FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM
SUBWINDOWS AND MULTIPLE OUTPUT RANDOMIZED TREES
Marie Dumont
1
, Rapha¨el Mar´ee
2
, Louis Wehenkel
1,2
and Pierre Geurts
1,2
1
Systems and Modeling - Department of Electrical Engineering and Computer Science
University of Li`ege, Sart-Tilman B28, B-4000 Li`ege, Belgium
2
Bioinformatics and Modeling - GIGA-R, University of Li`ege, Sart-Tilman B28, B-4000 Li`ege, Belgium
Keywords:
Image annotation, Machine learning, Decision trees, Extremely randomized trees, Structured outputs.
Abstract:
This paper addresses image annotation, i.e. labelling pixels of an image with a class among a finite set of
predefined classes. We propose a new method which extracts a sample of subwindows from a set of annotated
images in order to train a subwindow annotation model by using the extremely randomized trees ensemble
method appropriately extended to handle high-dimensional output spaces. The annotation of a pixel of an
unseen image is done by aggregating the annotations of its subwindows containing this pixel. The proposed
method is compared to a more basic approach predicting the class of a pixel from a single window centered on
that pixel and to other state-of-the-art image annotation methods. In terms of accuracy, the proposed method
significantly outperforms the basic method and shows good performances with respect to the state-of-the-art,
while being more generic, conceptually simpler, and of higher computational efficiency than these latter.
1 INTRODUCTION
In this paper, we propose a new supervised learn-
ing approach for fast multi-class image annotation.
Given a training set of images with pixel-wise la-
belling (i.e. every pixel is labelled with one class
among a finite set of predefined classes), the goal is
to build a model to predict accurately the class of
every pixel of any new, unseen image. We distin-
guish this problem from image classification (where
the goal is to assign classes to entire images), image
segmentation (where the goal is to partition images
into coherent regions without semantic labelling), ob-
ject detection (where the goal is to determine if an
object of a certain type is present in an image), and
image retrieval (where the goal is to retrieve images
similar to a set of given images). In some sense,
image annotation could be considered as the joint
detection, recognition, and segmentation of (multi-
ple) objects in one image. Image annotation is also
named image labelling in (He et al., 2004), simulta-
neous object recognition and segmentation in (Shot-
ton et al., 2006), background/foreground separation
or figure/ground segregation (when only two classes
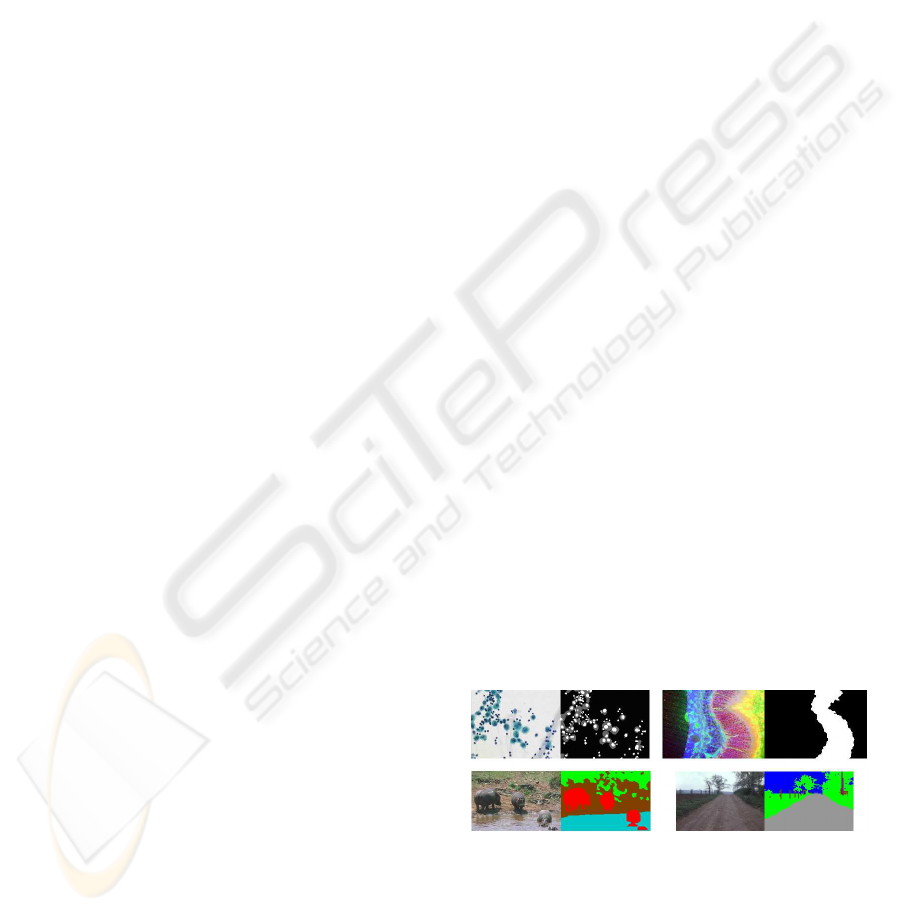
are defined) in (Yu and Shi, 2003). Examples of im-
ages and their annotation are given in Figure 1. Since
manual annotation is labor intensive and some ap-
plications require the annotation of thousands of im-
ages, there is a strong need for automatic annotation
tools. Moreover, possible applications of such tech-
niques are numerous, eg. in aerial photographyanaly-
sis or in biomedical problems where high-throughput
microscopy systems can generate thousands of im-
ages daily that represent verydifferent phenotypes un-
der various experimental conditions. In this context,
generic methods that can automatically learn to adapt
to problem specificities are strongly needed.
Figure 1: Examples of images (left) with their manual an-
notation (right). Each color on the right images represents a
different class.
Several methods have been proposed in the lit-
erature to automatically annotate images. Some of
them are ad-hoc methods developed for specific im-
age families while others seek to be more generic.
196
Dumont M., Marée R., Wehenkel L. and Geurts P. (2009).
FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM SUBWINDOWS AND MULTIPLE OUTPUT RANDOMIZED TREES.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 196-203
DOI: 10.5220/0001800001960203
Copyright
c
SciTePress

In (Cour and Shi, 2007) and (Borenstein and Malik,
2006), a bottom-up approach is used to segment horse
images into coherent regions and a top-down method
groups the segments into larger regions. The method
of (Meurie et al., 2003) was applied to cell images
and consists in simplifying the images by filtering, us-
ing a SVM pixel classifier, realizing a marker extrac-
tion and finally, applying color watershed segmenta-
tion. In (Bertelli et al., 2007), a method is proposed to
separate foreground and background of retina images,
based on the minimization of a cost function express-
ing the dissimilarity between the image to annotate
and a reference image. Several authors (Shotton et al.,
2006; Shotton et al., 2007; He et al., 2004; Verbeek
and Triggs, 2007) have proposed to use conditional
random field models for image annotation. These ap-
proaches differ in the features that are exploited in
the model (which are based on texture, shape, color,
layout, location...), the incorporation of local and/or
global information, and in the way the model param-
eters are learned.
Our starting point in this paper is the image clas-
sification method of Mar´ee et al. (Mar´ee et al., 2003;
Mar´ee et al., 2005) based on the extraction of ran-
dom subwindows, their description by raw pixel val-
ues, and their classification by extremely randomized
trees (Geurts et al., 2006a). Randomization of patch
extraction was first proposed in (Mar´ee et al., 2003)
for image classification and subsequently in (Mar´ee
et al., 2005; Nowak et al., 2006). To the best of
our knowledge it was never considered for multi-class
pixelwise labelling. Different variants of randomized
trees were used in the recent years by an increas-
ing number of computer vision researchers, respec-
tively for content-based image retrieval (Mar´ee et al.,
2007; Philbin et al., 2007), keypoint tracking (Lepetit
and Fua, 2006) (inspired by (Amit and Geman, 1997)
for handwritten digit recognition), object categoriza-
tion (Bosch et al., 2007; Moosmann et al., 2006), vi-
sual identification (Nowak and Jurie, 2007), bilayer
video segmentation (Yin et al., 2007), robot naviga-
tion (Jodogne et al., 2006; Ernst et al., 2006), image
reconstruction (Geurts et al., 2006b). Very recently
(Shotton et al., 2008), ensembles of randomized trees
were used to build bags of semantic textons for image
annotation. Another decision tree model, the Proba-
bilistic Boosting-Tree, was used in the context of the
detection of object boundaries (Dollar et al., 2006) to
classify as edge or non-edge the central pixel of image
patches described by roughly 50000 features.
The paper is structured as follows. We first de-
scribe a basic pixel annotation method and then our
proposed method in Section 2. The first one is
an adaptation of Mar´ee et al’s image classification
method (Mar´ee et al., 2005) to classify each pixel
from a subwindow centered on it. The proposed ap-
proach exploits a multiple output extension of deci-
sion trees to simultaneously annotate all pixel labels
of a subwindow. In Section 3, these methods are con-
fronted on a diverse set of problems taken from the
literature to assess their generality and compare their
performances. We also analyse these two methods in
terms of computing times and parameter sensitivity.
Finally, we conclude and provide future work direc-
tions in Section 4.
2 METHODS
In Section 2.1, we briefly remind the basic princi-
ples behind the image classification method of (Mar´ee
et al., 2005). Section 2.2 describes our two extensions
for dealing with the image annotation problem.
2.1 Image Classification
The goal of image classification is to build, from a
learning sample of images, each labelled with a class
among a set of predefined classes, a classifier able to
predict as well as possible the class of unseen images.
To this end, the method described in (Mar´ee et al.,
2003; Mar´ee et al., 2005) first randomly extracts a
large set of image subwindows and describes them by
feature vectors composed of raw pixel values. Each
subwindow is labelled with the class of its parent im-
age. Then, a supervised learning method is used to
build a subwindow classification model from these
subwindows. At the prediction stage, subwindows are
extracted from the unseen image and classified by the
subwindow classifier. These predictions are then ag-
gregated to get a single class prediction for the whole
image.
In principle, any supervised classification method
can be used to grow the subwindow classifiers. Mar´ee
et al. exploited a particular decision tree ensemble
method, called extremely randomized trees or Extra-
Trees (Geurts et al., 2006a). This method grows an
ensemble of M (typically M ∈ [10;100]) unpruned
trees, each one being created in a top-down fash-
ion. With respect to other tree-based ensemble meth-
ods such as Tree Bagging or Random Forests, Extra-
Trees select cut-points at random and use the whole
learning sample rather than a bootstrap replica. Their
node splitting algorithm depends on two parameters,
namely the size K of the random subset of attributes
considered at each split, and the minimal (sub)sample
size to split a node, n
min
. In our experiments in Sec-
tion 3, we will use the default value recommended in
FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM SUBWINDOWS AND MULTIPLE OUTPUT
RANDOMIZED TREES
197

(Geurts et al., 2006a), i.e. K equal to the square root
of the total number of attributes and n
min
= 2 (corre-
sponding to fully developed trees). In Section 3.5, we
will discuss the influence of K on accuracy and com-
puting times.
2.2 Image Annotation
We address the problem of image annotation as fol-
lows: given a sample LS of images with every pixel
labelled with one class among a finite set of prede-
fined classes, build a classifier able to predict as accu-
rately as possible the class of every pixel of an unseen
image.
2.2.1 Subwindow Classification Model (or SCM)
A first obvious, but novel,extension of the image clas-
sification approach (Mar´ee et al., 2005) for dealing
with pixelwise labeling is to associate to each subwin-
dow the class of its central pixel and then to label the
pixels of an image with this classifier. The different
steps of this approach are detailed below.
Learning Sample Generation. The learning sam-
ple of subwindows that will be used to create the sub-
window centralpixel classifier is created by extracting
subwindows of fixed size w×h at random positions in
training images. Each subwindow is then labeled by
the class of the central pixel in its parent image. Each
subwindow is described by the HSB values of its raw
pixels, yielding a vector of w ×h ×3 numerical at-
tributes.
Learning. From the learning sample created at the
previous step, a model is built using ensembles of
extremely randomized trees (following (Mar´ee et al.,
2005)). Each test associated to an internal node of
a tree simply compares a pixel HSB component to a
numerical threshold (T = [a < a
c
]). The search of the
best internal test among K random tests requires to de-
fine a score measure. Different scores measures have
been proposed in the decision tree literature. In this
paper, we have chosen the Gini splitting rule of CART
(Breiman et al., 1984) (also used in Random Forests)
1
. Formally, this score measure is defined as follows:
score(S,T) = G
C
(S) −G
C|T
(S), (1)
with
G
C
(S) =
m
∑
i=1
n
i.
n
..
.(1−
n
i.
n
..
), (2)
1
We did some comparison with a log entropy based
score that does not show any significant difference. We
choose Gini entropy because it is faster to compute.
G
C|T
=
2
∑
j=1
m
∑
i=1
n
ij
n
..
.(1−
n
ij
n
. j
), (3)
where S is the subsample of size n
..
associated to
the node to split, m is the number of pixel classes,
n
i.
(i = 1,...,m) is the number of subwindows in S
whose central pixel is of class i, n
i1
(resp. n
i2
) is the
total number of subwindows of S whose central pixel
is of class i and which satisfy (resp. do not satisfy)
the test T, while n
.1
(resp. n
.2
) is the number of sub-
windows of S which satisfy (resp. do not satisfy) T.
The vector of probabilities which is attributed to
each terminal node (or leaf) is computed by using the
subset S of LS reaching this node: the i-th element (i=
1,...,m) is the proportion of subwindows of S whose
central pixel is in the ith class.
Prediction Step. For each pixel a subwindow cen-
tered on it is extractedfrom thetest image and its class
is predicted using the Extra-Trees, by averaging the
class-probability vectors returned by the trees of the
ensemble and selecting the most probable class. Note
that when we extract the subwindow centered on a
pixel which is close to the borders of the image, we
simply consider that the part of the subwindow that is
out of the image is composed of black pixels.
Computational Complexity. The number of oper-
ations to build M trees from a learning sample of N
subwindows is O (M
√
whNlog
2
N). The classification
of a pixelwith an ensemble of M balancedtrees grown
from a sample of N subwindows requires on the av-
erage O (Mlog
2
N) tests. The number of subwindows
to extract is equal to the number of image pixels. The
annotation is thus linear in the size of the image.
2.2.2 Subwindow Classification Model with
Multiple Outputs (or SCMMO)
We now describe a second approach whose main dif-
ference with the previous one is that the subwindows
classifier is extended so as to predict the class of all
subwindow pixels.
Learning Sample Generation. Random subwin-
dows of size w×h are extracted from training images
as in the previous method. The difference is that the
full annotation is associated to each subwindow.
Learning. Our idea here is to build a classifier able
to predict at once a class for each pixel of a sub-
window (instead of only the central pixel). Several
extensions of decision trees have been proposed to
handle multiple outputs (eg. (Geurts et al., 2006b)).
These methods differ from the standard tree-growing
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
198
method in the score measure used to select splits and
in the way predictions are computed at tree leaves.
The score measure that we propose here is the av-
erage of the Gini entropy based score for each output
pixel. More precisely, we have:
score(S,T) =
1
w.h
w∗h
∑
k=1
score
k
(S,T) (4)
score
k
(S,T) = G
k
C
(S) −G
k
C|T
(S) (5)
G
k
C
(S) =
m
∑
i=1
n
i.k
n
...
(1−
n
i.k
n
...
) (6)
G
k
C|T
=
2
∑
j=1
m
∑
i=1
n
ijk
n
...
(1−
n
ijk
n
. j.
), (7)
where the parameters have the same meaning as in
the previous section with the addition of the index k ∈
1,..., wh that references the subwindow pixels.
Once the tree is built, class probability estimates
at each subwindow position could then be obtained at
each leaf simply by computing class frequencies over
all subwindows that reach the leaf. However, the size
of such a probability vector is equal to the number of
pixels times the number of classes and thus the stor-
age of these vectors at each leaf node could require
a lot of memory space. To reduce this requirement,
in our implementation, we have decided to keep track
only of the majority class of each pixel together with
its confidence as measured by its frequency. This sim-
plification leads to memory requirements independent
of the number of classes
2
.
Prediction. The annotation process again consists
in extracting subwindows and in testing each one of
them with all the trees. To get a prediction for each
pixel, these subwindows need at least to cover the
whole image. However, we observed that the more
subwindows are extracted, the better the predictions.
Thus, in our experiment, we extracted all possible,
overlapping, subwindows.
By testing each subwindow with all the trees, a
set of tuples (class number,rate of confidence) is as-
signed to each pixel of the initial image. From this set
of predictions, a vector of size m (number of different
classes) is computed for each pixel: its i-th element
(i = 1,...,m) is the sum of the confidence numbers
which are associated to the i-th class among all pre-
dictions. The predicted class for the considered pixel
is the one that receives the highest overall confidence.
2
We run several experiments keeping the full class prob-
ability vectors at tree leaves but no significant difference
was observed.
Table 1: Main properties of the four datasets.
DB # Im. Im. size Protocol # Subwin.
per image
Retina 50 [630×420, LOO 2000
1386×924]
Bronchia 8 752×574 LOO 10000
Corel 100 180×120 2×(60/40) 1650
Sowerby 104 96×64 2×(60/44) 1650
Computational Complexity. With respect to the
SCM approach, the complexity at the learning stage is
multiplied by the number of output pixels. This leads
to a complexity of O (M(wh)
3
2
N log
2
N) to grow M
trees from N subwindows of size w×h. As in SCM,
the computation of a prediction for a subwindow
with M trees requires O (Mlog
2
N) tests. The number
of subwindows is equal to (w
i
−w + 1)(h
i
−h + 1),
where w
i
and h
i
are respectively the width and the
height of the image to annotate.
3 EXPERIMENTS
In this section, we provide experiments on four
databases. After a description of the problems, we
compare the two methods that are proposed and con-
clude the section with a discussion of computing
times and the influence of the main parameters of the
algorithms.
3.1 Databases
Experiments are conducted on four datasets briefly
described below. The main properties of these
datasets are summarized in Table 1. Examples of im-
ages are given in Figure 1.
Retina. This dataset consists of 50 microscope im-
ages of vertical sections through cat retinas
3
. Each
pixel must be classified in either the retina class (more
precisely the retina outer nuclear layer) or the back-
ground class.
Bronchial. The second database is the Bronchial
Image Database
4
, which contains 8 color images from
bronchial cytology. The pixels of these images have
to be classified into one of the three following classes:
cell nucleus, cell cytoplasm and background.
3
http://www.bioimage.ucsb.edu/research/
retina_seg.php
4
http://users.info.unicaen.fr/
˜
lezoray/
Databases.php
FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM SUBWINDOWS AND MULTIPLE OUTPUT
RANDOMIZED TREES
199

Table 2: Accuracy results.
Database PCM SCM (w
∗
) SCMMO (w
∗
)
Retina 12.54% 7.53% (5) 7.56% (5)
Bronchial 3.96% 3.42% (10) 3.13% (10)
Corel 53.71% 49.43% (5) 36.01% (20)
Sowerby 17.5% 14.96% (5) 10.93% (5)
Corel. The Corel database
5
contains 100 images of
wild life. Seven classes are defined: rhino/hippo, po-
lar bear, vegetation, sky, water, snow, and ground.
Sowerby. This database
6
contains 104 images of
landscape with roads, trees, etc. The pixels must be
classified in 7 classes: sky, vegetation, road marking,
road surface, building, street object and car.
3.2 Accuracy Results
In this section, we compare three methods in terms of
accuracy: the two approaches presented in the previ-
ous section and, as a baseline, a method called PCM
(for pixel classification model) that only uses the in-
formation about the pixel itself to predict its class,
neglecting its surrounding context. Both SCM and
SCMMO reduce to this baseline when the size of the
subwindows is fixed to 1 (w = h = 1).
Results are reported in Table 2. The test protocol
is given in the fourth column of Table 1. For the first
two datasets, we used leave-one-out cross-validation.
For Corel, we use 60 images for training and 40 im-
ages for testing and we randomized our tests twice
(with different LS and TS). We use the same protocol
for Sowerby with 60 and 44 images respectively for
training and testing. In each case, we built 20 trees.
The number of subwindows extracted per learning
image (in the fourth column of Table 1) was chosen
such that the learning sample contains about 100000
subwindows. We restrict ourselves to square subwin-
dows (w = h) and considered four different subwin-
dow sizes on each problem, w ∈{1,5,10,20}. In Ta-
ble 2, we only report the best results over these sizes,
together with the optimal size (w
∗
). For an image, the
error rate is measured as the ratio between the number
of incorrectly classified pixels and the total number of
pixels of this image. Results in Table 2 are average er-
ror rates over all images in the test sample. Visual ex-
amples of predictions can be found in (Dumont et al.,
2009).
From Table 2, it is clear that SCM and SCMMO
are more efficient than the baseline pixel classifier.
5
http://www.cs.toronto.edu/
˜
hexm/label.htm
6
http://www.cs.toronto.edu/
˜
hexm/label.htm
We also observe that SCMMO is almost always sig-
nificantly better than SCM. These results are not sur-
prising. Since PCM and SCM classify every pixel
independently of the classification of its neighbors,
their predictions can be very discontinuous over the
image. This is well illustrated by the very noisy ap-
pearance of the PCM and SCM annotations (Dumont
et al., 2009). On the other hand, SCMMO produces
smoother predictions for every subwindow as it tries
to predict all subwindow pixels at once. Furthermore
the final pixel classification is obtained by averaging
the predictions over all subwindows that cover that
pixel, which further reduces the variance of the anno-
tation.
3.3 Comparison with State-of-the-art
In this subsection, we compare our results to other
results presented in the literature on each dataset:
Retina: (Bertelli et al., 2007) obtained F-measures
7
on this problem ranging from 0.873 to 0.883. We
obtained the following F measures: 0.769 for PCM,
0.869 for SCM, and 0.870 for SCMMO. Note how-
ever that Bertelli et al’s test protocol is significantly
different from ours (they used one reference image
for learning and all 50 images for testing).
Bronchial: (Meurie et al., 2003) reports error rates
for each class separately using 4 images for training
and 4 images for testing. They obtained 29.1% for
the cytoplasm class and 12.6% for the nucleus class.
For comparison, SCMMO gives 23.86% for the Cyto-
plasm class and 23.1% for the Nucleus class.
Corel: State-of-the-art results (He et al., 2004; He
et al., 2006; Shotton et al., 2006; Verbeek and Triggs,
2007) range from 20% to 33.1% error rates, evalu-
ated on one run using the same number of images for
learning and testing as ours.
Sowerby: Error rates reported in the literature ((He
et al., 2004; He et al., 2006; Shotton et al., 2006; Ver-
beek and Triggs, 2007)) range from 10.5% to 17.6%
error rates. Note that taking a larger K for the Extra-
Trees method and extracting 5 times more subwin-
dows, it is possible to decrease our error rate down to
10.3% (see Section 3.5 for a discussion of these pa-
rameters).
In most of the cases, SCMMO results are thus
comparable to those obtained by the state-of-the-art.
Only on the Corel problem, are our results signifi-
cantly less good than others. However, it has to be
noted that exactly the same method was applied here
on the four different problems without any specific
7
F-Measure is defined in (Bertelli et al., 2007) as
the harmonic mean of precision (p) and recall (r): F =
2pr/(p+ r).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
200
adaptation while other methods are usually evaluated
on less diverse types of images. Suggestions to fur-
ther improve the results of the proposed method on
specific problems are given in Section 4.
3.4 Computing Times
The annotation with our method is quite fast. Com-
puting times are obviously a function of the size of
the image to annotate. In our case, the complexity is
minimal as it is linear with respect to the image size.
Table 3 gives the duration of the building of 20 trees
and of the annotation of an image in the case of the
Sowerby and Retina databases
8
. The dimension of
the subwindows is 5×5. The Sowerby database con-
tains very small images (94 ×64) while Retina con-
tains larger ones (752 ×574 minimum). For Retina,
the annotation times are given for one image of size
990×660.
For comparison, computing times for He et al.’s
method on Sowerby are 24h for training and 30s
per image prediction (mentioned by (Shotton et al.,
2007)), TextonBoost needs 5h/10s (Shotton et al.,
2006) or 20m/1.1s (Shotton et al., 2007), (Verbeek
and Triggs, 2007) requires 20m/5s, while our best
method, SCMMO, needs about 6m for learning and
less than 1s per image for annotation.
Note that the method offers several possibilities to
further reduce training and prediction times. To build
trees, we could consider using a smaller subset of at-
tributes at each split (parameter K). In the next sub-
section, we will also highlight the fact that a smaller
number of trees could be used. To reduce the comput-
ing times at the prediction stage, we could consider
subsampling subwindows in test images, in principle
at the expense of classification accuracy. Some pre-
liminary results show that it is possible to reduce this
sampling rate at least by a factor of two without sig-
nificant increase in error rates. It is also worth noting
that our method is highly parallelizable. Indeed, tree
induction, subwindow extraction and their propaga-
tion in trees are processes that could be run indepen-
dently and their results subsequently aggregated.
3.5 Influence of Method Parameters
Our methods essentially depend on four parameters:
the subwindow size h×w, the number of trees M, the
number N of extracted subwindows to build up the
training set, and the Extra-Tree parameter K that fil-
ters test during tree induction.
8
The method is implemented in JAVA and runs on a
2.4Ghz processor
Table 3: Training and prediction times on Retina and
Sowerby (20 trees).
Dataset Sowerby Retina
Method Training Prediction Training Prediction
PCM 10.53s 0.15s 5.34s 15.19s
SCM 76.63s 0.12s 41.22s 17.64s
SCMMO 315.68s 0.26s 125.5s 26.98s
Table 4: Influence of the Extra-Tree K parameter with
SCMMO (100 000 training subwindows, 20 trees).
Database K = 1 K =
√
m K = m
Retina 8.22 (58s) 7.56 (125s) 7.23 (1219s)
Bronchial 3.27 (134s) 3.13 (994s) 3.16 (24835s)
Corel 38.00 (284s) 36.01 (9115s) 36.79 (18714s)
Sowerby 11.67 (108s) 10.93 (316s) 10.49 (3581s)
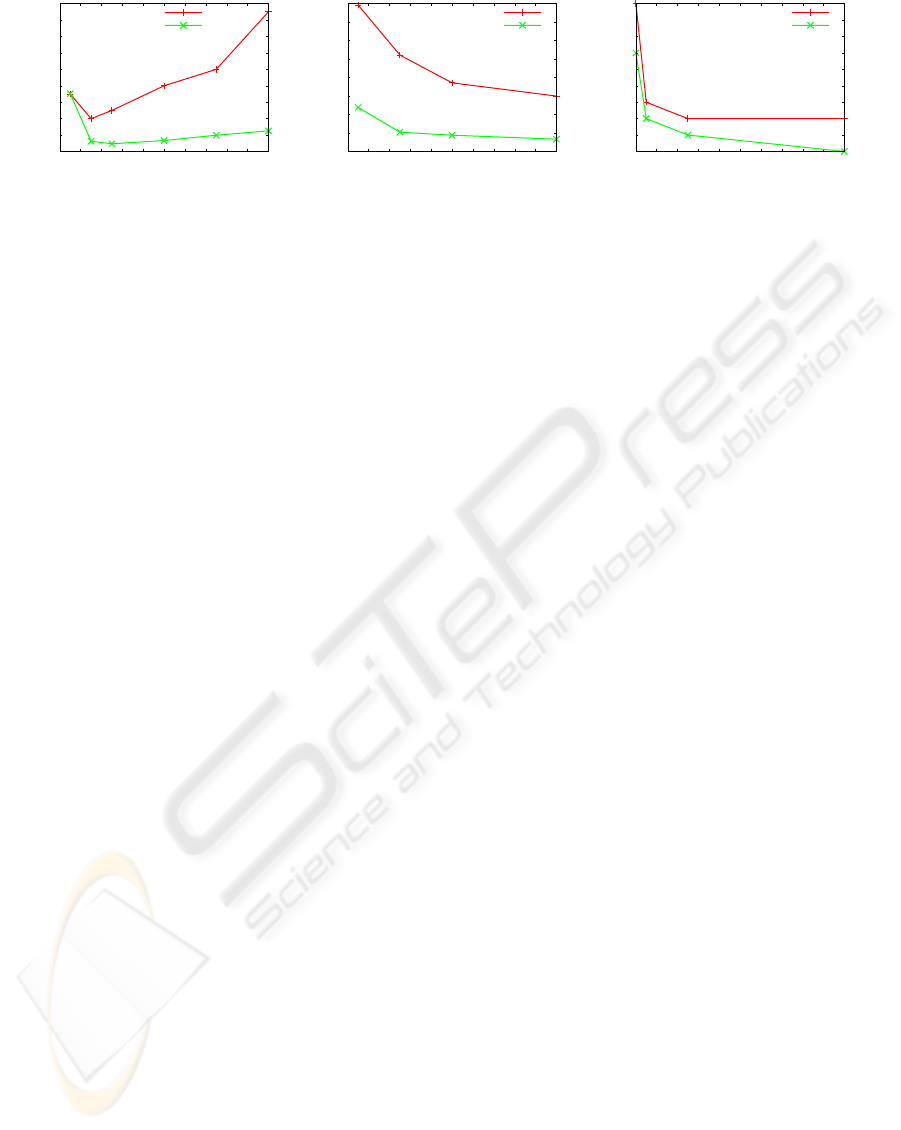
The influence of the size of the extracted subwin-
dows is significant. In most of the cases, we observed
that there exist an optimal size, which is problem de-
pendent. This is illustrated for the Sowerby database
in Figure 2.
Concerning the number of trees, since each tree of
the ensemble classifier is an independent realization
of the random tree growing process, the more trees
are grown, the better is the accuracy of the ensem-
ble classifier. This is clearly illustrated in Figure 2 on
the Corel problem. In most cases, the error converges
however quite rapidly. With SCMMO, 10 trees give
already quite good results. Notice that more trees are
however needed with SCM since this latter does not
benefit from the additional averaging effect of multi-
ple subwindows voting for a same pixel as in the case
of SCMMO.
Concerning the number of subwindows extracted
from the images in order to create the learning sam-
ple, like the number of trees, the larger it is, the better.
This is illustrated in Figure 2 in the case of the Retina
database. Notice that good results are typically ob-
tained by using a learning sample containing about
100 000 subwindows. Usually, this parameter should
be fixed to the maximal possible value giventhe avail-
able computer resources.
The Extra-Tree parameter K influences both accu-
racy and computing times (lower values of K require
less score computations). Table 4 shows results in
terms of error rates and computing times for three val-
ues of K: K = 1, K =
√
m, and K = m, where m = 3wh
is the total number of attributes. Setting K to m im-
proves accuracy on Retina and Sowerby. The default
setting K =
√
m is however very close in terms of ac-
curacy and brings an important improvement of com-
puting times. Taking K = 1 deteriorates accuracy with
respect to the two other settings but the resulting error
FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM SUBWINDOWS AND MULTIPLE OUTPUT
RANDOMIZED TREES
201
10
12
14
16
18
20
22
24
26
28
0 2 4 6 8 10 12 14 16 18 20
Error rate (%)
h(=w)
SCM
SCMMO
38
40
42
44
46
48
50
52
54
0 2 4 6 8 10 12 14 16 18 20
Error rate (%)
M
SCM
SCMMO
7
8
9
10
11
12
13
14
15
16
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Error rate (%)
N
SCM
SCMMO
Figure 2: Left: error rate versus width (= height) of the subwindows on the Sowerby database. Middle: error rate versus
number of trees on the Corel database. Right: error rates versus total number of learning subwindows on the Retina database.
rate might still be considered acceptable for some ap-
plications where low computing times are important.
Note that this value of K amounts at building the trees
in an unsupervised way (ie., not looking at the outputs
when selecting the tests).
4 CONCLUSIONS AND FUTURE
WORK
In this paper, we have introduced and compared
two generic image annotation methods: SCM and
SCMMO. We have shown that the idea of (Mar´ee
et al., 2005) for image classification using random
subwindows and ensemble of randomized trees can
be extended for pixel-wise labelling. In particular,
our extension of extremely randomized trees to deal
with multiple output prediction opens the door to a
wide range of potential applications. Indeed, from our
experiments on four distinct databases, SCMMO ap-
pears to be the most interesting one among the two
proposed methods: SCMMO is almost always signif-
icantly better than SCM and by using it, we obtained
good results on three problems among four. We deem
that the main merit of our approach is its good over-
all performance while remaining conceptually very
simple and keeping computing times very low. Our
approach also requires less tuning than others which
makes it an excellent candidate as an off-the-shelf
method even if it does not reach state-of-the-art re-
sults on each and every problem. Moreover, it might
be exploited as a first, fast step for image annotation
as its output predictions might be post-processed by
various techniques at the local and/or global level.
Although we focused on the design of a generic
method, possible improvements or extensions of this
framework are numerous and might be considered to
improve results when dealing with a specific problem.
First, as proposed by (Mar´ee et al., 2005) in the con-
text of image classification, it could be possible to in-
troduce more robustness into the pixel classification
models by applying random perturbations (rotation,
scaling, etc.) to the subwindows or original images
before the learning stage. Computing features at mul-
tiple scales or orientations or over various filter re-
sponses (like in (Dollar et al., 2006)) instead of using
feature vectors composed by raw pixel values might
also help to achieve a higher level of invariance and
robustness to disturbances that might be required for a
given application. However, such an extension would
require additional computational costs.
There exist also several further degrees of free-
dom in the way subwindows are extracted. For in-
stance, we could generate several models exploit-
ing each a different size of input/output subwindows.
This would allow to combine into the final model lo-
cal and global information from the images. For ex-
ample, some preliminary results show that combin-
ing three models built on subwindows of sizes 5 ×5,
2 × 30 and 30 × 2 reduces the error rate on Corel
dataset with SCMMO downto 33.89%. Optimizing
the number of models and the subwindow sizes might
further improve the accuracy on a given problem.
Also, our multiple output model can be cast as
a special case of the generic method proposed in
(Geurts et al., 2006b) to handle complex kernelized
output spaces. We believe that it would be interest-
ing to exploit this method with more ad hoc kernels
for image annotation, for example to take more ex-
plicitly into account correlations among neighboring
pixel classes or any other domain specific knowledge.
Comparison with other recent image annotation
methods using randomized trees should also be inves-
tigated (Shotton et al., 2008; Schroff et al., 2008).
Finally, other computer vision applications of ran-
dom subwindows and tree-based ensemble methods
with high-dimensionaloutput spaces might be investi-
gated, e.g. the detection of edges (Dollar et al., 2006).
ACKNOWLEDGEMENTS
PG and MD acknowledge the support of the Fonds
National de la Recherche Scientifique (FNRS, Bel-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
202

gium). This paper presents research results of the
Belgian Network BIOMAGNET (Bioinformatics and
Modeling: from Genomes to Networks), funded by
the Interuniversity Attraction Poles Programme, initi-
ated by the Belgian State, Science Policy Office. The
scientific responsibility rests with the authors.
REFERENCES
Amit, Y. and Geman, D. (1997). Shape quantization and
recognition with randomized trees. Neural computa-
tion, 9:1545–1588.
Bertelli, L., Byun, J., and Manjunath, B. S. (2007). A varia-
tional approach to exploit prior information in object-
background segregation: application to retinal images.
In ICIP.
Borenstein, E. and Malik, J. (2006). Shape guided object
segmentation. In CVPR, pages 969–976.
Bosch, A., Zisserman, A., and Munoz, X. (2007). Image
classification using random forests and ferns. In Proc.
ICCV.
Breiman, L., Friedman, J., Olshen, R., and Stone, C. (1984).
Classification and Regression Trees. Wadsworth and
Brooks, Monterey, CA.
Cour, T. and Shi, J. (2007). Recognizing objects by piecing
together the segmentation puzzle. In CVPR.
Dollar, P., Tu, Z., and Belongie, S. (2006). Supervised
learning of edges and object boundaries. In CVPR,
pages 1964–1971.
Dumont, M., Mar´ee, R., Wehenkel,
L., and Geurts, P. (2009).
http://www.montefiore.ulg.ac.be/services/stochastic/
pubs/2009/DMWG09/.
Ernst, D., Mar´ee, R., and Wehenkel, L. (2006). Reinforce-
ment learning with raw image pixels as input state.
In Proc. International Workshop on Intelligent Com-
puting in Pattern Analysis/Synthesis, volume 4153 of
Lecture Notes in Computer Science, pages 446–454.
Geurts, P., Ernst, D., and Wehenkel, L. (2006a). Extremely
randomized trees. Machine Learning, 36(1):3–42.
Geurts, P., Wehenkel, L., and d Alch´e-Buc, F. (2006b). Ker-
nelizing the output of tree-based methods. In ICML,
pages 345–352.
He, X., Zemel, R., and Carreira-Perpinan, M. (2004). Mul-
tiscale conditional random fields for image labelling.
In CVPR, volume 2, pages 695–702.
He, X., Zemel, R., and Ray, D. (2006). Learning and in-
corporating top-down cues in image segmentation. In
ECCV, pages 338–351.
Jodogne, S., Briquet, C., and Piater, J. (2006). Approxi-
mate policy iteration for closed-loop learning of vi-
sual tasks. In Proc. of the 17th European Conference
on Machine Learning, volume 4212, pages 222–226.
Lepetit, V. and Fua, P. (2006). Keypoint recognition us-
ing randomized trees. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28(9):1465–1479.
Mar´ee, R., Geurts, P., Piater, J., and Wehenkel, L. (2005).
Random subwindows for robust image classification.
In CVPR, volume 1, pages 34–40.
Mar´ee, R., Geurts, P., Visimberga, G., Piater, J., and We-
henkel, L. (2003). An empirical comparison of ma-
chine learning algorithms for generic image classifi-
cation. In Proc. SGAI-AI, pages 169–182.
Mar´ee, R., Geurts, P., and Wehenkel, L. (2007). Content-
based image retrieval by indexing random subwin-
dows with randomized trees. In Proc. ACCV, volume
4844 of LNCS, pages 611–620.
Meurie, C., Lebrun, G., Lezoray, O., and Elmoataz, A.
(2003). A comparison of supervised pixels-based
color image segmentation methods. application in
cancerology. WSEAS Transactions on computers, spe-
cial issue on SSIP’03, 2:739–744.
Moosmann, F., Triggs, B., and Jurie, F. (2006). Randomized
clustering forests for building fast and discriminative
visual vocabularies. In Neural Information Processing
Systems (NIPS).
Nowak, E. and Jurie, F. (2007). Learning visual similarity
measures for comparing never seen objects. In Proc.
IEEE CVPR.
Nowak, E., Jurie, F., and Triggs, B. (2006). Sampling strate-
gies for bag-of-features image classification. In Proc.
ECCV, pages 490–503.
Philbin, J., Chum, O., Isard, M., Sivic, J., and Zisserman, A.
(2007). Object retrieval with large vocabularies and
fast spatial matching. Proc. IEEE CVPR.
Schroff, F., Criminisi, A., and Zisserman, A. (2008). Object
class segmentation using random forests. In Proc. of
the British Machine Vision Conference (BMVC).
Shotton, J., Johnson, M., and Cipolla, R. (2008). Semantic
texton forests for image categorization and segmenta-
tion. In Proc. IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Shotton, J., Winn, J., Rother, C., and Criminisi, A. (2006).
Textonboost: Joint appearance, shape and context
modeling for multi-class object recognition and seg-
mentation. In ECCV, pages I: 1–15.
Shotton, J., Winn, J., Rother, C., and Criminisi, A. (2007).
Textonboost for image understanding: Multi-class ob-
ject recognition and segmentation by jointly modeling
appearance, shape and context. In International Jour-
nal on Computer Vision.
Verbeek, J. and Triggs, B. (2007). Scene segmentation with
conditional random fields learned from partially la-
beled images. In Proc. NIPS.
Yin, P., Criminisi, A., Winn, J., and Essa, I. (2007). Tree-
based classifiers for bilayer video segmentation. In
Proc. CVPR.
Yu, S. X. and Shi, J. (2003). Object-specific figure-ground
segregation. In CVPR, volume 2, pages 39–45.
FAST MULTI-CLASS IMAGE ANNOTATION WITH RANDOM SUBWINDOWS AND MULTIPLE OUTPUT
RANDOMIZED TREES
203
