
PROJECTION PEAK ANALYSIS FOR RAPID EYE LOCALIZATION
Jingwen Dai, Dan Liu and Jianbo Su
Research Center of Intelligent Robotics, Shanghai Jiaotong University, Shanghai, 200240, China
Keywords:
Eye localization, Threshold, Segmentation, Projection peak.
Abstract:
This paper presents a new method of projection peak analysis for rapid eye localization. First, the eye region
is segmented from the face image by setting appropriate candidate window. Then, a threshold is obtained
by histogram analysis of the eye region image to binarize and segment the eyes out of the eye region. Thus,
a series of projection peak will be derived from vertical and horizontal gray projection curves on the binary
image, which is used to confirm the positions of the eyes. The proposed eye-localization method does not
need any a priori knowledge and training process. Experiments on three face databases show that this method
is effective, accurate and rapid in eye localization, which is fit for real-time face recognition system.
1 INTRODUCTION
Recent years, building automatic face recognition
system has become a hot topic in computer vision and
pattern recognition areas. Some commercial systems
have been developed and applied in public and indi-
vidual security. Generally, an automatic face recog-
nition system is composed of three steps, i.e. face
detection, facial feature localization and face recogni-
tion. Face detection determines whether or not there
are any faces in the image or video sequence and,
if present, acquires the location and extent of each
face. Facial feature localization obtains the location
of salient feature points of face, i.e. eyes, nose, mouth
etc. And face recognition identifies or verifies one or
more persons in the scene using a stored database of
faces.
Most researchers test their recognition algorithms
under an assumption that the locations of facial fea-
ture points are given or obtained through some inter-
actions between users, i.e. pointing out the positions
of eyes manually. Roughly speaking, in the major
face recognition algorithms, salient facial landmarks
must be detected and faces must be correctly aligned
before recognition. The performance of a face recog-
nition algorithm is greatly affected by the accuracy
of facial features alignment. The recognition rate of
Fisherface, which is one of the most successful face
recognition methods, is reduced by 10%, when the
centers of the eyes have been inaccurately localized
with a deviation of just one pixel from their true po-
sitions (S. G. Shan, 2004). What’s more, the posi-
tion of eyes is the precondition for the localization of
other facial landmarks. Therefore, the localization of
the eyes is essential to automatic face recognition sys-
tems.
Many representation approaches of facial fea-
ture localization have been proposed in the previ-
ous works, such as Hough transform (T.Kawaguchi,
2000), symmetry detector (D. Reisfeld, 1995), ASM
(T. F. Cootes, 1998), AAM (T. F. Cootes, 2001), Ad-
aboost (P. Viola, 2001), projection analysis (Kanade,
1973; Z.H. Zhou, 2004; G.H. Li, 2006). Among the
approaches above, projection analysis is one of the
most classical algorithms. In gray facial image, the
gray value of facial features is lower than that of the
skin. By utilizing this character, firstly, the projec-
tion analysis calculates the sum of gray value or gray
function value along x-axis and y-axis respectively
and find out the special change points, then aggregates
the change points of different directions according to
the prior knowledge, and finally obtains the location
of facial landmarks. Compared with other methods,
its computational complexity is very low which is im-
portant for real-time application. Furthermore, it does
not need any training process. However, general pro-
jection analysis is not robust to the variation of face
poses, illuminations, expressions, or additional acces-
sories, such as glasses.
This paper is to propose a novel method of projec-
tion peak analysis for rapid and precise eye localiza-
tion. First, we segment the eye region from the face
image by setting appropriate candidate window. Sec-
ond, by histogram analysis of the eye region image,
315
Dai J., Liu D. and Su J. (2009).
PROJECTION PEAK ANALYSIS FOR RAPID EYE LOCALIZATION.
In Proceedings of the Four th International Conference on Computer Vision Theory and Applications, pages 315-320
DOI: 10.5220/0001787603150320
Copyright
c
SciTePress
we get a threshold and perform binary transformation
to segment eye out of the eye region. Then, a series
of projection peak will be derived from vertical and
horizontal gray projection curves of the binary image,
which is utilized to figure out the exact coordinates of
the eye.
The rest of this paper is organized as follows. In
Section 2, the process of eye localization with pro-
jection peak analysis is briefly illustrated. Section 3
shows the performance of our proposed method in
three standard face databases and in real-time appli-
cation, followed by conclusions in Section 4.
2 DESCRIPTION OF METHOD
The projection peak method we proposed is to be de-
scribed in this section. This includes the selection of
candidate window, the threshold for segmentation of
eye region image, the gray projection and the analysis
of projection peak.
2.1 Selection of Candidate Window
To locate the position of eyes, first we need know
the position of face in the image. There have been
many face detection methods so far, such as Adaboost
(P. Viola, 2001). After the face is detected, we seg-
ment the face region from image as shown in Fig.1(a),
then eye localization can be carried out in the face re-
gion image as shown in Fig.1(b).
(a) (b)
Figure 1: (a) Face detection with Adaboost (b) Segmented
face image.
Generally, in a face, 1) two eyes must be in the up-
per part of human face; 2) The eyebrowmust be above
the eye; 3) Two eyes must be lie on both sides of
centre-axis of frontal face image symmetrically, etc.
These rules are of great help to reduce the searching
area of eyes, which not only eliminates some interfer-
ence, but also reduces the computation cost. We de-
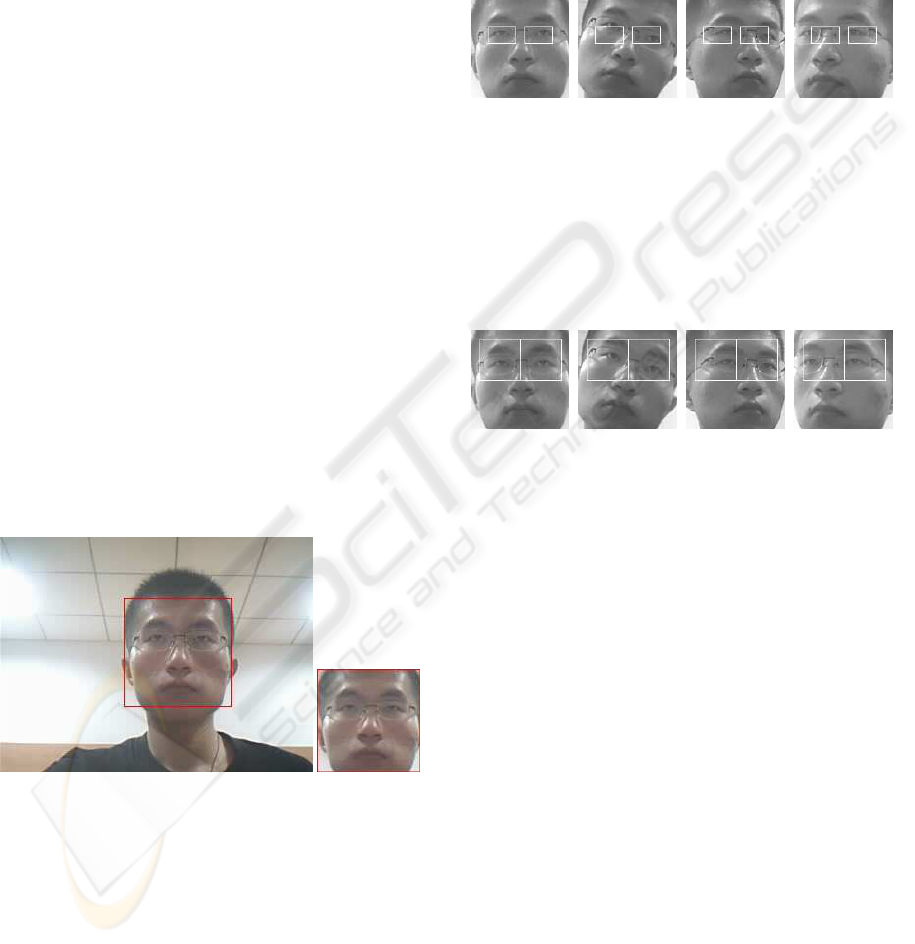
fine the region of eye as eye candidate window, which
must be robust to the variation of face poses. Fig. 2
shows the case that the eye candidate window are too
small. On the contrary, if the eye candidate windows
are too large, some interference including eyebrows,
hair and the frame of glasses will be brought in, of
which the gray value is also low. So the interference
has greatly influences on the eye localization through
general projection analysis.
(a) (b) (c) (d)
Figure 2: (a) Candidate windows under ideal conditions (b -
d) Eyes out of candidate windows when face poses changed.
Fig. 3 shows the case that eyes are still in the can-
didate windows when face pose changed. However,
we need to eliminate the interference (i.e. eyebrows,
hair, the frame of glasses etc.) as much as possible to
localize the positions of the eyes.
(a) (b) (c) (d)
Figure 3: (a) Candidate windows under ideal conditions (b -
d) Eyes out of candidate windows when face poses changed.
When the candidate windows are chosen, the re-
gion of eyes can be segmented as shown in Fig. 4(a).
2.2 Segmentation with a Threshold
Because of its intuitive properties and simplicity of
implementation, image thresholding enjoys a central
position in applications of image segmentation. And
the crucial point of segmentation is to select a proper
threshold. In the candidate window, it is obvious that
the gray value of the pupil of the eye is lower than
that in other regions. Hence, the threshold for seg-
mentation is determined via histogram analysis. First
we sort all the pixels in the candidate window ascend-
ingly according to their gray value. Then the p% pix-
els with smaller gray value is set to be 255, while the
rest is set with value 0. Thus the image of candidate
window is binarized, as shown in Fig. 4(b).
2.3 Gray Projection
Under ideal circumstances, the position of the pupil’s
center should be the position of the extreme point of
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
316
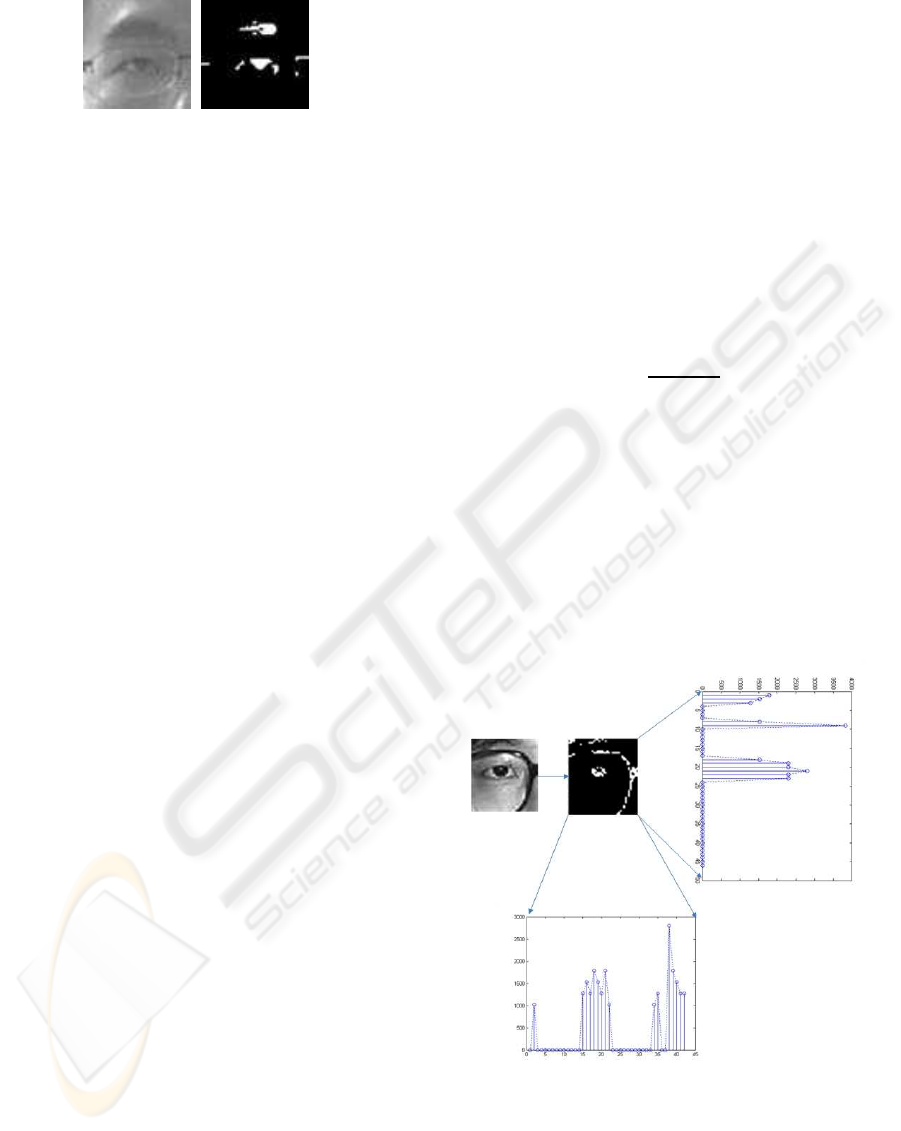
(a) (b)
Figure 4: (a) Original image of eye region (b) Image after
gray-histograms threshold segmentation.
the vertical projection curve (VPC) and the horizontal
projection curve (HPC). However, there will be some
interference(i.e. eyebrows,hair, frame of glasses etc.)
owing to the larger candidate window, and their gray
values are even lower than that of the pupil. What’s
more, because of the variation of illumination, there
will be some shadows around eyeballs, which have
great influence to the curve of projection. So it is
unreasonable to take the extreme points of VPC and
HPC as the position of pupil’s center. To solve the
problem mentioned above, we proposed a method
of projection peak analysis(PPA),which will be de-
scribed in the following section.
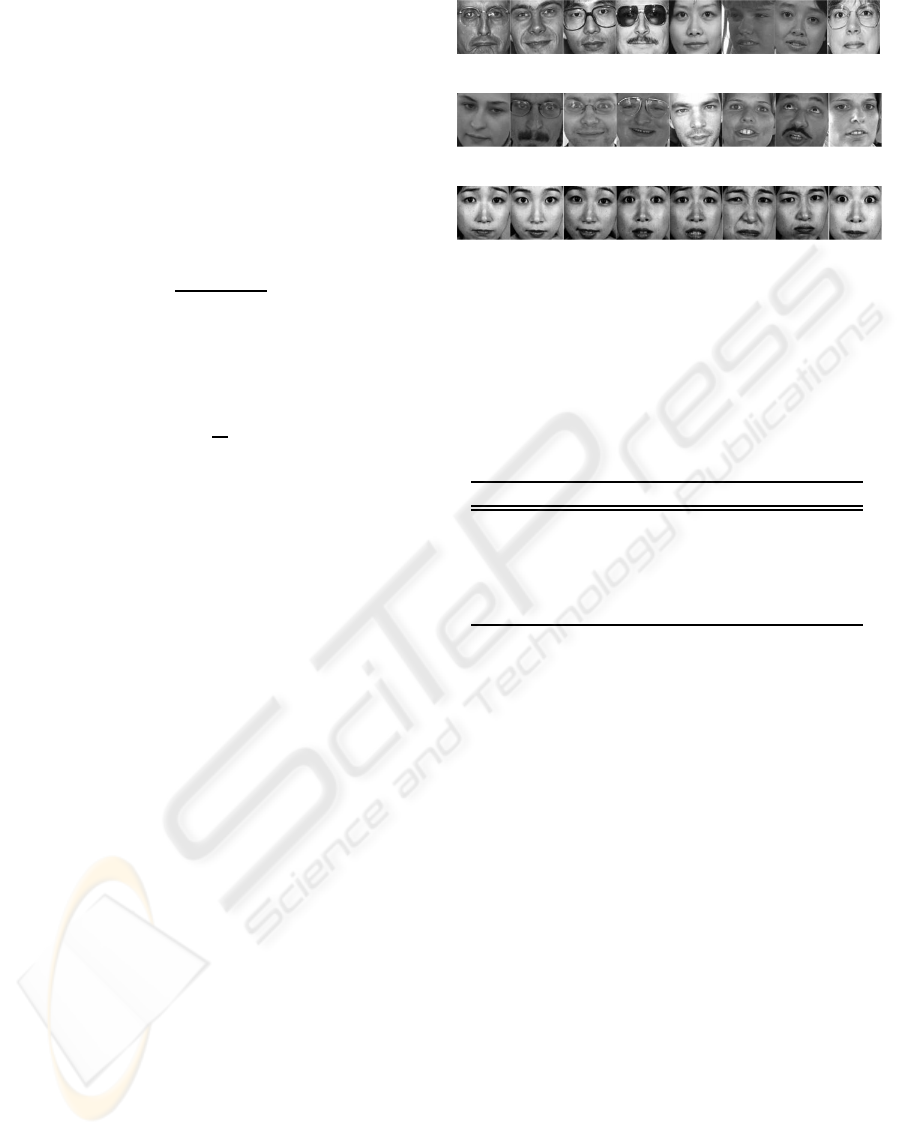
2.4 Projection Peak Analysis
The main process of projection peak analysis(PPA) is
described as follows. Firstly, we analyze the possi-
bly existing interference. From top to bottom along
the vertical direction, the possibly existing regions
that have lower gray values are hair, eyebrow, the up-
per frame of glasses, pupil, and the lower frame of
glasses successively. While from left to right along
horizontal direction, the possibly existing regions that
have lower gray values are hair, the outer frame of
glasses, pupil, and the inner frame of glasses suc-
cessively. After threshold segmentation, the inter-
ference mentioned above might exist simultaneously,
separately or even be absent. Secondly, in the candi-
date window, for eyebrow and pupil, the gray value
of them are lower, and compared with the interfer-
ence described above, the areas occupied by them
are larger. As a result, they could be segmented
by means of selecting proper threshold (Sometimes
the eyebrow is too sparse or too thin to be seg-
mented out, but the pupil can be extracted as usual).
Take the horizontal projection curve of binary im-
age after threshold segmentation which is denoted by
P(y) for example. Through analysis, it is easily to
find out there are some peaks in the curve, that can
be represented as [y
11
,y
12
],[y
21
,y
22
],··· ,[y
n1
,y
n2
],
in which y
11
,y
21
,··· ,y
n1
are the rising edge and
y
12
,y
22
,··· ,y
n2
are the falling edge of the peaks. The
peaks mentioned above are corresponding to pupil,
eyebrow and other interference respectively. And the
peak accompanied with pupil has broader breadth,
larger area and little deviation from the center of im-
age. For the vertical projection curve, we can get sim-
ilar result. The result of projection is shown in Fig. 5.
By this characteristic, we proposed a new method for
rapid eye localization based on projection peak analy-
sis. Regarding to every projection peak, we define an
evaluation value U
n
in Eq. (1),
U
n
= αW
n
+ βS
n
+ γD
n
, (1)
W
n
= y
n2
− y
n1
, (2)
S
n
=
y
n2
∑
y=y
n1
P(y), (3)
D
n
= |
y
n2
− y
n1
2
−Y
c
|, (4)
where W
n
,S
n
,D
n
is the peak’s breadth, peak’s area
and deviation between image’s center and the peak’s
central axis respectively as defined in Eq. (2-4), and
α,β,γ are weights. Y
c
in Eq. (4) is the image center
along y-axis.
According to Eq. (1), the U values of all projec-
tion peaks are calculated and then sorted. The peak
having the maximumU value is considered as the one
corresponding to the region of eyeball. By calculating
the maximumpoint in this peak, the coordinates of the
pupil’s center is finally confirmed.
Figure 5: Horizontal and vertical projection peaks.
3 EXPERIMENTS
To validate the proposed method, we implement the
method by C++, and evaluate the performance in
PROJECTION PEAK ANALYSIS FOR RAPID EYE LOCALIZATION
317
three standard face databases and in real-time re-
spectively. A widely accepted criterion (O. Jesorsky,
2001) is used to judge the quality of eye localization,
which is a relative error measure based on the dis-
tances between the located and the accurate central
points of the eyes. Let C
l
and C
r
be the manually ex-
tracted left and right eye positions, C
′
l
and C
′
r
be the lo-
cated positions, d
l
be the Euclidean distance between
C
l
andC
′
l
, d
r
be the Euclidean distance betweenC
r
and
C
′
r
. Then the relative error of this localization is de-
fined as Eq. (5):
err =
max(d
l
,d
r
)
kC
l
−C
d
k
. (5)
If err < 0.25, the localization is considered to be cor-
rect. Thus, for a face database comprising N images,
the localization rate is defined as:
rate =
N
∑
i=0
err
i
<0.25
1
N
× 100%, (6)
where err
i
is the err on the i-th image.
3.1 Performances on Standard Face
Database
The FERET database (P. J. Phillips, 1998) is the most
widely adopted benchmark for the evaluation of face
recognition algorithm, in which there are 14051 hu-
man head-shoulder images, and among these images,
there are 3816 images of which the position of two
pupils have been labelled manually. The face re-
gions in these images are taken out to form a test
set. The BioID face database consists of 1521 frontal
view gray level images with pupils’ position manually
marked. And this database features a large variety of
illumination and face size, which is used to evaluate
the performance of proposed method under different
illuminations. The JAFFE face database (M. J. Lyons,
1998) is made up of 213 frontal view gray level im-
ages with a large variety of facial expressions posed
by Japanese females. We use this database to test the
method when facial expressions changed.
Let W and H be the width and height of fa-
cial image respectively. In our experiments, we set
the parameters of eye candidate window as follow:
Let (W/12,H/12) and (W/12,H/12) the origin of
left and right eye candidate window, (5 × H/12,5 ×
H/12) be the size of two eyes candidate window.
Some test samples are shown in Fig. 6, including
variations of face poses, illuminations, expressions,
and accessories.
The results of experiment are shown in Table 1,
where p is the threshold for threshold segmentation. It
(a)
(b)
(c)
Figure 6: Some images from experimental database (a)
Sample images from FERET (b) Sample images from
BioID (c) Sample images from JAFFE.
is shown that when p is set to 5, the best accurate rates
of eye localization are obtained on all three databases.
Table 1: Localization accuracy on standard face database.
p(%) FERET(%) BioID(%) JAFFE(%)
1 79.18 71.79 84.62
3 93.19 85.78 90.36
5 98.92 95.87 99.26
8 96.19 92.63 97.10
10 95.71 86.06 96.51
The eye localization by the proposed method are
shown in Fig. 7
in which localization results of frontal facial im-
ages from FERET, BioID and JAFFE are shown in
Fig.7 (a) (b) (f), respectively, with illumination and
facial expression changes. The position of the eye is
indexed by white ”o”s in the images. Fig. 7(c) ex-
hibits some localization results of facial images with
multi-poses from FERET, from which we can con-
firm the robustness of the proposed method to the face
pose changed. Some results of facial images with all
kinds of glasses from FERET and BioID are shown
in Fig. 7(b) and (e), it is evident that our method
is able to eliminate the interference of glasses and
achieve precise eye localization. Through the anal-
ysis of some mis-located samples ( see Fig. 7(g)), it
is found that the intense reflection from glasses leads
to the pupils be invisible, which is the main reason for
mis-localization.
3.2 Comparison with Other Methods
Adaboost (P. Viola, 2001) is a general and effective
method for object detection. In order to obtain the
Adaboost eye detector, we choose 4532 images of eye
with a resolution of 20×20 as positive examples. The
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
318
(a)
(b)
(c)
(d)
(e)
(f)
(g)
Figure 7: Some result images (a) Some frontal samples
in FERET (b) Some samples with glasses in FERET (c)
Some profile samples in FERET (d) Some frontal sam-
ples in BioID (e) Some samples with glasses in BioID (f)
Some samples from JAFFE (g) Some samples that eyes are
wrongly located.
negative examples are obtained by a bootstrap pro-
cess (P. Viola, 2001), and during every strong classi-
fier training process, 2236 images without eye are em-
ployed as negative examples. Finally we obtained an
eye detector with 16 strong classifiers. Experiments
of eye localization with trained Adaboost detector are
carried out in three standard face database previously
mentioned and the results are shown in Table 2. The
results of HPF (Z.H. Zhou, 2004) and our method
are also enumerated in Table II. Through comparison
among the experiment results of three different meth-
ods, it is evidently illuminated that our method can
obtain great accuracy on the basis of little time con-
suming. In addition, without any training process, our
method is convenience to implement.
Table 2: Comparison with other methods on localization
accuracy and average time consumed.
Our Method Adaboost HPF
FERET(%) 98.92 98.93 —-
BioID(%) 95.87 96.03 94.81
JAFFE(%) 99.26 99.47 97.18
Time(ms) 0.56 10.36 0.49
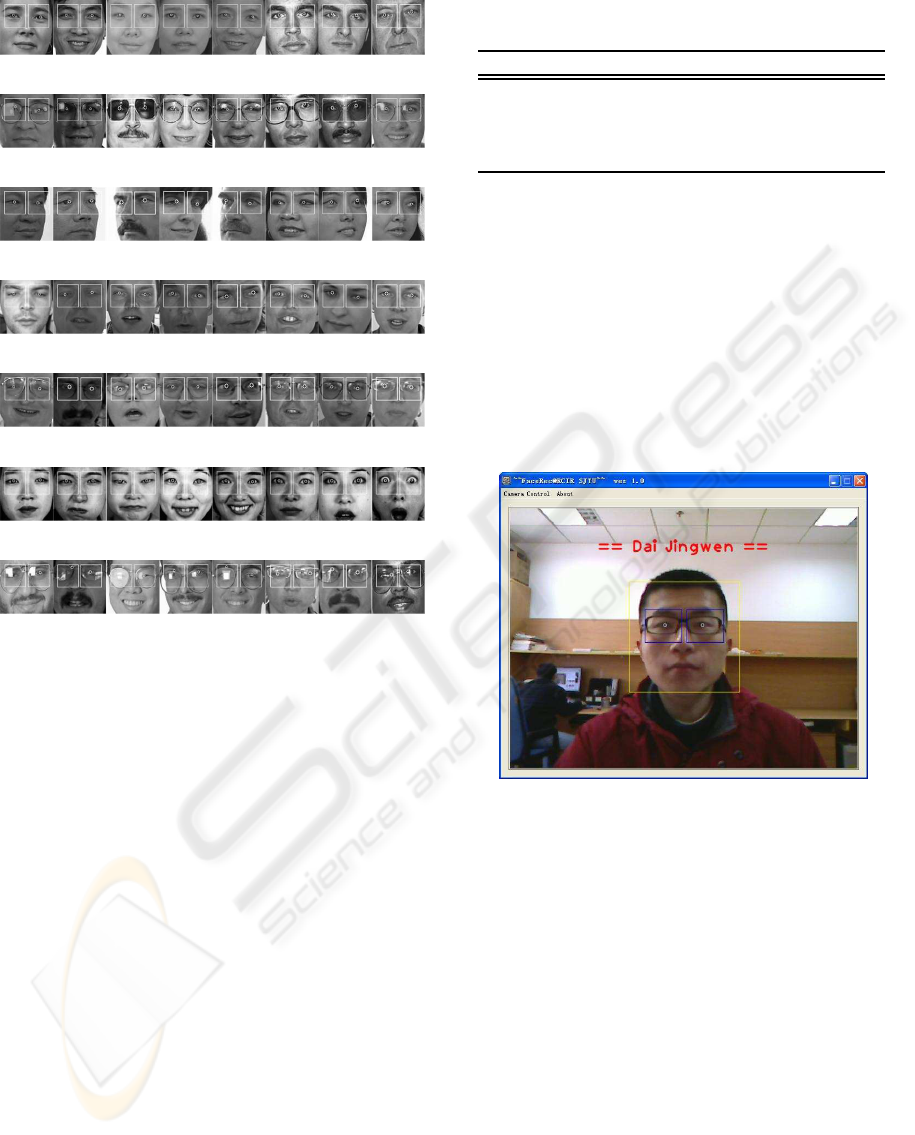
3.3 Performance on Real-Time Face
Recognition System
For an image of the size 128 × 128, it approximately
takes 0.56ms to locate eyes position by a PC of
1.8G CPU and 256M memory. Moreover, the pro-
posed method has been added into the face recogni-
tion system developed by Research Center of Intelli-
gent Robotics (RCIR), Shanghai Jiaotong University
(See Fig. 8). The rapid and accurate eye localization
ensure the system to achieve better precision rate.
Figure 8: Real-time eye localization
4 CONCLUSIONS
In this paper, a novel method is proposed, which
achieves rapid and accurate eye localization by mak-
ing use of the static rules of human face on the basis of
uncomplicated computation. In order to eliminate the
interferences (i.e. hair, eyebrow, glasses) around eye
region, we improve the general projection method by
projection peak analysis. Experimental results show
that our method is effective, accurate and rapid in eye
localization, especially when the face poses, illumi-
nations, expressions, and accessories varied. Owing
to the lower computation cost, our method can satisfy
the requirement of real-time face recognition system
well. Although high performance is achieved by the
proposed method, we should also mention that one
drawback of our method lies in the situation when the
PROJECTION PEAK ANALYSIS FOR RAPID EYE LOCALIZATION
319

pupils are occluded for some reasons, i.e. the intense
light reflection from glasses. Further efforts will be
focused on how to solve this drawback.
ACKNOWLEDGEMENTS
The work reported was partially sponsored by Na-
tional Natural Science Foundation of China (No.
60675041) and Program for New Century Excellent
Talents of Ministry of Education, China (NCET-06-
0398).
REFERENCES
D. Reisfeld, H. Wolfson, Y. Y. (1995). Context free atten-
tional operators: the generalized symmetry transform.
International Journal of Computer Vision, 14(2):119–
130.
G. H. Li, X. P. Cai, X. L. (2006). An efficient face normal-
ization algorithm based on eyes detection. In Proceed-
ings of International Conference on Intelligent Robots
and Systems.
Kanade, T. (1973). Picture Processing System by Computer
Complex and Recognition of Human Faces. PhD the-
sis, Kyoto University.
M. J. Lyons, S. Akamatsu, M. K. (1998). Coding facial
expressions with gabor wavelets. In Proceeding of
the 3rd IEEE International Conference on Automatic
Face and Gesture Recognition.
O. Jesorsky, K. Kirchberg, R. F. (2001). Robust face detec-
tion using the hausdorff distance. In Proceeding of the
3rd International Conference on Audio- and Video-
based Biometric Person Authentication.
P. J. Phillips, H. Wechsler, J. H. (1998). The feret database
and evaluation procedure for face-recognition algo-
rithms. Image and Vision Computing, 16(5):295–306.
P. Viola, M. J. (2001). Rapid object detection using a
boosted cascade of simple features. In Proceedings of
the IEEE International Conference on Computer Vi-
sion and Pattern Recognition.
S. G. Shan, Y. Z. Chang, W. G. (2004). Curse of mis-
alignment in face recognition: Problem and a novel
mis-alignment learning solution. In Proceeding of the
6th IEEE International Conference on Automatic Face
and Gesture Recognition.
T. F. Cootes, G. J. Edwards, C. J. T. (1998). Active appear-
ance models. In Europeon Conference on Computer
Vision.
T. F. Cootes, G. J. Edwards, C. J. T. (2001). Active ap-
pearance models. IEEE Trans. Pattern Anal. Machine
Intell., 23(6):681–685.
T. Kawaguchi, D. Hikada, M. R. (2000). Detection of the
eyes from human faces by hough transform and sepa-
rability filter. In Proceedings of International Confer-
ence of Image Processing.
Z. H. Zhou, X. G. (2004). Projection functions for eye de-
tection. Pattern Recognition, 37(5):1049–1056.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
320
