
Integration of Tracked and Recognized Features for
Locally and Globally Robust Structure from Motion
Chris Engels
1
, Friedrich Fraundorfer
2
and David Nist
´
er
3,4
1
ESAT-PSI/VISICS, K.U. Leuven, Kasteelpark Arenberg 10
B-3001 Leuven-Heverlee, Belgium
2
Computer Vision and Geometry Group
Swiss Federal Institute of Technology
Zurich (ETH),CH-8092, Zurich, Switzerland
3
Center for Visualization and Virtual Environments
University of Kentucky, 1 Quality Street, Suite 800
Lexington, KY 40507-1464, USA
Abstract. We present a novel approach to structure from motion that integrates
wide baseline local features with tracked features to rapidly and robustly recon-
struct scenes from image sequences. Rather than assume that we can create and
maintain a consistent and drift-free reconstructed map over an arbitrarily long se-
quence, we instead create small, independent submaps generated over short peri-
ods of time and attempt to link the submaps together via recognized features. The
tracked features provide accurate pose estimates frame to frame, while the rec-
ognizable local features stabilize the estimate over larger baselines and provide a
context for linking submaps together. As each frame in the submap is inserted, we
apply real-time bundle adjustment to maintain a high accuracy for the submaps.
Recent advances in feature-based object recognition enable us to efficiently lo-
calize and link new submaps into a reconstructed map within a localization and
mapping context. Because our recognition system can operate efficiently on many
more features than previous systems, our approach easily scales to larger maps.
We provide results that show that accurate structure and motion estimates can be
produced from a handheld camera under shaky camera motion.
1 Introduction
Recent advances in object and scene recognition based on local region descriptors has
shown the possibility of highly efficient image matching and retrieval from a database.
In this paper, we examine the applicability of this recognition not just for retrieval, but
for the construction of 3D structure as well. Within a Structure from Motion (SfM)
framework, we show how to use scene recognition to maintain consistency not just on
a global scale, as is often exploited in SLAM applications, but also on a local scale
when otherwise faced with failure of egomotion estimation, feature tracking, etc. The
4
David Nist
´
er is currently with Microsoft Live Labs.
Engels C., Fraundorfer F. and Nistér D. (2008).
Integration of Tracked and Recognized Features for Locally and Globally Robust Structure from Motion.
In VISAPP-Robotic Perception, pages 13-22
DOI: 10.5220/0002341800130022
Copyright
c
SciTePress

SLAM community has understood the utility of structural recognition for loop closure
for some time now, and research on vision-based SLAM has been especially fruitful in
the past few years with the introduction of effective region descriptors, and SIFT [1] in
particular.
Our approach uses a recognition system similar to the one presented by Nist
´
er and
Stew
´
enius [2]. Rather than matching against descriptors in single images, we match
against descriptors of submaps generated by short image sequences. The submaps con-
sist of camera poses and 3D points associated with descriptors seen over multiple views.
This approach offers several advantages: we reduce the redundancy inherent in match-
ing against every descriptor in every image required to match new observations to the
existing reconstruction, and we reduce outlier descriptors by requiring that each de-
scriptor is initially seen in multiple views. Finally, by considering descriptors over a
submap (and therefore in world space) rather than an individual image, we provide a
more intuitive and natural connection between the descriptors and the true features in
the world that a camera is observing.
To stabilize the structure estimate, we use additional features tracked frame-to-
frame, and refine all points and cameras every time a pose is added using real-time
bundle adjustment. As each new submap is being created, we simultaneously attempt
to match descriptors from images in the submap to previously created submaps. This
process produces hypotheses for linking the new submap to another set of submaps.
Our approach can be used for creating reliable handheld SfM reconstructions and
provides a beneficial front-end and data association modules for a vision-based SLAM
system. Many relevant approaches assume either a small number of recognizable fea-
tures that can quickly reproduce the global coordinate frame, or smooth image mo-
tion produced by a steadily moving camera. Our model assumes constant failure in the
system without any explicit requirement on seeing previously recognizable landmarks
again. In order to create a long path, new sequences must be continuously recognized
and attached to older ones.
We review related work in the next section. Section 3 describes submap construction
in detail. Submap linking is discussed in Section 4. We provide several experiments in
Section 5, and Section 6 concludes.
2 Previous Work
As stated in Section 1, our recognition engine is very similar to the one presented in [2],
which is in turn largely based on work by Sivic and Zisserman [3]. Because of its com-
pact image representation and its efficient matching process, it is well suited for mobile
robot applications, including those operating in very large environments. The image
search finds similar images by matching local features. First, the local features are de-
tected in each image using the MSER detector [4]. Then a feature vector is computed
over a local region using the SIFT descriptor [5]. Each SIFT feature vector is quantized
into a vocabulary tree. A single integer value, called a visual word (VW), is assigned to
a 128-dimensional SIFT feature vector. This results in a very compact image represen-
tation, where each image is represented by a set of visual words. Matching two images
can be done by comparing the two lists of visual words. For image search applications
1414

the image database is set up as an inverted file. For each VW, the inverted file maintains
a list of image indices in which the visual word occurred. For an image query the in-
dexed lists of all VWs that occur in the query image are processed. Weighted votes are
collected for the images in the lists. The database image with the highest score is then
selected as the best match. The query process is very efficient: tests show that a query
in a 1 million image database (with an average number of 200 VWs per image) takes
0.02s. This results in a frame-rate of about 50Hz, well suited for real-time applications.
Because of the compact image representation, a 1 million image database can be stored
in less than 4GB, allowing it to be kept in RAM on current computers. Adding a new
image to the inverted file database requires constant time only, since it is only necessary
to add the image index to the corresponding VW lists. This time is almost negligible
compared to the query. MSER detection and SIFT feature computation can be done at
a frame-rate of 15Hz on 640 × 480 images.
Online SLAM and SfM systems very often use a Kalman Filter [6] or Extended
Kalman Filter (EKF) for smoothing out estimation error. They use this method pri-
marily because updates occur in constant time, which is necessary in the presence of
increasing observations and data. Offline systems can use bundle adjustment to itera-
tively minimize error, but this process can be very slow for large numbers of obser-
vations. Because we have a limited number of frames within each submap, we use an
online bundle adjuster for refinement of our submaps after each frame is added. Triggs
et al. [7] provides a detailed survey of bundle adjustment methods, while Engels et al.
[8] discusses specific efficiency requirements for running windowed bundle adjustment
at frame rate.
The Atlas framework created by Bosse et al. [9] generates local submaps (map-
frames) from laser range data and represents the world as a connectivity graph between
the submap coordinate frames. The framework performs localization through a Kalman
Filter. Later, Leonard and Newman [10] describe a SLAM algorithm that uses over-
lapping submaps in local coordinate frames. For efficiency, their system separates the
estimation of the internal state of each submap from the global location estimate for that
submap. While this approach precludes error correction within a submap after creation,
the authors demonstrate that the error within the estimate is acceptably close to that of
a full solution.
There are a number of vision-based SLAM approaches relevant to our system. Davi-
son et al. [11] demonstrate a real-time handheld monocular SLAM approach that tracks
a small number of points with high precision using an EKF. They focus on an enclosed
environment that has a bound on landmarks and known initial points that allow a metric
reconstruction, so scalability is not an issue, unlike the case in our paper. More interest-
ingly, Sim and Little [12] present a system that performs real time vision-based SLAM
using a stereo head and is designed with obstacle avoidance in mind. 36-dimensional
SIFT features are extracted and quantized into identifiers using a k-d tree approximate
nearest neighbor algorithm. A Rao-Blackwellised particle filter is used to solve the lo-
calization and mapping problem. Their landmark map uses an adapted version of the
FastSLAM data structure [13]. As mentioned in [2], the hierarchical k-means approach
has several orders of magnitude more descriptors than a k-d tree. Because their approach
uses a stereo head, determining the 3D location of each SIFT descriptor is simple. In our
1515

case, we need to observe the descriptor from multiple views whose computed position
is greatly determined by the structure estimate.
3 Construction of the Local Submap
We construct each submap in a local coordinate frame by tracking local feature points
and wide baseline features simultaneously. We generate pose estimates in a manner sim-
ilar to the monocular visual odometry scheme proposed in [14]. In that approach, the
authors track points over three views and compute initial pose estimates within a robust
RANSAC framework. The tracked features are then triangulated into 3D world points;
subsequent frames are computed via single-view pose using world-point to image-point
correspondences. After a certain number of frames, the method performs another three-
view pose estimation, stitches that estimate into the current coordinate system, and con-
tinues with single-view estimation. The idea is to prevent long term degradation of the
triangulated points that eventually causes the odometry to fail. This paper proposes a
different approach: instead of attempting to continuously compute relative camera mo-
tion in the presence of drift and degradation, we simply stop using the current coordinate
system and its related structure and restart in a separate submap. We leave connecting
the submaps to the linking step described in Section 4.
3.1 Local Feature Tracking
Our local feature tracker combines the advantages of tracking Harris corners [15] with
the KLT tracker [16]. Briefly, the tracker initializes feature points in the image based on
Harris corner strength, with the constraint that the points should be evenly-distributed
throughout the image. The algorithm computes frame to frame tracking via normalized
cross correlation on an image pyramid, which like the KLT tracker gives subpixel pre-
cision of the feature location, while the normalization provides robustness to varying
camera gain.
3.2 Tracking Features for Recognition and Wide Baseline Matching
The features tracked in Section 3.1 have several drawbacks. First, they are difficult to
track outside of a frame-by-frame basis, especially over wide baselines. If a feature is
lost in a single frame, it cannot be tracked further. Second, local features can not be
matched efficiently in any way useful for recognition. In addition to tracking local fea-
tures frame to frame, we also match wide baseline features as they occur. As discussed
in Section 2, we use the hierarchically-quantized visual words defined in [2]. When such
features are redetected over multiple—but not necessarily consecutive—frames, we tri-
angulate them to associate a 3D position to the point. We use the center of mass of the
MSER as our image point. While these features are highly redetectable, as shown in
[17], the computed center of mass is more sensitive to noise than are our local features,
which have subpixel precision. This sensitivity results in a higher degree of uncertainty
of the 3D position. We compensate for this error by including the wide baseline features
in a real-time bundle adjustment step.
1616
3.3 Real-time Bundle Adjustment
We use Levenberg-Marquardt bundle adjustment implemented according to Engels et
al.[8] to refine the structure of our submap. We refine our structure with several iter-
ations after every pose computation, using the cost function stated in Section 3.4. In
order to improve performance, we freeze cameras in place after a number of additional
poses are added. Besides improving the camera poses, we also seek to improve the 3D
locations of the visual words, which will be critical when linking submaps accurately.
3.4 Failure Detection
In an ideal environment, both wide baseline and tracked features would be redetected
accurately in every image in a sequence. However, in practical situations such as esti-
mating structure from a handheld camera, the camera motion may be shaky or rotate
rapidly. Feature points are lost or mismatched, which may cause the current reconstruc-
tion to fail. If such a submap were placed into the world, it could propagate the error
globally. We therefore need to detect when a reconstruction begins to fail and preempt
computation of that submap. Because we can reconnect subsequent submaps to the
global coordinate system at a later point, we can simply exclude the failed submap and
start a new one.
Our strategy for detecting estimation failures is based on searching for significant in-
creases in total reprojection error for each camera. To be robust to outliers, we use a
robust cost function on the assumption that the reprojection error follows a Cauchy
distribution:
C(P ) =
X
i
ln(1 +
e
2
i
σ
2
), (1)
where P is a camera, e
i
is the reprojection error of a world point-image point corre-
spondence, and sigma is a standard deviation. Because the bundle adjustment process
can move the camera pose and world points, C(P ) can change as additional poses
are added. An incorrect pose will have an effect on the structure and other poses after
bundling. If
C(P )
updated
− C(P )
original
C(P )
original
> c (2)
for some constant c, we judge the structure to be unstable and start a new submap.
Note that C(P )
updated
may decrease freely without causing failure, which of course
we would expect within bundle adjustment. We include additional failure conditions
for the loss of large percentages of feature points and poor initial reprojection error.
4 Efficient Recognition and Linking of Submaps
Rather than creating a database of all individual frames we create a database of submaps,
each built from a set of frames. This is possible as our submap representation allows us
to match a frame directly to a submap. It is not necessary to match individual frames
1717

and then figure out to which submap they belong. This is very beneficial as it also re-
duces the database size and time needed for matching. If storing individual frames in
the database, corresponding VWs between subsequent frames would be stored multi-
ple times, causing unnecessarily redundant data. In our case the submap contains only
one instance of a VW tracked through several frames. In addition, the matching time
is linear in the number of database entries (frames, submaps). When using submaps
we have fewer entries and thus the matching is faster. We adopt the matching scheme
from [2, 3] for efficient and scalable matching. The main reason for the high perfor-
mance is in the use of quantized descriptors and the use of an inverted file. The inverted
file stores the information in which submap each VW occurs. The inverted file con-
sists of a list for each possible VW. For each VW in the submap, the submap’s index is
added to the corresponding list. When adding a submap to the database, we only need
to insert the number of VWs seen in the submap. As each VW is represented as an
integer, this update is very efficient. A database query is also very efficient, however it
means to compute distance scores between the current frame and each stored submap.
Scoring is performed as described in [2]. Although scoring is linear in the number of
submaps the operations necessary for scoring a single frame depend on the number of
VWs in the frame to score, which is rather low. Therefore a single scoring operation
is extremely fast. Matching by score only gives a tentative match. This match is then
verified by geometric means. The submaps contain 3D reconstructions of the VWs. For
geometric verification, we run 3D-2D pose estimation between the submap and the cur-
rent frame. The geometry score is the number of inliers in the robust pose estimation
using RANSAC. The geometry score is a very strong criterion and makes the match-
ing very reliable. When computing the geometry score, the pose of the current frame
in the coordinate system of the submap is computed. This pose is stored and will be
used to compute the coordinate transformation between submaps. The individual frame
matches will be used as link hypotheses between submaps. If frames from a submap
match to more than one other submap we create multiple links.
To maintain links between the different submaps an undirected graph is used. There are
two different types of links: Topological links and metric link. A topological link can be
seen as hypothesis from the recognition scheme. For each topological link, the corre-
sponding coordinate transform is sought. If successfully estimated, we can upgrade the
topological link to a metric link, if not, we just keep the topological link. The graph data
structure allows us to transform all the submaps into a common coordinate system if a
global map is requested. An arbitrary submap can be chosen as the common coordinate
system. By graph search the necessary chains of transformations into the selected com-
mon coordinate system can be determined. A metric link is represented by a similarity
transform T , consisting of a rotation R, translation t and a scale factor s. The relative
camera positions within a submap are kept fixed.
4.1 Transformation between Submaps
Each submap has its own local coordinate system where the first camera is assumed to
be located at P = [I|0]. For each linked pair of submaps the transformation from one
coordinate system into the other is sought. In the matching step we already computed
camera poses from the frames of the current submap in the coordinate system of the
1818

matching submap. With two computed cameras we can establish the transform T . The
scale factor s can be computed from the distance ratio of matching camera pairs. R and
t can be computed from a single matching camera. This initial transformation allows us
to put the cameras and the 3D points of the submaps into a common coordinate frame.
A subsequent bundle adjustment on the two submaps is performed to increase accu-
racy. We then compute the transformation T again but now from the bundle adjusted
cameras. To output a global map, an arbitrary submap can be chosen to define a global
coordinate system, and all other submaps’ coordinate frames can be transformed into
that one. A final offline bundle adjustment step can optionally be performed to further
align submaps that were not optimized pairwise before. One attractive alternative to the
offline requirement would be to use the out-of-core bundle adjustment method proposed
by Ni et al. [18], which offers the possibility of aligning a larger number of submaps
within real-time constraints.
5 Experiments
5.1 Small Scale Turntable Sequence
To demonstrate the functionality of the method, we conduct a turntable experiment.
A cup is placed on a turntable and a complete turn is captured. The image sequence
consists of 158 frames. We apply our online SfM method to this image sequence. For
this experiment, we set the number of frames per submap to 32. Fig. 1 shows the results
of the successful structure and motion estimation. Five submaps are created and linked
together to form the circular camera motion. Only a small gap remains between the first
and last camera, which ideally should be at the same position. A final offline bundle
adjustment step closes the loop in Fig. 1(c).
(a) (b)
(c)
Fig. 1. Structure and motion for the turntable sequence. Each submap is shown in a different
color. The lines illustrate the links between the submaps. A small gap remains between the first
and the last camera, which we correct through bundle adjustment in (c).
1919
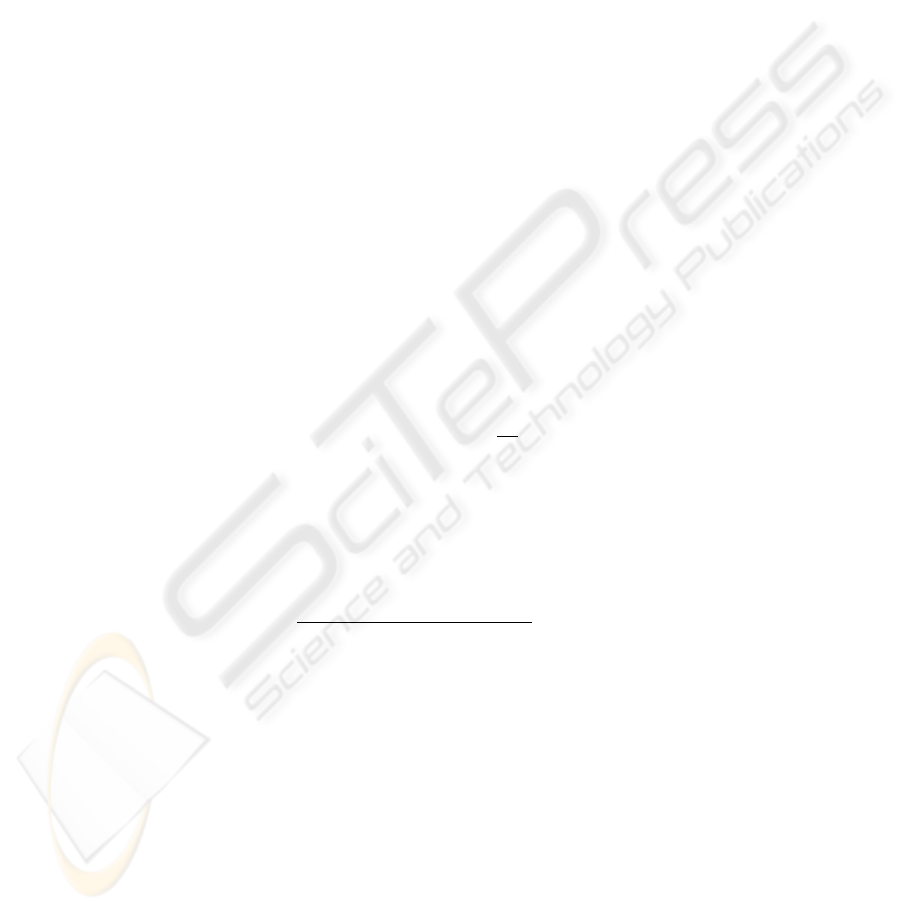
5.2 Erratic Motion
Erratic motion, dropped frames and shaking cameras are critical conditions for most
tracking based SLAM and structure from motion methods. In this experiment we demon-
strate that our method successfully can overcome such critical conditions. A hand-held
camera was moved in a sideway motion. At some point we started shaking the camera
and pointing it upward. Fig. 2(a) shows example images from the critical part of the
sequence. Fig. 2(b) shows the computed structure and motion from our method. The er-
ratic movements happened between the red and green submap. When the erratic move-
ments started, tracking started to fail and a new submap was initialized. With submap
linking, the new submap is rapidly connected to the previous track. The only delays are
the submap reinitialization and linking, which both occur within real-time constraints
in failure and non-failure cases.
.....
.....
.....
(a)
(b)
(c)
Fig. 2. Image sequence with shaking and erratic movements. (a) Images from the sequence around
the critical part. (b) The computed structure and motion. The erratic movements occured between
the red and green submap. When tracking failed a new submap was started and linked to the
previous submap. (c) A zoom into the critical part.
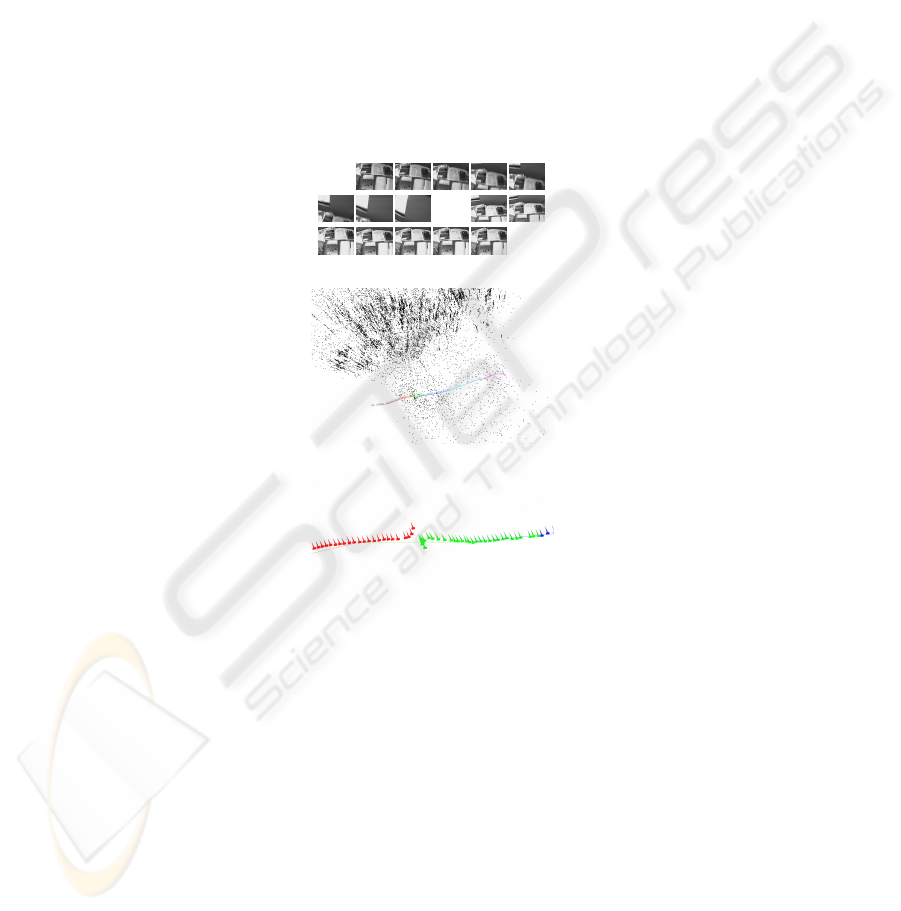
5.3 Indoor Experiment
The image sequence for the indoor experiment was acquired by walking around in a
room. Our SfM method was applied with the same settings as in the previous experi-
2020

Fig. 3. Camera motion for a sequence of 1015 frames. It consists of 21 submaps.
ments. Fig. 3 shows the estimated camera poses for the 1015 frames sequence. A total
of 21 submaps was created during reconstruction. It is notable that the scale between
the different submaps is estimated accurately for the whole sequence showing only a
marginally drift. As in 5.1 inaccuracies could be removed with a final off-line bundle
adjustment.
6 Conclusions
We demonstrate a Structure from Motion scheme that successfully combines recogni-
tion and tracking. The computed structure consists of linked local 3D reconstructions.
The local submaps combine wide baseline and locally tracked features and stabilize the
estimate via real time bundle adjustment. Links between submaps are efficiently de-
tected with a recognition engine. The experiments demonstrate the functionality of our
approach and show the potential for building larger scale reconstructions.
Acknowledgements
This work was partially funded by K.U. Leuven GOA.
References
1. Lowe, D.: Distinctive image features from scale-invariant keypoints. International Journal
of Computer Vision 60 (2004) 91–110
2. Nist
´
er, D., Stew
´
enius, H.: Scalable recognition with a vocabulary tree. In: Proc. IEEE
Conference on Computer Vision and Pattern Recognition, New York City, New York. (2006)
3. Sivic, J., Zisserman, A.: Video Google: A text retrieval approach to object matching in
videos. In: Proc. 9th IEEE International Conference on Computer Vision, Nice, France.
(2003) 1470–1477
2121

4. Matas, J., Chum, O., Urban, M., Pajdla, T.: Robust wide baseline stereo from maximally
stable extremal regions. In: Proc. 13th British Machine Vision Conference, Cardiff, UK.
(2002) 384–393
5. Lowe, D.: Object recognition from local scale-invariant features. In: Proc. 7th International
Conference on Computer Vision, Kerkyra, Greece. (1999) 1150–1157
6. Kalman, R.: A new approach to linear filtering and prediction problems. Transactions of the
ASME: Journal of Basic Engineering (1960) 35–45
7. Triggs, B., McLauchlan, P., Hartley, R., Fitzgibbon, A.: Bundle adjustment: A modern syn-
thesis. In: Vision Algorithms Workshop: Theory and Practice. (1999) 298–372
8. Engels, C., Stew
´
enius, H., Nist
´
er, D.: Bundle adjustment rules. In: Photogrammetric Com-
puter Vision. (2006)
9. Bosse, M., Newman, P., Leonard, J., Teller, S.: An atlas framework for scalable mapping.
In: IEEE International Conference on Robotics and Automation. (2003) 1234–1240
10. Leonard, J.J., Newman, P.M.: Consistent, convergent, and constant-time slam. In: Interna-
tional Joint Conference on Artificial Intelligence. (2003) 1143–1150
11. Davison, A., Reid, I., Molton, N., Stasse, O.: Monoslam: Real-time single camera slam.
IEEE Transactions on Pattern Analysis and Machine Intelligence 29 (2007) 1052–1067
12. Sim, R., Little, J.J.: Autonomous vision-based exploration and mapping using hybrid maps
and Rao-Blackwellised particle filters. In: Proceedings of the IEEE/RSJ Conference on In-
telligent Robots and Systems (IROS), Beijing, IEEE/RSJ, IEEE Press (2006) 2082–2089
13. Montemerlo, M., Thrun, S., Koller, D., Wegbreit, B.: Fastslam: A factored solution to the
simultaneous localization and mapping problem. In: Proc. of the AAAI National Conference
on Artificial Intelligence. (2002) 593–598
14. Nist
´
er, D., Naroditsky, O., Bergen, J.: Visual odometry. In: Proc. IEEE Conference on
Computer Vision and Pattern Recognition, Washington, DC. (2004) I: 652–659
15. Harris, C., Stephens, M.: A combined corner and edge detector. In: Alvey Vision Conference.
(1988)
16. Tomasi, C., Kanade, T.: Detection and tracking of point features. Technical Report CMU-
CS-91-132, Carnegie Mellon University (1991)
17. Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A., Matas, J., Schaffalitzky, F.,
Kadir, T., Van Gool, L.: A comparison of affine region detectors. International Journal
of Computer Vision 65 (2005) 43–72
18. Ni, K., Steedly, D., Dellaert, F.: Out-of-core bundle adjustment for large-scale 3d recon-
struction. In: Proc. 11th IEEE International Conference on Computer Vision, Rio de Jeneiro,
Brazil, IEEE (2007)
2222
