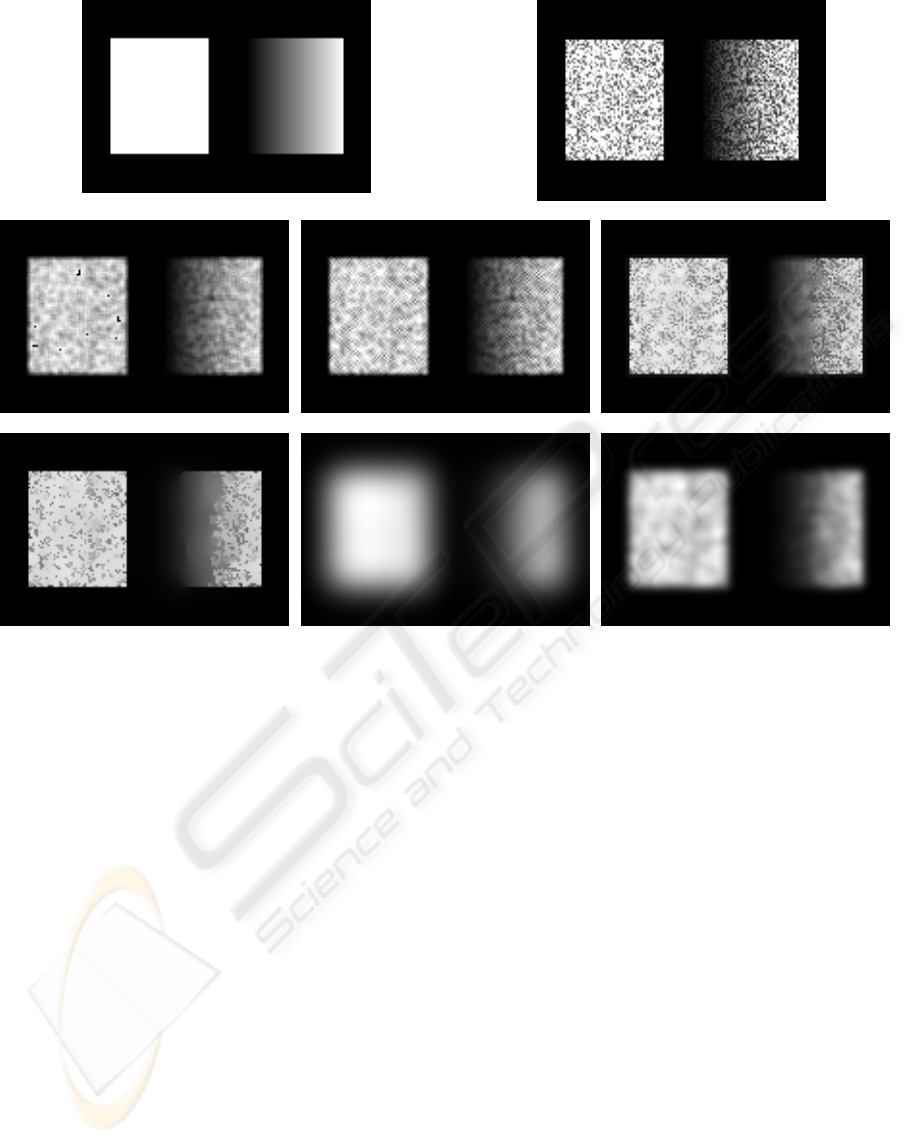
Figure 2(a). Lee, Frost, Wiener and, Perona-Malik
filters have limited noise reducing responses. Yet,
they do not suffer from feature broadening effects.
While SRAD suffer from severe boundary
broadening and feature merging effect. MSRAD
shows more consistent features along with good
approximation of original signal.
The adaptive linear filters of Lee, Frost, Weiner
depend totally on the window (mask) size. Perona-
Malik filter depends on the edge magnitude
parameter λ, while SRAD depends on the diffusion
step ∆t. MSRAD depends only on a single weighting
parameter, α, maintaining a good balance between
image smoothing and boundary allocation.
5 CONCLUSIONS
In this paper, memory-based SRAD was introduced
as feature perseverance SRAD. The introduced
memory through the reaction term balanced the
effect of diffusion and correct boundaries allocation.
MSRAD showed significant noise reduction effect
over linear filters of Lee, Frost, and, Wiener, as well
as over the diffusion filter of Perona-Malik.
Compared to the original SRAD, MSRAD
maintained the correct sizes of features and reduced
speckle noise. MSRAD requires the determination of
a single weighting parameter compared to estimating
PSF of DEspeRADo or the image dependant
threshold parameter controlling Reg-SRAD.
ACKNOWLEDGEMENTS
This research is partially funded by the National
Sciences and Engineering Research Council of
Canada (NSERC). This support is greatly
appreciated.
(a) (b)
(c) (d) (e)
(f) (g) (h)
Figure 1: Synthesized image along with the results of applying various de-noising filters and MSRAD. (a) Original
synthesized image. (b) Speckled synthesized image. (c) Lee filter result (d) Frost filter result. (e) Wiener filter result (f)
Perona-Malik filter result. (g) SRAD result (h) MSRAD result.
IMAGAPP 2009 - International Conference on Imaging Theory and Applications
68
REFERENCES
Acton, S., 2005. Deconvolutional speckle reducing
anisotropic diffusion. In Image Processing, IEEE
International Conference. pp. I-5-8.
Frost, V., Stiles, J., Shanmugan, K., Holtzman, J., 1982. A
model for radar images and its application to adaptive
digital filtering of multiplicative noise. In Pattern
Analysis and Machine Intelligence, IEEE
Transactions. PAMI-4, pp. 157–165.
Lee, J., 1980. Digital image enhancement and noise
filtering by use of local statistics. In Pattern Analysis
and Machine Intelligence, IEEE Transactions. PAM1-
2(2), pp. 165-168.
Perona, P., Malik, J., 1990. Scale-space and edge detection
using anisotropic diffusion. In Pattern Analysis and
Machine Intelligence, IEEE Transactions. 12(7), pp.
629-639.
Shujun Fu, Qiuqi Ruan, Wenqia Wang, Yu Li. 2005. A
compound anisotropic diffusion for ultrasonic image
denoising and edge enhancement. In Circuits and
Systems, 2005. ISCAS 2005. IEEE International
Symposium on. pp. 2779-2782 Vol. 3.
Tauber, C., Batatia, H., Ayache, A., 2004. A robust
speckle reducing anisotropic diffusion. In Image
Processing, 2004. ICIP '04. 2004 International
Conference on. pp. 247-250 Vol. 1.
Weickert, J., 1997. A Review of Nonlinear Diffusion
Filtering. In Proceedings of the First International
Conference on Scale-Space Theory in Computer
Vision. Springer-Verlag, pp. 3-28.
Wiener, N., 1976. Norbert Wiener: Collected Works, P.
Masani, Ed., MIT Press, Cambridge.
Yongjian, Yu, Acton, S., 2002. Speckle reducing
anisotropic diffusion. In Image Processing, IEEE
Transactions. 11(11), pp. 1260-1270.
Yongjian, Yu, Acton, S., 2004. Edge detection in
ultrasound imagery using the instantaneous coefficient
of variation. In Image Processing, IEEE Transactions.
13(12), 1640-1655.
Yongjian, Yu, Yadegar, J., 2006. Regularized Speckle
Reducing Anisotropic Diffusion for Feature
Characterization. In Image Processing, IEEE
International Conference. pp. 1577-1580.
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In te n is t
y
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In te n ist
y
(a) (b)
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In ten ist
y
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In ten ist
y
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In ten is t
y
(c) (d) (e)
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In te n is t
y
0
50
100
150
200
250
0 102030405060708090100110120130140150
x- coordinate
In ten is t
y
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
x- coordinate
In ten is t
y
(f) (g) (h)
Figure 2: MSRAD versus various de-noising filters in terms of smoothing over a horizontal scan line of the images in
Figure 1. (a) Original signal. (b) Speckled signal. (c) Lee filter signal result. (d) Frost filter signal result. (e) Wiener filter
signal result. (f) Perona-Malik signal result. (g) SRAD result signal. (h) MSRAD signal result.
MEMORY-BASED SPECKLE REDUCING ANISOTROPIC DIFFUSION
69
