
ADVANCED PLAYER ACTIVITY RECOGNITION BY
INTEGRATING BODY POSTURE AND MOTION INFORMATION
Marco Leo, Tiziana D’Orazio, Paolo Spagnolo and Pier Luigi Mazzeo
Institute of Intelligent Systems for Automation, Italian National Council Research, via Amendola 122/d, Bari , Italy
Keywords:
Human pose estimation, Contourlet transform, Neural networks, Soccer player activity recognition.
Abstract:
Human action recognition is an important research area in the field of computer vision having a great number of
real-world applications. This paper presents a multi-view action recognition framework able to extract human
silhouette clues from different synchronized static cameras and then to validate them introducing advanced
reasonings about scene dynamics. Two different algorithmic procedures have been introduced: the first one
performs, in each acquired image, the neural recognition of the human body configuration by using a novel
mathematic tool named Contourlet transform. The second procedure performs, instead, 3D ball and player
motion analysis. The outcomes of both procedures are then properly merged to accomplish the final player
activity recognition task. Experimental results were carried out on several image sequences acquired during
some matches of the Italian Serie A soccer championship.
1 INTRODUCTION
Human action recognition aims at automatically as-
certaining the activity of a person, i.e. to identify
if someone is walking, dancing, or performing other
types of activities. It is an important area of research
in the field of computer vision and the ever growing
interest in it is fueled, in part, by the great number
of real-world applications such as surveillance scenar-
ios, content-based image retrieval, human-robot inter-
action, sport video analysis,smart rooms etc.
Human action recognition has been a widely stud-
ied topic and extensive reviews can be found in
(Weiming et al., 2004) and (Agarwal and Triggs,
2006). Human activity recognition approaches are
categorized on the basis of the representation of the
human body: representation can be extracted either
from a still image or a dynamic video sequence.
In general, performing human action recognition
from video sequences requires complex models for
understanding the dynamics (Gorelick et al., 2007),
(Jhuang et al., 2007), (Niebles et al., 2008), (Liu
et al., 2008). On the other side recent studies demon-
strated that static human pose encapsulates many use-
ful clues for recognizing the ongoing activity (Iki-
zler and Duygulu, 2007), (Goldenberg et al., 2005),
(Lu and Little, 2006), (Zhang et al., 2007), (Thurau,
2007).
Unfortunately, due to possible large variations in
body appearance, both static and dynamic representa-
tions have a considerable failure rate unless specific
databases are used.
In this paper we introduce a new multi-view ac-
tion recognition system that extracts human silhou-
ette clues from different synchronized static cameras
and then it validates them by introducing some rea-
sonings about scene dynamics. The experimental re-
sults were carried out on several image sequences ac-
quired during some matches of the Italian “Serie A”
soccer championship.
2 SYSTEM OVERVIEW
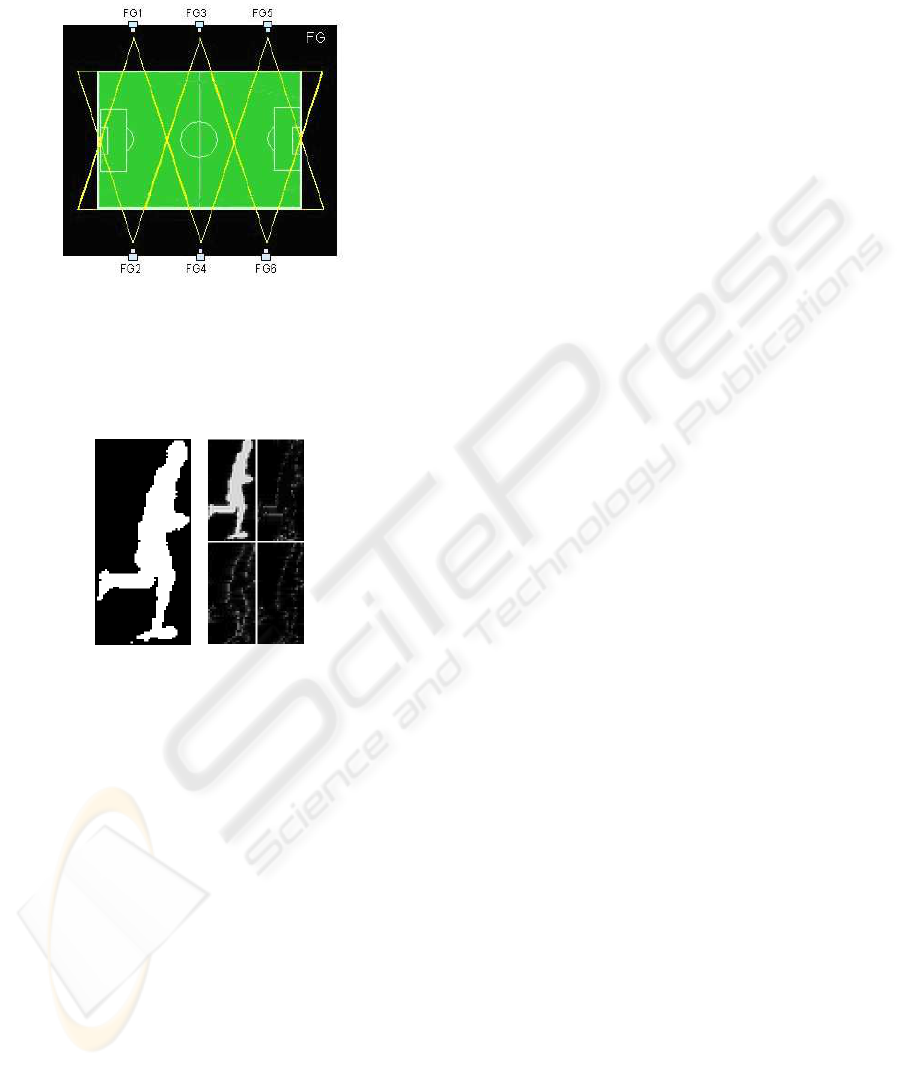
Six high resolution cameras (labeled as FGi, where i
indicates the i − th camera) have been placed on the
two sides of the pitch assuring double coverage of al-
most all the areas by either adjacent or opposite cam-
eras. In figure 1 the location of the cameras is shown.
The acquired images are transferred to six processing
nodes by fiber optic cables. The acquisition process
is guided by a central trigger generator that guaran-
tees synchronized acquisition between all the cam-
eras. Each node, using two hyper-threading proces-
sors, records all the images of the match on its internal
261
Leo M., D’Orazio T., Spagnolo P. and Luigi Mazzeo P. (2009).
ADVANCED PLAYER ACTIVITY RECOGNITION BY INTEGRATING BODY POSTURE AND MOTION INFORMATION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 261-266
DOI: 10.5220/0001754002610266
Copyright
c
SciTePress
storage unit, displays the acquired images and, simul-
taneously, processes them with parallel threads, in an
asynchronous way with respect to the other nodes.
Figure 1: The location of the cameras around the pitch.
The six processing nodes, are connected to a cen-
tral node, having the supervisor function. It synchro-
nizes data coming from nodes and performs high level
processing.
Figure 2: The binarized player silhouette (on the left) and
its Contourlet representation (on the right).
Each node uses a background subtraction algo-
rithm for motion detection. It is based on a modi-
fied version of a well known approach for background
creation and maintenance (Kanade et al., 1998). In-
formation relative to moving objects is then sent to
two parallel processing threads: the first one per-
forms human blob detection, classification (Spagnolo
et al., 2007) and tracking (D’Orazio et al., 2007) as
well as neural player activity recognition using static
representation by Contourlet transform; the second
one performs ball detection by means of a correla-
tion based approach using six reference sets contain-
ing some ball examples acquired in different positions
with respect to the camera (near, far, very far) and in
different lighting conditions (sunny days, evening or
cloudy days).
At each trigger pulse, the outcomes of the algo-
rithmic procedures running on each processing node,
are sent to the central node that analyzes them in or-
der to localize the ball and the players on a virtual
play-field, to compute their trajectories and to vali-
date player activity by using motion information.
3 PLAYER BODY POSTURE
ESTIMATION
The first step in the proposed framework deals with
the recognition of the player body configuration (pos-
tures) in each of the different cameras. For this pur-
pose, in this paper, a learning based approach is used:
first of all the player silhouettes are binarized, mir-
rored (only those coming from the three cameras FG2,
FG4 and FG6) in order to use the same left-right label-
ing system for body configuration, re-sized to avoid
scaling effects, and described by using Contourlet co-
efficients that are extracted via a double iterated filter
bank structure providing a flexible multi-resolution,
local and directional image expansion (Do and Vet-
terli, 2005).
The new Contourlet representation is then pro-
vided as input to a back propagation neural network
able to recognize seven different human configura-
tions associated to seven player activities: walking,
running left, running right, running front-back, still,
shooting left, shooting right.
The neural network architecture (experimentally
set) consists of three processing layers: 30 hid-
den neurons with sigmoidal activation functions and
6 output neurons with softmax activation functions
(Bishop, 1995) are used. The neural output values
are managed as follows: the greatest output value is
considered and if it is greater than th = 0, 5 the input
patch is labeled by the corresponding activity, other-
wise it is labeled as undetermined. In figure 2, on the
left the initial binary silhouette of a running player is
reported whereas on the right the relative Contourlet
representation is shown.
4 BALL AND PLAYER
TRAJECTORY COMPUTATION
The second algorithmic procedure runs on the pro-
cessing unit with supervisor function. The supervisor
makes use of a virtual play-field (having the same di-
mension of the real play field) to project extracted in-
formation: in particular the player and referee data
are projected onto the virtual play-field by homo-
graphic transformation assuming that their feet are al-
ways in contact with the ground. Anyway, the pro-
jection of the same player using data relative to dif-
ferent cameras are not coincident due to the different
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
262
segmentations into the image planes caused by differ-
ent appearances of the same player (different position
with respect the camera, different lighting conditions,
shadows and so on). To overcome this drawback, the
mid-point of the line connecting the different projec-
tions of the player in the virtual play-field has been
considered for further processing.
The projection of the ball position in to the virtual
play-field requires, instead, a different procedure con-
sidering that the ball is not always in contact with the
ground. The 3D ball position has to be then firstly re-
covered by triangulation (if ball information coming
from two opposite or adjacent views is available) and
then its projection onto the virtual play field can be
performed.
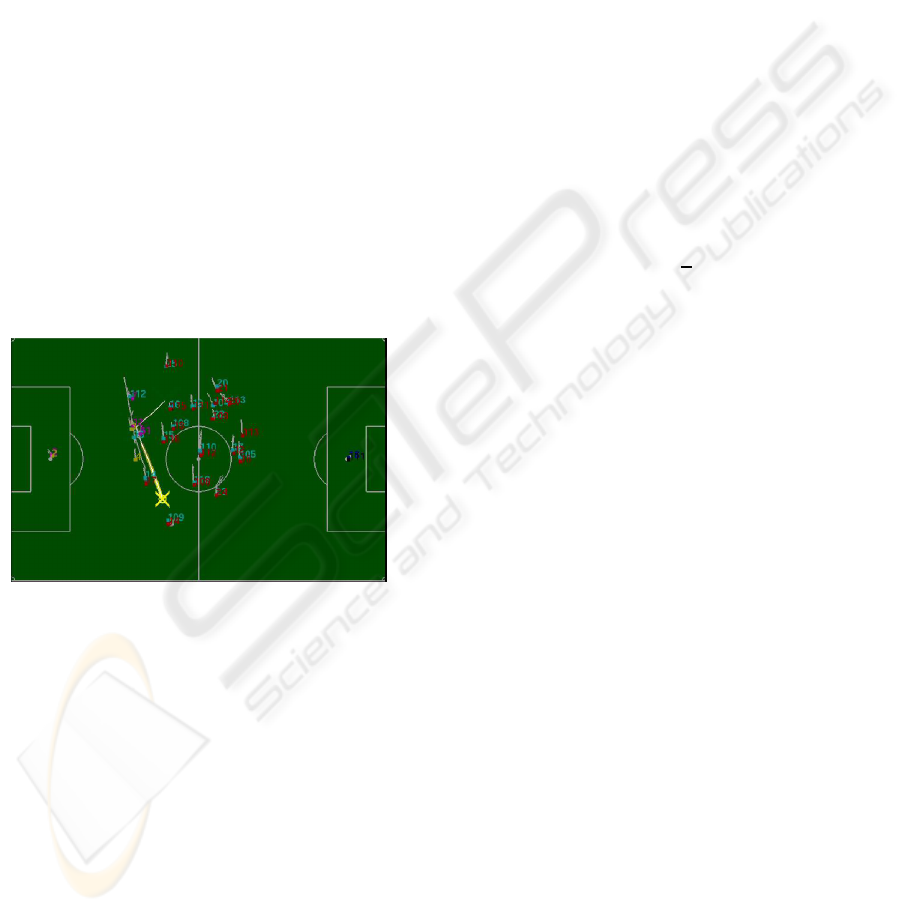
In figure 3 the virtual play-field is reported. The
red and cyan rectangles indicate the player positions
computed by merging data coming from two opposite
or adjacent views (relative IDs assigned from nodes
are also reported) whereas the ball position is indi-
cated by the yellow cross. The white lines behind
each object indicate recent ball and players displace-
ments.
Starting from the estimated ball and players posi-
Figure 3: The virtual play-field.
tions their temporal trajectories can be computed. The
player trajectories in the virtual play-field cannot be
mathematically modeled by straight lines or curves;
they vary continuously in an unpredictable way and
then they can be represented only collecting the player
positions into the play-field.
For the ball, instead, trajectories in the virtual
play-field can be approximated by straight lines: this
allows the system to predict the successive positions,
to recover missed intermediate ones, and to introduce
high level reasonings useful to understand the soccer
game developing. For the sake of precision we have
to explain that we dispose of both 3D and 2D ball tra-
jectories. In order to detect shots, as abrupt changes
of trajectories, we consider in this paper only 2D tra-
jectories, obtained by projecting the 3D ball positions
in to the virtual play-field. This simplification allows
the system to avoid false shot detections when there
are ball rebounds on the field.
5 MULTI-VIEW PLAYER
ACTIVITY RECOGNITION
The outcomes of the algorithmic procedures de-
scribed in the sections 3 and 4 are, finally, given as
input to a higher level functional step running on the
supervisor unit that performs a multi-view player ac-
tivity recognition. To do that, first of all, the supervi-
sor processing unit merges body posture information
coming from different views of the same player: the
M available estimation scores extracted by the single
view procedure (one for each camera acquiring the
considered player) for the i − th player are averaged
to obtain k values of MPV (Multi-view Probability
Value) :
(MPV)
k
= P(X
k
|z
1
...z
M
) =
1
n
M
∑
1
p(X
k
|z
j
) k = 1, ...N
where X is the player posture class, z
i
are the sin-
gle view estimated configurations and N indicates the
maximum number of body configurations classes to
be recognized. In this way a global estimation score
is estimated for each of the k configuration classes.
The problem becomes now how to decide which body
configuration class has to be associated to the i−th on
the basis of the relative available P
k
with k = 1, ...N .
To solve this problem a preliminary statistical
evaluation of the neural outcomes is done: the val-
ues relative to both correct and incorrect occurrences
during a preliminary experimental phase are consid-
ered and they are then used to estimate the relative
gaussian probability distributions. This demonstrates
that the most probable values in case of correct body
configuration estimations in a single view are close to
0.85, whereas in case of wrong estimations they are
close to 0.5.
Starting from this statistical consideration a multi-
view decision rule, based on available MPVs, is intro-
duced: the player’s body configuration K is associated
to the i-th player if
{(K = arg max
k=1,...6
(MPV)
k
) ∧ ((MPV)
K
> th)∧
∧((MPV)
i
< thi = {1...N, i 6= K})
where th is the intersection point of the above esti-
mated pd fs. If these conditions are not simultane-
ously satisfied the considered player body configura-
tion is labeled as undetermined.
ADVANCED PLAYER ACTIVITY RECOGNITION BY INTEGRATING BODY POSTURE AND MOTION
INFORMATION
263
5.1 Integration of Motion Information
After that, a static multi-view player activity estima-
tion is available for each player in the scene and it
can be validated by using motion information. In par-
ticular ‘running’, ‘walking’ and ‘still’ activities are
validated by using motion information of the relative
player, whereas ’shooting’ activity is validated tak-
ing under consideration also the 3D ball trajectory. In
fact for an estimated ’still’ player the system checks
his motion: if, considering the last three frames, his
position in the virtual playing field does not signi-
ficatively change, the player activity is definitively la-
beled as ‘still’. The same approach, based on the anal-
ysis of the position changes into the play-field, is also
used for validating estimated ‘running’ and ‘walking’
players: in this case the estimated player body pos-
ture is validatedif player position (considering the last
three frames) changes according to the common run-
ning and walking velocity values for a human being
whereas running directions (left, right, front-back) are
validated considering the recovered player trajectory
into the play-field. In particular a player is validated
as ’walking’ if this velocity in the virtual play-field
varies between 3 km/h and 6 km/h; running activity is
instead validated if the velocity of the relative player
is greater than 6 km/h.
A quite different approach is finally used for vali-
dating estimated ’shooting’ players: in this case both
ball and player motion information are used. In fact,
’shooting’ player is validated if : 1) the 3D ball tra-
jectory indicates that the ball is really going away
from the considered player (as expected for the kick-
ing player) 2) the player is near (at lest 2 meters) to
P(x
s
, y
s
), i.e. the intersection point of two consecutive
validated ball trajectories.
In this way motion information helps to improve
player activityrecognition but, at the same time, could
solve some of the previously unclassified activity oc-
currences: in fact motion reasonings can be separately
applied to the different incoherent human body con-
figuration outcomes in order to point out the most
likely one.
Finally notice that in the case of incoherence be-
tween estimated player body configurations and mo-
tion information the relative player activity is defini-
tively labeled as ’undetermined’.
6 EXPERIMENTAL RESULTS
The proposed multi-steps method was applied to
several image sequences acquired during some
matches of the Italian “Serie A” championship.
Experiments were carried out on a set of 3500
different pairs of synchronized patches (7000 total
patches) relative to players acquired during differ-
ent soccer matches. These patches were prelimi-
narily labeled by a human operator who assigned to
each pair one of the seven considered activities: A-
Running right side; B-Running left side; C-Running
front-back; D-Walking; E-Still;F- Shooting left side;
G-Shooting right side.
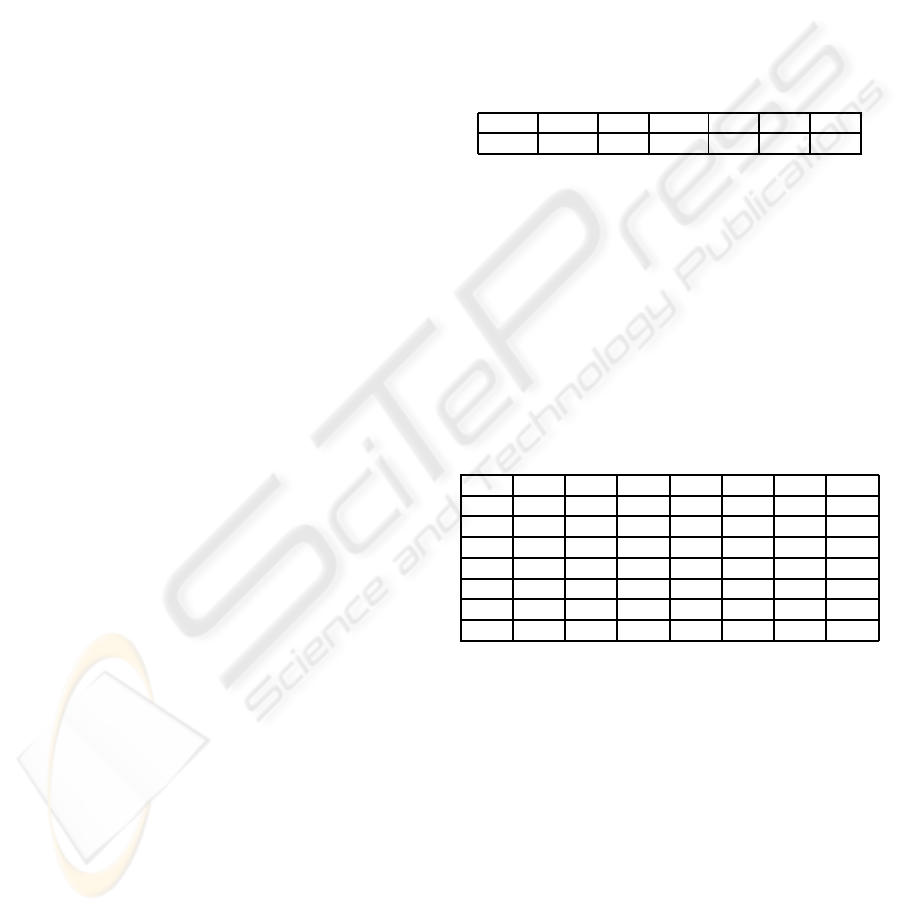
The ground truth relative to the 7000 patches is
reported in table 1.
Table 1: The ground truth relative to the 7000 considered
binary patches used in the experimental phase.
.
A B C D E F G
1680 1844 412 1410 756 476 422
The first step of the experimental phase concen-
trates on the recognition of the human activity on each
single image by using Contourlet representation and a
neural classifier as described in section 3.
The results of this first experiment are reported in
table 2. Because of lack of space the first row reports
the capital letters relative to each of the seven consid-
ered body configurations as in the above list.
Table 2: The scatter matrix relative to the first experiment
regarding the recognition of the player activity recognition
by single image.
A B C D E F G und.
1243 9 218 160 0 0 0 50
0 1624 0 111 108 0 0 1
0 0 305 33 25 29 0 20
0 0 14 1269 30 56 0 41
0 21 62 0 620 0 0 53
9 0 16 0 0 432 0 19
13 5 5 0 0 0 387 12
The experimental results reported in table 2 were
very encouraging: almost 84% of the testing patches
were automatically labeled by the system in the same
way as the human operator. Some miss-classifications
happened due to the similarity of appearance, un-
der certain conditions, of the body silhouettes rela-
tive to players performing different activities. For ex-
ample, in figure 4, three wrongly classified patches
are reported: the player on the left was classified as
running towards the camera by the human operator
whereas the automatic system consider him as run-
ning right. The player in the center was instead clas-
sified as running towards the camera by the human
operator whereas the automatic system classified him
as still. Finally, the player on the right was labeled as
kicking by the human operator and running right by
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
264
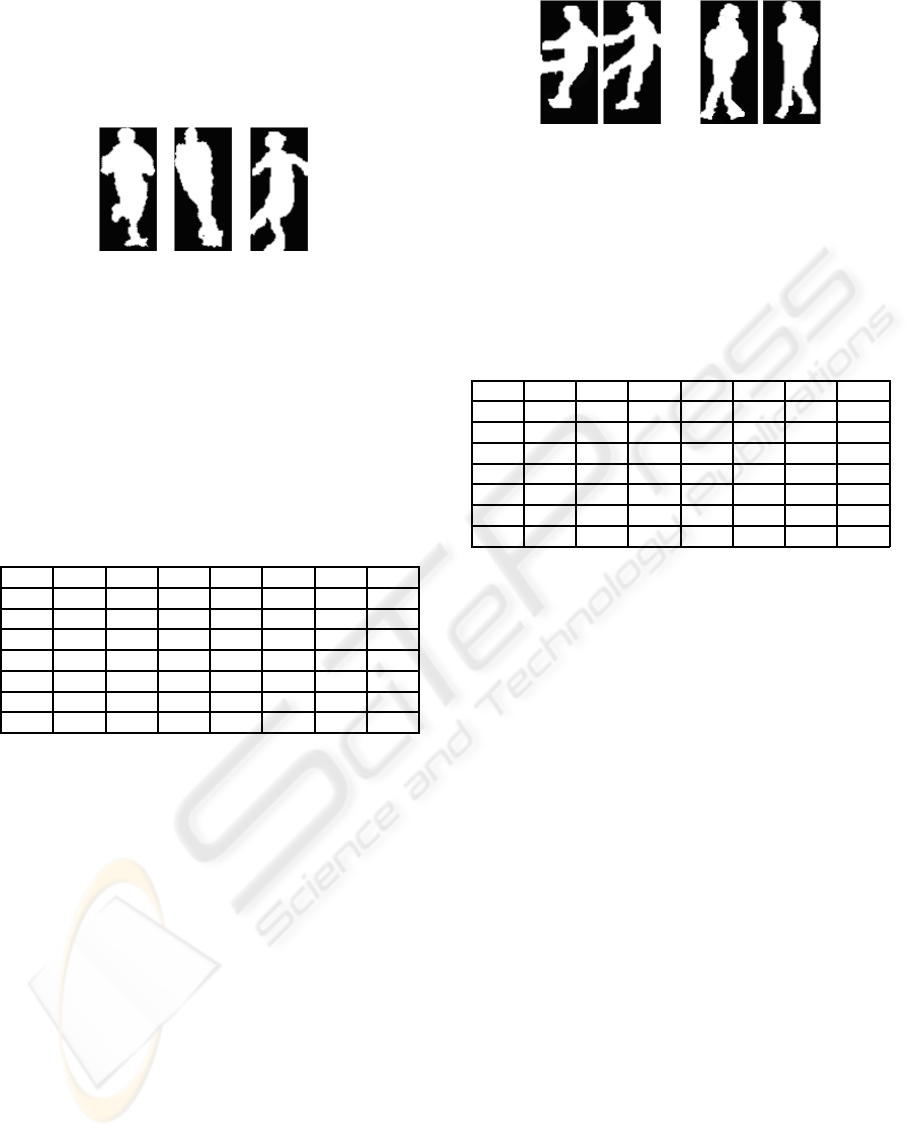
the automatic system. As you can see in this cases it
is not easy to definitivelydecide real player configura-
tions and then you have to consider that experimental
results strongly depend, on the operator that generated
the ground truth.
Figure 4: Three different cases where the proposed system
missrecognized player body configurations.
The activity data coming from this first experi-
mental step were then merged, for each pair of op-
posite cameras, by using the procedure described in
section 5. In table 3 the multi-view activity estima-
tion results on the 3500 pairs of binary patches are
reported.
Table 3: Activity recognition performance integrating in-
formation coming from different camera views. The test set
consists of 3500 pairs of binary patches.
A B C D E F G und.
822 2 3 2 0 0 5 6
0 890 0 12 9 6 0 5
0 0 186 2 8 7 0 3
0 0 10 666 7 8 0 14
0 9 5 0 345 0 0 19
0 0 3 0 0 227 0 8
5 0 3 0 0 0 199 4
More than 95% of the 3500 tested pairs were cor-
rectly recognized. Less than 2% of the tested patches
were not classified due to the ambiguities in the prob-
ability values provided by the neural algorithms run-
ning on the images coming from each camera.
In figure 5, the two pictures on the left report the
player’s silhouettes acquired by two opposite cam-
eras at a shot instant. In this case the analysis of
human body configuration performed on each view
agreed and they indicated that the player was shoot-
ing the ball with probability values respectively of
0.97 and 0.89. The two pictures on the right show,
instead, a case in which the procedure running on
each single view disagreed: one camera recognized
the player as walking (probability value 0.87) and the
other one as still (probability value 0.54). The multi-
view approach solved this ambiguity and labeled the
player walking as the human operator did. Finally,
the remaining 3% of the tested patches were miss-
classified.
Finally the validation procedure based on motion
information described in section 5.1 was tested in or-
Figure 5: Different pairs of patches containing the same
player acquired from different cameras.
der to verify its capability to improve player activity
recognition. The final results of the proposed player
activity recognition approach are then reported in ta-
ble 4.
Table 4: Activity recognition performance after validation
by motion information.
A B C D E F G und.
833 0 0 0 0 0 1 6
0 912 0 3 1 0 0 6
0 0 196 0 3 0 0 7
0 0 4 689 2 0 0 10
0 3 1 0 357 0 0 17
0 0 0 0 0 230 0 8
0 0 0 0 0 0 204 7
Introducing activity validation by motion informa-
tion drastically reduces both uncertainty occurrences
and increases correct classification. In figure 6 two
examples pointing out the benefits of using motion
information are reported. On the left two patches (ac-
quired from FG3 and FG4) are relative to a player
kicking the ball. The neural approach did not clas-
sify player activity because, for the patch on the left,
it rightly recognizes the player as shooting left but,
for the patch on the right, it erroneously classifies the
player as running left. Introducing reasonings about
motion and ball proximity the system verified that
both the ball was close to the player and the distance
of the player from the intersection point of the ball tra-
jectory was very small. For these reasons the player
was correctly classified as shooting the ball. On the
right, instead, the two patches are relative to a player
running right (acquired from FG5 and FG6). Unfor-
tunately both patches were classified as ”walking” by
the neural approach based on Contourlet representa-
tion (most probably due to perspective distortions).
The motion validation procedure did not validate the
player as walking due to his velocity on the pitch (9
km/h) and then his activity was considered as ’under-
mined’ avoiding a wrong classification.
Finally in figure 7 an example in which mo-
tion information did not solve miss-classification is
reported. The two players were classified as shooting
right by the multi-view approach described in section
5. Unfortunately the ball was very close to the play-
ADVANCED PLAYER ACTIVITY RECOGNITION BY INTEGRATING BODY POSTURE AND MOTION
INFORMATION
265

Figure 6: Two examples in which motion information over-
come drawback of the neural approach for player activity
recognition.
ers and it was going away from them and then both
of them were also validated as shooting right by the
procedure based on motion information integration.
The ground truth, instead, indicated that the ball was
kicked by the player having a white strip and that the
player with blue strip is instead just running right side.
Figure 7: An example in which motion information did not
solve activity miss-classification.
REFERENCES
Agarwal, A. and Triggs, B. (2006). Recovering 3d human
pose from monocular images. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 28(1):44–
58.
Bishop, C. M. (1995). Neural Networks for Pattern Recog-
nition. Oxford University Press.
Do, M. N. and Vetterli, M. (2005). The contourlet trans-
form: An efficient directional multiresolution image
representation. IEEE Transactions on Image Process-
ing, 14(12):2091–2106.
D’Orazio, T., Leo, M., Spagnolo, P., Mazzeo, P., Mosca, N.,
and Nitti, M. (2007). A visual tracking algorithm for
real time people detection. In Wiamis2007: Proceed-
ings of the International Workshop on Image Analysis
for Multimedia Interactive Services.
Goldenberg, R., Kimmel, R., Rivlin, E., and Rudzsky,
M. (2005). Behavior classification by eigen-
decomposition of periodic motions. IEEE transac-
tions on systems, man and cybernetics. Part C, Ap-
plications and reviews, 38(7).
Gorelick, L., Blank, M., Shechtman, E., Irani, M., and
Basri, R. (2007). Actions as space-time shapes. Trans-
actions on Pattern Analysis and Machine Intelligence,
29(12):2247–2253.
Ikizler, N. and Duygulu, P. (2007). Human action recogni-
tion using distribution of oriented rectangular patches.
In HUMO07, pages 271–284.
Jhuang, H., Serre, T., Wolf, L., and Poggio, T. (2007). A
biologically inspired system for action recognition. In
ICCV07, pages 1–8.
Kanade, T., Collins, R., Lipton, A., Burt, P., and Wixson, L.
(1998). Advances in cooperative multi-sensor video
surveillance. In Proceedings of DARPA Image Under-
standing Workshop, volume 1, pages 3–24, November.
Liu, J., Ali, S., and Shah, M. (2008). Recognizing human
actions using multiple features. In International Con-
ference on Computer Vision and Pattern Recognition
CVPR08.
Lu, W. and Little, J. (2006). Simultaneous tracking and
action recognition using the pca-hog descriptor. In
CRV06, pages 6–6.
Niebles, C., Wang, H., and Fei-Fei, L. (2008). Un-
supervised learning of human action categories us-
ing spatial-temporal words. International Journal of
Computer Vision, in press:2247–2253.
Spagnolo, P., Mosca, N., Nitti, M., and Distante, A. (2007).
An unsupervised approach for segmentation and clus-
tering of soccer players. In IMVIP2007: Proceedings
of the International Machine Vision and Image Pro-
cessing Conference.
Thurau, C. (2007). Behavior histograms for action recogni-
tion and human detection. In HUMO07, pages 299–
312.
Weiming, H., Tieniu, T., Liang, W., and Steve, M. (2004).
A survey on visual surveillance of object motion and
behaviors. IEEE transactions on systems, man and
cybernetics. Part C, Applications and reviews, 34(3).
Zhang, L., Wu, B., and Nevatia, R. (2007). Detection and
tracking of multiple humans with extensive pose artic-
ulation. In ICCV07, pages 1–8.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
266
