
IEETA BRAIN COMPUTER INTERFACE
Towards a Rapid Prototyping and Multi-Application System
Virgílio F. Bento, Filipe M. Silva
*
and João P. Silva Cunha
*
Institute of Electronic Engineering and Telematics of Aveiro (IEETA), University of Aveiro, 3810-193 Aveiro, Portugal
*
Dep. Electronics, Telecommunications and Informatics (DETI), University of Aveiro, 3810-193 Aveiro, Portugal
Keywords: Brain-machine interfaces, Electroencephalography (EEG), Mu rhythms, Motor imagery.
Abstract: Recent advances in computer hardware and signal processing assert that controlling certain functions by
thoughts may represent a landmark in the way we interact with many output devices. This paper exploits the
possibility of achieving a communication channel between the brain and a mobile robot through the
modulation of the electroencephalogram (EEG) signal during motor imagery tasks. A major concern was
directed towards designing a generalized and multi-purpose framework that supports rapid prototyping of
various experimental strategies and operating modes. Preliminary results of brain-state estimation using
EEG signals recorded during a self-paced left/right hand movement task are also presented. The user
successfully learned to operate the system and how to better perform the motor-related tasks based on
outcomes produced by its mental focus.
1 INTRODUCTION
In recent years, the appealing idea of a direct
interface between the human brain and an artificial
system – called Brain Computer Interface (BCI) –
has motivated a growing community of researchers
(McFarland, 2006). The conceptual approach is to
model the brain activity variations and map them
into some kind of actuation or command over a
target output (e.g., a computer interface or a robotic
system). Continuing advances in a number of fields
have supported the thesis that the concept is viable,
although a significant research and development
effort has to be conducted before these technologies
enter routine use. Nowadays, the principal reason for
the BCI research is the potential benefits to those
with severe motor disabilities (e.g., amyotrophic
lateral sclerosis, brainstem stroke or severe cerebral
palsy) (Kubler et al., 2005).
The combination of these reasons led the authors
to gradually start a project aiming to initiate a long-
term multidisciplinary research by combining
developments in relevant fields, such as cognitive
neuroscience, brain imaging, pattern recognition,
electronics and computing. The ultimate goal is to
promote the involvement of under and post-graduate
students in international level stages such as
competitions of the grade of BCI2000 (Schalk et al.,
2004) and similar. In the middle-term, the main
scope has been the design and development of a BCI
system to exploit the benefits of a closer interplay
between neurosciences and robotics. A hypothesis is
that brain-actuated control of a robotic device will
improve human-robot interfaces and facilitates robot
programming.
Bearing this in mind, this paper presents the first
steps towards the development of an EEG-based
BCI system that analyzes the brain activity of a
subject, tries to find out its intentions and generates
output commands controlling an appropriate output
device. The relevant feature of this implementation
includes the movement imagery, based on the mu
rhythms, as control strategy to command a Khepera
mobile robot (Pineda et al., 2000). A major concern
was directed towards designing a generalized
framework that supports rapid prototyping of
various experimental strategies and operating
modes. From the current stage of development,
based on Matlab and Simulink, it stands out the high
versatility of implementation that allows the
comparison of different spatial filters, spectral
analysis algorithms and signal processing methods.
Although some issues are yet to be addressed, our
BCI is already mature for practical experiments and
to obtain the first conclusions on the potential of the
proposed solutions.
337
F. Bento V., M. Silva F. and P. Silva Cunha J. (2009).
IEETA BRAIN COMPUTER INTERFACE - Towards a Rapid Prototyping and Multi-Application System .
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 337-344
DOI: 10.5220/0001550003370344
Copyright
c
SciTePress

The remainder of the paper is organised as
follows. Section 2 reports previous studies that
produced valuable insights, focusing on strategies
employed and the potential of mu rhythms in actual
BCIs. Section 3 describes the design options, the
developed tools and the applications of the IEETA
BCI. Section 4 presents preliminary results of brain-
state estimation using EEG signals recorded during a
self-paced left/right hand movement tasks, while
controlling the Khepera mobile robot. Section 5
concludes the paper and outlines the perspectives of
future research.
2 RELATED WORK
Over the past decade, several working BCI systems
have been described in the literature (Jos et al.,
2004, Pfurtscheller et al., 2006, Wolpaw et al.,
2003). These systems use a variety of signal
acquisition methods, experimental paradigms,
pattern recognition approaches and output interfaces,
requiring different types of cognitive activity. Most
solutions rely on brain electrical activity measured
through electroencephalogram (EEG). Despite their
poor spatial resolution, this non-invasive technique
has proven to be a useful and practical tool in
experimental research, mainly due to fast recording,
easy subject preparation and reduced equipment
required. Furthermore, the relationship between
EEGs and brain function is well documented in the
literature.
One type of BCI that has been extensively
studied derives information either from the user’s
movements or the imagination of movement. These
movement-based BCIs recognize changes in the
human mu rhythm, which is an EEG oscillation
recorded in the 8-13 Hz range from the central
region of the scalp overlying the sensoriomotor
cortex (Kuhlman, 1978, Pfurtscheller and Lopes da
Silva, 1999). This activity is most pronounced when
subjects are at rest, but not planning to initiate
voluntary movement. At least a second before
subjects initiate voluntary movement, the mu rhythm
over the hemisphere contralateral to the region
moved shows a decrease in amplitude and thus
power. This attenuation becomes more symmetric
over both hemispheres as subjects actually initiate
the movement and remains until shortly after the
movement is initiated. Mu activity returns to
baseline levels within a second after movement is
initiated and may briefly increase above baseline
(Fatourechi et al., 2007, Pineda et al., 2000). These
activity dependent changes in mu activity have also
been called Event Related Desynchronization (ERD)
and Event Related Synchronization (ERS) by
Pfurtscheller and his co-workers (Pfurtscheller and
Lopes da Silva, 1999).
The mu rhythm thus has potential for BCIs for
many reasons. It is present in nearly all adults,
including many individuals with motor disabilities.
Since it’s easy to train in subjects while they are
awake with eyes open (Kuhlman, 1978, Pfurtscheller
and Lopes da Silva, 1999) and can be affected by
visual and imagined input (Muthukumaraswamy et
al., 2004, Pineda, 2005, Hoshi and Tanji, 2006), it
may be possible for users to learn to use a mu
rhythm based BCI system by means of a multiplicity
of stimuli and cognitive strategies. Therefore, the
pattern recognition may be simple: detecting power
changes can be fruitful in BCI design. Finally, the
mu rhythm can be modulated in either or both
hemispheres (Pfurtscheller and Lopes da Silva,
1999, Pineda et al., 2000).
These observations led us to utilise motor
imagery as control strategy to achieve asymmetrical
electrocortical responses and to use left-right
differences in the sensoriomotor EEG to provide the
required control options of a two dimensional
environment.
3 IEETA BCI: DESIGN AND
OPERATION
The IEETA BCI system was conceived having in
mind the application to which it will be applied:
control of a robotic device. Moreover, the BCI tools
are optimized for each individual user by providing
him with a training period in the presence of
feedback. Indeed, present BCI systems depend on
user control of brain electric activity, such as
amplitude in a specific frequency band (e.g., mu
rhythms) in EEG recorded over a specific cortical
area (e.g., sensoriomotor cortex).
This section describes the relevant development
steps since they will reveal much about the
problems, challenges and tradeoffs of the complete
BCI prototype, as well as guide the selection of
alternative designs.
Matlab
®
and Simulink
®
were the platform chosen to
develop the BCI system. This choice is justified by
the fact that it’s the widely tool used in signal
processing and classification. These two areas
represent the main base of any BCI system.
Due to the flexibility of Matlab programming, all
the algorithms are written in Matlab code whereas
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
338

the driver of the acquisition hardware was created
employing C++, using a wrapper to integrate it.
Another important aspect of developing any
system in Matlab
®
is that, this can be done in a high
abstraction level, letting the developer focus on the
problems of the system and not on the tools that
support it. Each new module can be chosen from
Simulink library. Simulink library provides many
Signal Processing modules for direct
implementation. When a new module is needed with
a specific task, it can be implemented using an S-
Function.
S-Functions uses a callback method to perform
each task that operate flawlessly within the main
system, this way we guarantee a temporal
performance, essential in online analysis.
3.1 EEG Recording
EEG signals were recorded from eight scalp
electrodes placed over central (C3, C4), frontal (F3,
F4) and parietal (P7, P8, P3 and P4) locations
according to the 10-20 international system and
referred to a linked-ear reference (Jasper, 1952).
Using this spatial location we assume that a generic
motor imagery task can relate to different subsets of
cortical areas activation, resulting in the excitability
of different regions such as the Premotor Cortex, the
supplementary motor area, the primary motor cortex
and the sensoriomotor cortex (Porro et al., 1996,
Lacourse et al., 2005, Lotze et al., 1999).
Figure 1: Spatial Location of the EEG electrodes over the
frontal, central and parietal areas.
The BCI user utilizes a portable EEG acquisition
system (Figure 2) with a sampling rate of 256 Hz.
This EEG system imposes a maximum number of 8
acquisition electrodes. This difficulty becomes
secondary by the advantage of using a portable
system that represents minor power consumption,
essential to the implementation of a future
ambulatory system. Another advantage resulting
from using a small number of electrodes is the
smooth online performance of the BCI system, as
trivial to assume that a higher number of EEG
electrodes results in a higher number of signals to
process that if not equipped with fast, and expensive,
hardware system could inflict slowdowns in the real-
time processing.
Figure 2: TrackIt system: ambulatory acquisition of EEG
signals (from LifeLines Ltd).
3.2 Control Paradigm
According to (Arroyo et al., 1993) mu waves are
almost constantly present when the subject is relaxed
and are heavily suppressed when the subject
performs a motor (imagery or real) task exciting the
contralateral side, i.e. mu waves disappear over the
left brain hemisphere when the right hand is moved
and vice versa. In addition, humans can learn to
modify the amplitude of the mu rhythm after
prolonged training (on the order of weeks or
months) with the help of mental activities alone.
This is the starting point of the systems described in
(Fabiani et al., 2004, Guger et al., 2001, Wolpaw et
al., 2000). Their idea is to take that amplitude –
measured only by one pair of electrodes – and
translate it into (one-dimensional) cursor movement.
Using a simple computation, it estimates the FFT of
the ongoing EEG (“online”), taking the square root
of the power associated with the mu rhythm
frequency range, and comparing the resulting value
with adaptable voltage ranges. This leads to a trivial
quantification (or classification) encoding the mu
rhythm amplitude, and is directly translated into the
movement of a cursor on a feedback video screen,
where low amplitudes move the cursor down, while
high amplitudes move it up (the magnitude of the
upward or downward movement being part of the
quantification, too).
Although the accuracy that can be achieved with
this system is relatively high (in up to 95% of all
cases, the system really does what the user wants it
to do), it cannot serve as the basis for a practical
IEETA BRAIN COMPUTER INTERFACE - Towards a Rapid Prototyping and Multi-Application System
339
device, since it is very slow. To cope with this
problem, the solution relies in the multi-dimensional
control provided by distinct EEG features. The idea
was to record the EEG at two different sites on the
scalp, hoping that subjects would be able to learn to
intentionally vary the two mu rhythm amplitudes
simultaneously and independently. The projected
system was much more practicable, since it
possessed the potential to “emulate” a computer
mouse to a certain extent. However, despite the
correctness of the “independence hypothesis”, the
outcome was not much more than a laboratory
phenomenon, because the achieved accuracy did not
exceed 70%. Kostov and Polak, (2000) have also
shown that
subjects can move a virtual object up and
down on a computer screen by issuing various
mental activities during a time window delimited by
the pressing of two manual switches.
3.3 Signal Processing and Classifier
Each EEG raw signal was filtered in the 8-13 Hz
band by a 20-order Band-Pass Butterworth Filter.
After filtering, the signal was segmented in
customized blocks of 128 samples (0.5s). Each
signal block was transformed by a surface Laplacian
in F3, C3, P3 and P7 for the left Hemisphere and F4,
C4, P4 and P8 for the Right Hemisphere (see Figure
1).
The power spectrum Estimation was performed
using the Yule-Walker Method (Kay, 1998). Each
vector (8 channels with 128 frequency components)
is then analysed by the ERD (Event Related
Desynchronization) block, which verify for a
specific frequency band if the ERD is confirmed.
There are two ERD modules, one for each
hemispheric signal.
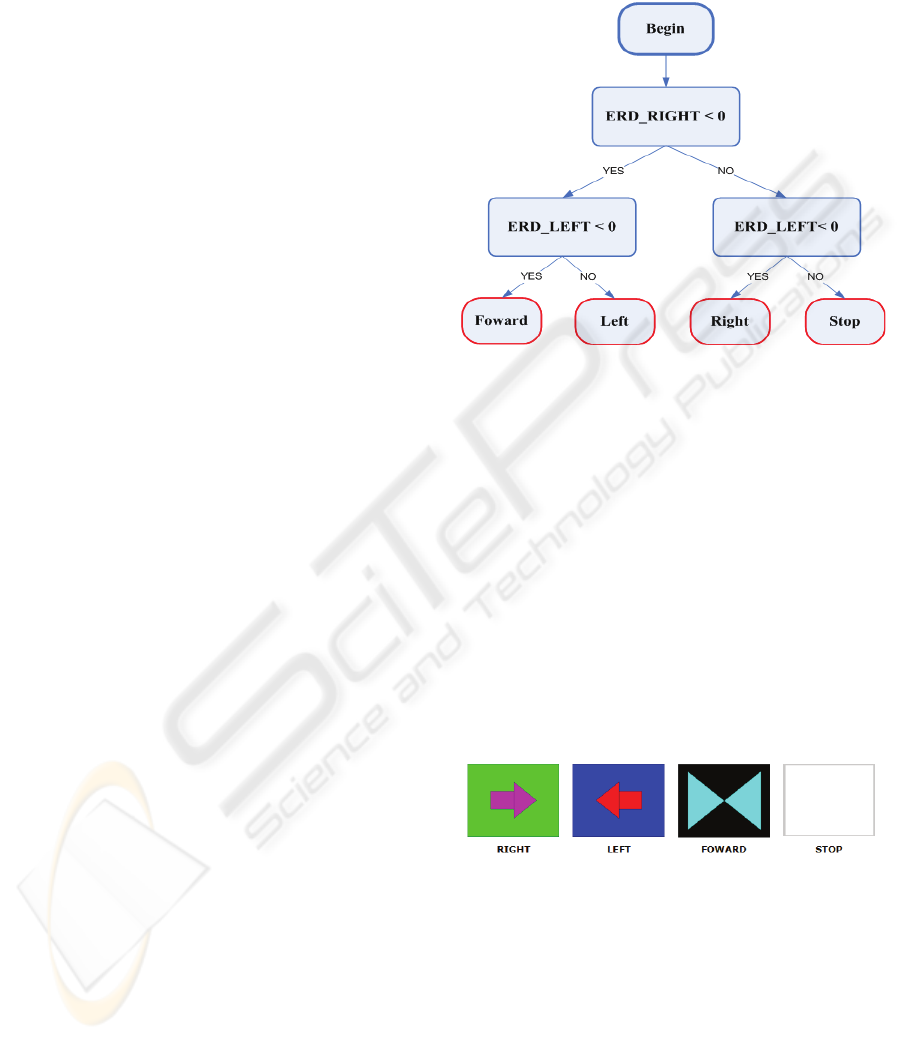
The Classifier (
Figure 3
) has two inputs, one for
each ERD block. It was implemented by mean of a
decision tree, so if only the Right Hemisphere signal
verifies the ERD, the classifier output is “LEFT”. If
only the Left Hemisphere signal verifies the ERD,
then the classifier output is “RIGHT”. If both the
signals verify the ERD then the output is
“FORWARD”. If neither one of the signals verifies
the ERD, then the output is “STOP”. In this way,
with only 2 mental tasks, we obtain 4 possible
control orders.
The majority of the BCI systems implemented
devote a great part of the system resources and
development time in the classifier. Nonetheless, a
very important part of any BCI system, the authors
of this BCI system realize that the importance of the
classifier can easily be minored if we get better and
enhanced features from the mental tasks carried out.
This can be achieved selecting the best electrodes
set-up, signal processing methods and new EEG
processing techniques such as ERD, ERS, P300 and
others yet to be found.
Figure 3: Binary Tree Classifier perceiving four possible
states based on the two ERD features.
3.4 BCI Output
The mobile robot used as the control application was
a small Khepera. The Khepera robot (5.7 cm
diameter), is a two-wheeled vehicle with 8 infrared
sensors representing the ideal analogy for a
wheelchair.
Two other graphical applications where
developed, BioFeedback I and BioFeedback II, both
mainly used in user training.
BioFeedback I provides the feedback in a
graphical way, displaying one of four images
according to the classifier output - “RIGHT”,
”LEFT”, ”FORWARD”, ”STOP”.
Figure 4: Training Module where each image correlates
with a classification output (BioFeedback I).
Feedback is provided by means of coloured
arrows, one for each mental task, for easily
recognition of the system output.
The other graphical application (BioFeedback II)
is also used in the online test of the system, and it’s a
classical application of the BCI systems. The goal of
this application is to place the cursor on one of three
possible areas (Figure 5). The cursor is controlled by
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
340

means of the classifier outputs – “RIGTH”, “LEFT”
and “FORWARD”.
Figure 5: Second Graphical Application proposed for user
training (Biofeedback II).
The final application is the control application
depicted before. This output module, depending on
what the classifier output is, controls the velocity on
each wheel. The Khepera robot provides 8 infrared
sensors, this enables, in integration with the system,
to detect when the robot reaches a wall, allowing in
this case only two possible movements – forward
and the opposite wall direction movement.
The control communication with the Khepera
Robot is performed through RS232 protocol and
using the communication toolbox available from
Matlab
®
in real-time performance.
Figure 6: Control output.
4 EXPERIMENTAL RESULTS
4.1 Users’ Protocol
During a session, the subject sat in front of a screen,
and was asked to remain still (Figure 7a). Scalp
electrodes (see montage in Figure 1) acquired 8 EEG
channels, each one of them referenced to an
electrode in the right ear lobe.
The Experimental Procedure was designed in 3
steps. First we acquire the Baselines through the
BCI_GetBase sub-system that is essentially the BCI
system without the output module, sharing all the
main modules and its configuration.
The Baseline is the core of any ERD based
system. We acquire 3 Baselines, for 3 mental tasks:
imagery finger tapping; imagery open/close hand;
imagery free hand movement. We choose three
different baselines, due to the fact that the definition
of baseline is related with the definition of No
Control (NC) state, that is when there is no
intentional control, e.g., during periods of thinking
or monitoring that do not correspond to the cortical
excitation achieved by the two motor imagery tasks
that are asked to the user. NC control support is
necessary for most types of machine or device
interactions where frequent actions are spaced by
periods of inaction. In this way, and using the
contralateral propriety of cortical activation, the
baseline that shares all the common underlying brain
activity of the motor imagery tasks asked to the user,
is its opposite task, e.g., if we are analysing the
presence of a right motor imagery task we compare
the EEG signal with the recorded baseline for the
left motor imagery task performed before, detecting
in this way all the difference in signal amplitudes
related to the modulation of the mu rhythms.
After the record of the baselines the subject was
given three possible conditions to control the
Khepera robot.
1) Rest: the subject, sat in a comfortable chair,
was asked to relax as much as possible and think of
nothing in particular.
2) Self-generated movements: subject is asked
to move each finger;
(3) Imagination: subjects were instructed to
image performing the self-generated movement
without actually doing it.
Only the results achieved using the motor
imagery tasks were explored in validating the
preliminary system results.
4.2 Data Analysis
The degree of mu suppression occurring during the
imagery of movement can be expressed as a relation
with the peak power value at rest and typically
shows an average decrease that depends on the level
and “quality” of attention.
After we got all the 3 Baselines for each
ipsilateral hemisphere (Figure 8 and 9), the system
automatically chooses what is the Baseline that
offers the best results. The notion of a good Baseline
IEETA BRAIN COMPUTER INTERFACE - Towards a Rapid Prototyping and Multi-Application System
341

Figure 7: Experimental Environment.
is associated with the absence of involuntary
desynchronization or artefacts.
With the baselines for each mental task, the next
step is to train the user in the system. To promote a
fast learning on how to better control the cerebral
rhythms it’s proposed to the user the BioFeedback I
and II usage for a typical period of 30 minutes that
can be (desirably) increased depending on the user
available time
Figure 8: Baselines for: imagery finger tapping, imagery
close/open Hand and imagery free hand movement
respectively (Ipsilateral Movement - Right Hand, Right
Hemisphere).
Finally, after the acquisition of the Baseline and
the (ideal) extensive training of the user, we analyse
the user performance in controlling the Khepera
Robot. In this step, all the BCI system configuration
is set up specifically for the user, this is easily
achieved due to the rapid-prototyping characteristic
we included in the system.
These distinctive features of any BCI system
relate to the importance of the user training that after
a few hours of train could certainly boost the system
performance.
The control of the Khepera robot was done in a
free environment. The user had to move it to two
possible areas as shown on Figure 7b using the
motor imagery tasks depicted before.
Figure 9: Baselines for: imagery finger tapping, imagery
close/open Hand and imagery free hand movement
respectively (Ipsilateral Movement - Left Hand, Left
Hemisphere).
Examples of the ERD achieved for both the
“Right” and “Left” areas in the contralateral spatial
filtered electrodes (C3 and C4) are shown below.
Figure 10: ERD for the spatial filtered signal at C3 (Right
Area target).
Figure 11: ERD for the spatial filtered signal at C4 (Left
Area target).
The user achieved a 70% correct classification
rate for each direction in a total of 7 trials. The
AB
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
342

classification rate has evolved during the sequential
trials. Through time, the user developed own ways
to better control the robot. This fact implies that an
extensive training is essential to obtain very good
results.
Nonetheless the lack of extent of the online
results, as referred earlier, these results are
preliminary and mainly used to validate the system
as a promising BCI structure.
5 CONCLUSIONS
We have shown the development of a multi-
application BCI system from the source to the
output. Using rapid-prototyping tools we ensured an
efficient time-progress window of development.
This also represents a proficient ability to perform
several optimizations quickly and in highly
integration with the structural hierarchy of the BCI
system implemented.
An important aspect about this BCI system is its
modular structure that allows it to perform a
different function just by creating a new output
module. This modular structure also improves the
time-progress window due to its parallel
development and optimization suited for each
module individually.
This system represents a new BCI platform
developed using efficient and widely used signal
processing tools ensuring in this way a maximum
focus on the project itself and not on the
development tools that support it.
In spite of being in an inborn stage this system
provided encouraging results in the preliminary
online test made. The user demonstrated satisfaction
in using the system and confirmed its controllability.
More and extended online tests are needed to
perform increasable optimizations, nonetheless, this
process is already on course in two different BCI
areas (Control and Bio-Encryption), that due to the
system modularity interchange results and possible
optimization between them in order to achieve the
best possible results.
ACKNOWLEDGEMENTS
The authors would like to thank Luis Paula for the
voluntary testing of the system and its valorous
commentaries.
Partly supported by "EpilBI - Epileptogenic
focus localization in a 3D multimodal Brain Imaging
system." (POSC/EEA-CPS/60977/2004 – FCT)
project.
REFERENCES
Arroyo, S., Lesser, R. P., Gordon, B., Uematsu, S.,
Jackson, D. & Webber, R. (1993) Functional
significance of the mu rhythm of human cortex: an
electrophysiologic study with subdural electrodes.
Electroencephalogr Clin Neurophysiol, 87, 76-87.
Fabiani, G. E., Fabiani, G. E., Mcfarland, D. J., Wolpaw,
J. R. & Pfurtscheller, G. A. P. G. (2004) Conversion of
EEG activity into cursor movement by a brain-
computer interface (BCI).Neural Systems and
Rehabilitation Engineering, IEEE Transactions on
[see also IEEE Trans. on Rehabilitation Engineering],
12, 331-338.
Fatourechi, M., Birch, G. E. & Ward, R. K. (2007) A self-
paced brain interface system that uses movement
related potentials and changes in the power of brain
rhythms. J Comput Neurosci, 23, 21-37.
Guger, C., Guger, C., Schlogl, A., Neuper, C.,
Walterspacher, D. A. W. D., Strein, T. A. S. T. &
Pfurtscheller, G. A. P. G. (2001) Rapid prototyping of
an EEG-based brain-computer interface (BCI)Neural
Systems and Rehabilitation Engineering, IEEE
Transactions on [see also IEEE Trans. on
Rehabilitation Engineering], 9, 49-58.
Hoshi, E. & Tanji, J. (2006) Differential involvement of
neurons in the dorsal and ventral premotor cortex
during processing of visual signals for action planning.
J Neurophysiol, 95, 3596-616.
Jasper, H. H. (1952) Electroencephalography. Pediatrics,
9, 786-7.
Jos, Del, R. M., Fr, D, Ric, R., Josep, M. & Wulfram, G.
(2004) Brain-actuated interaction. Elsevier Science
Publishers Ltd.
Kay, S. M. (1998) Modern Spectral Estimation: Theory
and Application., Englewood Cliffs, Prentice-Hall.
Kostov, A. & Polak, M. (2000) Parallel man-machine
training in development of EEG-based cursor control.
IEEE Trans Rehabil Eng, 8, 203-5.
Kubler, A., Nijboer, F., Mellinger, J., Vaughan, T. M.,
Pawelzik, H., Schalk, G., Mcfarland, D. J., Birbaumer,
N. & Wolpaw, J. R. (2005) Patients with ALS can use
sensorimotor rhythms to operate a brain-computer
interface.
Kuhlman, W. N. (1978) Functional topography of the
human mu rhythm. Electroencephalogr Clin
Neurophysiol, 44, 83-93.
Lacourse, M. G., Orr, E. L., Cramer, S. C. & Cohen, M. J.
(2005) Brain activation during execution and motor
imagery of novel and skilled sequential hand
movements. Neuroimage, 27, 505-19.
Lotze, M., Montoya, P., Erb, M., Hulsmann, E., Flor, H.,
Klose, U., Birbaumer, N. & Grodd, W. (1999)
Activation of cortical and cerebellar motor areas
IEETA BRAIN COMPUTER INTERFACE - Towards a Rapid Prototyping and Multi-Application System
343

during executed and imagined hand movements: an
fMRI study. J Cogn Neurosci, 11, 491-501.
Mcfarland, D. (2006) BCI Communication Devices.
WTEC Workshop on Brain Computer Interface (BCI)
Research.
Muthukumaraswamy, S. D., Johnson, B. W. & Mcnair, N.
A. (2004) Mu rhythm modulation during observation
of an object-directed grasp. Brain Res Cogn Brain Res,
19, 195-201.
Pfurtscheller, G. & Lopes da Silva, F. H. (1999) Event-
related EEG/MEG synchronization and
desynchronization: basic principles. Clin
Neurophysiol, 110, 1842-57.
Pfurtscheller, G., Pfurtscheller, G., Muller-Putz, G. R.,
Schlogl, A., Graimann, B. A. G. B., Scherer, R. A. S.
R., Leeb, R. A. L. R., Brunner, C. A. B. C., Keinrath,
C. A. K. C., Lee, F. A. L. F., Townsend, G. A. T. G.,
Vidaurre, C. A. V. C. & Neuper, C. A. N. C. (2006) 15
years of BCI research at graz university of technology:
current projects.Neural Systems and Rehabilitation
Engineering, IEEE Transactions on [see also IEEE
Trans. on Rehabilitation Engineering], 14, 205-210.
Pineda, J. A. (2005) The functional significance of mu
rhythms: translating "seeing" and "hearing" into
"doing". Brain Res Brain Res Rev, 50, 57-68.
Pineda, J. A., Allison, B. Z. & Vankov, A. (2000) The
effects of self-movement, observation, and
imagination on mu rhythms and readiness potentials
(RP's): toward a brain-computer interface (BCI). IEEE
Trans Rehabil Eng, 8, 219-22.
Porro, C. A., Francescato, M. P., Cettolo, V., Diamond, M.
E., Baraldi, P., Zuiani, C., Bazzocchi, M. & Di
prampero, P. E. (1996) Primary motor and sensory
cortex activation during motor performance and motor
imagery: a functional magnetic resonance imaging
study. J Neurosci, 16, 7688-98.
Schalk, G., Schalk, G., Mcfarland, D. J., Hinterberger, T.,
Birbaumer, N. A. B. N. & Wolpaw, J. R. A. W. J. R.
(2004) BCI2000: a general-purpose brain-computer
interface (BCI) system
BCI2000: a general-purpose brain-computer interface
(BCI) system. Biomedical Engineering, IEEE
Transactions on, 51, 1034-1043.
Wolpaw, J. R., Wolpaw, J. R., Mcfarland, D. J. &
Vaughan, T. M. (2000) Brain-computer interface
research at the Wadsworth Center.Rehabilitation
Engineering, IEEE Transactions on [see also IEEE
Trans. on Neural Systems and Rehabilitation], 8, 222-
226.
Wolpaw, J. R., Wolpaw, J. R., Mcfarland, D. J., Vaughan,
T. M. & Schalk, G. A. S. G. (2003) The Wadsworth
Center brain-computer interface (BCI) research and
development program.Neural Systems and
Rehabilitation Engineering, IEEE Transactions on
[see also IEEE Trans. on Rehabilitation Engineering],
11, 1-4.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
344
