
HUMAN GAIT RECOGNITION USING DIFFERENCE BETWEEN
FRAMES
Mazaher Karami and Alireza Ahmadyfard
Department of Electronics, School of Robotics and Electronic Engineering, Shahrood
University of Technology, Shahrood, Iran
Keywords: Biometric, Frieze pattern, Gait recognition.
Abstract: In this paper, we address the problem of human identification using gait. Considering the recent work of Lee
et al. (Lee et al., 2007) proposed for gait recognition. First we will introduce the algorithm proposed by Lee
et al.. This method has two main steps: (1) extract key frames to define the gait cycle pattern, and (2)
compute Shape Variation-based frieze patterns. These patterns are then used to classify and perform the gait
identification. We modify the utilized features in this approach. We try to omit redundant features based on
the effect of each feature on recognition rate and in next step, we improve performance of this approach by
making some changes in way of feature extraction. Finally, we use the statistical characteristics of employed
features instead of direct applying of remaining features. We test the proposed method on CASIA database.
The experimental results are used to compare the proposed method with Lee et al. method.
1 INTRODUCTION
Nowadays, there is an ever growing need to
determine or verify the identity of a person.
Biometrics are one of most important tools for this
purpose. Biometrics is a branch for identifying or
verifying the identity of a person based on
physiological or behavioral characteristics.
Physiological characteristics include fingerprints and
facial image. The behavioral characteristics are
actions carried out by a person in a characteristic
way and include signature, voice or gait, though
these are naturally dependent on physical
characteristics.
One of behavioral biometrics is gait. Gait as a
biometric has been attracted by many researchers in
recent years. It is non-invasively and can be
performed from distance. All human have the same
basic walking pattern, but their gaits are influenced
by many factors like their musculo-skeletal
structure, limb lengths, body mass and shape and
several other factors (Murray et al, 1964)(
Johansson,
1973
). These make gait unique for each person.
Generally, gait recognition approaches can be
categorized in two main groups: model-based
approaches and model-free or appearance-based
approaches.
Model-based methods simulate human body
using a model. In model-based approaches, a general
model is considered for human body and this model
is fitted to body of each person. Then using this
model, desired features are extracted. Model-based
approaches are fairly robust to some covariates like
view angle and occlusion, but they need large
amount of computations. Joint trajectories (Wang et
al., 2004), stride parameters (BenAbdelkader, 2002)
and so on, can be categorized in this group.
Second category of methods, are model-free or
appearance-based methods. In this category,
different algorithms are used to capture human
motion features, for example averaged silhouette
(Liu and Sarkar, 2004), HMMs (Chen et al.,
2006)(Sundaresun et al., 2003)(Kale et al.,
2002)(Suk and Sink, 2006), PCA (Murase and
Sakai, 1996), symmetry analysis (Hayfron-Acquah
et al., 2003), etc.
Lee et al. (Lee, 2007) used difference between a
key frame and the frames in a walking cycle for
feature extraction. In this paper, first we will review
their approach. Through the experiments we noticed
that some employed features are redundant, so we
omit redundant features in our proposed method.
Then we will modify algorithm to improve its
performance.
The rest of this paper is organized as follow. In
327
Karami M. and Ahmadyfard A. (2009).
HUMAN GAIT RECOGNITION USING DIFFERENCE BETWEEN FRAMES.
In Proceedings of the Fourth Inter national Conference on Computer Vision Theory and Applications, pages 327-332
DOI: 10.5220/0001793003270332
Copyright
c
SciTePress
section 2 we will review the algorithm proposed
by Lee et al. (Lee, 2007). In section 3 we investigate
the employed features in their algorithm and effect
of these features on recognition rate. Section 4
includes the proposed modification in order to
improve performance of Lee algorithm. Section 5
shows the experimental results and finally in Section
6 we draw the paper to conclusion.
2 PREVIOUS WORKS
Lee et al. (Lee, 2007) introduced a method for
recognition of human based on gait. The algorithm
mainly consists of two parts. First we need to extract
key frames for each gait cycle. We define one gait
cycle as the period starting from a double support
stance frames with left foot forward to the next. To
do this, we seek reliable detection of frames
occurring at the same relative offset within each gait
cycle (for example, double support stance frames
with left foot forward). Secondly, difference frames
based on subtracting these key frames from
silhouettes at other times are calculated and the
Shape Variation-Based frieze pattern (SVB frieze
pattern) is computed based on these difference
frames.
2.1 Key Frames
For computing SVB frieze pattern, we need to
determine a key frame as a reference frame for each
walking cycle. The key frame is defined as the
starting frame of one walking cycle, which is one of
the two double-support positions, (two feet on the
ground) where left foot is front. Each walking cycle
starts from the key frame and ends before the next
key frame. First, all silhouette images are aligned by
calculation centroid of silhouette.
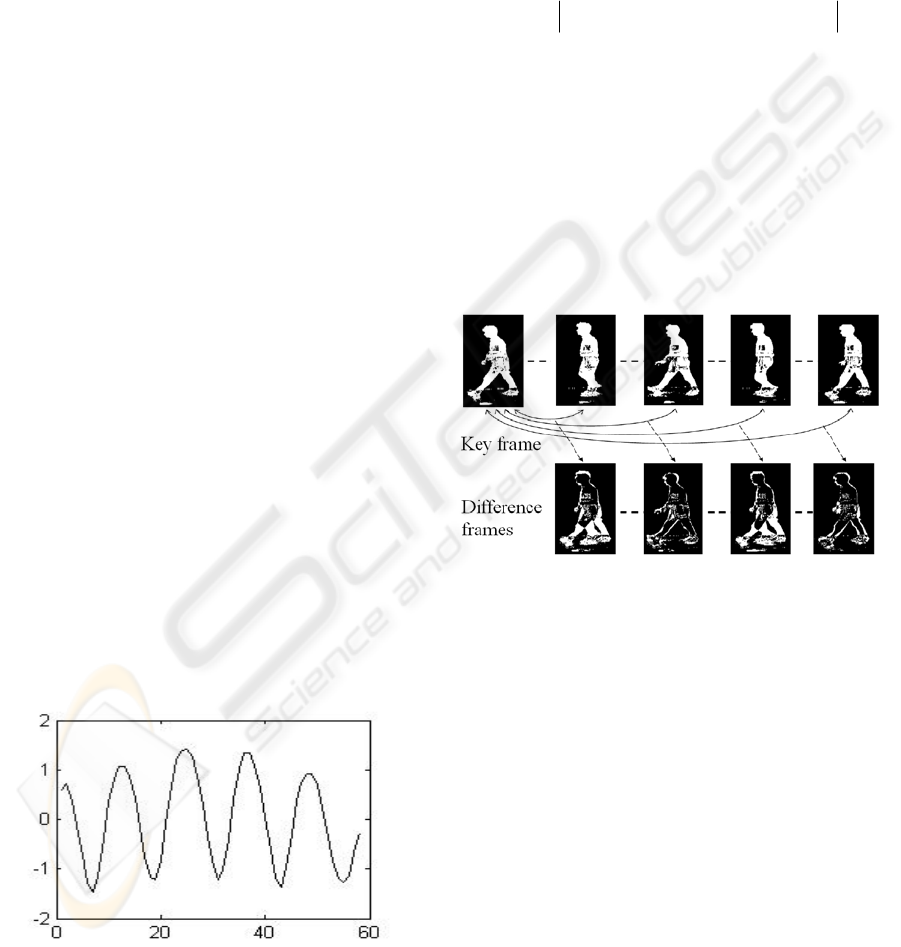
Figure 1: Normalized distance variation vector between
feet.
To find the start point of each cycle, projection
of the lower part of body for each silhouette
perpendicular to the horizontal axis is computed and
its width is obtained. Figure 2 is the plot of this
width vector over time.
After the key frame is obtained, a series of
difference frames are computed between key frame
and successive frames in gait cycle.
),,(),,(),,( tdyydxxItyxItyxD
keykey
++−= (1)
Here, (dx,dy) is the offset for minimum frame
difference and I(x,y,t) is the frame at time t inside a
given cycle. Figure 2 shows the process of
computing difference frames based on a key frame.
2.2 Shape Variation-Based Frieze
Pattern Extraction
SVB frieze patterns can be obtained by projecting
pixel values of difference frames along horizontal or
vertical axes.
Figure 2: Key frame and difference of other frames from it
(Lee et al, 2007).
By Projection of each difference frame, it is
converted into 1D vector. The SVB frieze pattern is
obtained by putting these vectors next together over
time.
(,) (,,)
h
x
FP y t D x y t=
∑
(2)
∑
=
y
v
tyxDtxFP ),,(),(
(3)
),,( tyxD is difference frame at time t.
Summation in formula 2 is over x's (rows) of
),,( tyxD . In formula 3 Summation is over y's
(columns) of
),,( tyxD .
Figure 3 shows a horizontal SVB frieze pattern
and Figure 4 is a vertical SVB frieze pattern. Each
column of a SVB frieze pattern at time t represents
the difference frame at time t.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
328
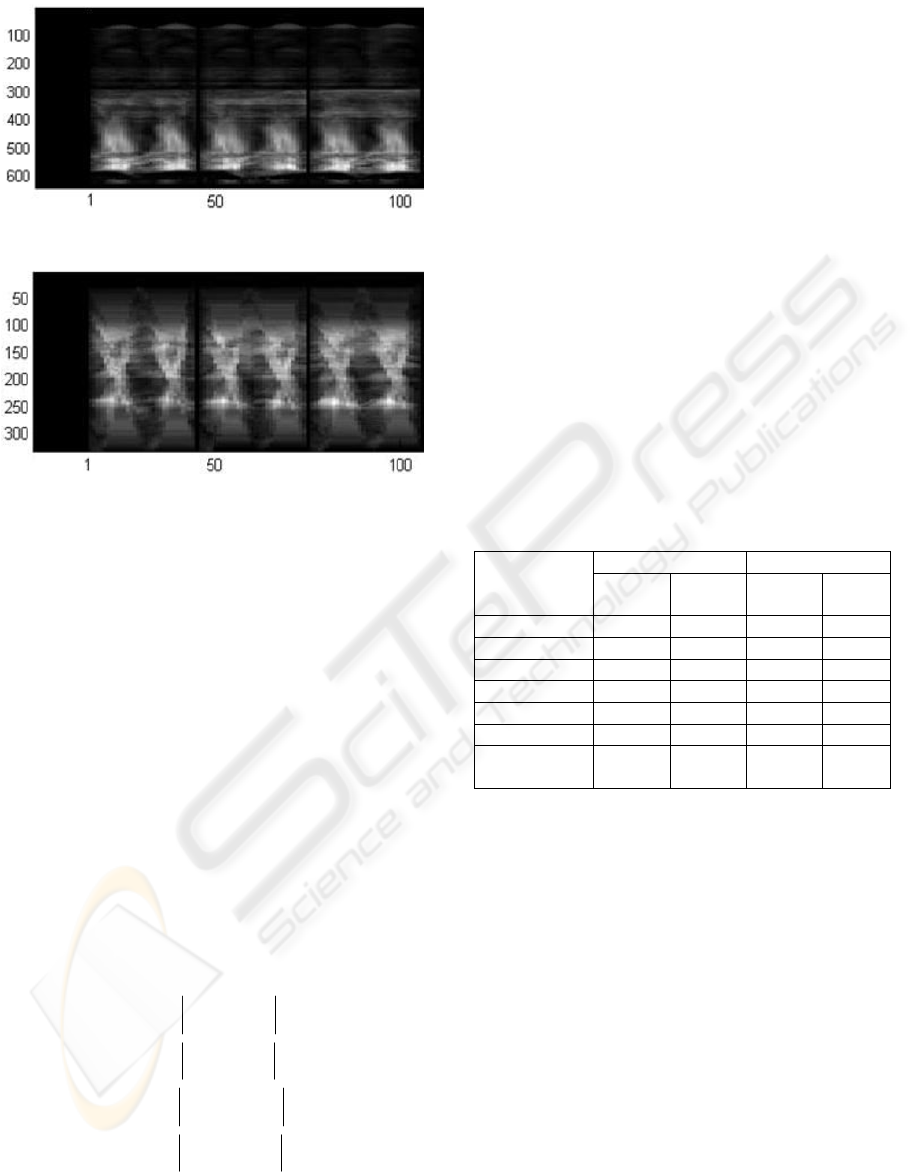
Figure 3: Typical horizontal SVB frieze pattern.
Figure 4: Typical vertical SVB frieze pattern.
2.3 Symmetry Map of Frieze Pattern
One gait cycle consists of two half cycles. These two
half cycles have almost the same pattern. But these
two half cycle are not exactly similar. In fact there is
some differences between them. These differences
can be used as a feature for recognition. In Lee
algorithm, these differences between two half cycles
has been obtained from SVB frieze patterns by
computing the difference between two half motion
cycles of SVB frieze patterns as symmetry map
(SM).
2.4 Classification
Four cues from each gait sequence: horizontal &
vertical SVB frieze pattern and horizontal and
vertical symmetry map. To obtain distance between
i’th gallery to j’th probe following distance are
computed:
j
h
i
hFP
FPFP
h
−=Φ
(4)
j
v
i
vFP
FPFP
v
−=Φ
(5)
j
h
i
hSM
SMSM
h
−=Φ
(6)
j
v
i
vSMv
SMSM −=Φ
(7)
A single cost function is computed by summing up
all four distance values.
3 EFFECT OF EACH FEATURE
ON RECOGNITION RATE
In order to study the effect of each feature on
recognition rate, we implemented the algorithm for
individual features once at a time. We also
evaluated the algorithm when SMh and SMv or FPv
and FPv are employed as a pair. Finally recognition
rate is computed when all four features are used all
together.
We tested the algorithm on CASIA database.
Obtained results in table 1 show that SMv and SMh
have least success in making distinction between
individuals. Best results achieved when FPh and
FPv are used together. When all four features are
utilized for identification, recognition rate is less
than while only FPh with FPv are used as a pair.
This indicates that SMv and SMh not only do not
increase recognition rate but also degrade it.
Therefore, we suggested using only FPh and FPv for
our algorithm.
Table 1: Ability of each feature in recognizing individuals.
4 PROPOSED CHANGES TO
IMPROVE PERFORMANCE
In this section we introduce the modification
suggested to improve Lee et al. method (Lee, 2007).
First we use difference between successive frames
rather than key frame based method, used in original
paper. The experimental results show that this
modification improves the recognition performance.
In next step, we try out statistical characteristics of
frieze patterns instead of direct use of them for
calculation of cost function.
4.1 Difference Frames
In Lee et al. algorithm difference between a key
frame with frames in a walking cycle is used to
nm-05 nm-06
Rank 1 Rank 5 Rank 1 Rank
5
FPh 62.2% 76.3% 61% 80.5%
FPv 68% 85.7% 72.9% 82.2%
SMh 46.2% 59.6% 46.6% 53.4%
SMv 44.5% 58% 42.3% 60.2%
FPh + FPv 68.9% 85.7% 71.2% 83.9%
SMh + SMv 47% 61.3% 50% 57.6%
All four
features
64.7% 84% 67.8% 81.3%
HUMAN GAIT RECOGNITION USING DIFFERENCE BETWEEN FRAMES
329

compute SVB frieze pattern. We can calculate
difference between successive frames instead of
difference between a key frame and other frames in
a walking cycle. Figure 5 shows successive
difference frames.
Figure 5: Successive difference between frames.
Difference between frames can be a
representative for motion in a way and using this, we
can capture dynamic features of walking. For this
purpose, we obtain a starting frame for each gait
cycle as previous. Then, differences between
consecutive frames are achieved. By means of these
new difference frames, FPh and FPv are computed.
Table 2 indicates achieved results. By implying
this change to algorithm, performance fairly
improves.
4.2 Statistical Characteristics of Frieze
Pattern
Direct use of FPh and FPv in order to computation
of distance between features of two individuals has
some disadvantages. It increases sensitivity to noise.
Moreover, the length of features must be the same to
make comparison possible. So we need to align
them, and this also adds extra noise to system. We
can extract some characteristics of these features,
and use these characteristics for calculation of
distance function, instead of direct use of features.
Calculation of statistical moments is one way to
capture embedded information in given data. Mean
and variance are most popular statistical moments.
For this purpose, we calculate mean value of data in
each row of FPh and FPv. By doing this, we convert
each nm× matrix to a vector with size of
1
×
m .
We apply this algorithm to FPh and FPv. Now,
these mean vectors are used for obtaining distance
functions rather than FPh and FPv themselves. We
name these new features as MFPh and MFPv. By
means of this change, we will have a great increase
in recognition rate.
5 EXPERIMENTAL RESULTS
In this section, we demonstrate the result of
experiment in which our algorithm is compared with
the Lee et al. algorithm (Lee et al, 2007). In Lee et
al. paper, MoBo database is used for evaluating the
algorithm. We did not access to MoBo database
instead we used CASIA database in this experiment.
Nearest neighbour method is used for classification.
5.1 CASIA Database
CASIA gait database is collected by Institute of
Automation, Chinese Academy of Sciences. This
database is available on "http://www.sinobiometrics.
com". CASIA database contains 124 subjects and for
each subject there are 10 different capturing
conditions ("nm-01" to "nm-06","bg-01","bg-
02","cl-01" and "cl-02"). In subject nm-01 to nm-06,
person is walking freely in different times but
without changes in its appearance. In bg-01 and 2,
subject is carrying a bag and in cl-01 and 2, clothing
is changed. For each of above conditions subject is
viewed from 11 different angles. We used only nm-
01 to nm-06, while the viewing angle for walking
subject is perpendicular to optical axis of camera.
We used subsets nm-01 to 4 for training and nm-05
and nm-06 subsets for test.
5.2 Results
We have tabled the result of implementing original
algorithm proposed by Lee et al. and our proposed
changes in section 4 on CASIA database in tables 2
and 3, respectively.
Table 2 is result of algorithm after use of
successive difference frames instead of key frame
based difference frames. Fair improvement is
observed by applying this change on main work. In
this stage as a result of previous discussion about
effect of each feature on recognition rate we ignored
SMh and SMv and only FPh and FPv have been
computed. First row shows recognition rate, when
difference frames have been computed based on
difference between a key frame and the frames in
other times. Second row shows result of algorithm
when successive difference frames have been used
instead of key frame based differences.
Table 3 demonstrates achieved result using rows
mean vectors (MFPh and MFPv) in comparison with
direct application of FPh and FPv. Here, for
computing the FPh and FPv, successive difference
frames have been used. In order to use mean vectors,
we first normalized each vector by subtracting
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
330
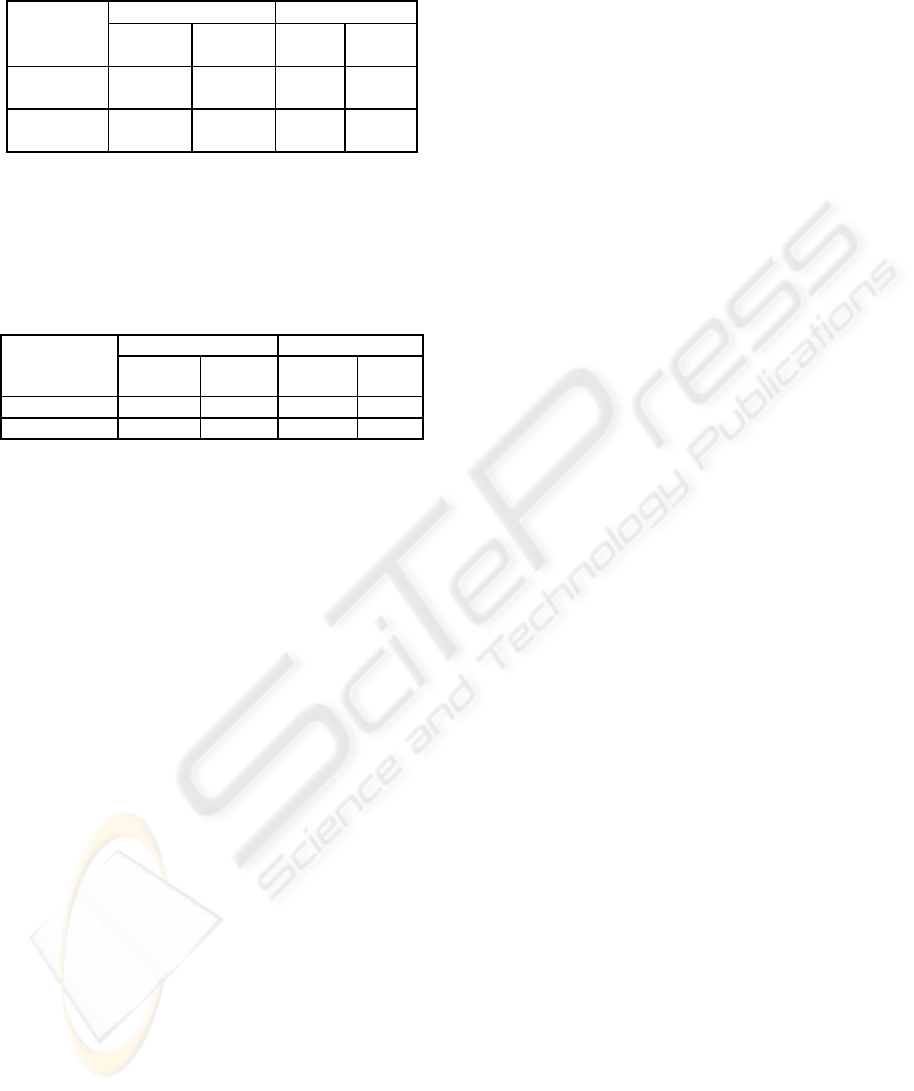
Table 2: Result of using successive difference between
frames and computing FPh and FPv.
nm-05 nm-06
Rank 1 Rank 5 Rank
1
Rank
5
Key frame
differences
68.9% 85.7% 71.2% 83.9%
Successive
differences
74.8% 84% 73.7% 84.7%
mean of each vector from it and then dividing it by
its standard deviation. We obtain considerable
increase in recognition rate when we use mean
vectors.
Table 3: Result of using row mean of frieze patterns
instead of frieze patterns themselves.
6 CONCLUSIONS
In this paper, we introduced one way to recognize
people based on their gait, proposed S. Lee et al.
from the Penn state university. We tried to omit
redundant used features in this algorithm. Then we
applied differences between consecutive images to
extract features instead of computation of difference
between a key frame and other frames. Using these
frames, vertical and horizontal frieze patterns are
computed. In calculation of distance function, mean
value of each row of frieze patterns in form of a
vertical mean vector and a horizontal mean vector
are used. We showed that applying mean vectors is
more successful than direct use of frieze patterns.
We implemented our algorithm and previous
work, on CASIA database. We indicated that our
algorithm has better performance in comparison.
ACKNOWLEDGEMENTS
The authors thank Chinese Academy of Sciences.
Portions of the research in this paper use the CASIA
Gait Database collected by Institute of Automation,
Chinese Academy of Sciences.
REFERENCES
Z. Liu, S. Sarkar, 2004, "Simplest representation yet for
gait recognition: averaged silhouette", Proceedings of
the 17th International Conference on Pattern
Recognition, Vol. 2,704-711.
C. Chen, J. Liang, H. Zhao, H. Hu, 2006, "Gait
recognition using hidden markov model", ICNC, Part
I, LNCS 4221, pp.399-407, Springer.
A. Sundaresun, A. R. Chowdhury, R. Chellappa, 2003, "A
hidden markov model based framewok for recognition
of humans from gait sequences", Proceeding of IEEE
International Conference on Image Processing.
A. Kale, A. Rajagopalan, N. Cuntoor, and V. Kruger,
2002, "Gait-based recognition of humans using
continuous HMMs", Proceeding of the IEEE
Conference on Automatic Face and Gesture
Recognition.
H.I. Suk, B.K. Sink, 2006, "HMM-based gait recognition
with human profiles", SSPR and SPR, LNCS 4109,
pp.596-603.
H. Murase, R. Sakai, 1996, "Moving object recognition in
eigenspace representation: gait analysis and lip
reading", Pattern Recognition Lett.17, 155–162.
J. B. Hayfron-Acquah, M. S. Nixon, J. N. Carter, 2003,
"Automatic gait recognition by symmetry analysis",
Pattern Recognition Letters, ELSEVIER Science B.V.
S. Lee, Y. Liu, and R. Collins, 2007 , "Shape Variation-
based Frieze Pattern for Robust Gait Recognition,"
Proceedings of CVPR 2007, 1-8.
M. S. Nixon, J. Carter, 2006, "Automatic Gait Recognition
by Gait", Proceedings of the IEEE, Vol. 94, No. 11.
CASIA Gait Database,
http://www.sinobiometrics.com
M.P. Murray, A.B. Drought, R.C. kory, 1964, "Walking
Pattern of Normal Men", J. Bone Joint Surg. 46 A(2)
33-360.
G. Johansson, 1973 “Visual Perception of Biological
Motion and a Model for its Analysis”, Perception and
Psychophysics, Vol. 14, No. 2, pp. 201–211.
P.S. Huang, C.J. Harris, M.S. Nixon, 1999, "Human Gait
Recognition in Canonical Space Using Temporal
Templates", IEE Proceeding Computer Vision, Image
& Signal Processing.
L. wang, T. Tan, 2003, "Silhouette Analysis-Base Gait
Recognition for Human Identification", IEEE Trans.
PAMI, 25(12) 1505-1518.
L. Wang,T. Tan, H. Ning, W. Hu, 2004, "Fusion of Static
and Dynamic Body Biometrics for Gait Recognition",
IEEE Trans. Circuit Sys. Video Techno., vol. 14, no.
2, pp. 149-158.
C. BenAbdelkader, 2002, "Gait as a Biometric for Person
Identification in Video Sequences", PhD Dissertation,
University of Maryland, College Park.
nm-05 nm-06
Rank 1 Rank 5 Rank 1
Rank
1
FPh + FPv 74.8% 84% 73.7% 84.7%
MFPh+MFPv 90.7% 95% 87.3% 95.8%
HUMAN GAIT RECOGNITION USING DIFFERENCE BETWEEN FRAMES
331
