
SYMMETRY-BASED COMPLETION
Thiago Pereira
1
, Renato Paes Leme
2
, Luiz Velho
1
and Thomas Lewiner
3
1
Visgraf, IMPA, Brazil
2
Department of CS, Cornell, U.S.A.
3
Matmidia, PUC–Rio, Brazil
Keywords:
Image completion, Inpainting, Symmetry detection, Structural image processing.
Abstract:
Acquired images often present missing, degraded or occluded parts. Inpainting techniques try to infer lacking
information, usually from valid information nearby. This work introduces a new method to complete missing
parts from an image using structural information of the image. Since natural and human-made objects present
several symmetries, the image structure is described in terms of axial symmetries, and extrapolating the sym-
metries of the valid parts completes the missing ones. In particular, this allows inferring both the edges and
the textures.
1 INTRODUCTION
Acquired images are generally incomplete, either due
to the degradation of the media, like old paintings,
pictures or films, due to occlusion of scene parts from
undesired objects or due to channel losses in digital
image transmission. To overcome those issues, in-
painting techniques try to complete missing regions
of an image. Since the ground truth is unknown in
real applications, the inferred content must be consis-
tent with the image as a whole.
This implies two steps in the inpainting pipeline:
analysis and synthesis. The analysis step determines
the characteristics of the image relevant to comple-
tion. The synthesis step then uses the gathered knowl-
edge to extend the valid region. Local methods ana-
lyze the boundary of the invalid region and the synthe-
sis is usually performed by diffusion-like processes to
propagate the boundary’s color. However, the diffu-
sion step may blur the inpainted region, harming the
texture coherency. Other methods segment the image
in texture-coherent regions and synthesize a new tex-
ture to fill the hole, based on the closest match with
the boundary texture. Although this solves the blur
problem, it may not respect the global structure of the
image. In particular, completing very curved shapes
or big holes remains an issue.
In this work, we propose to exploit the global
structure of the image for inpainting (see Figure 7).
More precisely, we estimate the image’s symmetries
and complete the missing part by their valid symmet-
ric match. Since symmetry is an important coherency
criterion both for natural and human-made objects, its
analysis reveals much of the relevant image structure.
The present paper restricts to axial symmetries of the
image’s edges, and may be easily extended to entail
more general transformations and features. However,
nice results, including textures, can already be ob-
tained with these restrictions. This research started
as a project for the course ”Reconstruction Methods”
at IMPA in fall 2007.
2 RELATED WORK
Since this work applies symmetry detection to inpaint
missing regions of an image, we’ll first review pre-
vious method of image restoration followed by works
on symmetry, both from computer vision and geomet-
ric modelling.
2.1 Image Restoration
Inpainting methods can be categorized according to
the extent of the region the analysis and synthesis op-
erations work on. Early approaches use local analysis
to extend the valid image from a small neighborhood
around the missing region. In particular, (Bertalmio
et al., 2000) propagate image lines (isophotes) into
the missing part using partial differential equations,
interleaving propagation steps with anisotropic dif-
fusion (Perona and Malik, 1990). This extends the
smooth regions while still respecting image edges.
(Petronetto, 2004) created an inpainting algorithm
inspired by heat diffusion to improve propagation.
These local methods work very well for small holes
39
Pereira T., Paes Leme R., Velho L. and Lewiner T.
SYMMETRY-BASED COMPLETION.
DOI: 10.5220/0001655900390045
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-67-8
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
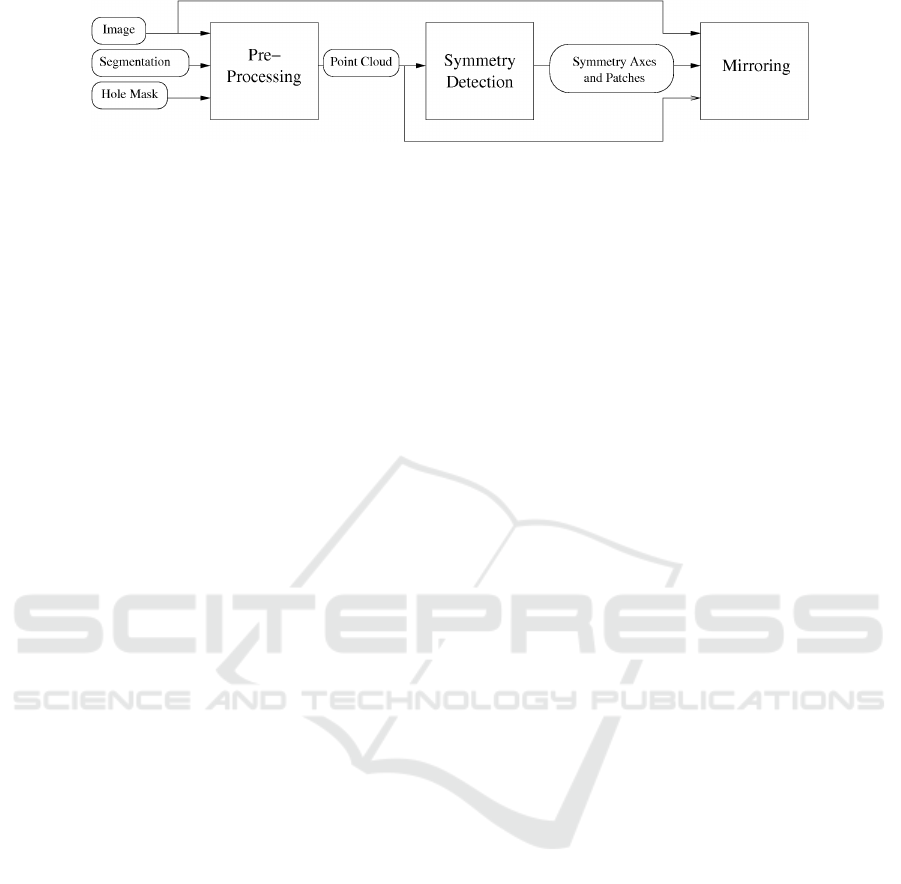
Figure 1: The input image is pre-processed to extract a sampling of the edges. The symmetry detection extracts the structure
of this point cloud, and these symmetries are used for completing the missing parts by mirroring adequate valid parts.
but introduce blur when dealing with large regions,
which harms the quality of results on regions with
high frequencies and texture. Global analysis try to
locate relevant regions in the entire image, or even
in a large image database (Hays and Efros, 2007) to
handle very large missing regions if similar objects
are present in the database.
On the synthesis side, several approaches consider
completion as a texture synthesis problem: instead
of completing at a pixel level, these methods iden-
tify small regions of the hole to be filled first and
search for a best match throughout the image. The
matched region is copied and blended with the sur-
roundings. In particular, (Efros and Freeman, 2001)
create new textures by putting together small patches
from the current image. (Drori et al., 2003) and (Cri-
minisi et al., 2003) complete the holes by propagat-
ing texture and contours. These methods preserve lo-
cal structure of the image, but may fail to propagate
global structure of the image like bending curves. In
this work, we propose a technique that identifies the
object structure and boundaries and incorporate this
information in the completion process. We argue that
structure from object symmetry can be used for in-
painting in more complex examples.
2.2 Symmetry Detection
Early works in symmetry detection deal with global
and exact symmetries in point sets (Wolter et al.,
1985) based on pattern-matching algorithms. This
restricts their applicability to image processing since
most symmetries found in nature or human-made are
not exact or might be slightly corrupted by noise.
(Zabrodsky et al., 1995) measures the symmetry of a
shape by point-wise distance to the closest perfectly
symmetric shape. The level of symmetry can also
be measured by matching invariant shape descriptors,
such as the histogram of the gradient directions (Sun,
1995), correlation of the Gaussian images (Sun and
Sherrah, 1997) or spherical functions (Kazhdan et al.,
2004). Such symmetry measures work well for de-
tecting approximate symmetry, although they are de-
signed for global symmetry detection.
Recently, (Loy and Eklundh, 2006) used the
Hough Transform to identify partial symmetries, i.e.,
symmetries of just one part of the object. Such partial
symmetries can also be obtained by partial matching
of the local geometry (Gal and Cohen-Or, 2006). In
particular, (Mitra et al., 2006) accumulates evidences
of larger symmetries using a spatial clustering tech-
nique in the symmetry’s space. The technique used in
this paper is close to (Mitra et al., 2006). However,
we focus on incomplete symmetries due to occlusion
in images, and thus adapted their symmetry detection
for 2D shapes.
Symmetries have been used to complete shapes
in different contexts. For example, (Thrun and Weg-
breit, 2005) detects symmetries in 3D range image to
complete based on a search in the symmetry space,
and complete the whole model by a global reflection.
(Zabrodsky et al., 1993) uses a symmetrization pro-
cess to enhance global symmetry, even with occluded
parts. (Mitra et al., 2007) achieves similar results for
3D shapes. However, these techniques do not handle
partial symmetries or affect parts of a 2D image that
are not missing.
3 METHOD
We start this section with a brief overview of the pro-
posed method followed by the details of our process.
3.1 Overview
The proposed method is composed of two main steps:
symmetry detection, corresponding to the image anal-
ysis, and mirroring for synthesis of lacking informa-
tion. The interactions between these steps is schema-
tized in Figure 1 and illustrated in Figure 2. The in-
put image contains a user-defined mask around the in-
valid region. A simple pre-processing extracts from
the image a structured sampling of its edges (see Fig-
ure 2(a)-(d)) from which the normal and curvature is
computed. Then, the symmetry detection step identi-
fies the many symmetry axes present in the object, as
seen in 2(f). Finally, the completion step chooses the
symmetry axis that best fits the missing region and
mirrors the texture and edges of the valid parts into
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
40

(a) Input texture. (b) Segmentation. (c) Hole mask. (d) Edge image.
(e) Edge’s points. (f) Axes and patches. (g) Mirroring. (h) Final image.
Figure 2: Illustration of the pipeline of Figure 1.
the hole (Figure 2(g)-(h)). These steps are detailed
below.
3.2 Pre-processing: Object Extraction
Object identification is a well studied problem. Many
algorithms have been proposed to segment images.
While extremely relevant to our method, segmenta-
tion is not the focus of this work. As such, we assume
receiving a segmented image as input. Symmetry ex-
traction should ideally take into account the border as
well as the interior of the image’s objects. We use
here only the border (edge) information for the sake
of simplicity. Moreover, we represent those edges by
points. Although it may lose some connectivity infor-
mation, it permits a versatile representation and fits
better for adapting geometric modeling techniques for
symmetry detection. Therefore, we perform an edge
detection on the input image through a difference of
Gaussians implemented in the GIMP package (Mattis
and Kimball, 2008), and remove the artificial edges
generated from the user-defined hole mask. We then
perform a stochastic sampling of the edges taking the
gray values of the edge image as probability. This
generates a point set representation of the edges. Fi-
nally, we compute the normal and the local curvature
at each point of the point set.
3.3 Analysis: Symmetry Detection
We are interested in approximate and partial symme-
tries, since the image has incomplete information in
the hidden regions and since the image content may
present several inexact symmetries. Therefore, our
approach is largely based on the method proposed by
(Mitra et al., 2006). However, in this paper, we will
restrict the space of symmetries to axial symmetries.
Using the point set representation described above,
valid partial symmetries should map a substantial sub-
set of the points to another one. In its basic form, the
symmetry detector stores for each pair of points their
bisector as a candidate symmetry axis (see Figure 3).
Then it returns the clusters of candidates with their
associated matching regions. The clustering allows
detecting approximate symmetries.
To improve robustness and efficiency of this ba-
sic scheme, we have enhanced this basic scheme as
follows. On the one hand, we can observe that the
sampling of the edges does not guarantee that a point
p of the set is the exact symmetric of another sample
point q. However, their normals should be mapped
even with random sampling. Therefore, we define for
each pair pq the candidate reflection axis T
pq
as the
line passing through the midpoint of pq and parallel
to the bisector of the normals at p and q (see Figure
3). The normals are then symmetric by T
pq
, although
the points p, q may not be. On the other hand, reduc-
ing the number of candidate axes would accelerate the
clustering. Notice that pairing points outputs O(N
2
)
axes. Therefore, we only accept a pair p,q if their
curvatures are similar (0.5 < |K
1
/K
2
| < 2), since the
curvature is covariant with reflections. We also reject
a candidate axis T
pq
defined above if points p and the
reflection of q are farther than 3.5% of the image’s
diagonal.
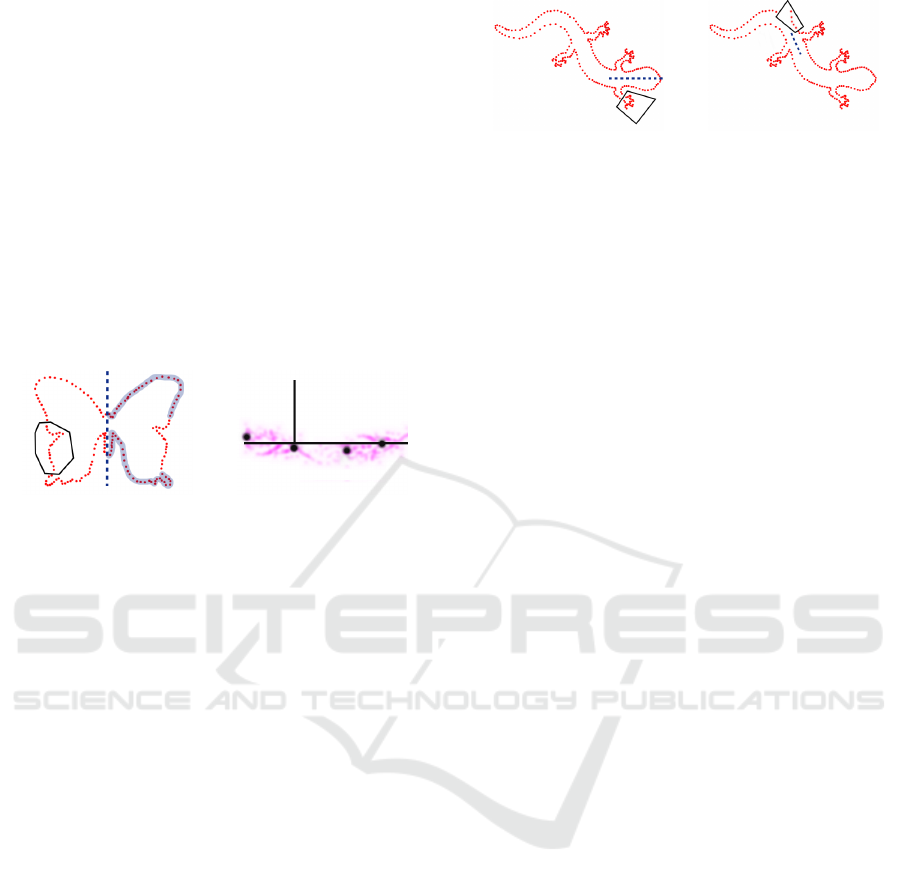
Figure 3: Symmetry axis robustly defined from normals.
SYMMETRY-BASED COMPLETION
41
The filtered candidate axes are then represented by
their distance to the origin and their angle φ ∈ [0, π[
with respect to the horizontal line (see Figure 4).
Clustering is performed in this two-dimensional pa-
rameter space using Mean-Shift Clustering (Comani-
ciu and Meer, 2002), taking into account the inver-
sion at φ = π. Given a candidate axis T
pq
at the cen-
ter of a cluster, we define its matching region to be
the set of point pairs invariant by reflection through
T
pq
. We compute it by propagating from the initial set
S = {p,q}: a neighbor r of a point s ∈ S is added
if its reflection through T
pq
is either close to some
point of the object boundary or inside the hole mask.
This last condition allows detecting incomplete sym-
metries, which are crucial for completion.
(a) Symmetry axis. (b) Axis density.
Figure 4: Clustering of candidate symmetry axis.
3.4 Synthesis: Texture Generation
The completion process first identifies from the ob-
ject structure which of the detected symmetries to use,
and then reflects the image’s texture from visible re-
gions into the occluded one. The ideal situation for
our structural completion occurs when a single sym-
metry’s matching region traverses the hole. In that
case, the sampled points around the hole clearly de-
fine which visible region of the image is to be re-
flected. More precisely, the filled boundary must fit
the known object boundary. In Figure 5(b) there was
a discontinuity. We thus choose among all detected
symmetries the one that best fits the created points
with the known boundary.
However, in many real cases, in particular those
with large missing parts, no mapping with a sin-
gle symmetry axis would create a continuous object
boundary (see Figure 5). To overcome this issue, we
complete the boundary from the hole border inwards.
To do so, we look for the symmetry that maps the
most points while enforcing continuity in the neigh-
borhood of the hole border (see Figure 9). This pro-
cess repeats itself until either we arrive at a closed
boundary or no symmetry axis satisfies the continuity
requirement.
Once the axes have been defined and the valid
structures have been mapped to the hole, we proceed
to the image-based completion. For each pixel i of
(a) Successful. (b) Failed.
Figure 5: A single axis achieves continuity on both sides of
the hole.
the hole, we look for the closest point p of the filled
boundary. This point p has been reflected by a sym-
metry T which is used to find the symmetric pixel j of
i. The color of j is simply copied into i. This approach
is very simple and may be enhanced in future works
by more advanced texture synthesis and insertion.
4 RESULTS
In this section we first detail the implementation, fol-
lowed by a description and analysis of the experi-
ments.
4.1 Implementation Details
The method described at the previous section can
be implemented with different algorithmic optimiza-
tions. During many steps of our algorithm, proximity
queries were required. Therefore, we build a Delau-
nay triangulation at pre-processing in order to sup-
port k-nearest-neighbors queries. Among other al-
ready mentioned uses, these queries serve the normal
and curvature approximations by a local second de-
gree polynomial Monge form. In order to choose effi-
ciently the best axis that maps a valid structure to the
hole’s edge, we build a proximity graph. The vertices
of this graph are the valid structure points that are mir-
rored into the hole. A link between vertices is created
when they have a common symmetry axis T and when
their reflection by T are close-by. The longest path in
that graph determines the best symmetry axis T .
4.2 Experiments
We experimented our technique in different contexts
using images from public domains. Table 1 presents
the execution times including the entire pipeline. The
symmetry detection step accounts for 85% of total
time. The butterfly image of Figure 7 has symmetric
structures and background with the same axis. The
eagle image of Figure 6 has symmetric structures for
the main shape, but the background has a different
symmetry. On the contrary, the turtle image of Figure
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
42

8 has a symmetric background but the animal’s sym-
metry is artificial, although very coherent with the im-
age. The lizard structure of Figure 5 was tested in two
opposite configuration: perfect symmetric and lack of
symmetry. Our method runs in quadratic time, but is
very sensitive to the pruning step.
Table 1: Timings (seconds) on a 2.8 GHz Pentium D.
Model #Points #Symmetries Timing
Butterfly 506 12 44
Eagle 765 9 83
Turtle 575 8 46
Lizard hand 271 10 87
Lizard body 294 10 122
4.3 Discussion
We achieve good results even by considering only ax-
ial symmetries and simply copying the image texture
in the unknown region. When the symmetry struc-
tures traverses the holes, the completion of the fore-
ground is neat (see Figure 7 and 8). The quality ob-
tained in Figure 7(d) is a consequence of symmetry
being present in the background also. Only in a de-
tailed inspection, seams can be detected between the
visible and the reconstructed region. These seams can
only be noted in the texture, not in the background.
Our method completes images based on symme-
tries from the image’s edges, and supposes that the
object’s texture is likely to follow the same transfor-
mation. However, this may not be the case. For exam-
ple in Figure 6, the missing wing of the eagle was well
reconstructed from the visible one, although the syn-
thesized background differs in the tone of blue from
the original one. Blending would solve this case.
Our method only works with images where sym-
metry is present. As most objects have symmetries,
this is not a big restriction. In fact coherent results
were found only when one symmetry axis dominated
the hole. The completed objects above are all seen
from well behaved view points. An object can be
symmetric from a point of view while not being from
others. One simple extension is to ask the user to
mark four points defining the plane where the sym-
metry holds. We would then work on a transformed
space where the symmetry axis is contained in the im-
age plane. One advantage of the method is that the
user knows before hand if it will work since he can
usually see the symmetries himself.
5 CONCLUSIONS
In this work, we propose to incorporate global struc-
tural information of an image into inpainting tech-
niques. In particular, we present a method for inpaint-
ing images that deals with large unknown regions by
using symmetries of the picture to complete it. This
scheme is fully automated requiring from user only
the specification of the hole. The current technique
restricts itself to the analysis of axial symmetries of
the image’s edges, focusing on structure rather than
texture. On the one hand, the transformation space
can be easily extended using the same framework, in-
corporating translations, rotations and eventually pro-
jective transformations at the cost of using a higher
dimensional space of transformations. On the other
hand, texture descriptors could be used to improve
both the symmetry detection and the image synthesis
(see Figure 10). Moreover, the insertion of the synthe-
sized parts into the image can be improved by exist-
ing inpainting techniques. Another line of work, fol-
lowing (Hays and Efros, 2007), is to build a database
of object boundaries. Completion would proceed by
matching the visible part of the object with those in
the database.
REFERENCES
Bertalmio, M., Sapiro, G., Caselles, V., and Ballester, C.
(2000). Image inpainting. In SIGGRAPH. ACM.
Comaniciu, D. and Meer, P. (2002). Mean shift: a robust
approach toward feature space analysis. PAMI.
Criminisi, A., P
´
erez, P., and Toyama, K. (2003). Object
removal by examplar-based inpainting. In CVPR.
Drori, I., Cohen-Or, D., and Yeshurun, H. (2003).
Fragment-based image completion. TOG.
Efros, A. A. and Freeman, W. T. (2001). Image quilting for
texture synthesis and transfer. In SIGGRAPH. ACM.
Gal, R. and Cohen-Or, D. (2006). Salient geometric features
for partial shape matching and similarity. TOG.
Hays, J. and Efros, A. (2007). Scene completion using mil-
lions of photographs. In SIGGRAPH, page 4. ACM.
Kazhdan, M., Funkhouser, T., and Rusinkiewicz, S. (2004).
Symmetry descriptors and 3d shape matching. In
SGP. ACM/Eurographics.
Loy, G. and Eklundh, J.-O. (2006). Detecting symmetry
and symmetric constellations of features. In European
Conference on Computer Vision, pages 508–521.
Mattis, P. and Kimball, S. (2008). Gimp, the GNU Image
Manipulation Program.
Mitra, N., Guibas, L., and Pauly, M. (2006). Partial and ap-
proximate symmetry detection for 3d geometry. TOG.
Mitra, N., Guibas, L., and Pauly, M. (2007). Symmetriza-
tion. TOG, 26(3):63.
SYMMETRY-BASED COMPLETION
43

Perona, P. and Malik, J. (1990). Scale-space and edge de-
tection using anisotropic diffusion. PAMI.
Petronetto, F. (2004). Retoque digital. Master’s thesis,
IMPA. oriented by Luiz-Henrique de Figueiredo.
Sun, C. (1995). Symmetry detection using gradient infor-
mation. Pattern Recognition Letters, 16(9):987–996.
Sun, C. and Sherrah, J. (1997). 3d symmetry detection using
the extended gaussian image. PAMI, 19(2):164–168.
Thrun, S. and Wegbreit, B. (2005). Shape from symmetry.
In ICCV, pages 1824–1831. IEEE.
Wolter, J., Woo, T., and Volz, R. (1985). Optimal algorithms
for symmetry detection in two and three dimensions.
The visual computer, 1(1):37–48.
Zabrodsky, H., Peleg, S., and Avnir, D. (1993). Completion
of occluded shapes using symmetry. In CVPR. IEEE.
Zabrodsky, H., Peleg, S., and Avnir, D. (1995). Symmetry
as a continuous feature. PAMI, 17(12):1154–1166.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
44
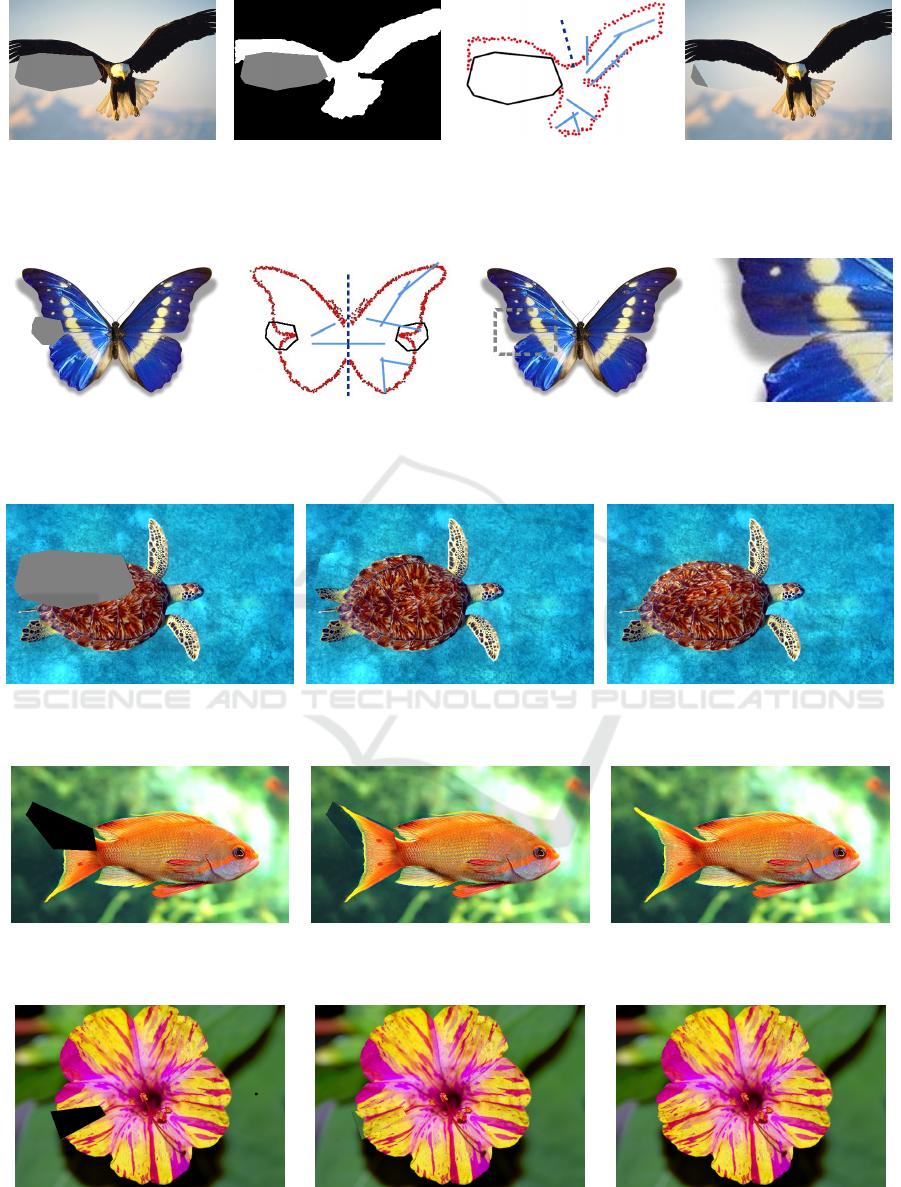
(a) Input image (b) Input image (c) Point cloud and Symme-
tries
(d) Completed image
Figure 6: Eagle example: although the foreground is well completed, the background texture needs further or separate pro-
cessing.
(a) Hole. (b) Axis. (c) Completed image. (d) Completion detail.
Figure 7: Completion of a butterfly image: the marked missing region 7(a), in gray, is identified in the global structure of the
image through axial symmetries 7(b). It can be completed with texture from its symmetric part 7(c),7(d).
(a) Input image (b) Completed image (c) Ground truth
Figure 8: Turtle example: although the completion differs from the original model, it is very coherent.
(a) Input image (b) Half completed image (c) Ground truth
Figure 9: Fish example: a single axis may not ensure boundary coherency on both sides.
(a) Input image (b) Completed image (c) Ground truth
Figure 10: Flower example: texture elements are not yet considered in the analysis.
SYMMETRY-BASED COMPLETION
45
