
INSCRIBED CONVEX SETS AND DISTANCE MAPS
Application to Shape Classification and Spatially Adaptive Image Filtering
Fr
´
ed
´
erique Robert-Inacio
IM2NP - UMR CNRS 6242, ISEN-Toulon, Place Pompidou, Toulon, France
Keywords:
Distance map, Inscribed convex set, Shape classification, Similarity parameter, Spatially adaptive filtering.
Abstract:
This paper presents two original applications related to discrete distance maps. Based on the relation linking
inscribed convex sets and discrete distance maps, the first application is a spatially adaptive filtering method
which is set up for both grey-level and color images. This spatially adaptive filter is really efficient in perfor-
mances and computation time. Furthermore a new mean of computation for the Asplund distance as well as
a method for determining the similarity degree between shapes are also presented. The similarity parameter
enables a quantitative shape classification with respect to a set of reference shapes.
1 INTRODUCTION
The discrete distances are widely used in image pro-
cessing. For example, they can be used to determine
Vorono
¨
ı diagram around objects or the medial axis
and skeleton of a shape and so on, as well as they can
achieve elementary morphological operations such as
dilation or erosion (Soille, 1999)(Borgefors et al.,
1999) in 2D or in 3D. But another kind of information
in relation with inscribed convex sets can be extracted
from distance maps.
This paper deals with two of the applications in-
volving inscribed convex sets: on the one hand, a spa-
tially adaptive filter is set up by determining a cus-
tomized filtering window size at each point of an im-
age in grey-levels or in color, and on the other hand,
a simplified method for the determination of the As-
plund distance and of a degree of similarity between
shapes is described.
2 DISCRETE DISTANCE MAPS
A discrete distance map (DDM) is computed from a
binary image including a background and one or sev-
eral objects. On the DDM, the distance to the nearest
object is estimated at each point of the background
and each point of the object set is set to 0. There exist
several algorithms evaluating the Euclidean distance
in a discrete space (Danielsson, 1980). But several
works presented discrete distances on Z
2
as approxi-
mations of the Euclidean distance, as described in the
following section.
2.1 Approximation of the Euclidean
Distance
At the beginning, discrete distances such as Man-
hattan distance or chessboard distance, were defined
in order to coarsely estimate the Euclidean distance
between points on a grid (Rosenfeld and Pfaltz,
1968)(Borgefors, 1986). These approximations were
refined by the elaboration of the chamfer distances.
Let us define the discrete distances.
Let A(x
A
, y
A
) and B(x
B
, y
B
) be two points of Z
2
.
The Manhattan distance is defined by:
d
Mh
(A, B) = |x
A
− x
B
| + |y
A
− y
B
| (1)
The chessboard distance is defined by:
d
Cb
(A, B) = max (|x
A
− x
B
|, |y
A
− y
B
|) (2)
Notice that d
Mh
(A, B) ≥ d
Cb
(A, B), ∀(a, B) ∈ Z
2
.
A family of discrete distances called chamfer dis-
tances also gives an approximation of the Euclidean
distance. The principle of computation for such dis-
tances is based on the determination of a minimal path
leading from A to B. This path is made of several ele-
mentary displacements, each of them being weighted.
Examples of weights for the main directions on the
grid are given in Fig. 1 and the corresponding estima-
tions of Euclidean distance values are given in Table
1.
60
Robert-Inacio F. (2009).
INSCRIBED CONVEX SETS AND DISTANCE MAPS - Application to Shape Classification and Spatially Adaptive Image Filtering.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 60-66
DOI: 10.5220/0001796200600066
Copyright
c
SciTePress
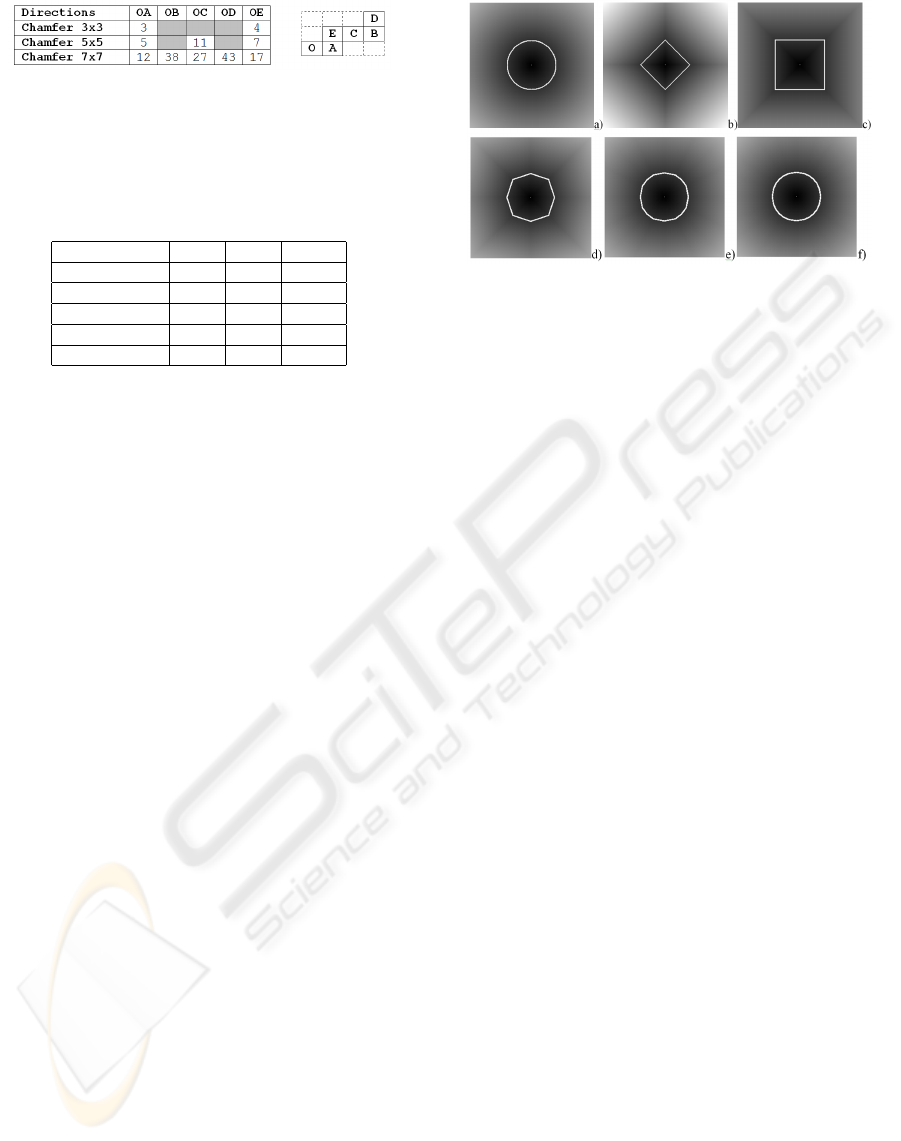
Figure 1: Weights and elementary displacements for the
chamfer distances with a neighborhood width of 3, 5 and
7.
Table 1: Distances from O for the chamfer distance with
different neighborhood widths.
Point/Width 3 5 7
A 1 1 1
B 10/3 16/5 19/6
C 7/3 11/5 9/4
D 11/3 18/5 43/12
E 4/3 7/5 17/12
The previous examples can be extended to an arbi-
trary dimension of neighborhood, in order to be more
accurate in the estimation of the Euclidean distance,
with the main drawback that it makes the computation
time increase.
2.2 Associated Convex Sets
Fig. 2 shows DDM computed from a binary image
containing a unique object: the center point. DDM
are given for the Euclidean distance and the discrete
distances defined above. Furthermore sets of equidis-
tant points to the object set at a distance of 50 are
drawn in white in Fig. 2. If we consider that the cir-
cle C
E
(M, R) of center M and radius R, is the set of
equidistant points from M at a Euclidean distance of
R, then, by extension, sets of white points of Fig. 2
are ”circles” of radius 50 for the corresponding dis-
tances. In this way, we can associate the shape of
these ”circles” with the corresponding distance. Ta-
ble 2 summarizes the correspondence. Note that all
of these shapes are regular. Fig. 3 presents an exam-
ple of inscribed ”circles” into a particular shape.
3 INSCRIBED CONVEX SETS
By definition a DDM gives at each point x of the
background its distance to the nearest object. In the
Euclidean case, if DDM(x) is the value reached at
point x, the disk D(x, DDM(x)) of center x and radius
DDM(x) is totally included in the background. Fur-
thermore DDM(x) is the distance from x to the object
set. That means that D(x , DD(x)) is the greatest disk
centered at x and totally included in the background.
This remark can be generalized to the convex sets as-
sociated with the discrete distances defined above. In
Figure 2: DDM for a) the Euclidean distance, b) the Man-
hattan distance, c) the chessboard distance, d) the 3x3
chamfer distance, e) the 5x5 chamfer distance and f) the
7x7 chamfer distance.
this way if X is the shape corresponding to a discrete
distance, X(x, DDM(x)) is the greatest homothetic set
of X centered at x and totally included in the back-
ground.
Let us now consider a set Y and compute a par-
ticular DDM by considering the outside of Y (or its
complementary set) as the object and Y as the back-
ground. The maximum value, DDM(x
max
), reached
on the DDM gives the scale ratio corresponding to an
inscribed set of shape X into Y . Thus, DDM(x
max
) is
the scale ratio applied to the shape X to obtain the in-
scribed homothetic set of X into Y , if we consider that
X is the reference shape at scale 1. Depending on the
shape Y , x
max
is unique or not, in other words, there
can exist several positions to center the inscribed ho-
mothetic set of X into Y .
4 SPATIALLY ADAPTIVE
FILTERING
4.1 Adaptive Sliding Window Size
Sliding windows used for filtering are generally
square-shaped and these squares are oriented at 0
o
.
But such squares are ”circles” for the chessboard dis-
tance. That is why we are going to use a DDM based
on the chessboard distance to design the sliding win-
dow associated with a given point. As the chess-
board DDM allows to determine the greatest homo-
thetic square totally included in the background, it is
sufficient to compute an appropriate binary image de-
scribing objects and background, in order to obtain
window sizes depending on the location and stored in
the DDM.
For grey-level images, the binary image can be
chosen as a thresholded gradient image (TG). In this
INSCRIBED CONVEX SETS AND DISTANCE MAPS - Application to Shape Classification and Spatially Adaptive
Image Filtering
61

Table 2: Correspondance between discrete distances and associated convex shapes.
Distance Euclidean Manhattan Chessboard Chamfer 3x3 Chamfer 5x5 Chamfer 7x7
Shape Circle Square (45
0
) Square (0
0
) Octagon Dodecagon 24-edge Polygon
a b c
d e f
Figure 3: Inscribed ”circles” for a) Euclidean, b) Manhattan, c) Chessboard, d) Chamfer 3x3, e) Chamfer 5x5 and f) Chamfer
7x7 distances.
way high frequency areas are preserved while homo-
geneous regions are smoothed. The threshold value is
chosen by taking into account the maximal amplitude
of noise that must be filtered.
For color images, we compute a color distance
map (CDM) that will be thresholded. This CDM is
derived from two color difference images. In other
words, the Euclidean distance between the color vec-
tor of point P(x , y) and those of its right neighbor
P
r
(x + 1, y) is computed on the original color image
to obtain the X-CDM. As well, the Y-CDM is ob-
tained by computing the Euclidean distance between
the color vector of P(x, y) and those of its top neigh-
bor P
t
(x, y + 1). A threshold value v is then chosen
according to the amplitude of noise to be filtered. Ac-
tually noise of amplitude lower or equal to th will be
removed whereas noise of greater amplitude will be
consider as relevant information. Thus the X-CDM
and Y-CDM are thresholded at v and the thresholded
CDM is obtained by mixing these two binary images
in order to keep all data representing high color dis-
tances.
Then the chessboard DDM is computed from one
of those binary images by considering points of high
frequency or of high color distance as the object set.
In this way, at each point of the background, the DDM
gives the half width of the maximal square totally in-
cluded in the background. If ww(P) is the maximal
window width at point P(x, y), ww(P) depends on the
location of P and it is the adaptive size of the sliding
window and:
∀P(x, y) ∈ Z
2
, ww(P) = 2 × DDM(P) + 1 (3)
Figure 4: Bit-mixing paradigm.
4.2 Median Filter
For grey-level images the median filter is achieved by
determining the median value for each sliding win-
dow. Let us note that a sliding window contains
ww(P)
2
points and that this number is an odd value.
Grey-level values belonging to a sliding window are
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
62

a b c d
Figure 5: Adaptive median filtering process: a) original image, b) thresholded CDM, c) chessboard DDM, d) filtered image.
a b
c d
Figure 6: Adaptive median filtering results for different values of th: a) th = 5, b) th = 10, c) th = 20, d) th = 30.
sorted and the median value is determined as the
ww(P)
2
+1
2
th
one.
Figure 7: Maximal window size according to th.
For color images (Robert-Inacio and Dinet, 2006),
it is not possible to sort color vectors as they belong
to Z
3
which does not have total order. So a bit-
mixing paradigm (Lambert and Macaire, 2000)(Fig.
4) is used in order to associate a 24-bit integer value
v
24
(r, g, b) to each RGB color vector (r, g, b). In this
way it is possible to arrange in order color vectors of
the sliding window according to their v
24
(r, g, b), and
then, to determine the median value. This way to sort
colors can be unsatisfactory from a theoretical point
of view, but it gives efficient results in practice. Fig.
5 shows the whole process on a color image.
INSCRIBED CONVEX SETS AND DISTANCE MAPS - Application to Shape Classification and Spatially Adaptive
Image Filtering
63

a b
c d
Figure 8: Median filtering results for different window widths: a) 3x3, b) 5x5, c) 7x7, d) 9x9.
4.3 Experimental Results
Fig. 6 shows filtered images obtained for 4 differ-
ent threshold values of the CDM. We can note that
some degradation in hair areas. The maximal size for
sliding windows is respectively of 17, 25, 33 and 33
for th = 5, 10, 20 or 30. Fig. 7 shows the evolution
of the maximal window size according to the thresh-
old value of the CDM, for this particular image. The
higher th, the smoother the result, with the drawback
of loosing relevant information. Fig. 8 shows the
rapid degradation of the filtered image in case of fixed
window size on the whole image.
5 SHAPE CLASSIFICATION
Shape classification can be achieved by using qual-
itative or quantitative tools. In the second case, the
classification is made with respect to one or several
criteria. In order to do that, shape parameters or dis-
tance between shapes can be used. In this section,
we recall the definition of the Asplund distance be-
tween shapes and of a similarity parameter estimating
the degree of likeliness of the shape under study to a
reference shape.
5.1 Asplund Distance
The Asplund distance (Serra, 1988)(Robert-Inacio,
2007) between two compact sets X and Y of R
2
,
d
A
(X,Y ), is defined by:
d
A
(X,Y ) = ln
k(X,Y )
K(X,Y )
(4)
where:
k(X,Y ) = in f {k > 0,Y ⊂
t
k.X} (5)
K(X,Y ) = sup{k > 0, k.X ⊂
t
Y } (6)
⊂
t
means that it exists x ∈ R
2
such that x + X ⊂
Y . In other words, k(X,Y ) is the scale ratio so that
k(X,Y ).X is circumscribed to Y and K(X ,Y ) is the
scale ratio so that K(X,Y ).X is inscribed into Y . We
can also remark that:
K(X,Y ) = k(Y, X) (7)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
64
5.2 Similarity Parameter
The similarity parameter SP is defined for any pair of
convex sets X and Y of R
2
by the following formula
(Robert, 1998)(Robert-Inacio, 2007):
SP(X,Y ) =
k(X,Y )
k(Y, X)
.
µ(X)
µ(Y )
(8)
where µ is the surface area measure.
5.3 Implementation
In this section, let us consider the case where X is a
”circle” for a discrete distance. It is then very easy to
determine the ratio to inscribe X into Y , by computing
the corresponding DDM inside Y . In this case, the
maximal value is k(X,Y ).
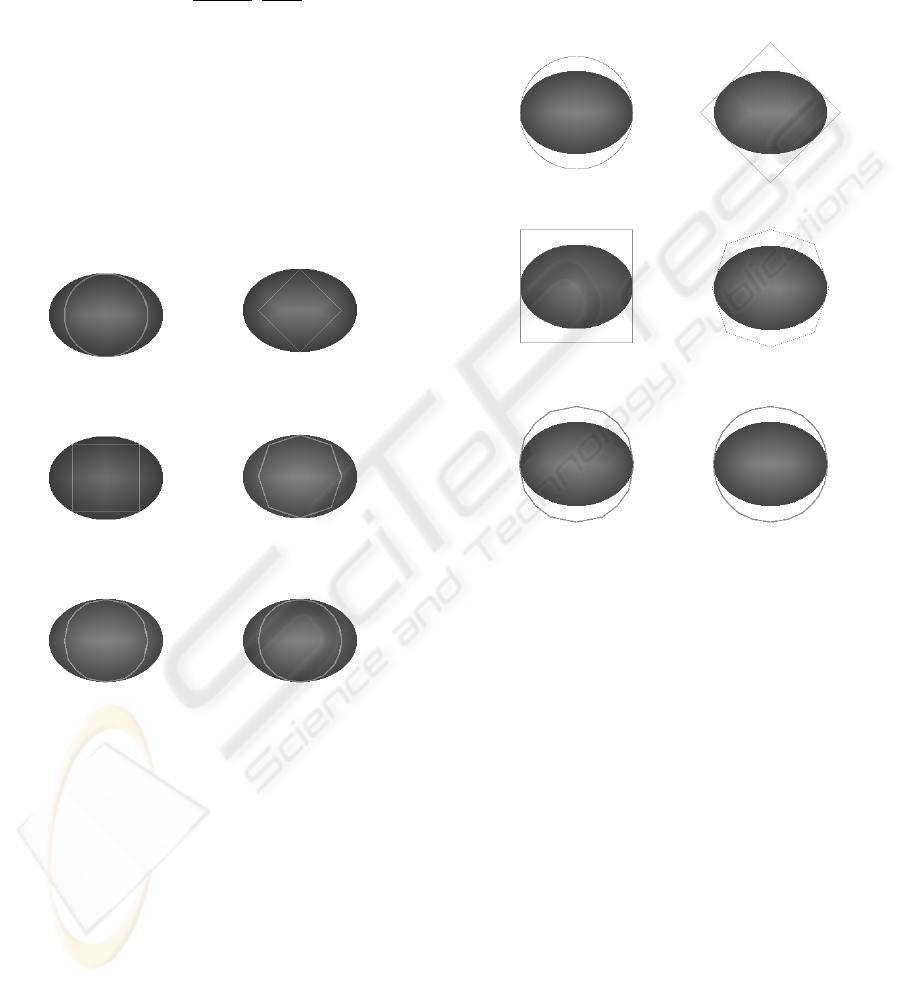
a b
c d
e f
Figure 9: Inscribed ”circles” for a) Euclidean, b) Manhat-
tan, c) Chessboard, d) Chamfer 3x3, e) Chamfer 5x5 and f)
Chamfer 7x7 distances.
DDM can also be useful in the particular case
where Y is symmetrical with respect to a point c. In
this case the center point c is the center of the homo-
thetic set of X , circumscribed to Y . It is then suffi-
cient to compute another DDM by considering a set
object reduced to c, DDM(c). And the maximal value
reached on the boundary of Y by DDM(c) is the scale
ratio to apply to X (shape at scale 1) so that it is cir-
cumscribed to Y . In other cases algorithms such that
the circumscribed disk algorithm and its extension to
convex sets must be used. Fig. 9 and 10 illustrate the
computation of inscribed and circumscribed convex
sets X in the case where Y is convex and symmetrical.
We can note that the circumscribed disk algorithm
and its extension to convex sets and the DDM can be
extended to the third dimension (Jones et al., 2006).
Furthermore other distance maps can generate other
”circles” and then comparison to these new shapes
can be achieved (Strand et al., 2006).
a b
c d
e f
Figure 10: Circumscribed ”circles” for a) Euclidean, b)
Manhattan, c) Chessboard, d) Chamfer 3x3, e) Chamfer 5x5
and f) Chamfer 7x7 distances.
6 CONCLUSIONS
Applications involving discrete distance maps are nu-
merous and most of them are related to mathemati-
cal morphology. In this paper we have presented a
spatially adaptive median filter using discrete distance
maps in order to determine the greatest size of sliding
window at each point of the image. This filter enables
a better smoothing of quite homogeneous areas while
preserving regions where gradient or color distance is
relevant. This method gives satisfactory results.
In a second time, we have described an application re-
lated to shape classification. Discrete distance maps
can be used in this case, if one of the shapes to com-
pare is a ”circle” for a given discrete distance. In this
way, the computation of the inscribed shape into the
other one is simplified as it is achieved by determining
the maximal value on the corresponding discrete dis-
INSCRIBED CONVEX SETS AND DISTANCE MAPS - Application to Shape Classification and Spatially Adaptive
Image Filtering
65

tance maps. The circumscribed shape can also be de-
termined from a particular discrete distance map if the
other shape is symmetrical. Furthermore results con-
cerning shape classification can be easily extended to
the 3D.
REFERENCES
Borgefors, G. (1986). Distance transformations in digital
images. CVGIP, 34:344–371.
Borgefors, G., Nystrom, I., and SannitiDiBaja, G. (1999).
Computing skeletons in three dimensions. Pattern
Recognition, 32:1225–1236.
Danielsson, P. (1980). Euclidean distance mapping.
CVGIP, 14:227–248.
Jones, M., Baerentzen, J., and Sramek, M. (2006). 3d dis-
tance fields: a survey of techniques and applications.
IEEE trans. on visualization and computer graphics,
12/4:581–599.
Lambert, P. and Macaire, L. (2000). Filtering and segmen-
tation : the specificity of color images. In Conference
on Color in Graphics and Image Processing, pages
57–64, Saint-Etienne, France.
Robert, F. (1998). Shape studies based on the circumscribed
disk algorithm. In IEEE-IMACS, CESA 98, pages
821–826, Hammamet, Tunisia.
Robert-Inacio, F. (2007). A relation between a similarity
parameter, the asplund distance and discrete distance
maps. In IVCNZ 2007, pages 254–259, Hamilton,
New Zealand.
Robert-Inacio, F. and Dinet, E. (2006). An adaptive median
filter for colour image processing. In 3rd CGIV, pages
205–210, Leeds, UK.
Rosenfeld, A. and Pfaltz, J. (1968). Distance functions in
digital pictures. Pattern Recognition, 1:33–61.
Serra, J. (1988). Image analysis and mathematical mor-
phology: theoretical advances. Academic Press.
Soille, P. (1999). Morphological image analysis. Springer
Verlag, Berlin.
Strand, R., Nagy, B., Fouard, C., and Borgefors, G. (2006).
Generating distance maps with neighbourhood se-
quences. In DGCI 2006, volume 4245, pages 295–
307, Szeged, Hungary.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
66
