
READING STREET SIGNS USING A GENERIC STRUCTURED
OBJECT DETECTION AND SIGNATURE RECOGNITION
APPROACH
Sobhan Naderi Parizi, Alireza Tavakoli Targhi, Omid Aghazadeh and Jan-Olof Eklundh
Computational Vision and Active Perception Laboratory
Royal Institute of Technology (KTH)
SE-100 44, Stockholm, Sweden
Keywords:
Structural object detection, Text detection, Text segmentation, Text recognition.
Abstract:
In the paper we address the applied problem of detecting and recognizing street name plates in urban images
by a generic approach to structural object detection and recognition. A structured object is detected using a
boosting approach and false positives are filtered using a specific method called the texture transform. In a
second step the subregion containing the key information, here the text, is segmented out. Text is in this case
characterized as texture and a texton based technique is applied. Finally the texts are recognized by using
Dynamic Time Warping on signatures created from the identified regions. The recognition method is general
and only requires text in some form, e.g. a list of printed words, but no image models of the plates for learning.
Therefore, it can be shown to scale to rather large data sets. Moreover, due to its generality it applies to other
cases, such as logo and sign recognition. On the other hand the critical part of the method lies in the detection
step. Here it relied on knowledge about the appearance of street signs. However, the boosting approach also
applies to other cases as long as the target region is structured in some way. The particular scenario considered
deals with urban navigation and map indexing by mobile users, e.g. when the images are acquired by a mobile
phone.
1 INTRODUCTION
Recognition of an outdoor location from images taken
from an indefinitely wide variety of scenes full of dif-
ferent objects is not a straightforward problem. It is
even more challenging if we want to search for spe-
cific elements of these scenes such as signs, logos or
specific buildings. One way of approaching the prob-
lem could be to recognize street name plates or other
landmarks in the scene. That would allow us to lo-
calize our position, index into a map and to recognize
the scene, whether or not we had access to additional
information from other knowledge sources including
GPS (Global Positioning System) which is not always
reliable or available in urban areas. In the application
behind this work the images come from cell phones
or other mobile devices. Then some general contex-
tual information that limits the scope of the problem
may be available. Positioning information can be sent
by cell phones to the service provider transceiver sta-
tions (BTSs). Result of this information is a rough
estimate of location of the cell phone user as shown
in Figure 16. We address the problem of recognizing
street name plates in urban scenes by a rather general
approach of structural object detection/recognition.
More precisely we define the problem as consisting
of three steps: the problem of detecting a specific
class of objects about which you have some a priori
knowledge, the object detection problem, the prob-
lem of finding an area which holds some representa-
tive information, in this case areas containing text, the
(within object) segmentation problem and finally, the
problem of recognizing the information in this area,
the recognition problem. In the paper we will intro-
duce a fast, accurate and general purpose framework
for dealing with the three mentioned steps, i.e. detec-
tion and recognition of parts holding some representa-
tive information, in this case text plates. It is assumed
that there is a signature that uniquely identifies the
output. The way we have formulated the approach it
has many other applications as well, although we here
focus on finding and interpreting street name plates in
urban scenes. In order to have a full overview of what
is done in our detection and recognition scenario, you
346
Naderi Parizi S., Tavakoli Targhi A., Aghazadeh O. and Eklundh J. (2009).
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE RECOGNITION APPROACH.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 346-355
DOI: 10.5220/0001797703460355
Copyright
c
SciTePress

can have a look at Figure 3.
Throughout this paper we experiment with our
methods a new database of street plate objects taken
from central part of Graz city in Austria (mostly
around Herrengasse street)
1
. To have a sense of the
location where the images are taken from you can
have a look at Figure 1.
Figure 1: Streets included in the database are marked as red
in the map of Graz city. The long tilt street is Herrengasse.
2
This database consists of two sets of images. The
first set contains 86 outdoor images of street plates in
various view points, scales and light conditions taken
by an ordinary cell phone camera with 1280 × 960
pixels of resolution. The second set is comprised of
120 images of similar scenes but taken by a different
camera (2448 × 3264 pixel images). For each single
plate, there are 9 images with three different scales
and three different viewpoints. Variation of scales and
orientations of the target objects within the database
are showed in Figure 2.
In the remainder of the paper we first review
some related work. Section 2 goes through the detec-
tion and recognition phase. A detailed discussion on
methods investigated for localization of the target ob-
jects is found in Section 2.1. Filtering false positives
by post-processing is described in 2.1.1. In particular
we explain a specific technique, the LU-transform in
detail there. Then the methods used for segmentation
of textual regions of interest are presented in Section
2.1.3. The last step of our framework, recognition of
the text images, is explained in Section 2.2. In Sec-
tion 3 we present a system where our solutions come
in handy. We finally make some conclusions in Sec-
tion 4.
1
This is a new database created by us and will be avail-
able for public after publication of this paper.
2
Screen shot from Google map search.
1.1 Related Work
There has been a large amount of research on ob-
ject detection, text segmentation (detection) and text
recognition. We need a method which can provide a
solution to these three tasks simultaneously and we
want it to be accurate, fast, general and insensitive
to illumination variations and affine transformations.
We also want the method to perform well without any
specific assumptions about the font, size and any other
characteristics of the text.
Although character based text recognition has at-
tracted considerable attention in research, there are
cases that character recognition is not easy or feasi-
ble e.g. at high levels of noise, low resolution pic-
tures (commercial OCR software usually works on
scanned data). There has been some work on word-
level text recognition that have shown promising re-
sults (Adamek et al., 2007) (Ishidera et al., 2002)
(Ataer and Duygulu, 2007). Due to the limitations
of character based methods and since we have a lim-
ited vocabulary, we based our method on such an ap-
proach.
The work most similar to ours is found in the so-
lutions to License Plate Recognition (LPR) problem
(Shapiro et al., 2006) (Shapiro and Gluhchev, 2004)
(Yan et al., 2001) which also addresses the three sub-
problems together. There are special constraints in
the LPR problem which do not hold in our problem
e.g. we have a larger variation of affine transforma-
tions (scale and rotation) for street plates (Figure 2).
In addition, our approach deals with the detection and
recognition problems in a more general way which in
principle allows it to detect and recognize any specific
object, logo or sign.
There have also been successful solutions to the text
detection problem (Ye et al., 2007) (Kim et al., 2003)
(Merino and Mirmehdi, 2007) which do not provide
any solution to the recognition part. The approach
to the text detection problem presented in (Merino
and Mirmehdi, 2007) is very similar to ours. How-
ever, their method does not recognize the detected
text. Some other published text detection methods
require the text regions to have very specific charac-
teristics to work well (Kim et al., 2003) e.g. sharp
edges, good resolution, constraints on where the text
is located etc. Therefore, they have limited use, such
as detection of subtitles or rendered text on still im-
ages and video sequences and thus, are not appli-
cable in general outdoor scenarios. Some success-
ful solutions to the recognition problem in contexts
related to ours have been presented that either as-
sume the detection phase a solved problem (Ataer
and Duygulu, 2007) (Ganapathi and Lourde, 2006)
or use specific constraints e.g. high resolution (Ataer
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE
RECOGNITION APPROACH
347
(a) (b) (c) (d)
Figure 2: The database contains a wide variety of outdoor images each of which contains a street plate inside and comes with
3 different viewpoints {-45, 0, 45} and 3 scales {large, medium, small}. So, for each street plate we have 9 images in the
database. Range of viewpoint and scale variation is represented by these four pictures.
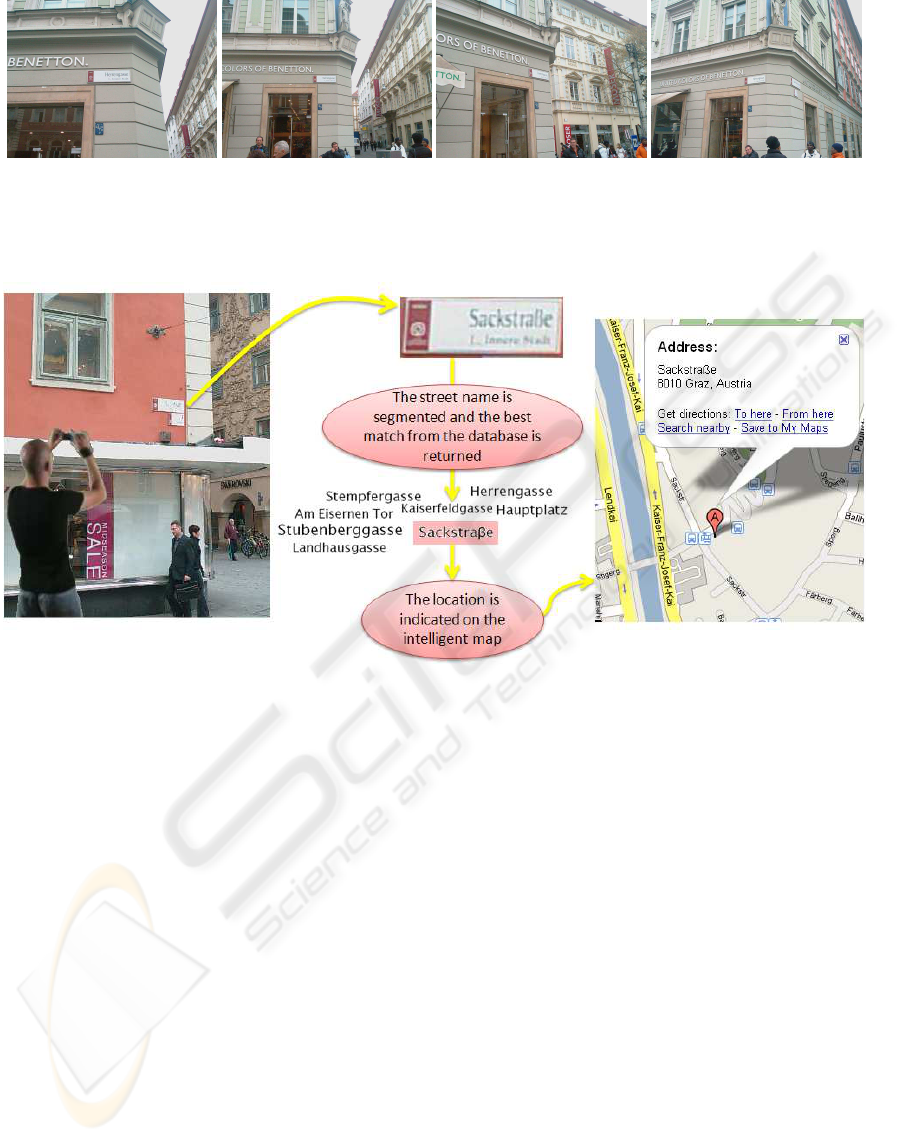
Figure 3: User takes an image from an urban place using his/her mobile phone and sends it to a server. Some target objects
within the image are detected (the street plate) such that location of the person can be identified by recognizing some uniquely
discriminant sign within the detected area of interest (the street name).
and Duygulu, 2007) and limited affine transforma-
tions of text (Ataer and Duygulu, 2007) (Ganapathi
and Lourde, 2006). Hence, these methods still need
to be combined to detection methods to be able to per-
form well in more general cases.
To the best of our knowledge there is no method that
can provide an efficient solution to the three men-
tioned tasks simultaneously in the full generality and
scale of our problem.
2 METHODOLOGY AND
FRAMEWORK
2.1 Detection Phase
Adaboost (Freund and Schapire, 1995) has been
proven to be fast and accurate for structural object de-
tection problems. It is an algorithm for constructing
a strong classifier as a linear combination of simple
features, called weak classifiers. For general object
detection Haar features have been used as weak clas-
sifiers(Papageorgiou et al., 1998). These features can
be defined as the difference of the sum of pixels of
areas inside windows, which can be at any position in
the original image and have different scales, see Fig-
ure 4 for examples. Viola and Jones (Viola and Jones,
2001) introduced integral images as a fast method to
calculate the difference of the sum of pixels.
To detect street plates in outdoor images we use
adaboost in a similar way as in (Viola and Jones,
2001) where it was used for detecting faces. To train
the adaboost we need positive and negative samples.
As positive samples we consider rectangular regions
of the image containing only a plate. To get them we
annotate all the images in the database. Later we will
use half of the images in the database for training the
adaboost and the rest for test, but we need to annotate
all images to evaluate how detected windows inter-
sect true plate regions. The annotation consists of the
coordinates of the four corners of the polygonal plate
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
348

Figure 4: Representative of Haar feature samples.
(a)
(b)
Figure 5: Database annotation: (a) shows how images are
annotated. (b) several samples of segmented plate regions
from images with different views and scales. We use these
segmented regions as positive samples for training.
region, as is shown in Figure 5.a.
As illustrated in figure 5.b many plate regions
are not rectangular because of choice of viewpoints.
Therefore, we apply a set of affine transformations
to the whole image to approximately fit the plates to
an axis parallel rectangular region. These transfor-
mations are different in the sense of scale and an-
gle. We cover 5 different scales and 7 different an-
gles to make our detector invariant to viewpoint and
scale. Obviously, this may cause a loss of some part of
the plate region border or bring in a few pixels from
the background. Anyway we use these rectangular
plate regions as positive samples in training the ad-
aboost. To obtain negative samples a fixed window is
slid over each image in the training database without
overlapping. We exclude those windows that inter-
sect plate regions. In our experiments we have used
approximately 100 positive and 7000 negative sam-
ples for initial training of the adaboost. We normalize
all samples by re-scaling them into a fixed size win-
dow 20×70 and also normalize the pixel intensities by
converting the values to the interval [0, 1]. Now we
can apply this adaboost on the test images to detect
candidate plate regions in the entire image. Figure 6
shows an example of the initial adaboost result. As
is illustrated in the figure, we indeed detect plate re-
gions, but at the same time many non-plate regions
are labeled as plates (false positives).
Figure 6: The initial boosting has lots of false positives. We
use these detected windows to enrich our training database.
Improvement by Generating More Training Data.
To decrease the number of false positives we increase
the number of training samples. This idea is not new
and has been applied for texture classification and ob-
ject detection (Laptev, 2006) (Tavakoli et al., 2008).
In previous work it is shown that the adding more
training data by generating new images increases de-
tection performance. Here to add new positive and
negativesamples to the training data, we apply the ini-
tial adaboost on the training images instead of the test-
ing images. We then analyze the detected windows as
follows. If they have more than 80% overlap with a
plate region we add them to positive samples and and
if they have less than 30% overlap they are added to
the negative samples. The overlap is checked using
the annotation information. The result of this sample
generation procedure is adding 10000 negative and
500 positive samples to our training set. Therefore,
the final boosting is trained with this enriched set of
training samples. To try the final adaboost to each test
image of the database, we first apply a set of affine
transformations by resampling the entire images at
varying scales and angles. Then we perform the ad-
aboost on the set of transformed images. By applying
these transformations the adaboost will detect plates
at different slopes and scales.
Figure 7: Most of remaining false positives are quite similar
to the plates and we can not expect adaboost to distinguish
it.
Even after applying the final boosting, we still
have some false positives. However, many of these
false positives are structurally similar to the target ob-
jects and are not supposed to be removed in the cur-
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE
RECOGNITION APPROACH
349

rent boosting stage (Figure 7). In the next section you
will see how these false positives can be removed by
applying a filtering method.
2.1.1 Filtering False Positives
The remaining false positives have similar structure,
so not surprisingly they also have similar Haar feature
responses. Therefore, a new feature is required to dis-
criminate the true positives that contain a text region
from the false positives. Apart from shape features
texture information reflects small scale structures
such as in regions containing text. There is an abun-
dance of texture descriptors in the literature, for ex-
ample various linear filters, wavelets, co-occurrence
matrices, energy measures from the Fourier trans-
form, Markov random fields, local binary patterns,
and texton histograms. Some of these could be used
in our case. However,several of them, for instance the
filters, respond to brightness edges which is not suit-
able in outdoor images. We applied also the fast com-
puted descriptors based on LBP (Ojala et al., 2002)
to our plate detection problem but it turned out that
lots of false positives remained after filtering with that
method. We therefore went for yet another method.
LU-transform and Filtering. In recent work
Tavakoli Targhi et. al. proposed a fast and simple tex-
ture descriptor, called the Eigen-transform (Tavakoli
et al., 2006). The texture descriptor is derived from
image matrix decompositions. It has a number of
properties which are desirable for bottom up process-
ing in real-world applications. It captures small-scale
structure in terms of roughness or smoothness of the
image patch and unlike most other texture descrip-
tors, it does not generate spurious responses around
brightness edges. Also it is not sensitive to changes in
brightness. It is fast to compute and provides a com-
pact representation which is easy to store and perform
calculations on. Finally almost no parameters need to
be tuned.
The basic idea of Eigen-transfrom is to compute
the singular values or eigenvalues of matrices repre-
senting the local neighborhoods of a pixel and form a
descriptor as the average of the smallest of their abso-
lute values. This yields a one-dimensional descriptor
which fires in ”rough” areas of the image. The de-
scriptor is computed for all pixels or on a sub-sampled
regular grid. In (Tavakoli et al., 2006) it is shown that
similar descriptors can be computed by any form of
triangulation of the image patch matrix, such as by the
LU-transform, which is rather fast. Mirmehdi and his
co-workers (Merino and Mirmehdi, 2007) used this
texture descriptor to track text regions in outdoor im-
ages. Their results demonstrated that the method ef-
ficiently can detect text in real time applications and
motivated us to use it to filter the false-positive win-
dows.
In filtering we use the LU-transform to detect tex-
tured areas in the candidate regions under the assump-
tion that these contain text. Figure 8 illustrates the
output from a plate region. We see that the text re-
gions pop out from the background as desired. Hence,
we apply the LU-transform on all the (positive and
negative) samples of the training set. Then we train
a new adaboost on the transformed samples. We use
the same methodology as we used before to train ad-
aboost on transformed windows, that is we extract
Haar features from transformed samples instead of the
original ones. We call this the adaboost-filter. We also
add this step to our testing. More specifically, for ev-
ery test input image we apply the adaboost to discrim-
inate between true and false positives. To filter the
false positives we then perform the LU-transform on
each detected window and finally apply the adaboost-
filter. As a result of the filtering step we have less than
two false positives on average for each test image. As
we will see below these false positives will in general
automatically be filtered in the recognition phase.
Figure 8: Result of LU-transform on a plate region.
2.1.2 Final Decision
As we mentioned before, to make our method affine
invariant, each input image is transformed by differ-
ent affine functions like rotation and scale. Then we
apply the detection separately on each of these trans-
formed images. Therefore we have several detection
windows of each plate. So we need to merge the over-
lapping detected windows which are close enough to-
gether. To do this, we use a threshold on the minimum
of the four euclidian distances between correspond-
ing corners of the windows. This threshold can be
between 100 to 300 pixels.
To evaluate the detection accuracy we define a
confidence value for each detected window. Number
of windows merged together is considered as the con-
fident of each merged region. Also the overlap of the
detected windows is computed by (1).
overlap =
S
ground−truth
T
S
detected−window
S
ground−truth
S
S
detected−window
(1)
Where S
ground−truth
is the area of the whole plate
in the ground-truth and S
detected−window
is the area of
the detected window. The overall detection rate is
92% with 40% overlap and confidence value 2. In
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
350
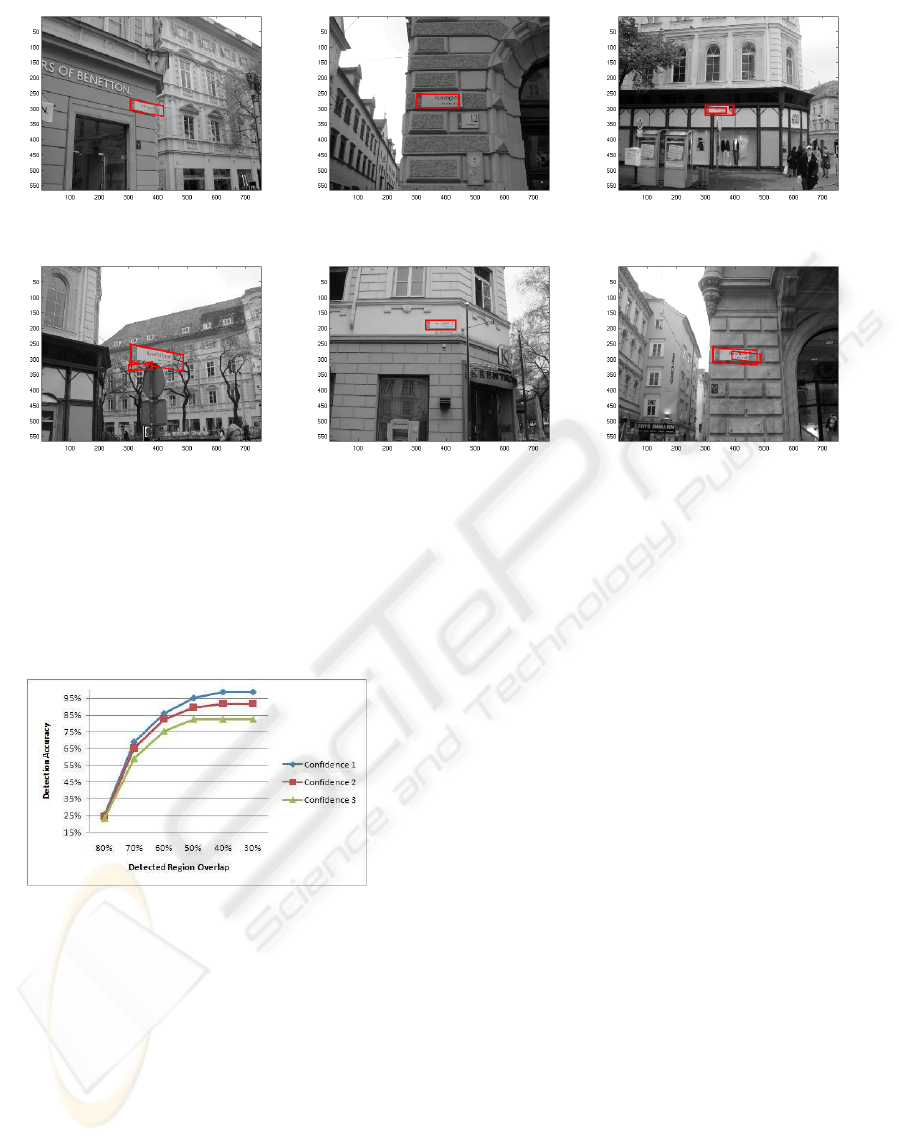
(a) (b) (c)
(d) (e) (f)
Figure 9: Some sample images after filtering. As you see, even after filtering, there may remain some false positives which
are almost guaranteed to be removed in recognition phase.
average the detection phase returns two candidate re-
gion at the end, one of which is always the plate. The
remaining false-positive will be rejected in the recog-
nition phase since no text match it.
Figure 10: Detection rate for required overlap and confi-
dence. Different curves show the detection results for dif-
ferent confidence values.
Figure 9 shows how the final detection procedure
performs after making the final decision.
2.1.3 Text Segmentation
In the previous section we explained how we detect
plates. For recognizing the street name we need to ex-
tract the text information from the plate region. This
is not a straightforward task because candidate win-
dows resulting from the detection phase don’t fit ex-
actly to the borders of the plates. One of the main
reasons is perspective effects which cause detection
windows to be wider (or narrower) than the actual
plate when pictures are taken from different view-
points. Therefore, there is a need to have a more ac-
curate segmentation method to extract the text regions
inside a roughly detected plate region. Our text seg-
mentation strategy is based on a pixel-wise classifica-
tion and segmentation method called single histogram
(Schroff et al., 2006) which use histograms of visual
words (or textons) as feature vectors. Histograms
of visual words (Varma and Zisserman, 2003) have
been effective in tasks such as image classification
and object class recognition. The single-histogram
approach represents each object class by a single his-
togram from visual words unlike the common way
in which each object class is represented by a set of
histograms. Classification is achieved by k-nearest
neighbor search over the exemplars. This method
perform simultaneous pixelwise segmentations and
recognition of image regions. We here consider the
single-histogram approach as a two class problem
namely the text regions containing street names and
the rest of plate region (background of the street
name).To train the classifier we generate training data
by manually segmenting all street names in the train-
ing images by drawing a bounding box around the
street name region. Figure 11.a illustrates the man-
ual segmentation.
Then we extract the feature vectors densely at
each pixel location which here are raw 5 × 5 gray-
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE
RECOGNITION APPROACH
351

(a) (b) (c)
Figure 11: Segmentation scheme: (a). Original street plate
with annotation bounding box, (b) probability map, (c)
pixel-wise segmentation.
scale intensity patches. Thus, the dimensionality of
the feature vectors is 25. During training, the vocabu-
lary of visual words is built by clustering (performed
by K-means) the feature vectors extracted from the
training street name regions. We associate each pixel
in the training images with the closest visual word
(cluster center). Finally, we compute histograms of
visual words for each of the training regions and com-
bine them together to produce a single model for text
regions corresponding to street names.
During testing an input plate region image is con-
verted into its corresponding texton map by labeling
each pixel. Then pixelwise classification is obtained
by a sliding window technique. A window of dimen-
sion 9 × 9 is slid across the plate region to generate
a histogram of visual words for each position in the
plate region. The center pixel is then assigned a value
which is a distance between the histogram at the pixel
and single histogram of text region model. Since we
here have only one object class, we build a probabil-
ity map which represents the distance from each pixel
in the plate region to the model. This is illustrated in
Figure 11.b. To end up with an accurate and coher-
ent text segment, we merge those pixels which have
high probability values in the map. This is done by
Connected Component (CC) extraction methods. We
apply an algorithm that has been used in (Leon et al.,
2005) for text detection where the Connected Com-
ponent are reconstructed at multiple gray scales. We
similarly define multiple thresholds and apply them
on the result of the single-histogram classification.
To remove the small text region which often contains
some information about the city area, we simply use
a threshold. An example of the final segmentation re-
sult after finding the Connected Component is given
in Figure 11.c. We finally fit the segmented text re-
gion in a bounding box that will be used for recogni-
tion which will be explained in the next section.
2.2 Recognition Phase
The detection phase provides us with a set of candi-
date regions for which we know that they in over 98%
of the cases contain a target plate with at least 40%
of overlap (see Figure 10). Hence, we are given a
number of cropped regions that likely contains text
representing a street name. In order to recognize the
text in such an image (region) one can either apply a
character recognition approach or a direct matching
technique. The latter approach of course requires that
the texts that could appear in the images are known
beforehand, which we indeed do in our case. Since
our images of the plates often are noisy and low qual-
ity it is difficult to find individual characters in them.
Therefore, we preferred to use image matching ap-
proaches. Such methods can be based on extracted
features. In particular SIFT-features are considered
to be powerful. We applied such techniques, but al-
though we could achieve acceptable accuracy in that
way the method turned out to be extremely sensitive
to parameter selection, noise and other changes in the
test images. As a consequence we instead exploited
Dynamic Time Warping (DTW), (Sakoe and Chiba,
1990), which is a technique that has been used with
success in speech recognition problems.
This method works by simultaneously modifying the
1D test signal by compressing and extending inter-
vals on which it is defined and measuring its similar-
ity to a reference model signal. The total matching
cost is defined by combination of the cost of the inter-
val modification with a measure of similarity between
the obtained test signal and the reference.
DTW as used in speech recognition works on 1D
signals, while here we have images. To adapt our
problem to DTW, we extract vertically projected fea-
tures from the image and consider them as a 1D signa-
ture along the text length (Shanker and Rajagopalan,
2007) (Rath and Manmatha, 2003). Experimentally
we found that the sum of pixel intensities along the
columns of the image were sufficiently informative.
Upper or lower contours of each column can be use-
ful as well and gave even more discriminative feature
vectors. In fact there are even more sophisticated pro-
jected features such as HOG descriptors (Dalal and
Triggs, 2005), but the three features mentioned in our
experiments sufficed for acquiring perfect matching
accuracy. Figure 12 shows the sum of intensities and
upper contour features for a sample text image. It is
worth noting that we also needed to perform certain
normalization and preprocessing tasks, but we don’t
go into detail about these rather straightforward tasks.
The matching results in our application were gen-
erally very good. However, we often also have a
rough estimate of our location in the map. For in-
stance it can be obtained from the mobile phone.
Based on (Ratti et al., 2007), there is one transceiver
antenna every 100-300 meters in urban places, though
this distance increases to several kilometers in ru-
ral areas. Therefore, the number of possible street
names in practice is very limited - only a few tens.
To investigate the matching performance we there-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
352

Figure 12: Topmost is a sample text image; in the middle,
sum of intensity values are showed; and at the bottom you
see upper contour of the text.
(a) Misclassified samples: Hauptplatz, Mur-
gasse, Sackstraβe respectively
(b) High quality sample images: Hans-Sachs-
Gasse, Sporgasse respectively
(c) Hard samples: Am Eisernen Tor, Jungfern-
gasse, Hauptplatz respectively
Figure 13: For 1000 extra text models, as showed in Figure
14, recognition accuracy descends to 96.51% which means
three false samples. (a) shows those three samples. (b) rep-
resents some high quality samples which can probably be
recognized by OCR methods as well. (c) contains some
hard samples that are recognized correctly by our method
but are evidently very hard to be recognized by character
recognition based methods.
fore also tested the approach on larger sets. It turned
out that with up to a hundred real street names we
could not observe any considerable decrease in accu-
racy. An experiment performed on one hundred real
street names around Herrengasse street in Graz city
resulted in three misclassifications. To provide an in-
sight into the three incorrectly classified samples we
depict them in Figure 13.a.
We note that the samples are of low quality and
only with difficulty readable to a human. A simu-
lated experiment performed on a dictionary of 5000
English words showed that the matching accuracy re-
mained high also on such a large database, see Figure
14.
The figure shows that for 1000 extra models, the
accuracy is 96.51% which means that only the three
samples were matched incorrectly. Therefore, we
conclude that the critical parts of the problem are
found in the detection and text segmentation steps.
A strong point of this method is that it has no need
Figure 14: Text image matching accuracy over increasing
number of reference models.
Figure 15: Automatically generated street name models. As
we did not have the exact font used in our plates, differ-
ent similar fonts were tested but it has no sensible effect on
recognition results.
for reference models from real images. The only in-
formation used is a database containing a list of the
street names in text format. By inputting this list to
an image editor we artificially generate our text mod-
els, see Figure 15 for an example.
It turns out that the method to a great extent is in-
variant to the selection of the fonts used to generate
text models. Furthermore, the method is extremely
fast and needs only m × n × d operations where m,
n, d respectively stand for the length of test text, the
length of reference text, and the number of projected
features. In all this method has applications beyond
the one studied here. It should be added that remain-
ing false positives (if any) generally are rejected in the
recognition stage. Again we want to stress that our
experiments show that the recognition phase works
almost perfectly if segmentation of the text areas is
appropriate.
3 APPLICATION AND SYSTEM
USAGE
The methods we utilized for both detection and recog-
nition part are useful in different types of applications
and can be used as a stand alone module in place
recognition and urban area visit aid scenarios. For
most visitors of a new city it is of value to be able
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE
RECOGNITION APPROACH
353
to find their path through streets and also find desired
markets, hotels and restaurants around them. Google
has developed a mobile friendly version of its map
which can be downloaded for an increasing number
of cities world wide. Installing a map on your mobile
phone you would be able to track your paths. How-
ever, these maps need somehow well formatted input
hints about the location to start the search to provide
you with the required information.
For most cell phone users is not convenient to enter
name of the target location with the keypad. This
problem becomes much more sophisticated when you
need to locate yourself by looking at the street plates
nearby. Yet more complicated is the case where you
are in a country with an unfamiliar alphabet like Chi-
nese or Arabic. An effective way of doing this, is
to take a photo of the plate and extract the informa-
tion from the image as shown in this paper. Since we
are using image matching for recognition part, our ap-
proach can be used for any plate or sign with different
alphabet and characters.
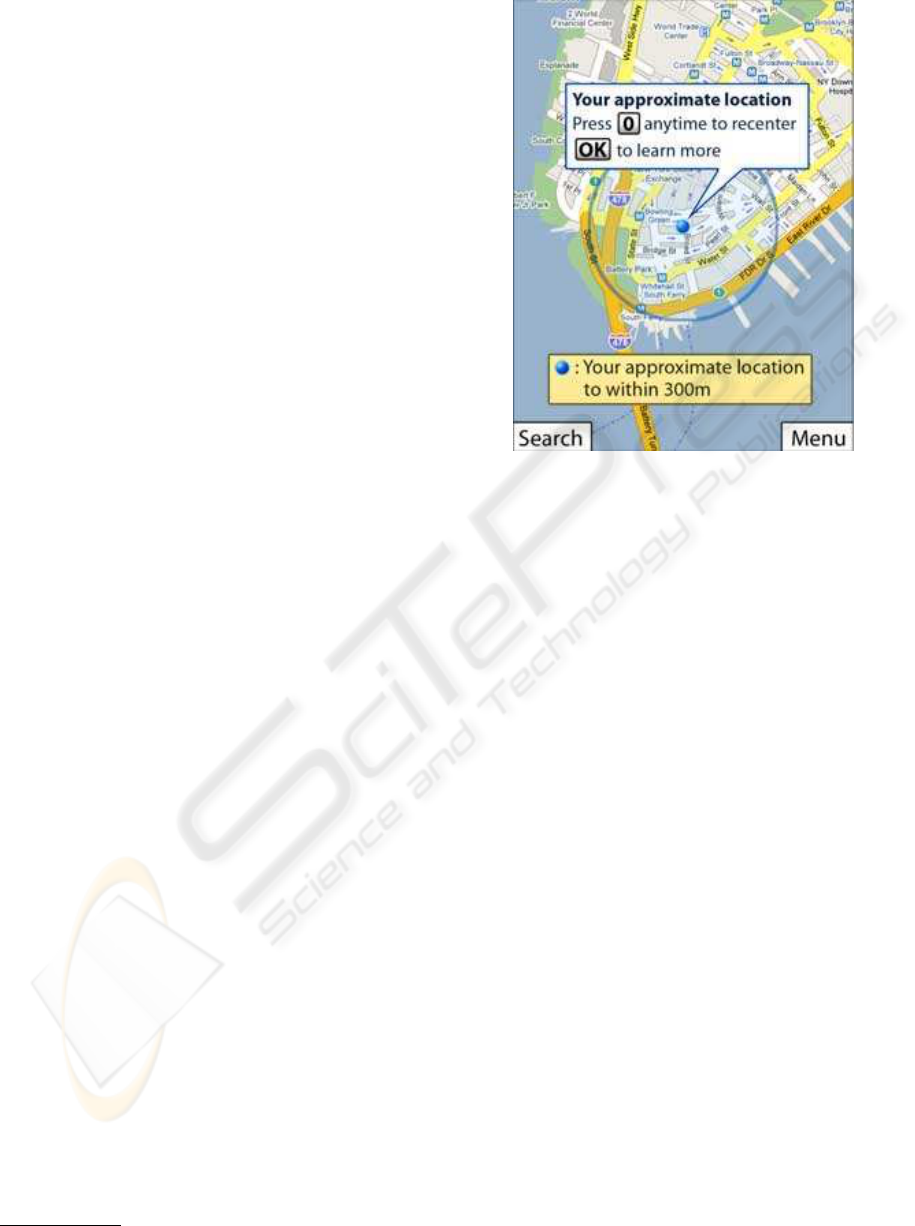
Recently Google has released a software named
My Location
3
which can estimate position of a cell
phone user by just a simple packet of data transferred
between the cell phone and connection service tow-
ers around (Figure 16). This estimate, though goes
far rough (up to 5000 meters) in unsettled places, de-
pends on concentration of cell phone towers around.
In urban areas density of the towers is high enough to
assure an accuracy while GPS information is not al-
ways available nor accurate, especially in high density
aria. Integration of our plate detection and recognition
system with available functions like My Location will
result in a quite user friendly and applicable device.
The overall processing time of our system is less than
10 seconds per image (independent of picture size).
4 CONCLUSIONS
In the paper we have presented a method for detect-
ing and recognizing street name plates with applica-
tions to urban navigation and map indexing by mobile
users, e.g. when the images are acquired by a mobile
phone. We use a generic approach to structural object
detection and recognition. A structured object is de-
tected using a boosting approach and false positives
are filtered using a specific method called the texture
transform. In a second step the subregion contain-
ing the key information, here the text, is segmented
out. Text is in this case characterized as texture and
a texton based technique is applied. Finally the texts
3
www.google.com/gmm
Figure 16: As an estimate, Google draws a circle on the map
of user’s cell phone, highlighting where the user probably
is.
are recognized by using Dynamic Time Warping on
signatures created from the identified regions. The
recognition method is general and only requires text
in some form, e.g. a list of printed words, but no im-
age models of the plates for learning. Therefore, it
can be shown to scale to rather large data sets. More-
over, due to its generality it can be applied to other
problems, such as logo and sign recognition. The de-
tection step relies on knowledge about the appearance
of street signs. However, the boosting approach also
can be applied to other cases as long as the target re-
gion is structured in some way.
In the experiments we obtain over 91% overall de-
tection and recognition accuracy on 100 test images
containing street plates from the city of Graz. The re-
sults show that the detection phase is the most crucial
and also time consuming part. The overall speed has
not yet been a major concern and presently the whole
system requires slightly less than 10 second per im-
age, of which segmentation and recognition takes less
than one second. We used a desktop PC with 3.2 GHz
CUP and 2 GB memory. The detection, as the first
step, is of major importance and needs to be as accu-
rate and robust as possible. So, continued efforts are
on speeding-up this part without loss of accuracy. The
recognition method we utilized turned out to be accu-
rate enough, even if we have 1000 reference models.
However in practice we can in our application limit
this number to about 50 by estimating the location of
the mobile device. This would give an overall recog-
nition rate of almost 100 percent.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
354

ACKNOWLEDGEMENTS
The reported work has been performed within the EU-
IST project MOBVIS, FP6-511051. This support is
gratefully acknowledged.
REFERENCES
Adamek, T., OConnor, N., and Smeaton, A. (2007). Word
matching using single closed contours for indexing
handwritten historical documents. In International
Journal on Document Analysis and Recognition.
Ataer, E. and Duygulu, P. (2007). Matching ottoman words:
an image retrieval approach to historical document in-
dexing. In Proc. ACM international conference on Im-
age and video retrieval.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Proc. Computer Vision
and Pattern Recognition.
Freund, Y. and Schapire, R. (1995). A decision-theoretic
generalization of on-line learning and an application
to boosting. In Proc. European Conference on Com-
putational Learning Theory.
Ganapathi, T. and Lourde, R. (2006). Thresholding and
character recognition from a digital raster image. In
Proc. International Confrence on System of Systems
Engineering.
Ishidera, E., Lucas, S., and Downton, A. (2002). Likeli-
hood word image generation model for word recog-
nition. In Proc. International Conference on Pattern
Recognition.
Kim, K., Jung, K., and Kim, J. (2003). Texture-based ap-
proach for text detection in images using support vec-
tor machines and continuously adaptive mean shift al-
gorithm. In IEEE Transactions on Pattern Analysis
and Machine Intelligence.
Laptev, I. (2006). Improvements of object detection using
boosted histograms. In Proc. British Machine Vision
Conference.
Leon, M., Mallo, S., and Gasull, A. (2005). A tree
structured-based caption text detection approach. In
In Fifth IASTED VIIP.
Merino, C. and Mirmehdi, M. (2007). A framework towards
realtime detection and tracking of text. In Interna-
tional Workshop on Camera-Based Document Analy-
sis and Recognition.
Ojala, T., Pietikinen, M., and Menp, T. (2002). Multireso-
lution gray-scale and rotation invariant texture classi-
fication with local binary patterns. In IEEE Transac-
tions on Pattern Analysis and Machine Intelligence.
Papageorgiou, C., Oren, M., and Poggio, T. (1998). A gen-
eral framework for object detection. In Proc. Interna-
tional Conference on Computer Vision.
Rath, T. and Manmatha, R. (2003). Word image matching
using dynamic time warping. In Proc. Computer Vi-
sion and Pattern Recognition confrence.
Ratti, C., Sevtsuk, A., Huang, S., and Pailer, R. (2007). Mo-
bile landscapes: Graz in real time. In Location Based
Services and TeleCartography.
Sakoe, H. and Chiba, S. (1990). Dynamic programming
algorithm optimization for spoken word recognition.
In Readings in speech recognition.
Schroff, F., Criminisi, A., and Zisserman, A. (2006). Single-
histogram class models for image segmentation. In
Computer Vision, Graphics and Image Processing.
Shanker, A. and Rajagopalan, A. (2007). Off-line signature
verification using dtw. In Pattern Recognition Letters.
Shapiro, V. and Gluhchev, G. (2004). Multinational license
plate recognition system: Segmentation and classifi-
cation. In Proc. International Conference on Pattern
Recognition.
Shapiro, V., Gluhchev, G., and Dimov, D. (2006). Towards
a multinational car license plate recognition system.
In Machine Vision and Applications.
Tavakoli, A., Bjrkman, M., Hayman, E., and Eklundh,
J. (2006). Real-time texture detection using the lu-
transform. In In Workshop on Computation Intensive
Methods for Computer Vision.
Tavakoli, A., GeuseBroek, J., and Zisserman, A. (2008).
Texture classification with minimal training images.
In Proc. International Conference on Pattern Recog-
nition.
Varma, M. and Zisserman, A. (2003). Texture classification:
Are filter banks necessary? In Proc. Computer Vision
and Pattern Recognition confrence.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proc.
Accepted Confrence on Computer Vision and Pattern
Recognition.
Yan, D., Hongqing, M., Jilin, L., and Langang, L. (2001).
A high performance license plate recognition system
based on the web technique. In Proc. Intelligent
Transportation Systems confrence.
Ye, Q., Jiao, J., Huang, J., and Yu, H. (2007). Text detection
and restoration in natural scene images. In Journal of
Visual Communication and Image Representation.
READING STREET SIGNS USING A GENERIC STRUCTURED OBJECT DETECTION AND SIGNATURE
RECOGNITION APPROACH
355
