
ROBUST NUMBER PLATE RECOGNITION IN IMAGE
SEQUENCES
Andreas Zweng and Martin Kampel
Institute of Computer Aided Automation, Vienna University of Technology, Pattern Recognition and Image Processing
Group, Favoritenstr. 9/1832, A-1040 Vienna, Austria
Keywords: License Plate Localization, License Plate Recognition, Character Classification, Character Segmentation,
Image Sequences, Blob Analysis.
Abstract: License plate detection is done in three steps. The localization of the plate, the segmentation of the
characters and the classification of the characters are the main steps to classify a license plate. Different
algorithms for each of these steps are used depending on the area of usage. Corner detection or edge
projection is used to localize the plate. Different algorithms are also available for character segmentation
and character classification. A license plate is classified once for each car in images and in video streams,
therefore it can happen that the single picture of the car is taken under bad lighting conditions or other bad
conditions. In order to improve the recognition rate, it is not necessary to enhance character training or
improve the localization and segmentation of the characters. In case of image sequences, temporal
information of the existing license plate in consecutive frames can be used for statistical analysis to improve
the recognition rate. In this paper an existing approach for a single classification of license plates and a new
approach of license plate recognition in image sequences are presented. The motivation of using the
information in image sequences and therefore classify one car multiple times is to have a more robust and
converging classification where wrong single classifications can be suppressed.
1 INTRODUCTION
Automatic license plate recognition is used for
traffic monitoring, parking garage monitoring,
detection of stolen cars or any other application
where license plates have to be identified. Usually
the classification of the license plates is done once,
where the images are grabbed from a digital network
camera or an analog camera. The resolution of the
license plates has to be very high in order to
correctly classify the characters. Typically
localization of the license plate is the critical
problem in the license plate detection process. For
localization, candidate finding is used in order to
find the region mostly related to a license plate
region. If the license plate is not localized correctly
for any reason (e.g. traffic signs are located in the
background), there is no other chance to detect the
license plate when taking only one frame into
consideration.
In this paper we propose an approach of
automatic license plate detection in video streams
when taking consecutive frames into consideration
for a statistical analysis of the classified plates in the
previous frames. The idea is to use standard methods
for the classification part and use the classification
of as many frames as possible to exclude
classifications where the wrong region instead of the
license plate region was found or the classification
of the characters was wrong due to heavily
illuminated license plates, partly occluded regions or
polluted plates. The algorithm has to perform with at
least 10 frames per second if the car is visible only
for some seconds to retrieve enough classifications
for the statistical analysis. To reduce the amount of
computation, grayscale images are computed from
the input images where it is also not necessary to
keep the information of all three color channels for
our approach.
The remainder of this paper is organized as
follows: In section 2, related work is presented, in
section 3 the methodology is reviewed (plate
localization, character classification and the
classification of the plate). In section 4 experimental
results are shown and section 5 concludes this paper.
Our approach has the following achievements:
56
Zweng A. (2009).
ROBUST NUMBER PLATE RECOGNITION IN IMAGE SEQUENCES.
In Proceedings of the First International Conference on Computer Imaging Theory and Applications, pages 56-63
DOI: 10.5220/0001801200560063
Copyright
c
SciTePress

• High improvement of existing approaches
• Real time classification in image sequences
• Converging progress of classification
2 RELATED WORK
Typically license plate recognition starts by finding
the area of the plate. Due to rich corners of license
plates Zhong Qin et.al. (2006) uses corner
information to detect the location of the plate.
Drawbacks of this approach are that the accuracy of
the corner detection is responsible for the accuracy
of the plate localization and the detection depends
on manual set parameters. Xiao-Feng et al. (2008)
use edge projection to localize the plate which has
drawbacks when the background is complex and has
rich edges. For character segmentation Xiao-Feng et
al. (2008) made use of vertical edges to detect the
separations of characters in the license plate where
Feng Yang et.al. (2006) use region growing to detect
blobs with a given set of seed points. The main
problem of this approach is, that the seed points are
chosen by taking the maximum gray-values of the
image which can lead to skipped characters due to
the fact that no pixel in the characters blob has the
maximum value. For character classification, neural
networks are used (Anagnostopoulos et al., 2006;
Peura and Iivarinen, 1997). Decision trees can also
be used to classify characters where each decision
stage splits the character set into subsets. In case of a
binary decision tree, each character-set is divided
into two subsets.
3 METHODOLOGY
The methodology is divided into three main points.
The license plate localization algorithms which finds
the region of the plate, the character segmentation
which extracts the digits on the plate and the license
plate classification which classifies the extracted
blobs. The license plate classification is separated in
three steps, namely the single classification, which is
done in each frame, the temporal classification
which uses the single classifications and is also done
in each frame and the final classification which uses
the temporal classifications and is done once per
license plate at a triggered moment (e.g.: after 20
classifications; when the plate is not visible
anymore). The algorithms in this paper are
summarized in the graph shown in fig. 1.
Figure 1: Summary of algorithms.
3.1 License Plate Localization
In video streams license plates are not present in all
frames so the first part of the localization is to detect
whether a license plate is present or not. Edge
projection is used to find plate candidates, which is
described in section 3.1.1. To detect if a plate is
located in the region of interest in the image, the
highest edge projection value is stored for the past
frames. In our approach the past 1500 frames are
taken to compute the edge projection mean value. If
the highest edge projection value in the actual frame
is 10% higher than the mean value, further
computation in license plate detection is done,
otherwise the frame is rejected.
3.1.1 Localization of License Plates
License plates usually have high contrast due to the
characters in the plate region. This property can be
used to detect license plates localization. The
localization process is done in three steps. The first
step is to detect vertical positions of possible license
plates by projecting vertical edges onto the vertical
axis. The second step is to detect the horizontal
boundaries of the license plate by projecting
horizontal edges onto the horizontal axis (Martinsky,
2005).
P
y
is the horizontal edge projection of line y and
P
x
is the vertical edge projection of column x.
Regions of license plates produce a high edge
ROBUST NUMBER PLATE RECOGNITION IN IMAGE SEQUENCES
57

projection at their position, so the highest peaks of
the edge projections are the best candidates for
license plates. Sometimes other regions like the
regions of traffic signs or the cars grille produce
even higher projections at their positions than
license plates. An approach to suppress such objects,
is to find a certain amount of license plate candidates
and discard candidates which do not satisfy the
license plate properties (e.g. characters are in the
license plate or the regions width-to-height relation
is higher than 1, usually about 4.5 to 5). Edge
projection is affected by noise, so horizontal and
vertical median filtering is done before edge
detection. The horizontal median filter usually has
more columns than rows and vice versa for the
vertical median filter. We have used a horizontal
median filter of size 20 by 1 and a vertical median
filter of 1 by 20 pixel. For edge detection, the Sobel
Kernel was used to detect edges in horizontal and
vertical detection separately. Horizontal and vertical
median filtering results can be seen in fig. 2 and
horizontal edge detection results are shown in fig. 3.
Figure 2: Horizontal and vertical median filtering.
Figure 3: Result of horizontal edge detection on a median
filtered image.
3.1.2 Band Clipping and Plate Clipping
The clipping of the top and bottom boundaries of the
license plate is called band clipping and the clipping
of the left and right boundaries is called plate
clipping (Martinsky, 2005). In order to find the best
candidates, the highest peaks of the projections have
to be found which is computed as follows:
Where P
y
is the resulting histogram of the horizontal
projection and Hy
max
is the maximum value of this
histogram. To be able to find the boundaries of the
plate, the histogram has to be iterated from the
position of the maximum value in both directions
until the histogram value reaches a value which is
lower than Hy
max
multiplied by a factor which is the
threshold value usually chosen as 0.42. This value
was chosen by experimental observation of the
results. This value turns out to be the best value for
the given image quality and compression which
sparsely influence the edge projection. Equation 4
and 5 describe the computation of these boundaries
where H
y0
is the lower boundary and H
y1
is the upper
boundary of the license plate, c
y
is the threshold
value and P
y
is the histogram (Martinsky, 2005). y
0
and y
1
denote the image-height limitations (y
0
=0,
y
1
=image-height) A possible result of this process is
illustrated in fig. 4.
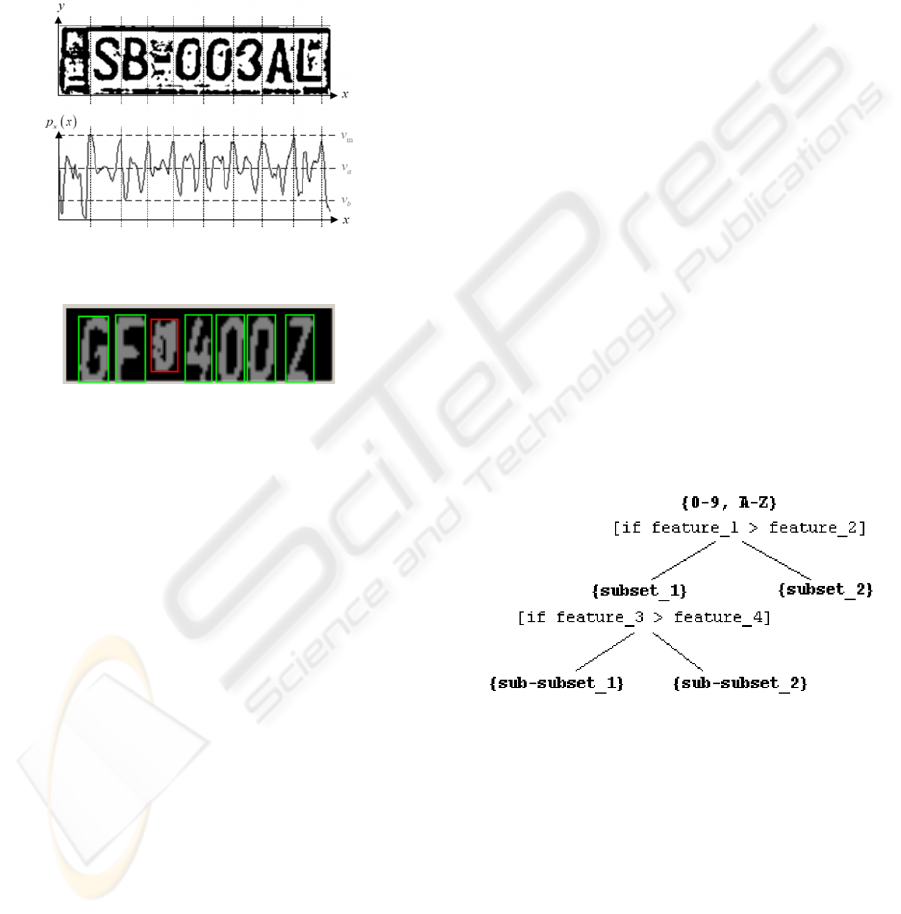
Figure 4: Boundary detection of the edge projections.
Equivalent calculations are done when
calculating the right and left boundaries where the
edge values are only taken from the clipped
boundaries of the previous found horizontal band
(Martinsky, 2005).
3.1.3 License Plate Candidates
The candidate region found by taking the highest
peak of the edge projection is not necessarily the
region of the real license plate. The lights of a car
and the cars grille also produce high edge projection
values, so these candidates have to be rejected and
other peaks have to be analyzed. Our experience was
that three candidates for the horizontal projection
and three candidates for the vertical projection (for
each of the three horizontal projections) are enough
to find the real license plate. In fig. 5, the edge
IMAGAPP 2009 - International Conference on Imaging Theory and Applications
58
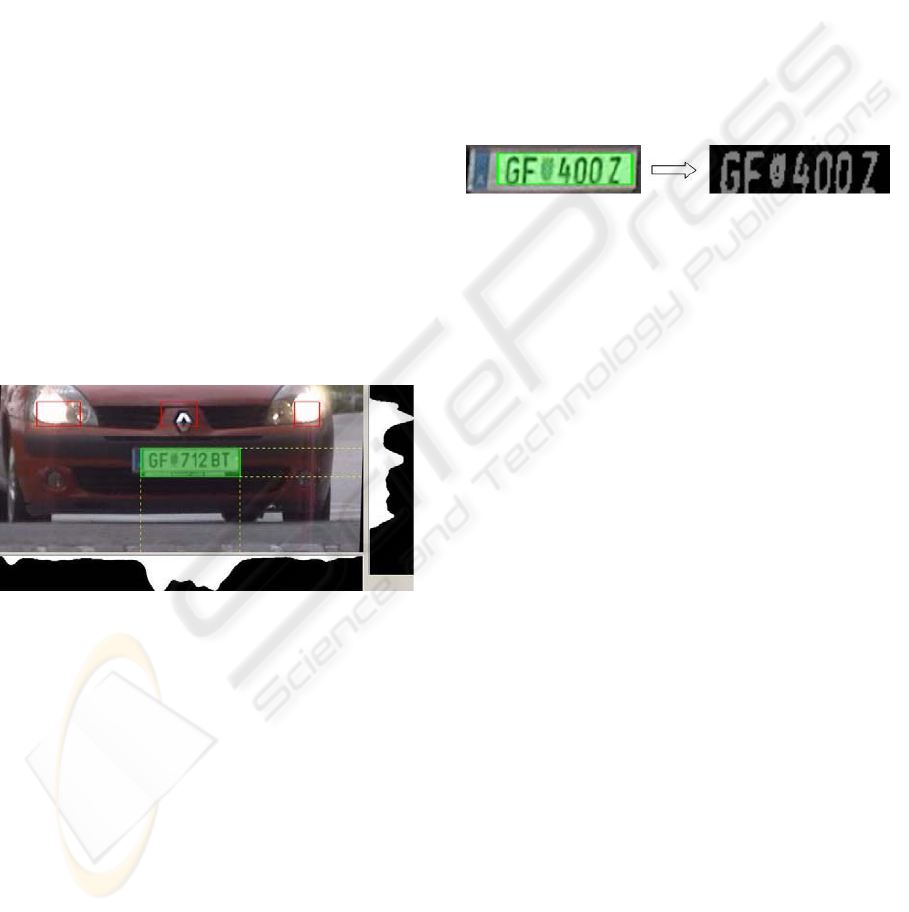
projection at the position of the light is higher than
the projection of the plate. This is the reason why the
regions at the lights are detected as candidates (red
rectangles). After analyzing the regions, no
information of a license plate could be found, so the
three best candidates are rejected and the plate was
found at the second highest projection of the
horizontal edge histogram. The algorithm for finding
the license plate can be described as follows:
FOR i = 1 to 3
FOR j = 1 to 3
Find top and bottom limits
Find left and right limits
IF region is a license plate
FOUND = true
BREAK
ELSE
reject region
continue
ENDIF
ENDFOR
ENDFOR
IF FOUND == true
further classification
ELSE
reject frame
ENDIF
Figure 5: Candidate finding and rejection.
3.2 Character Segmentation
Before the license plate can be classified, each
character has to be extracted and classified
separately. There are several possibilities to extract
the characters like blob analysis or segmentation
using the vertical edge projection. We used blob
analysis because the information of the blobs can be
used for candidate selection. To reduce the
complexity, the license plate region is converted into
a binary image. In order to detect connected
components (blobs) in the region, binarization of the
plate region has to be done to reduce the complexity.
After the binarization, the license plate is segmented
into foreground and background, where the
foreground are the characters and the background is
the plate itself. A threshold value is calculated using
the algorithms in (Ridler and Calvard, 1987). For
local non-uniform illumination conditions, the
algorithm in (Rae Lee, 2002) should be used.
The threshold is then used for the whole plate
region. This can lead to problems when the plate is
more illuminated in some regions than in others or
the plate is polluted in some regions. To solve that
problem the approach of Chow und Kaneko is used
which separates the region into sub-regions (e.g. 2
by 2 or 3 by 2 etc.), calculates the threshold for each
sub-region as described in the steps above and the
threshold for pixels between sub-regions are
interpolated using the weight of all neighboring
subregions. The result of this process is illustrated in
fig. 6.
Figure 6: Binarization of the license plate.
3.2.1 Segmentation using the Vertical Edge
Projection
This approach takes the vertical edge projection of
the plate region which is calculated in the
localization process and computes the first
derivative of the histogram to find black to white
and white to black changes (Martinsky, 2005; Zhang
Y., Zhang C., 2003). From the resulting histogram,
the highest peaks are at the positions of the character
separations. The algorithm takes the highest peak
and separates the plate into two subregions at this
position. For each sub-region, the highest peak is
taken and the plate is separated again. This process
is done until the region reach a certain width or the
peaks are to low compared to the highest value of
the whole histogram. A possible result can be seen
in fig. 7. For each sub-region, noise is removed and
the character blobs are extracted for further
classification.
3.2.2 Segmentation using Blob Analysis
Feng Yang et.al. uses region growing to detect blobs
with a given set of seed points (Yang et al., 2006).
The main problem of this approach is, that the seed
points are chosen by taking the maximum gray-
values of the image which can lead to skipped
characters when no pixel in the characters blob has
the maximum value. In order to solve this problem
all blobs should be considered as characters. In fact
the algorithm will find more blobs than characters so
further analysis is necessary. From the binary image,
the characters can be extracted directly by analyzing
ROBUST NUMBER PLATE RECOGNITION IN IMAGE SEQUENCES
59
the connected components of the region. For each
blob the size and the upper and lower boundary is
stored for the analysis. The median value of the sizes
is computed and all blobs with a difference of more
than 10% are discarded. The same procedure is done
for the positions of the blobs. Blobs like the one in
fig. 7 after “SB” are discarded in this process. A
typical result is illustrated in fig. 8. The third
character from the left is not classified as a character
due to the size of the blob and therefore discarded.
Figure 7: Segmentation using the vertical edge projection
from (Martinsky, 2005).
Figure 8: Blob extraction using blob analysis.
3.3 Feature Extraction and Character
Classification
In our approach, character classification is done by
using a decision tree. In each stage, characters are
separated by using a comparison of features until
only one character is in each leaf. The advantage of
this approach is, that it is not relevant that one
feature alone cannot separate characters and the
decision tree is better, the more features are used.
For each character features are extracted like:
• center of mass
• compactness
• euler number
• signature
and other features (Kim H. and Kim J, 2000; Peura
and Iivarinen, 1997; Siti Norul Huda Sheikh et al.,
2007). The signature of the blob is computed by
calculating the distance from the image border to the
first blobs border-pixel for each side (top-to-bottom,
left-to-right, bottom-to-top and right-to-left). It is
then normalized to a signature of 32 values (eight on
each side) and each value of the signature is used as
a feature. Another set of features are extracted by so
called “zoning” of the blob. Zoning separates the
blob into zones where local features of each zone are
computed. The signature of the zones can also be
used as features.
Before we are able to classify characters, we first
have to train the characters by computing all features
for the whole training set (about 250.000 characters
are used) and compute feature-to-feature relations
which separates the characters best. Decisions like
If feature_1 > threshold then
are not used due to the variance to rotation and
scale of most features. Instead following relations
are used:
if feature_1 > feature_2 then
The results are decisions like “the lower left
zone’s average gray level is higher than the top right
zone’s gray level”. The decision tree can look like
the tree in fig. 9. Due to the decisions, the tree is a
binary decision tree. The result of a decision stage in
the training phase could be that 99.5% of all samples
of character1 are classified to be on the left sub-tree,
99.7% of all samples of character2 are classified to
be on the right sub-tree and 70% of all samples of
character3 are also classified to be on the right
subtree. In such cases character3 is taken in both
subtrees for a more precise decision when other
features are taken for classification.
Figure 9: Binary decision tree.
3.4 The Use of Temporal Information
A license plate of a car may be present for 30
frames, which means that 30 classifications are
stored for this plate. The classifier stores the data of
each character for all frames. In each frame all
characters are classified and the number of
characters is stored. At the actual frame the
classification includes all previous classifications of
that license plate. Consider the following example.
The license plate is classified four times:
IMAGAPP 2009 - International Conference on Imaging Theory and Applications
60
128A
28A
12BA
128H
We call these classifications single
classifications. The second classification did not
recognize the first character so all characters are
shifted to the left which causes errors in
classification. For that reason the first step is to
compute the median of the number of characters of
the classifications. In this case the median value is
four characters. For further analysis, only
classifications with the number of four characters are
taken to prevent, that classifications like the second
one in the example affects the classification. After
this step the following license plates are left:
128A
12BA
128H
The second step is the computation of the median of
the characters for each position which results in the
classification “128A”. This process is done in each
frame which leads to a converging classification
what we call the temporal classification because it is
not the final decision of the license plate. The car
corresponding to the license plate which is in the
process to be detected may drive out of the cameras
view. The license plate in that case is partly outside
of the image and the classification recognizes less
characters than before for these frames. This can
lead to misclassification and the temporal
classification converges to a wrong license plate. To
suppress this problem, the final decision is computed
by taking the maximum occurrence of the temporal
classifications. Table 1 illustrates the process of the
classification steps by an example. (The real license
plate is 128A).
Table 1: Example of a classification process.
#
Frame
Single
classification
Temporal
classification
1 128A 128A
2 28A 128A
3 128H 128A
4 12B 128A
5 12B 128A
6 12B 128A
7 12B 12B
The temporal classification of the last frame
where the license plate is visible should be the best
classification because of the converge progress. In
this example the last three frames did not recognize
the most right character due to the position of the car
which may be partly outside the view. Due to this
problem, the median of the numbers of characters at
that position is three instead of the correct number of
four so the single classifications with three
characters are taken for the temporal classification.
The final classification in this example would be
“12B” which is wrong. In that case all temporal
classifications are used to compute the classification
of maximum occurrence. “128A” has the maximum
occurrence in this example although the single
classifications are correct only in one frame of
seven. Because of the fact, that later temporal
classifications include more single classifications,
the temporal classifications should be weighed in
order to support this approach. The temporal
classifications are weighed by their number of
including single classifications. The temporal
classification in the first frame contains only one
single classification, where the temporal
classification in frame 7 contains 7 single
classifications. The final result of the example from
table 1 can be calculated as follows. The final
classification is “128A” with a score of 21:
Score of “128A” = 1+2+3+4+5+6 = 21
Score of “12B” = 7
4 EXPERIMENTAL RESULTS
The huge amount of classifications for each license
plate requires a good computational performance of
the algorithm. Our implementation was tested on an
Intel Pentium M 1.8GHz where the performances
are shown in table 2. The input images are of
dimension 640 by 480 pixels and three channels.
The vertical edge detection was only computed on
the region of the horizontal band. The table shows
the minimum and maximum performances if a
license plate was found or not.
Table 2: CPU performances of different detections.
No plate
min
No plate
max
Plate min Plate
max
290 fps 350 fps 80 fps 250 fps
The classification rate of the license plate is
subdivided into three categories. One category is the
detection if a license plate is present in the actual
frame or not. The second category is the
classification of each character and the last category
is the result of the final decision of the license plate
classification. The results can be seen in table 3,
ROBUST NUMBER PLATE RECOGNITION IN IMAGE SEQUENCES
61

where about 350.000 characters are classified and
~2000 license plates are found and classified.
Table 3: Classification performances.
Character
classification
License plate
detection
License plate
classification
~98.5% 100% ~98%
The characters and the 2000 license plates are
extracted from a 12 hours video sequence and
manually annotated for evaluation and training tests.
The conditions for the license plate classification
varied over time from dawn until dusk. The video
sequence was recorded with a static camera at a
parking garage facing the incoming cars as
illustrated in figures 10 to 14. The detection if
license plates are present in one frame was correct in
every case. Sometimes when no license plate was
present and other objects caused a high edge
projection, candidate finding was started but in such
cases all candidates are rejected. Fig. 10 to 14 show
results of our approach.
Under bad conditions the algorithm performs not
better than the single classification because if the
single classifications of a single car are incorrect in
more than 50%, the statistical analysis chooses a
incorrect license plate. The statistical analysis takes
the correct license plate if the single classifications
of a single car are correct in more than 50%. In
general the percentage of correct single
classifications has to be higher than the most
frequent incorrect candidate for the statistical
analysis to choose the correct classification.
In fig. 10 the license plate is partly polluted (“9”
and “R”) so that the classification fails. Fig. 11
illustrates a correct temporal classification due to the
weight of the previous classifications although the
light may be a reason for segmentation errors. In fig.
14 the license plate was not correctly localized. Due
to the number of single classifications, the temporal
classification is not affected.
Figure 10: License plate with polluted characters.
Figure 11: Correctly identified plate although the lights of
the car influence the segmentation.
Figure 12: Converging classification.
Figure 13: Correct temporal classification.
Figure 14: Correct temporal classification although
incorrect single classification.
IMAGAPP 2009 - International Conference on Imaging Theory and Applications
62

5 CONCLUSIONS AND FUTURE
WORK
In this paper a new approach of license plate
recognition is presented where the license plate is
not recognized only in one frame but in several
consecutive frames. For that a statistical approach is
presented in order to improve the classification
result. The single classification approach can be
adapted but in case of a real-time system, the single
classification approach should be able to be executed
several times per second. The single classification
approach used in our work performs at 70%
classification rate where our statistical analysis
improves that result to 98%. It can be predicted that
a better single classification approach combined
with our approach will achieve almost a
classification rate of 100% because single
classifications where the license plate is visible
under bad conditions can be suppressed. Our
approach extends existing approaches by analyzing
the classifications in each frame by the help of the
information from image sequences. This extension
always leads to a better classification result. For
future works the recognition should be independent
for the classification of other countries. For that a
decision tree for each countries license plate
characters and one decision tree for a “country
decision” is built. In the first step the characters are
analyzed to which country the characters belong and
in the second step the corresponding decision tree to
this country is chosen to classify the characters.
ACKNOWLEDGEMENTS
This work was partly supported by the CogVis
1
Ltd.
However, this paper reflects only the authors’ views;
CogVis
1
Ltd. is not liable for any use that may be
made of the information contained herein.
REFERENCES
Anagnostopoulos, C.N.E., Anagnostopoulos, I.E., et al.
(2006). A license plate-recognition algorithm for
intelligent transportation system applications.
Intelligent Transport Systems, 7(3): pages 377-392.
Feng Yang, Zheng Ma, Mei Xie, (2006). A novel
approach for license plate character segmentation. In
International Conference on Industrial Electronics
and Applications, pages 1-6.
Kim H., Kim J., (2000). Region-based shape descriptor
invariant to rotation, scale and translation. Signal
Process. Image Commun. 16 (2000) pages 87-93.
Martinsky O., (2007). Algorithmic and Mathematical
Principles of Automatic Number Plate Recognition
Systems, B.SC Thesis, Brno.
Peura M., Iivarinen J., (1997). Efficiency of simple shape
descriptors. In Proceedings of the Third International
Workshop on Visual Form, pages. 443-451.
Rae Lee B., (2002). An active contour model for image
segmentation: a variational perspective. In Proc. of
IEEE International Conference on Acoustics Speech
and Signal Processing, pages 1585-1588.
Ridler T.W., Calvard S., (1987). Picture Thresholding
Using an iterative Selection method. IEEE Trans. on
Systems, Man, and Cybern., vol. 8, pages 630-632.
Siti Norul Huda Sheikh A., Marzuki K., et al., (2007).
Comparison of feature extractors in license plate
recognition. In AMS '07: Proceedings of the First Asia
International Conference on Modelling & Simulation,
pages 502-506.
Xiao-Feng C., Bao-Chang P., Sheng-Lin Z., (2008). A
license plate localization method based on region
narrowing. Machine Learning and Cybernetics, 2008
International Conference, Volume 5, 12-15 July, pages
2700-2705.
Zhang Y., Zhang C., (2003). New Algorithm for Character
Segmentation of License Plate, Intelligent Vehicles
Symposium, pages 106-109.
Zhong Qin., Shengli Shi., Jianmin Xu., Hui Fu., (2006).
Method of license plate location based on corner
feature. In World Congress on Intelligent Control and
Automation, pages 8645-8649.
1
http://www.cogvis.at
ROBUST NUMBER PLATE RECOGNITION IN IMAGE SEQUENCES
63
