
HUMAN VISION SIMULATION IN THE BUILT ENVIRONMENT
Qunli Chen, Chengyu Sun
DDSS Group, Faculty of Architecture, Bulding and Planning, Eindhoven University of Technology
P.O. Box 513, 5600 MB Eindhoven, The Netherlands
Bauke de Vries
DDSS Group, Faculty of Architecture, Bulding and Planning, Eindhoven University of Technology
P.O. Box 513, 5600 MB Eindhoven, The Netherlands
Keywords: Architectural cue recognition, Human vision simulation, Visual perception, Built environment.
Abstract: This paper first presents a brief review on visual perception in the built environment and the Standard
Feature Model of visual cortex (SFM); following experiments are presented for architectural cue recognition
(door, wall and doorway) using SFM feature-based model. Based on the findings of these experiments, we
conclude that the visual differences between architectural cues are too subtle to realistically simulate human
vision for the SFM.
1 INTRODUCTION
In our daily life, we evaluate the building and the
built environment from two different aspects,
namely the structure of the building and the human
behavior in the building. In the past research was
focused on the structure of the building. However, as
the development of the new technologies, nowadays
the buildings can be designed as to meet different
people’s requirements. Therefore we should turn to
the other evaluator, the behavior of human beings in
the building or built environment. It is important to
develop a dynamic model in which we can simulate
human behavior with the help of agent-based
systems in a virtual built environment. Unlike most
of the previous vision and visual interpretation
researches, the vision and actions of the agent in our
project will be determined by applying human visual
perception simulation based on real physical
perception occurring in human brains.
As the first step we propose to link the
architectural cues and human vision simulation for
the development of an architectural cue recognition
system. After a careful research and consideration,
we select the Standard Feature Model of visual
cortex (SFM) for architectural cure recognition.
2 VISUAL PERCEPTION IN
BUILT ENVIRONMENT
Visual perception is always regarded as the most
important type of human perceptions in the built
environment by architects (Crosby, 1997) and
environmental psychologist (Arthur & Passini,
1992). In this article, we discuss the visual
perception as the background of human perception
simulation in the built environment.
The research of human beings’ visual perception
in the built environment starts from Gibson’s
Affordance theory (Gibson, 1966), which explains
how an object in the built environment is
(re)cognized as an object notion and its potential
usage in the brain. He interprets the built
environment as a set of various affordances, which
are the units of a human being’s (re)cognition. With
a motivation, the visual stimuli, the light pattern of
an object, is (re)cognized as a visual affordance
according to the “schemata” of this object notion in
the brain.
Based on Gibson’s theory, Hershberger
(Hershberger, 1974) develops the mediational theory
of environmental meaning. He splits the notion of
schemata into two kinds of knowledge explicitly.
One is the linkage from the light pattern of the
385
Chen Q., SUN C. and de VRIES B. (2009).
HUMAN VISION SIMULATION IN THE BUILT ENVIRONMENT.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 385-388
DOI: 10.5220/0001768103850388
Copyright
c
SciTePress
object to the object notion in the brain. The other is
the linkage from the object notion to its potential
usage.
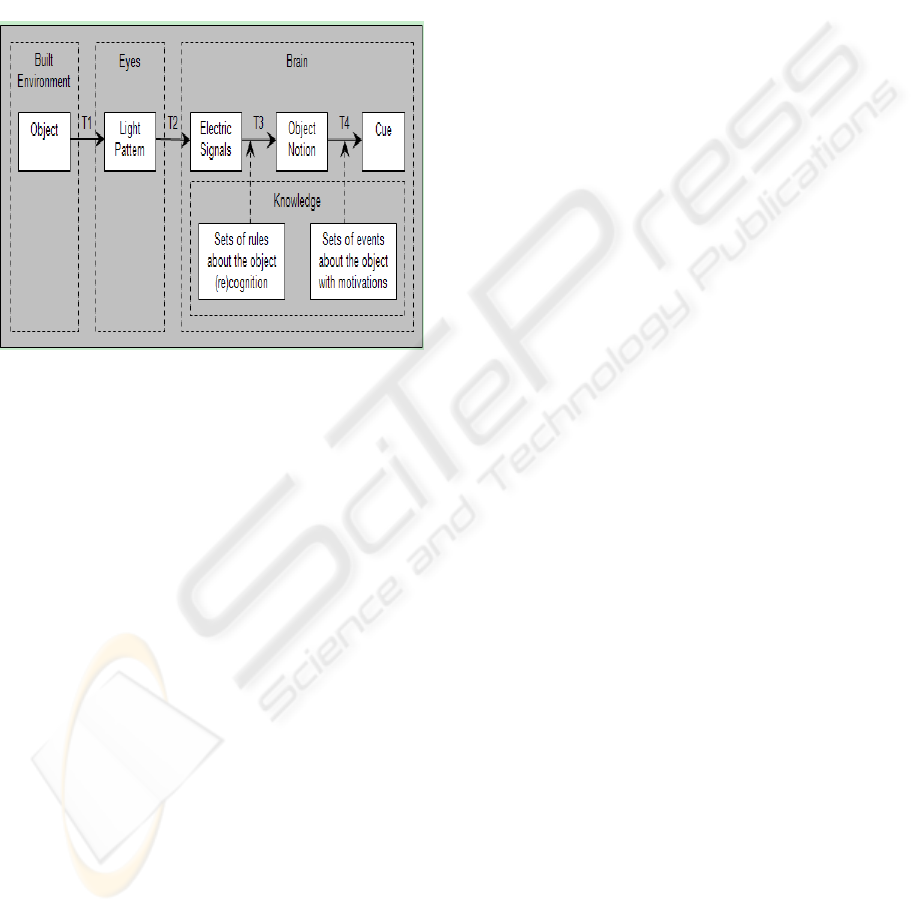
With more biological support, Lam (Lam, 1992)
explains the visual perception as an active
information-seeking process directed and interpreted
by the brain, which can be explained in four
transitions: T1, T2, T3, and T4 between five
concepts: Object, Light Pattern, Electric Signals,
Object Notion, and Cue (Figure.1).
Figure 1: Visual perception process.
Through the above process, some objects in built
environment are selectively perceived by human
beings as cues for the specific motivation. In the
following introduction on the human visual
perception simulation, the object, the transition T1,
the light pattern, the transition T2, and the electric
signals are compacted as an image input in pixel grid.
The simulation focuses on the transition T3, namely
from the pixel grid images to object notions.
3 STANDARD FEATURE MODEL
In recent years, some researchers turned back to look
at the object recognition problem from the biology
science side, and obtained very good results. Among
them, Serre developed a hierarchical system which
can be used for the recognition of complex visual
scenes, called SFM (Standard Feature Model of
visual cortex) (Serre et al., 2004, 2007). The system
is motivated by a number of models of the visual
cortex. Earlier, object recognition models aimed at
improving the efficiency of the algorithms, optimize
the representation of the object or the object
category. Not much attention was focused on the
biological features for higher complexity, not to
mention applying the neurobiological models of
object recognition to deal with real-world images.
The SFM model follows a theory of the feed
forward path of object recognition in the cortex,
which accounts for the first 100-200 milliseconds of
processing in the ventral stream of the primate visual
cortex (Riesenhuber et al., 1999); (Serre et al., 2005).
The SFM model tries to summarize what most of the
visual neuroscientists agree on: firstly, the first part
of visual processing of information in the primate
cortex follows a feed-forward way. Secondly, the
whole visual processing is hierarchical. Thirdly,
along this hierarchy the receptive fields of the
neurons will increase while the complexity of their
optimal stimuli will increase as well. Last but not
least, the modification and the learning of the object
categories can happen at all stages.
In the SFM model there are four layers, each
containing one kind of computational units. There
are two kinds of computational units, namely S
(simple) units and C (complex) units. The function
of the S unit is to combine the input stimuli with
Gaussian-like tuning as to increase object selectivity
and variance while the C unit aims to introduce
invariance to scale and translation. We simply call
the four layers as S
1
, C
1
, S
2
, and C
2
. A brief
description of the functions, input and output to the
four layers are listed in Table 1.
This biological motivated object recognition
system has been proven to be able to learn from few
examples and give a good performance. Moreover,
this generic approach can be used for scene
understanding. Last but not least, the features
generated by the model can work with standard
computer vision techniques; furthermore it can be
used as a supporting tool to improve the
performance of those computer vision techniques.
4 EXPERIMENT AND FINDING
There are different cues in the built environment,
which can be divided into three groups, namely non-
fixed cues, semi-fixed cues and fixed cues. Non-
fixed cues are defined as a type of information
perceived from the dynamic objects. Objects like
maps, signage, and different decorations are semi-
fixed cues, and the architectural cues are fixed cues.
We conducted two experiments applying the
SFM model to training sets for architectural cues
recognition. Sets of images of scenes containing
architectural cues are used as the training examples.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
386
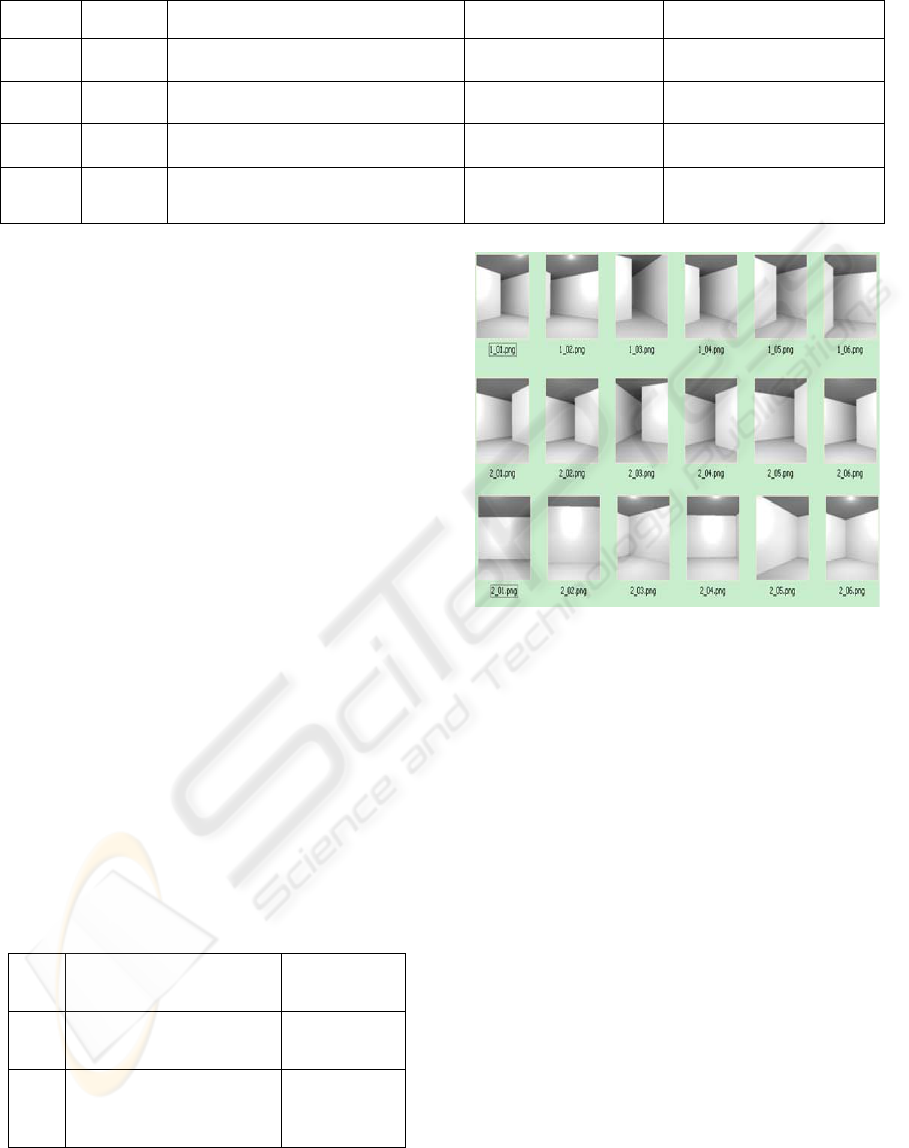
Table 1: Brief description of the four layers of the SFM model.
Layer
number
Brief actions Input Output
S
1
1
Apply Gabor filters to the input, obtain
maps of orientations and scales
Gray-scale images
maps of different positions,
scales, and orientations
C
1
2
Use a max operation, obtain the position
invariant features for each band
Bands of maps from S
1
Position invariant features for
each band (C
1
features)
S
2
3
Pool C
1
features in patches (different
scales in the same orientation )
Image patches at all
positions from C
1
S
2
patches
C
2
4
Combine a max operation and the S
2
patches, find the scale invariant features
S
2
patches
Position & scales invariant
features
(C
2
features)
In the first experiments, flat-shaded images of
simple scenes consisting of a room and a doorway
were used as training images. We aimed to test
whether the SFM features are sufficient to distinct
the difference between the walls and the doorways.
Images containing a doorway are used as positive
examples while images containing walls as negative
examples. A good result was achieved using this set
of images (higher than 90%).
In the second set of training images, the test
scenes where rendered using different materials and
shadows, to add an additional level of realism. A
light source is fixed in the middle of the ceiling for
each of the room. To standardize the examples, all
the doorways have similar width and height. Some
samples for the second set of the training images are
shown in Figure 2. The first two rows show the
examples of the doorway (the doorway can be
designed to the left of the wall, or to the right of the
wall), with the last row showing examples of the
wall. Table 2 presents the results of the first
experiment with two sets of training examples of
standardized input.
Furthermore, we explored the effect of other
parameters: we find that the width of the doorway,
the shape of the room and the proportion of the
width of the doorway and the room can affect the
distinction.
Table 2: Results of the first experiment.
Input samples Classification
1 Single room with doorway >90%
2
Assigned with materials
and light source
>80%
Figure 2: Samples for the first experiment.
In the second experiment, an additional simple
building element was added to the scenes: next to
the doorways from the first experiment, the test
scenes now also contained doors. We aim to test the
distinction between the door and the wall, the
doorway and the wall, the door or doorway and the
wall, finally the door and the doorway. Samples for
this experiment of the training images are shown in
Figure 3. In Figure 3, three types of architectural
cues are shown in rows sequentially, namely door,
doorway and wall. We chose images of door as
positive example and images of wall as negative
examples when we aim to use SFM to test the
distinction between door and wall.
The results of this second experiment were a
lower percentage of successful recognitions. Table 3
shows the samples and the results. It is quite clear
from this table that the SFM gives good distinction
between door and wall, door or doorway and wall,
and doorway and wall. However it cannot find
efficient distinction for the recognition between door
and doorway; in other word the distinctions between
the features extracted for door and doorway are too
subtle for efficient recognition.
HUMAN VISION SIMULATION IN THE BUILT ENVIRONMENT
387
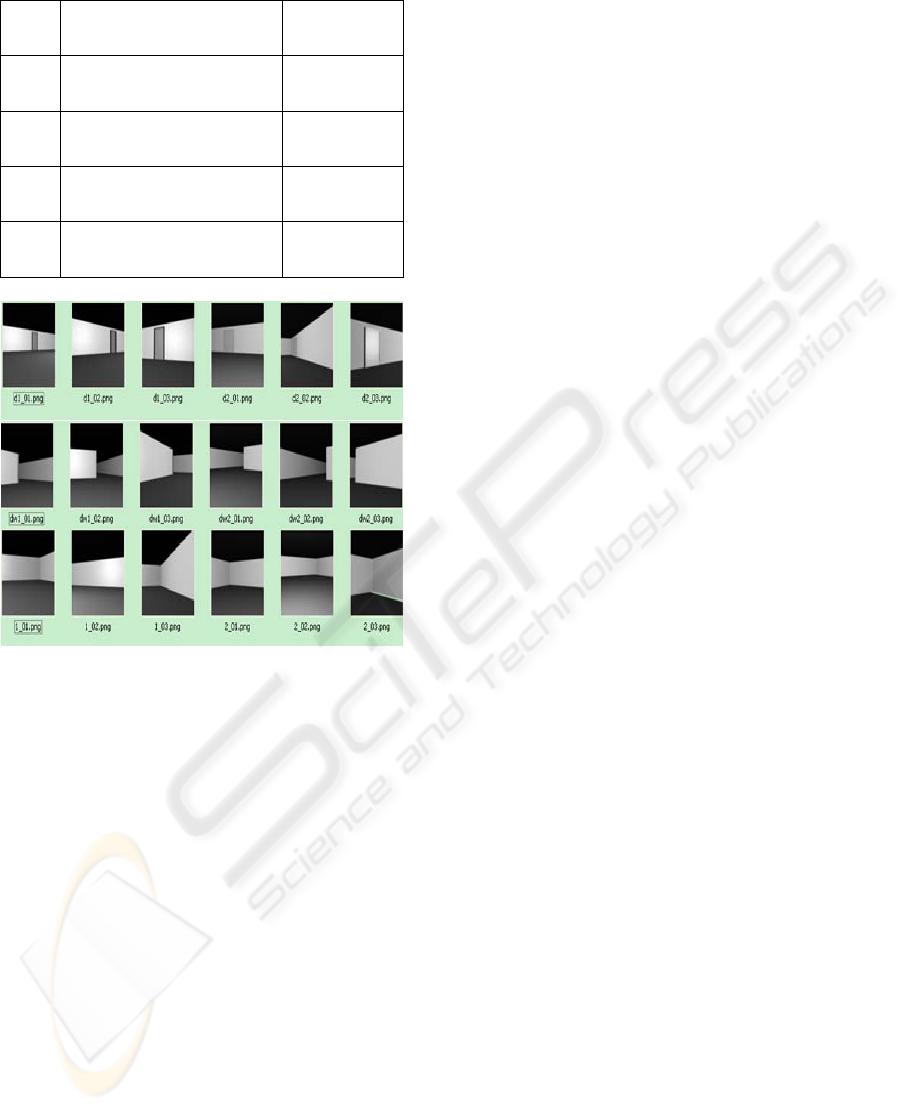
Table 3: Results of the second experiment.
Distinction Classification
1 Door & Wall 91.66%
2 Doorway & Wall 83.33%
3 Door or Doorway & Wall 95.75%
4 Door & Doorway 66.67%
Figure 3: Samples for the second experiment.
5 DISCUSSION AND
FURTHER WORK
Based on the findings, we conclude that a limited
recognition can be achieved using SFM-based
features for architectural cue recognition. Our
interpretation of these results is that the visual
difference between doors and doorways are too
subtle to serve as a significant discrimination factor
for the SFM.
Our aim is to simulate real human vision
including its limitations. The SFM model deviates
considerably from real human performance.
Therefore we will research a probabilistic approach
that allows us to estimate vision variables for object
recognition from experiments with real humans. We
hope to report this in the near further.
REFERENCES
Arthur, P., & Passini, R., 1992. Wayfinding: People, Signs,
and Architecture. New York: McGraw-Hill Book
Company.
Burl, M., Weber, M., & Perona, P., 1998. A probabilistic
approach to object recognition using local photometry
and global geometry. Proc. ECCV (pp. 628-641).
Crosby, A. W., 1997. The measure of reality:
Quantification and Western society 1250-1600.
Cambridge: University Press.
Gibson, J. J., 1966. The senses considered as perceptual
systems. Boston: Houghton Mifflin.
Hershberger, R. G., 1974. Predicting the meaning of
architecture, in Jon Lang et al. (Eds.), Designing for
Human Behavior: Architecture and the Behavioral
Sciences (pp. 147-156). Stroudsburg: Dowden,
Hutchinson and Ross.
Lam, W. M. C., 1992. Perception & Lighting as
formgivers for architecture. New York: Van Nostrand
Reinhold.
Riesenhuber, M., & Poggio, T., 1999. Hierarchical Models
of Object Recognition in Cortex, Nature Neuroscience,
vol. 2, no. 11 (pp.1019-1025).
Serre, T., & Riesenhuber, M., 2004. Realistic Modeling of
Simple and Complex Cell Tuning in the HMAX
Model, and Implications for Invariant Object
Recognition in Cortex,” CBCL Paper 239/AI Memo,
Massachusetts Inst. of Technology, Cambridge.
Serre, T., Kouh, M., Cadieu, C., Knoblich, U., Kreiman,
G., & Poggio, T., 2005. A Theory of Object
Recognition: Computations and Circuits in the Feed
forward Path of the Ventral Stream in Primate Visual
Cortex. AI Memo/CBCL Memo.
Serre, T., Wolf, L., & Poggio, T., 2004. A new
biologically motivated framework for robust object
recognition, CBCL Paper #243/AI Memo #2004-026,
Massachusetts Institute of Technology, Cambridge,
MA.
Serre, T., Wolf, L., Bileschi, S., Riesenhuber, M., &
Poggio, T., 2007. Robust Object Recognition with
Cortex-Like Mechanisms, IEEE Transactions on
pattern analysis and machine intelligence (pp.411-426).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
388
