
A NEW PERFORMATIVE FOR HANDLING LACK
OF ANSWERS OF AUTONOMOUS AGENTS
Katia Potiron
1,2
, Patrick Taillibert
1
and Amal El Fallah Seghrouchni
2
1
Thales Syst
`
emes A
´
eroport
´
es, 2 avenue Gay Lussac, 78852 Elancourt, France
2
Laboratoire Informatique de Paris 6, 104 avenue du Pr
´
esident Kennedy, 75016 Paris, France
Keywords:
Agent communication, Fault tolerance, Agent design, Autonomy, Fault handler.
Abstract:
An agent can send a message and never receive a response, this is what we name the ”empty mailbox prob-
lem” this paper is concerned with. The causes of the problem can lie in low level layer as, for instance, in
communication links, but also in the behavior of the autonomous entity the agent is interacting with, which
can choose not to respond. The task is not easy, for the agents developer, to find what is to do in such cases.
The proposed solution consists in a performative and the associated meta-protocol. This results into a generic
method to handle the empty mailbox problem in the case of temporary faults. Some prospects are given to
handle permanent faults.
1 INTRODUCTION
The Empty Mailbox Problem (EMP), in other words
the problem to find what is to be done when an ex-
pected information is not received, is not specific to
the MAS domain.
In distributed systems the fact that an expected mes-
sage is not received, may result from: a development
fault (a bad implementation of the interaction pro-
tocol), a problem with the communication link (loss
or deterioration of a message), a hardware failure (a
computer crash), a bad specification on the interaction
protocol, a malicious user...
But for MAS, which are composed of autonomous
agents, another cause can be identified. If an au-
tonomous agent chooses, for any reason, not to fol-
low the interaction protocol used during a conversa-
tion with other agent; the other agent waits for a mes-
sage but its mailbox remains empty.
More rigorously, the EMP is an error that pro-
grams communicating by message passing can exper-
iment due to several faults (since faults are defined
as the causes of errors). In order to define the faults
that cause of the EMP, and hence get clues to find an
adapted handler, we first analyze fault classification
results, obtained so far.
1.1 The Faults Leading to the EMP
A conventional fault classification (Avizienis et al.,
2004), in particular suitable for distributed systems
(which MAS are), presents a study of all the faults that
can affect a system, fig.1 presents the resulting fault
classes tree. A study of the faults leading to the EMP
into distributed system reveals that the faults can po-
tentially belong to any of the number 1 to 25 classes.
These include development (a mistake made into the
code of the agent), interaction (a wrong specification
of the interaction protocol) or operational (a network
cable unplugged) level faults.
But because of MAS specificities (in particular au-
tonomy and proactiveness), we showed in (Potiron
et al., 2007) that an extension to the classification was
necessary. We introduced the value autonomy into the
existing classification to represent the faults occur-
ring during the autonomous and proactive behavior
of an agent. We named this class of faults: Behav-
ioral faults.
These faults are the consequence of the impossibil-
ity for agents to predict with certainty the behavior of
other agents as well as a consequence of the need for
an agent to adapt itself to this unpredictability. This
corresponds to six new classes represented in fig.1 by
number 26 to 31 on fig.1. A behavioral fault, on an
agent-centered point of view, is a consequence of the
freedom, ”the power to say no”, that autonomy gives
to other agents making them possibly unpredictable.
This corresponds to six new classes represented by
the fault classes number 32 to 37 on fig.1. Here again
the faults corresponding to the EMP into MAS are
potentially resulting from any of the number 26 to 37
classes.
441
Potiron K., Taillibert P. and El Fallah Seghrouchni A. (2009).
A NEW PERFORMATIVE FOR HANDLING LACK OF ANSWERS OF AUTONOMOUS AGENTS.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 441-446
DOI: 10.5220/0001511704410446
Copyright
c
SciTePress

Figure 1: Fault classes combinations.
This results on the following conclusion: the EMP
is an error potentially resulting from any of the 37
fault classes presented before, which means: for all
the possible faults occurring in MAS. When mes-
sage passing is the only mean of communication for
agents, the EMP is a serious issue and finding an
adapted handler is a difficult task for the developer.
Therefore, making handlers adapted to a specific sit-
uation (for a specific interaction protocol in a specific
system) and for a specific class of faults cannot lead
to an easy handling of the EMP.
This paper will be organized as follow. Section 2
is a view of the related work. Section 3 presents our
proposed handler. Section 4 proposes an overview
of the integration of our solution into the behavior
of agents and experimental results. Section 5 pro-
poses discussions related to the proposed method and
the last section concludes and presents some perspec-
tives.
2 RELATED WORK
Two main line of research in the MAS domain have
similar goals than our work (we exclude here the
ad hoc adaptation of interaction protocols and non
reusable methods), they are presented next.
One line of research for agents fault tolerance is to
include the fault tolerance directly into the languages
representing the behavior of the agent. The creators
of Cool (Barbuceanu and Fox, 1995) or AgenTalk
(Kuwabara, 1996) in their papers introducing their
respective languages also present some prospects on
mechanisms to handle faults into the conversations.
They propose to use a meta script to control the exe-
cution of the behavioral scripts, the meta scripts being
started with messages, representing the exceptions,
sent from the behavioral script to the meta script. The
authors do not provide any general meta script of con-
trol and assume that they will be built in a suitable
way for each exception. They conclude saying that
the meta scripts can maybe be grouped together using
exception classes.
More recently, Dragoni and Gaspari (Dragoni and
Gaspari, 2006) proposed a fault tolerant agent com-
munication language that deals with crash failure of
agent, providing fault tolerant communication primi-
tives and support for an anonymous interaction proto-
col. The knowledge level of the FT-ACL is based on
giving for each speech act a success continuation and
a failure continuation.
These methods are focused on conversational agents
and on the handling of faults perceived into the com-
munications but the realization of the suitable handler
is the responsibility and the burden of the developer.
The more serious issue of such a handler creation is
the risk for the developer to introduce new faults into
its handler. As shown after, our EMP handling propo-
sition can be seen as a general meta script or a general
failure continuation method.
Another line of research in MAS, on exception
handling for MAS (Klein and Dellarocas, 1999) uses
sentinels to diagnose (from the analysis of the re-
ceived and sent messages) and handle exceptions
for agents. This approach is different from the ap-
proaches presented previously since the diagnosis and
decision about the handler adapted to the fault is out-
side the agent. The choice of the handler can be done
inside a knowledge-base containing specific handlers
(Klein and Dellarocas, 2000). Besides the creation of
the external entity, it requires some special conception
of the agents to allow an external entity to change its
internal state. Our EMP handling proposition can be
viewed as a handler that sentinels can choose to man-
age a diagnosed fault.
3 A HANDLER FOR THE EMP
3.1 Looking for a Fault Handler
The first observation, that must be done is that the
proper handling of a fault depends on the fault be-
ing temporary or permanent since methods adapted
to the first case are not relevant to the second and
methods adapted to permanent faults (and then po-
tentially for temporary faults) are too costly or too
drastic. So, persistence is the more discriminating
attribute for the handling of the faults during pro-
gram execution. The work presented in this paper
has been particularly focused on temporary faults but
we study some prospects about the handling of per-
manent faults. Being concerned by temporary faults
is a restrictive working hypothesis but since they are
present when the system is running and they represent
half of the fault classes, it is not too restrictive.
Even if, we consider that it is free to evaluate
whether the fact that the message it expects to receive
has not yet arrived is a ”normal” or ”exceptional” situ-
ICAART 2009 - International Conference on Agents and Artificial Intelligence
442
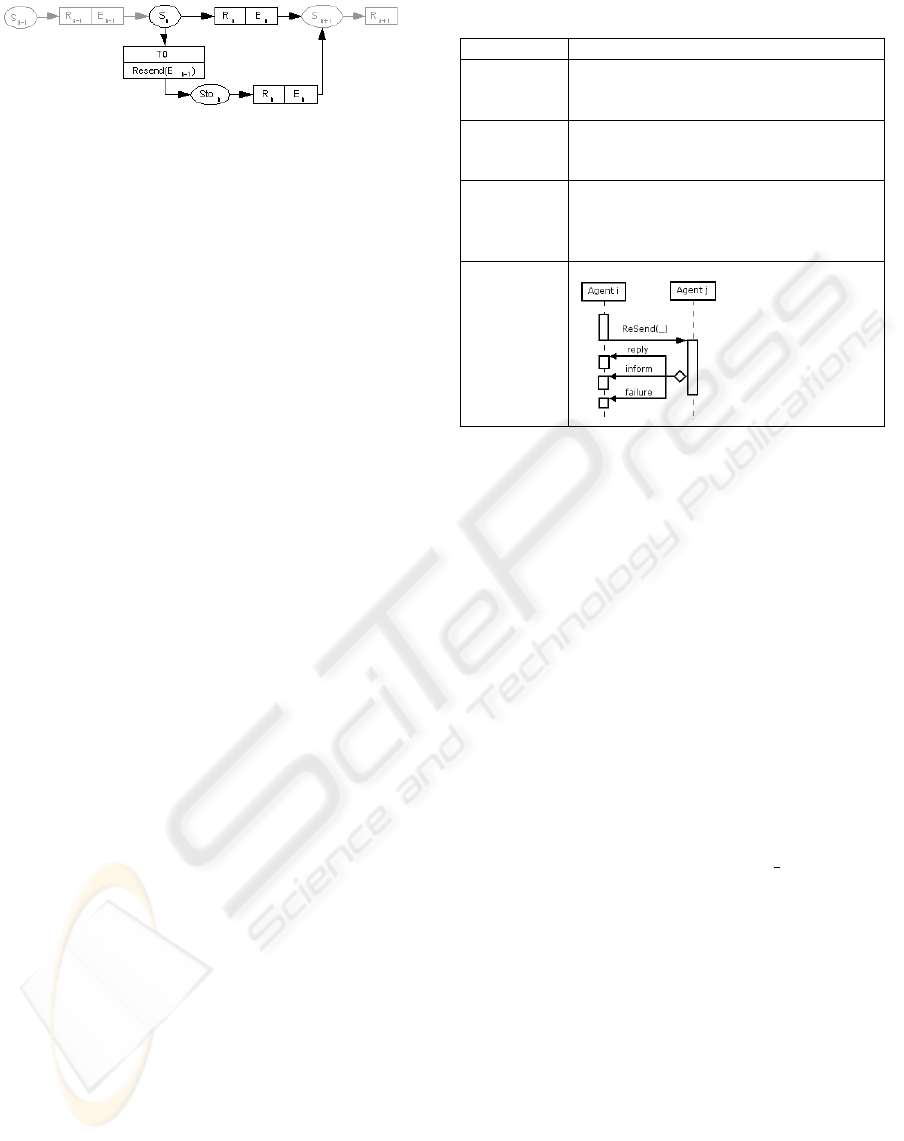
Figure 2: Behavior of an agent using the Resend method.
ation due to some form of autonomy. We assume that,
on each state of an interaction protocol correspond-
ing to the waiting of a specific response or event, the
agent has a fault detection mean (for example a time-
out). This allows detecting a fault before the agent
does any other action into this interaction protocol.
Furthermore, it seems natural that the agent can also
evaluate the usefulness of a fault handler or another.
This results on the following consideration: the agent
must have handlers adapted to its knowledge level and
some knowledge about how to chose and use them.
3.2 Resend: A Handler for the Agents
3.2.1 Key Idea
Resend corresponds to a performative and a protocol,
initially suggested in (Potiron et al., 2007) as an ex-
ample. It was designed for agents to handle some be-
havioral faults based on the argument that a time re-
dundancy method can be used in a cooperative way
and can be adapted to the knowledge level of the
agents.
The key idea can be illustrated as follows:
• When your browser writes ”The server is down,
please try again later” you refresh the page: you
just use the time redundancy method sending the
same request to the server;
• But when you send a mail and have no response
you would rather send a new mail saying ”In a
previous mail, I asked you this question and I am
really bothered that I had no response about it.”
Thus, resend is used when an agent thinks that it
should have received a response (or perceived a result
expected after the sending of a message). It consists
in sending a new message encapsulating the previous
one to explain to the other agent that the expected re-
sponse was not received. The behavior of an agent
using the resend method is depicted on fig.2. When
the agent considers an exception in state2 it sends the
resend message and waits the result in a new state cor-
responding to a deviation of its behavior, state2 bis. If
the expected result is perceived in state2 bis the agent
continues its nominal behavior making the action2.
Table 1: Resend description.
Name Resend
Description An agent i tells an agent j that i desires
that j processes the expression φ because
i had not perceived any realization.
Message The Resend performative contains the
expression φ corresponding to the perfor-
mative of the message.
Formal
h
i, resend( j, φ)
i
≡
h
i, in f orm( j, U
i
φ ∧I
i
φ)
i
model FP : I
i
φ ∧U
i
(B
j
I
i
φ ∨B
j
φ)
RE : B
j
I
i
φ
Protocol
3.2.2 Formal Description
The performative, ”expresses a mental state to the
other agent”, it corresponds to an ”expressive” speech
act as defined in (Searle, 1969). A formal description
of the resend performative, using FIPA-ACL formal
logic (FIPA, 2001), and the associated protocol are
given by tab.1.
The description of the Resend performative for
KQML (Finin et al., 1997), would be: Normally the
receiver of a performative will deliver its response
as soon as a response is generated. The resend per-
formative that takes a ¡performative¿ as its content,
acts like a modifier on the usual order of affairs. It
is a request to the receiver to handle the embedded
performative as it could do because no response was
perceived by the sender the first time it sends the em-
bedded performative. The performative name may be
any of the performatives that requires a response.
3.2.3 Effectiveness
The use of resend allows managing the fault, in the
case of an operational fault, in the same way the retry
method does and with the same hypothesis (because
they are time redundancy methods). But one advan-
tage of the resend is that it is adapted to the knowl-
edge level of the agents what allows them to decide
whether to use it or not.
Moreover, the fact that the internal state of the agent
is not the same when receiving ”resend” avoids repe-
tition of the effects on the behavior of the agent what
corrects a disadvantage of the retry method. This,
plus the fact that the resend message has a differ-
ent treatment than the original message, implies that
A NEW PERFORMATIVE FOR HANDLING LACK OF ANSWERS OF AUTONOMOUS AGENTS
443

the original message and the resend message are not
processed with the same lines of code. This might
be compared to N-version programming and in some
way allows the Resend method to handle some devel-
opment faults which are permanent faults.
Another point concerning the handling of the behav-
ioral faults is that, the performative allows the other
agent to change its mind. Because the resend mes-
sage has a specific meaning, insisting on the fact that
the agent needs a response, if the agent has chosen not
to respond to the first message it can, if possible or if
interested, change its mind.
Another advantage to be noticed is that the message
encapsulation makes our method not confusable with
a stutter that is the repetition of the same message po-
tentially due to a development fault.
Finally, a cooperative diagnosis is possible because
the encapsulation allows the agents to identify the mo-
ment when the fault appeared and then eventually di-
agnose it with their common knowledge. For exam-
ple, if an agent receives no response to a request and
uses our method to handle this fault the other agent
can respond that it has already answered to the re-
quest and that the first message may have been lost
or ignored. Cooperative diagnosis is not investigated
further in this paper.
3.2.4 Implementation
Practically, one part of the resend protocol must be
applied after the detection of a fault; the other one into
the conversation state where the resend is received.
After the detection the agent that wants to use the re-
send protocol must implement the agent i part of the
protocol, see tab.1.
The difficulty of the resend method is: to under-
stand when an agent can receive a resend message,
because resend messages corresponds to exceptional
situations. Resend message treatment, agent j part of
the protocol, can be the same that when receiving the
nominal message but it can be useful to provide a dif-
ferent one if important treatment are involved. Since
the exact method for developing agents using our re-
send method depends a lot on the model and language
used for the agent, we will present in the next section
the method we use for our agents.
4 RESEND INTEGRATION
To present the integration of the resend protocol into
the behavior of the agent we will separate the behavior
of agent i (the one experiencing the EMP) and agent j
(the one receiving the resend performative). The nom-
Figure 3: Resend and agents behavior.
inal behavior of agent i in coordination with agent j is
depicted at the left part of fig.3, the right part depicts
agent i and agent j behaviors using the resend.
4.1 Agent i
The integration of the resend protocol is presented
only for the state 2 of the behavior of the agent i, in the
middle of fig.3. The agent behavior is the following:
• When the agent i detects the EMP it sends the
appropriate resend message to the agent j that
changes its internal state for the state 2bis;
• In this state agent i waits for: the previously ex-
pected response or a resend message and has a de-
tection means (like in any state);
• If the agent i receives a response it continues its
normal behavior as if it never used the resend (the
received answer may differ from the first one);
• If the agent i receives no response it considers that
the fault is a permanent fault and then must search
for another fault handler.
4.2 Agent j
The integration of the protocol is difficult because the
resend message can be received at different states of
the conversation. They are represented on the right
part of fig.3 by the white arrows. For a given conver-
sation state the agent may receive the resend message
corresponding to:
1. The nominal waited message, example: the nom-
inal message sent by agent i is ignored.
2. The previously received message, example: the
response sent by agent j to agent i was ignored.
3. The following message into the protocol, exam-
ple: the loss of the response sent by agent i.
The way the resend message is processed depends
on when it is received. It comes under the responsibil-
ity of the developer of the agent because it is context
dependant. It is also the case of the next state the re-
ceiving agent will reach.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
444

4.3 Resend Implementation
The implementation of the resend into the behavior
of the agent can be a quite complex task for the devel-
oper (like some meta-protocol proposed by FIPA).
Fortunately, in MAS when agents use predefined in-
teraction protocols the resend protocol can be imple-
mented once for all with this protocols. This means
that it can be given to the final developer of the agent
a skeleton of the interaction protocol with the resend
protocol. The developer has only the responsibility
to complete the protocols with decisions methods and
calculation operations but need not to wonder about
how to use the resend method.
4.4 Tests
The implementation was done with the conversation
based language presented in (Dev
`
eze et al., 2006).
The language allows the description of the behavior
of agents as a set of plans where states correspond to
the waiting of a message. Tests were made with lost
messages because, like explained in introduction, a lot
of different faults can lead to the error corresponding
to the EMP. Losing a message and having an agent
choosing not to respond are part of them.
The results of the experimentation are that the
handler succeeds when the fault does not last when
the resend message is sent. For example the resend
method does not allow handling the case when the
message sent by the agent i is ignored by the agent
j because it is overloaded and the corresponding re-
send message is received before the agent j is no more
overloaded and so ignored too.
This shows the importance of the used detection
means, for example the duration of the timeout, but it
cannot be investigate further into this paper.
5 DISCUSSION
This section will investigate some points and some
statements not developed about the resend handler.
5.1 Only Once
The reasons why we chose to send the resend mes-
sage only once, and why we do not apply the resend
method recursively, are the following:
• We propose a high level protocol so it is not de-
signed to handle low level communication faults,
moreover message loss are negligible.
Figure 4: Evaluation of the attributes of the handled fault
classes.
• If the same message is sent more than one time
it become confusable with a stutter what is some-
thing we want to avoid.
• Sending more messages can overload the agent.
• The other agent is autonomous, so it is not obliged
to answer and, moreover, it has maybe a good rea-
son not to answer (overloaded for instance).
• The other agent might be dead or buggy so it be-
comes useless to waste more time trying to com-
municate with it.
5.1.1 Prospects about Permanent Faults
The resend method is adapted to temporary faults and
so cannot guarantee that permanent faults will be han-
dled (even if some development faults can be han-
dled). In case of failure to manage the fault using the
resend, the agent has other possibilities adapted to its
knowledge level:
• To change its acquaintance: the agent can replace
the agent with which it is making a transaction to
obtain the needed result.
• To adapt its plan to the unexpected situation or
create a new plan to obtain the needed result in a
different way.
These methods are reconfiguration methods and so
are adapted to permanent faults. But they involve a
higher cost because they imply some explicit redun-
dancy: to change its acquaintance the agent needs
to find an available agent capable of delivering the
wanted service; to change its plans the agent needs
find an available agents capable of delivering the re-
quired new services. An evaluation of the fault classes
handled is presented fig.4.
5.2 Formal Verification
Formal verification of the entire behavior of the
agents is a difficult task, and formal verification of the
resend protocol is meaningless. Nonetheless, consid-
ering the resend protocol ”encapsulated” into an in-
teraction protocol permits to use verification methods
and to provide a robust interaction protocol with guar-
anteed properties, concerning the handling of tempo-
rary faults.
A NEW PERFORMATIVE FOR HANDLING LACK OF ANSWERS OF AUTONOMOUS AGENTS
445

We make the formal verification of our interac-
tion protocols with timed automatas realized with UP-
PAAL (Bengtsson et al., 1995). For example dead-
lock verification can be checked , as the fact that it is
always possible for the agents to reach the last state
of the protocol.
6 FUTURE WORK AND
CONCLUSIONS
This paper introduced and addressed the empty mail-
box problem presenting its causes, and particularly
the faults related to the specificities of MAS. After
this, the paper focused on the adaptation from an ex-
isting low level handler used into distributed systems
to our generic handler that fits agents knowledge level
and then presents the handled faults and the prospects
about the handling of permanent faults.
In future work the authors will investigate the di-
agnosis possibilities for the agents using the resend
method. As it was underlined in the paper, the agent
sending a resend message and the agent receiving it
have a partial view of the situation. The possibility of
diagnosis depends a lot on the state of the agent when
it receives the resend message.
A lot of work has also to be done with regard to the
effectiveness of fault tolerance methods, usually used
for distributed systems, to MAS. Particularly, since
MAS are compound with a low level entity (the plat-
form) and high level entities (the agents), the shar-
ing of the fault tolerance among the platform and the
agents must be defined precisely to eventually allow
the adaptation of other handlers to the agents.
REFERENCES
Avizienis, A., Laprie, J.-C., Randell, B., and Landwehr, C.
(2004). Basic concepts and taxonomy of dependable
and secure computing. In computer society, I., editor,
IEEE Transactions on dependable and secure comput-
ing, pages 11–33.
Barbuceanu, M. and Fox, M. S. (1995). Cool: A language
for describing coordination in multiagent systems. In
Lesser, V. and Gasser, L., editors, Proceedings of the
First International Conference oil Multi-Agent Sys-
tems, pages 17–24, San Francisco, CA, USA. AAAI
Press.
Bengtsson, J., Larsen, K. G., Larsson, F., Pettersson, P., and
Yi, W. (1995). UPPAAL - a tool suite for automatic
verification of real-time systems. In Hybrid Systems,
pages 232–243.
Dev
`
eze, B., Chopinaud, C., and Taillibert, P. (2006). Alba:
A generic library for programming mobile agents with
prolog. In PROMAS, pages 129–148.
Dragoni, N. and Gaspari, M. (2006). Crash failure de-
tection in asynchronous agent communication lan-
guages. Autonomous Agents and Multi-Agent Systems,
13(3):355–390.
Finin, T., Labrou, Y., and Mayfield, J. (1997). KQML as
an agent communication language. In Bradshaw, J.,
editor, Software Agents, Cambridge, MA. MIT Press.
FIPA, D. T. (2001). FIPA communicative act library speci-
fication.
Klein, M. and Dellarocas, C. (1999). Exception han-
dling in agent systems. In Etzioni, O., M
¨
uller,
J. P., and Bradshaw, J. M., editors, Proceedings of
the Third International Conference on Autonomous
Agents (Agents’99), pages 62–68, Seattle, WA, USA.
ACM Press.
Klein, M. and Dellarocas, C. (2000). A knowledge-based
approach to handling exceptions in workflow systems.
Computer Supported Cooperative Work, 9(3/4):399–
412.
Kuwabara, K. (1996). Meta-level control of coordination
protocols. In Second International Conference on
Multi-Agent Systems, pages 165–172.
Potiron, K., Taillibert, P., and Fallah-Seghrouchni, A. E.
(2007). A step towards fault tolerance for multi-
agent systems. In Languages, Methodologies and De-
velopment Tools for Multi-Agent Systems First Inter-
national Workshop, Revised Selected Papers. Lecture
Notes in Computer Science , Vol. 5118.
Searle, J. R. (1969). Speech Acts: An Essay in the Philoso-
phy of Language. Cambridge University Press.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
446
