
MODULAR CONCURRENCY
A New Approach to Manageable Software
Peter Grogono
Computer Science and Software Engineering, Concordia University
Montr
´
eal, Qu
´
ebec, Canada
Brian Shearing
The Software Factory, Surrey, U.K.
Keywords:
Concurrency, processes, protocols, message-passing, isolation.
Abstract:
Software systems bridge the gap between the information processing needs of the world and computer hard-
ware. As system requirements grow in complexity and hardware evolves, the gap does not necessarily widen,
but it undoubtedly changes. Although today’s applications require concurrency and today’s hardware provides
concurrency, programming languages remain predominantly sequential. Concurrent programming is consid-
ered too difficult and too risky to be practiced by “ordinary programmers”. Software development is moving
towards a paradigm shift, following which concurrency will play a fundamental role in programming.
In this paper, we introduce an approach that we believe will reduce the difficulties of developing and maintain-
ing certain kinds of concurrent software. Building on earlier work but applying modern insights, we propose
a programming paradigm based on processes that exchange messages. Innovative features include scale-free
program structure, extensible modular components with multiple interfaces, protocols that specify the form
of messages, and separation of semantics and deployment. We suggest that it may be possible to provide
the flexibility and expressiveness of programming with processes while bounding the complexity caused by
nondeterminism.
1 INTRODUCTION
Mainstream programming languages are now, and
always have been, sequential languages with side-
effects. Concurrency, if present, has usually been pro-
vided by libraries, although this is known to be unsafe
(Boehm, 2005). Many alternatives have been pro-
posed, including functional, logic, single-assignment,
dataflow, and process-based languages, but none have
achieved widespread, industrial use so far. In particu-
lar, concurrent programming has either been confined
to particular applications or hidden in operating sys-
tems and middleware.
Concurrency has become more important during
the last decade for two reasons. The first reason is the
transition from single-processor applications to dis-
tributed applications. In particular, the rise of net-
work service programming has led to the need for
servers handling many concurrent requests. The sec-
ond reason is that processor clock rates increased until
they reached about 3GHz a few years ago, and then
stopped increasing, signalling the end of a fifteen-
year “free lunch” (Sutter and Larus, 2005). Moore’s
Law, predicting a steady increase in chip density, has
continued to hold. Architects seeking to increase
throughput with constant clock rates but more transis-
tors have followed the obvious path, giving us multi-
core chips. Effective use of multicore chips requires
concurrent programming.
Computing communities are addressing the con-
currency issue in a variety of ways, ranging from
instigating basic research to ignoring it altogether.
Much of the software industry has taken the nat-
ural approach of incremental addition to tried and
tested techniques. Specifically, object oriented pro-
gramming, the currently dominant paradigm, is work-
ing well, and concurrency can be achieved by multi-
threading object oriented programs.
Object oriented programing languages, however,
are already very complex. Java, for instance, pro-
vides fourteen different ways of controlling access
to a variable. Limitations of object oriented pro-
47
Grogono P. and Shearing B. (2008).
MODULAR CONCURRENCY - A New Approach to Manageable Software.
In Proceedings of the Third International Conference on Software and Data Technologies - PL/DPS/KE, pages 47-54
DOI: 10.5220/0001870900470054
Copyright
c
SciTePress
C
1
C
2
P
1
P
2
V
C
3
P
3
C
4
P
4
c
1
c
2
c
3
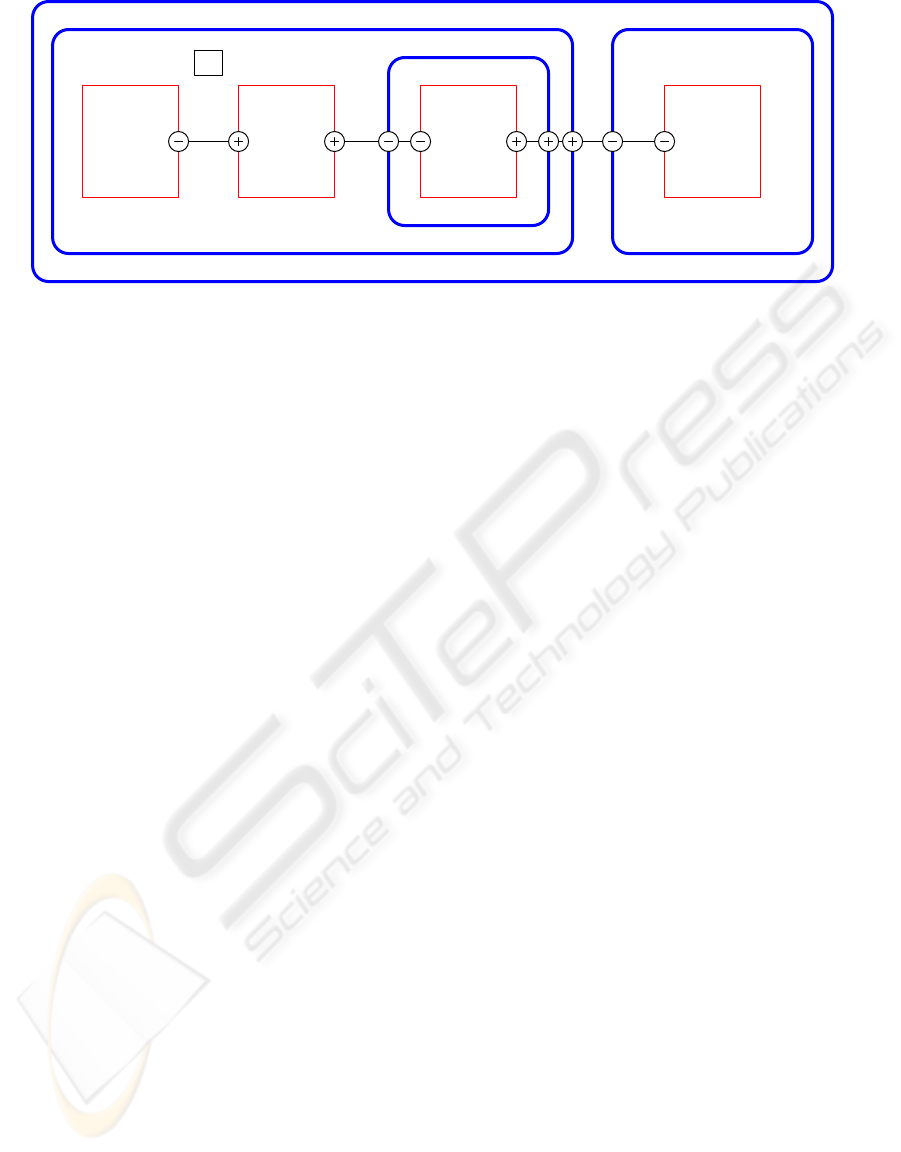
Figure 1: Structure of a µE program.
gramming are being addressed by adding yet more
features. Adding concurrency to existing object ori-
ented languages may make them unmanageable (Lee,
2006).
This suggests an approach that is somewhat more
radical: we can make use of the valuable lessons
that we have learned from object oriented program-
ming, but incorporate them into a process oriented
language. Our proposal is simple to state: instead of
programming with objects that invoke one another’s
methods, we advocate programming with processes
that exchange messages.
There are a number of problems with the process
oriented approach. Perhaps the most obvious objec-
tion to it is that processes have been tried but have
never caught on. Successful languages, such as Ada
and Erlang, provide processes but do not use them as
the basic abstraction mechanism, and have restricted
domains of application. Efficiency is a potential prob-
lem: context-switching between processes is typically
slower than invoking functions. Most sequential pro-
gram development relies on informal reasoning tech-
niques that are inadequate for concurrent program de-
velopment.
Our defence against these arguments is that times
and circumstances have changed. Computers have
changed radically during the last thirty years, and
so have the programs that run on them. In this pa-
per, we examine the implications of a simple idea:
the fundamental programming abstraction should be
a process rather than an object or a method. Starting
with this idea, we introduce a simple process oriented
language, with the long-term goal of introducing an
industrial-strength, process oriented language. The
results reported in this paper are based on our experi-
ence with a prototype compiler written for the simple
form of the language.
2 PROCESS PROGRAMMING
The language that we are proposing is called Eras-
mus, after the Dutch humanist Desiderius Erasmus
(1466?–1536). The prototype language described in
this paper is a subset of Erasmus called microEras-
mus, abbreviated to µE.
2.1 Program Structure
A µE program consists of cells and processes, mutu-
ally nested to any depth. Cells define the structure of a
program and processes determine its behaviour. Cells
come in all sizes: a cell might be a single character
or a distributed application. Cells are intended to be a
first step towards scale-free programming.
A cell contains processes and variables. The cell
has a single thread of control that is shared by all of
its top-level processes (that is, those processes that are
not nested in cells). The processes also share access
to the variables. Consequently, the processes within a
cell are effectively coroutines. Programmers must be
aware that the value of a shared variable may change
when a process blocks for communication, but the
tricky race conditions that may arise when processors
access shared variables concurrently cannot occur.
Cells and processes communicate using ports and
channels. A channel is connected to two ports, desig-
nated the client and the server, respectively. These
names determine the direction of messages in the
channel and have no other significance: a process may
have several ports and may be a client with respect to
some and a server with respect to others. Communi-
cation is symmetric: a demand may come from the
sender (“push”) or from the receiver (“pull”).
Figure 1 illustrates these ideas. A cell is drawn
with a thick outline with curved corners; a process
is drawn with a thin outline with sharp corners. The
ICSOFT 2008 - International Conference on Software and Data Technologies
48

start
stop
apple
orange
Figure 2: LTS corresponding to the protocol [start;
*(apple | orange); stop].
outer cell, C
1
, corresponds to the “main program”,
which consists of two nested cells, C
2
and C
4
. Pro-
cesses P
1
and P
2
share a single thread of control and
both have access to variable V . Cell C
2
has a third
process, P
3
but, since P
3
is nested inside cell C
3
, it has
its own thread and cannot access V .
The processes communicate using the channels c
1
,
c
2
, and c
3
. With respect to channel c
1
, process P
1
is a
client (indicated by “−”) and P
2
is a server (indicated
by “+”). Process P
3
acts as a client with respect to c
2
and as a server with respect to c
3
.
2.2 Protocols
Each channel has a protocol that determines the type
and sequence of messages that it can carry. Protocols
are defined in the same way as regular expressions,
with operators for sequence (;), alternation (|), and
repetition (*).
The compiler checks that each server satisfies its
clients. Satisfaction is defined as a partial order on
labelled transition systems (LTS). A LTS (Q, L,T ) is
a labelled, directed graph with nodes (states) Q, edge
labels, L, and edges (transitions) T . Formally, S w C
(“S satisfies C”) if there is a mapping that preserves
labels from the transitions of C to the transitions of S.
From a process or protocol, P, the corresponding LTS,
L (P), can be constructed. Given a server process, S,
its protocol S
p
, a client process C, and its protocol C
p
,
the compiler constructs the respective LTS and checks
that
L (S) w L (S
p
) w L (C
p
) w L (C).
Constructing an LTS from a protocol is straight-
forward: Figure 2 shows an example. A process has
an LTS corresponding to each of its ports. To con-
struct an LTS, the process is sliced with respect to
the port. That is, reads and writes to the port and
associated control structures are retained, and every-
thing else is discarded. Consequently, the compiler
checks the behaviour of each pair of communicating
processes. General behaviour checking requires non-
local invariants, a topic for future research.
2.3 An Example
We use a simple, textbook example, the bounded
buffer, to illustrate these ideas and µE syntax. The
protocol buffProt specifies a communication con-
sisting of zero or more messages with label msg and
type Text, followed by a signal stop:
buffProt = [ *( msg: Text ); stop ]
The process buffer, shown in Figure 3, has two
port parameters, in and out. It acts as both a
server (+buffProt) with respect to in and as a client
(-buffProt) with respect to out. If a process ac-
cesses shared variables in its cell (buffer does not),
these variables would be listed as parameters. The
bar (|) at the end of the second line indicates the end
of its parameter list. The process receives a series of
text messages from a client and sends the same mes-
sages in the same sequence to a server, buffering up
to ten messages in a cyclic array. The last message is
the signal, stop; process buffer forwards this signal
and then terminates.
Communication statements may be written any-
where in a process. However, if the process must
choose between one of several actions depending on
the readiness of its ports, the select statement is
used. The loopselect statement used in Figure 4
is simply a repeated select statement; the loop ter-
minates when an exit statement is executed.
The body of a select statement consists of a set
of branches. Each branch consists of a Boolean ex-
pression B between bars, a communication statement
C, and a sequence S of further statements. A branch is
enabled if B is true and the channel associated with
C is waiting to communicate. If no branches are en-
abled, the statement blocks until a branch becomes
ready. If one branch is enabled, it is executed. If more
buffer = process
in: +buffProt; out: -buffProt |
buff: Integer indexes Text;
MAX: Integer = 10;
count, i, j: Integer := 0;
loopselect fair
|count < MAX| buff[i] := in.msg;
i := (i + 1) % MAX;
count += 1
|count > 0| out.msg := buff[j];
j := (j + 1) % MAX;
count -= 1
|| in.stop; out.stop; exit
end
end
Figure 3: A µE process.
MODULAR CONCURRENCY - A New Approach to Manageable Software
49

writer = ...
buffer = // see above
reader = ...
main = ( wp, rp: buffProt;
writer(wp);
buffer(wp, rp);
reader(rp) )
main()
Figure 4: A µE program.
than one branch is enabled, one branch is chosen ac-
cording to a policy, which may be fair, as in this
example, ordered, or random. The semantics of a
select statement specifies that, when it terminates,
exactly one branch has been executed.
Within the body of the process, the assignment op-
erator, :=, is used in both its normal sense of variable
assignment and for communication. In the statement
buff[i] := in.msg, which reads a message into the
buffer, in is a port name and msg is a typed field of the
protocol associated with the port. The key point here
is that the means of communication (transfer within a
memory space, between memory spaces, over a net-
work, etc.) is not specified by the source code, but at
a higher level.
Figure 4 outlines the structure of a complete pro-
gram that uses process buffer. There are two other
processes, writer and reader, whose bodies are
omitted. The definition of main declares channels wp
and rp and the three processes, which are linked by
the channels. The last line, main(), instantiates the
cell and its processes.
Input ports behave like rvalues and output
ports behave like lvalues. A statement such as
p.a := q.b + r.c is allowed and can be para-
phrased as “read b from q and c from r in either or-
der, add them, and send the result as field a of port
p”. This syntax is more concise and flexible than
the commonly-used operators such as ! (write) and
? (read).
Given only a source program such as the one in
Figure 4, the µE compiler generates code for a sin-
gle processor. The compiler also accepts a second file
that provides a mapping from processes to processors.
With this information, it can generate code for a dis-
tributed application.
Ports and channels are “first-class citizens” that
can be passed from one process to another. Dynamic
data structures are built using processes and chan-
nels. For example, a tree could be represented with
a process at each node and channels as links. The
processes can be created at the level of the enclosing
cell, in which case they share a thread, or they can be
nested within cells, in which case each node has its
own thread.
Programming with µE requires a change of atti-
tude on the part of the programmer. Processes are the
basic units of computation. Programmers should no
more worry about introducing new processes into a
program than they currently worry about introducing
a new method or a new object into an object oriented
program. On the other hand, programmers will have
to worry a lot more about correctness and will have to
be willing to embrace formal reasoning techniques.
For a more detailed description of µE, see (Gro-
gono and Shearing, 2008).
3 DISCUSSION
The object oriented programming model has many
advantages that we do not want to give up. In fact,
as a first approximation, programming in µE is some-
what similar to programming in object oriented pro-
gramming, with cells replacing classes and processes
replacing methods. In this section, we look more
closely at the differences between the paradigms and
give our reasons for preferring processes.
3.1 Adapting to Change
Since process-oriented languages have been available
for a long time, but have never become mainstream,
it is important to explain what has changed to make
process oriented programming important.
There have been three significant changes. First,
since 2004, chip manufacturers have been able to of-
fer higher performance by providing more processors
rather than higher clock speeds. Second, the prevail-
ing paradigm, object oriented programming, has be-
come increasingly complex. Multithreaded object ori-
ented programs will be very hard to develop, main-
tain, and refactor (Lee, 2006). Third, we have con-
siderably more experience of programming language
design and usage than we had 30 years ago. µE ex-
ploits these changes in ways described below.
Coupling. The need for weak coupling between
software modules is widely understood but not easy
to achieve in object oriented programming. An object
has two interfaces: the services it offers and the re-
sources it needs. The first of these, usually called the
interface, is explicit but the second is implicit. This
means, for example, that when an object is moved to
another processor, it will drag an unpredictable num-
ber of other objects along with it.
The declaration of a µE process includes both the
services it offers and those that it requires; there are no
ICSOFT 2008 - International Conference on Software and Data Technologies
50

hidden dependencies. A process that requires special
resources obtains them through its ports. The con-
dition for moving a cell is just that its ports can be
connected in its new environment.
Protocols. Protocols determine not only the mes-
sages that the cell can process but also their sequence.
Of course, the constraints on sequencing depend on
the form of the protocol. A protocol with the form
[∗(m
1
|m
2
|· ··|m
k
)] is equivalent to a class with meth-
ods m
1
,m
2
,. . ., m
k
. However, protocols can specify
more complex interaction patterns and can represent
asymmetries: for example, a client typically needs
only a subset of the services offered by the server that
it is connected to. Moreover, a cell may have several
ports, each with its own protocol.
Small Components. The larger a module, the
harder it is to reuse. Object oriented programming
encourages small methods but not small classes. Pro-
cesses encourage a “do one thing well” approach that
produces small, reusable components. Several related
processes can be packed into a cell with a simple in-
terface, analogously to the Fac¸ade pattern.
Localized Threads. An object oriented program
without concurrency has, by definition, a single thread
of control that meanders through the entire program.
In multithreaded object oriented programs, threads
also tend to be long, typically visiting many objects
during their lifetime. This is one of the factors that
makes concurrent object oriented programming diffi-
cult: an object may be active in multiple threads si-
multaneously.
In µE, a thread is restricted to a single cell. This
gives cells more autonomy than objects; they have
full control over their resources. Access to shared re-
sources must still be controlled, of course, but this
can be done at a higher level than threads. Reasoning
about threads is simplified.
Semantics versus Deployment. The language de-
fines the semantics of communication and provides a
single operator (:=) for all forms of communication.
The deployment of the program—that is, the map-
ping of software components to available hardware—
is separated from the source code (Lameed and Gro-
gono, 2008). Static mapping has limitations. For ex-
ample, it is unsuitable for applications that generate
many processes on the fly, or require dynamic load-
balancing. We hope to address these kinds of prob-
lems in future research.
Abstraction Level. An object oriented program can
be transformed to a procedural program, but the con-
verse transformation is generally infeasible. (It would
be possible to use heuristics to find implied objects in
a procedural program, but the found objects probably
would not be the “real” objects.) Similarly, a process
oriented program can be transformed to an object ori-
ented program, but not vice versa. In this sense, pro-
cess oriented programming adds a new level of ab-
straction to the programming language hierarchy.
3.2 Performance Issues
Clearly, performance of process oriented programs
will be an important issue. We address performance
in several ways.
First, as mentioned, the compiler is given a map-
ping from cells to processors and memory spaces.
Communication within a memory space can be im-
plemented efficiently by memory moves. Processes
with simple protocols can be implemented as func-
tions: external communication will be performed by
their cells. Small functions can be inlined.
Top-level processes within a cell run as corou-
tines. In many cases, however, a process can be trans-
formed into sequential code. The transformation was
introduced by Jackson (1978), who called it “inver-
sion”. When inversion is possible, a cell containing
many processes could be implemented as efficient, se-
quential code. Trade-offs must be considered, how-
ever; in a processor-rich environment for which high
performance requires concurrency, inversion might
actually be counter-productive.
An important question remains. Assuming that
many processors are available, how effectively will a
process oriented program use them? Some of the op-
timizations mentioned above translate parallel code to
sequential code, which may not help.
We have written and tested many small programs
in µE. The results of these experiments suggests that
concurrency arises more naturally than might be ex-
pected, provided that problems are decomposed into
small enough processes. We speculate that this will
enable Erasmus programs to execute efficiently on
appropriate architectures. More work will be needed
with programs of realistic size to verify this hypothe-
sis.
4 RELATED WORK
Work related to ours can be divided into two cate-
gories: research within the current framework that
aims to extend object oriented languages with abstrac-
tions for concurrency; and research directed towards
a “paradigm shift” that aims to bring concurrent lan-
guages into the mainstream.
MODULAR CONCURRENCY - A New Approach to Manageable Software
51

Though we now see the need for a paradigm shift,
the potential advantages of loosely-coupled concur-
rent processes were recognized forty years ago:
We have stipulated that processes should be
connected loosely; by this we mean that apart
from the (rare) moments of explicit intercom-
munication, the individual processes them-
selves are to be regarded as completely inde-
pendent of each other. (Dijkstra, 1968)
UNIX
r
provided an early demonstration of the
possibilities of lightweight processes. In particu-
lar, pipes (introduced by Douglas McIlroy) made it
easy to build complex tasks from simple components.
Pipes are useful in spite of their being limited to one
input and one output, and character streams.
Hoare (1978) introduced Communicating Sequen-
tial Processes (CSP) and Milner (1980) introduced
a Calculus of Communicating Systems (CCS), both
systems for reasoning about communicating con-
current processes. Erasmus processes communi-
cate synchronously, as do processes in CSP. Syn-
chronous communication is more fundamental than
asynchronous communication because we can de-
couple two communicating processes by inserting a
buffer process between them.
CSP was developed into a full-fledged program-
ming language called Occam (May, 1983). Occam’s
descendant, Occam-π (Barnes and Welch, 2006) has
a number of features that are relevant to our project.
Occam-π demonstrates the possibility of efficient ex-
ecution of many small processes; programs with mil-
lions of processes can be run on an ordinary laptop. It
also provides mobile processes, which are processes
that may be suspended, sent to another site, and re-
sumed. Occam-π has a formal semantics based on
Milner’s (1999) π-calculus.
Jackson was an early proponent of concurrent pro-
cesses. He considered the hardware of the time to be
too primitive to actually implement concurrency di-
rectly, but he demonstrated the advantages that accrue
from modelling a system as a set of processes:
The basic form of model is a network of pro-
cesses, one process for each independently ac-
tive entity in the real world. These processes
communicate by writing and reading serial
data streams or files, each data stream con-
necting exactly two processes; there is no pro-
cess synchronization other than by these data
streams. (Jackson, 1980)
In Jackson’s method, processes introduced in the de-
sign phase were implemented as sequential code.
With modern hardware, they could be implemented
directly as processes.
Although Simula (Nygaard and Dahl, 1981) intro-
duced many of the features that we now call “object
oriented”, the first language that used objects as the
basic abstraction was Smalltalk. Kay (1993) viewed
object-oriented programming as a new paradigm in
which each object was an abstraction of a computer.
It is interesting that both Simula and Smalltalk pro-
vided non-preemptive concurrency, a feature that was
not copied in later languages.
There were a number of early efforts to combine
objects and concurrency. So many, in fact, that the
acronym “COOL” was popular for a while. Inheri-
tance was problematic, however, leading to the iden-
tification of the “inheritance anomaly” (Matsuoka and
Yonezawa, 1993). More recently, aspects have been
proposed as a way of avoiding the anomaly (Milicia
and Sassone, 2004).
Ada (1995) is one of the few industrial-strength
languages that provides secure concurrency. In spite
of its advantages, its use has been restricted mainly
to the aerospace industry. The select statement of
µE is very similar to the “selective wait” of Ada. Ada
also provides features for real-time programming, an
area that we have not considered yet.
Brinch Hansen (1996) designed a number of lan-
guages for concurrent programming. Joyce was de-
veloped as a programming language for distributed
systems (Brinch Hansen, 1987). The program com-
ponents are agents which exchange messages via syn-
chronous, typed channels. The features of Joyce
that distinguished it from earlier message-passing lan-
guages such as CSP were: port variables; channel al-
phabets; output polling; channel sharing; and recur-
sive agents. Static checking ensured a higher degree
of security than was provided by earlier concurrent
languages. Our prototype version of Erasmus is quite
similar to Joyce in concept and makes use of several
of Brinch Hansen’s ideas. For example, select state-
ments in Erasmus are similar to poll statements in
Joyce.
Hermes is an experimental language developed
at IBM but never used in production (Strom, 1991;
Khorfage and Goldberg, 1995). Since Hermes was
designed as a system language for writing applica-
tions that might not be protected by hardware and op-
erating system facilities, a new process is provided
only with the capabilities that it needs and can ob-
tain additional capabilities only by explicitly request-
ing them. Erasmus also uses a capability model (not
discussed here) to provide protection and to reduce
coupling.
The language now known as Erlang started life
in an Ericsson laboratory as a Smalltalk program but
quickly evolved into a Prolog program (Armstrong,
ICSOFT 2008 - International Conference on Software and Data Technologies
52

2007). Erlang is now often cited as a “functional” lan-
guage because individual processes are coded without
side-effects (which is why Erlang is often referred to
as a “functional” language). The goals of Erasmus are
in many ways similar to those of Erlang but we place
greater emphasis on state. Erlang uses asynchronous
message passing which eliminates shared references
between processes and maximizes process indepen-
dence (van Roy and Haridi, 2001, page 387). In Eras-
mus, it is easy to provide buffer processes for asyn-
chronous communication.
The Mozart Programming System (van Roy and
Haridi, 2001) is based on the language Oz, which
supports “declarative programming, object-oriented
programming, constraint programming, and concur-
rency as part of a coherent whole”.
1
Oz provides
both message-passing and shared-state concurrency.
Its designers state that message-passing concurrency
is important because it is the basic framework for
multi-agent systems, the natural style for distributed
systems, and suitable for building highly reliable sys-
tems. It is for these very reasons that we have adopted
message-passing as the basic communication mecha-
nism in Erasmus.
Microsoft’s C# relies on the multi-threaded envi-
ronment .NET. There are various proposals for ex-
tending C# with concurrency primitives at a higher
level of abstraction than that provided by .NET. Ben-
ton et al. (2004) have introduced asynchronous meth-
ods and chords in Polyphonic C#. Active C# en-
hances C# with concurrency and a new model for ob-
ject communication (G
¨
untensperger and Gutknecht,
2004). An activity is a class member that runs as a
separate thread within an object. Communication is
controlled by formal dialogs. Activities and dialogs
provide an expressive notation that can be used to
solve complex concurrent problems.
The Java Application Isolation API allows compo-
nents of a Java application to run as logically indepen-
dent virtual machines (Soper, 2002). The motivation
for “isolates” is to prevent interference between com-
ponents and to “simplify construction of obviously se-
cure systems” (Lea et al., 2004).
Henzinger et al. (2005) have shown how to syn-
thesize “permissive interfaces” that allow clients to be
checked for compatibility with libraries. These inter-
faces are similar to Erasmus protocols.
The Singularity operating system currently un-
der development at Microsoft Research “consists of
three key architectural features: software-isolated
processes, contract-based channels, and manifest-
based programs” (Hunt and Larus, 2007). Singu-
1
Quoted from http://www.mozart-oz.org/, accessed
2008/03/15.
larity and Erasmus share several common features,
notably the emphasis on processes and on checked
communications—contract-based channels in Singu-
larity and protocols in Erasmus. Since Singularity de-
fines contracts in terms of general state machines and
Erasmus protocols are regular expressions, the two
systems are formally equivalent.
UML 2 has responded to the call for concurrency
by providing more flexibility than UML 1 for model-
ing concurrent systems (Object Management Group,
2007). Concurrency is modelled by forks and joins
in control flows, as in UML 1, but there is no syn-
chronization following a fork. Following the practice
of architecture description languages, system com-
ponents have ports and communicate via connectors.
Many UML 2 models map naturally into Erasmus
programs.
5 CONCLUSIONS
Hoare (1974) said that language designers should
consolidate, not innovate. We have based µE on con-
cepts that have been used in the past and are well-
understood. We have introduced a few new ideas—
the cell in which processes run as coroutines, for
example—but, on the whole, it is the particular com-
bination of features that is new.
It is widely acknowledged that it will be diffi-
cult to write multithreaded object oriented programs
that use many concurrent processors efficiently. We
suggest that process oriented programs may be better
suited to this task. We have several reasons for believ-
ing this. First, cells are less tightly coupled than ob-
jects because cells exchange data rather than passing
control. Second, the fact that control never crosses
process or cell boundaries will contribute to simpli-
fied reasoning. Third, protocols allow more precise
specifications of allowable behaviours than interfaces
defined by methods. Moreover, the declaration of a
process or cell specifies both the services it provides
and those that it needs, not just the services that it pro-
vides. Finally, there are no race conditions, because
each variable is accessed by a single thread.
There are some trade-offs. Superficially, Erasmus
programs look more complex, but this is because all
dependencies appear explicitly in the code. (In object
oriented programming, if a class C has instance vari-
able x : D, then C uses D, although this dependency
appears in neither interface.)
Although much remains to be done, we believe
that process oriented programming, in some form or
another, will prove to be superior to object oriented
programming for applications of the future.
MODULAR CONCURRENCY - A New Approach to Manageable Software
53

ACKNOWLEDGEMENTS
The research described in this paper received support
from the Natural Sciences and Engineering Research
Council of Canada. We thank the reviewers for their
helpful comments.
REFERENCES
Ada (1995). Ada 95 Reference Manual. Re-
vised International Standard ISO/IEC 8652:1995.
www.adahome.com/rm95. Accessed 2008/03/12.
Armstrong, J. (2007). A history of Erlang. In HOPL
III: Proceedings of the Third ACM SIGPLAN Confer-
ence on the History of Programming Languages, New
York, NY, USA, pp. 6.1–6.26. ACM Press.
Barnes, F. R. and P. H. Welch (2006). Occam-π :
blending the best of CSP and the π-calculus.
www.cs.kent.ac.uk/projects/ofa/kroc. Accessed
2008/03/13.
Benton, N., L. Cardelli, and C.Fournet (2004, Septem-
ber). Modern concurrency abstractions for C]. ACM
Transactions on Programming Languages and Sys-
tems 26(5), 769–804.
Boehm, H.-J. (2005). Threads cannot be implemented as a
library. In Proceedings of the 2005 ACM SIGPLAN
Conference on Programming Language Design and
Implementation (PLDI ’05), pp. 261–268.
Brinch Hansen, P. (1987, January). Joyce—a programming
language for distributed systems. Software—Practice
and Experience 17(1), 29–50.
Brinch Hansen, P. (1996). The Search for Simplicity—
Essays in Parallel Programming. IEEE Computer So-
ciety Press.
Dijkstra, E. W. (1968). Cooperating sequential processes. In
F. Genuys (Ed.), Programming Languages: NATO Ad-
vanced Study Institute, pp. 43–112. Academic Press.
Grogono, P. and B. Shearing (2008). MEC Reference
Manual. http://users.encs.concordia.ca/∼grogono/-
Erasmus/erasmus.html.
G
¨
untensperger, R. and J. Gutknecht (2004, May). Active
C]. In 2nd International Workshop .NET Technolo-
gies’2004, pp. 47–59.
Henzinger, T. A., R. Jhala, and R. Majumdar (2005). Per-
missive interfaces. In ESEC/FSE-13: Proceedings of
the 10th European Software Engineering Conference
(held jointly with 13th ACM SIGSOFT International
Symposium on Foundations of Software Engineering),
pp. 31–40.
Hoare, C. A. R. (1974). Hints on programming language
design. In C. Bunyan (Ed.), Computer Systems Relia-
bility, Volume 20 of State of the Art Report, pp. 505–
534. Pergamon. Reprinted in (Hoare and Jones, 1989).
Hoare, C. A. R. (1978, August). Communicating sequential
processes. Communications of the ACM 21(8), 666–
677.
Hoare, C. A. R. and C. Jones (1989). Essays in Computing
Science. Prentice Hall.
Hunt, G. C. and J. R. Larus (2007). Singularity: rethinking
the software stack. SIGOPS Operating System Review
41(2), 37–49.
Jackson, M. (1978). Information systems: Modelling, se-
quencing and transformation. In Proceedings of the
3rd International Conference on Software Engineer-
ing (ICSE 1978), pp. 72–81.
Jackson, M. (1980). Information systems: Modelling, se-
quencing and transformation. In R. McKeag and A.
MacNaughten (Eds.), On the Construction of Pro-
grams. Cambridge University Press.
Kay, A. C. (1993). The early history of Smalltalk. ACM
SIGPLAN Notices 28(3), 69–95.
Khorfage, W. and A. P. Goldberg (1995, April). Hermes
language experiences. Software—Practice and Expe-
rience 25(4), 389–402.
Lameed, N. and P. Grogono (2008). Separating program
semantics from deployment. These proceedings.
Lea, D., P. Soper, and M. Sabin (2004). The Java Iso-
lation API: Introduction, applications and inspira-
tion. bitser.net/isolate-interest/slides.pdf. Accessed
2007/06/14.
Lee, E. A. (2006, May). The problem with threads. IEEE
Computer 39(5), 33–42.
Matsuoka, S. and A. Yonezawa (1993). Analysis of in-
heritance anomaly in object-oriented concurrent pro-
gramming language. In Research Directions in Con-
current Object-Oriented Programming, pp. 107–150.
MIT Press.
May, D. (1983, April). Occam. ACM SIGPLAN No-
tices 18(4), 69–79.
Milicia, G. and V. Sassone (2004). The inheritance
anomaly: ten years after. In SAC ’04: Proceedings
of the 2004 ACM Symposium on Applied Computing,
New York, NY, USA, pp. 1267–1274. ACM.
Milner, R. (1980). A Calculus of Communicating Systems.
Springer.
Milner, R. (1999). Communicating and Mobile Systems:
The π Calculus. Cambridge University Press.
Nygaard, K. and O.-J. Dahl (1981). The development of the
SIMULA language. In R. Wexelblat (Ed.), History
of Programming Languages, pp. 439–493. Academic
Press.
Object Management Group (2007, November). OMG Uni-
fied Modeling Language (OMG UML), Superstruc-
ture, V2.1.2. http://www.omg.org/spec/UML/2.1.2/-
Superstructure/PDF/. Accessed 2008/03/15.
Soper, P. (2002). JSR 121: Application Isola-
tion API Specification. Java Specification Re-
quests. http://jcp.org/aboutJava/communityprocess/-
final/jsr121/index.html. Accessed 2008/03/15.
Strom, R. (1991). HERMES: A Language for Distributed
Computing. Prentice Hall.
Sutter, H. and J. Larus (2005, September). Software and the
concurrency revolution. ACM Queue 3(7), 54–62.
van Roy, P. and S. Haridi (2001). Concepts, Techniques,
and Models of Computer Programming. MIT Press.
ICSOFT 2008 - International Conference on Software and Data Technologies
54
