
Adaptive Sensing based on Fuzzy System for Wireless
Sensor Networks
*
Romeo Mark A. Mateo, Young-Seok Lee, Hyunho Yang
Sung-Hyun Ko and Jaewan Lee
School of Electronic and Information Engineering, Kunsan National University
68 Miryong-dong, Kunsan, Chonbuk 573-701, South Korea
Abstract. Wireless sensor networks (WSN) are used by various application
areas to implement smart data processing and ubiquitous system. In the recent
research of parking management system based on wireless sensor networks,
adaptive sensing of WSN is not considered where the effective implementation
of these distributed computing devices affects the performance of the over-all
reliability of the parking management system. This paper proposes an adaptive
sensing using the proposed fuzzy wireless sensor implemented in the ubiquitous
parking management system. The fuzzy inference system is encoded in the sen-
sor devices for efficient car presence detection. A rule base adaptive module is
used to change the fuzzy set values from wireless sensors based on the rules
specified by an expert. The prototype implementation of the proposed fuzzy
wireless sensors is done in a ubiquitous parking management system simulator.
1 Introduction
Wireless sensors have been popularly researched on the field of healthcare, military,
environmental monitoring and others [1]. These wireless sensor networks (WSN) are
characterized by low-cost, limited-power, small sized, specific or multiple functional
and wireless communicating device that smartly processes data and real-time infor-
mation. The concepts and techniques of WSN to solve the problems on diversity in
various applications are mostly studied by researchers. Most performance issues of
WSN rely on the protocols and architecture [2]. Communication protocols of WSN
are crucial on providing reliable information from source to destination. Efficiency in
energy consumption is also considered like implementing power-aware methods that
removes unnecessary links to provide longer time operations. It is also important to
consider adaptation of sensor reading based on changes of the physical environment.
Extreme conditions like having dramatic changes of weather in the area where sen-
sors are deployed can affect significantly the accuracy of sensor readings.
This paper proposes an adaptive sensing using the proposed fuzzy wireless sen-
sorfor the ubiquitous networks of parking management system. The proposed ubi-
quitous parking management system is consisted of three separate layers of hardware
* This research was financially supported by the Ministry of Education, Science Technology (MEST) and Korea Indus-
trial Technology Foundation (KOTEF) through the Human Resource Training Project for Regional Innovation.
Mark A. Mateo R., Lee Y., Yang H., Ko S. and Lee J. (2008).
Adaptive Sensing based on Fuzzy System for Wireless Sensor Networks*.
In Joint Proceedings of the 5th International Workshop on Ubiquitous Computing (IWUC 2008) 4th International Workshop on Model-Driven Enterprise
Information Systems (MDEIS 2008) 3rd International Workshop on Technologies for Context-Aware Business Process Management (TCoB 2008),
pages 3-11
DOI: 10.5220/0001739200030011
Copyright
c
SciTePress

and software components. This paper focuses on the efficiency of ubiquitous network
by using fuzzy wireless sensors. The proposed fuzzy wireless sensor is designed to
process the raw data of the sensor in the fuzzy inference system for efficient car pres-
ence detection. Moreover, a rule base adaptive module is proposed which transmit the
new values to each sensor for adapting the environment of parking area. The fuzzy
wireless sensor is implemented in the ubiquitous parking management system simula-
tor.
2 Related Works
Parking management system using WSN are popular studies of research. This method
implements WSN to sense the presence of the car and monitors the location of cars.
Relevant services like car locator system, parking negotiator and other ubiquitous
application in parking system rely on sensing procedure to provide the basic input
variable for parking system management. However, adaptive methods are needed to
be considered. The following subsections are related works basis on designing the
adaptive system of the fuzzy wireless sensor.
2.1 WSN-based Parking Management Systems
Current studies in smart parking system are efficient implementation of WSN. Wire-
less sensor networks are used for automatic vehicle car parking [3] where wireless
sensors and infrareds are used for the positioning to enhance the accuracy of position-
ing. The positioning and error correction procedures are calculated by the vehicles,
and forwarded to the server by WSN. A car parking monitoring system using WSN is
proposed [4]. Low-cost wireless sensors are deployed into a parking field which de-
tects and monitors the occupation of the parking lot area. The status of the parking
field detected by sensor nodes is reported periodically to a database via the deployed
wireless sensor network and its gateway. The database can be accessed by the upper
layer management system to perform various management functions, such as finding
vacant parking lots, auto-toll, security management, and statistic report. In [5], de-
scribe results of a simulation where reports from wireless sensor nodes are passed
from car-to-car in order to achieve scalable dissemination of information regarding
parking spaces. An analysis of link characteristics in the car-park scenario is studied
[6]. The experiments show unexpected reliability patterns which have a strong influ-
ence on MAC and routing protocol design. It concludes that the presence of the cars
being sensed can cause significant interference and degradation in communication
performance and link quality has a high temporal correlation but a low spatial correla-
tion. A comparison of data from different sensors for improvements to WSN in park-
ing management system is presented [7]. An RFID-based car parking system is pro-
posed which is improved by designing a middleware [8]. The design of the previous
researches does not include adaptive methods in the parking environments. Adaptive
design where variables from the environment are considered for adapting new confi-
guration in the sensor to read the inputs correctly is not considered.
4
2.2 Fuzzy Inference System
Fuzzy inference system is based on the concept of fuzzy logic and fuzzy sets, which was
conceived by Lotfi Zadeh [9]. It is presented as a way of processing data by allowing
partial set membership rather than crisp set membership or non-membership. Fuzzy logic
is one of the earliest concept using fuzzy sets where most fuzzy controllers benefit this
technique because of the it’s smooth transition to transfer the another fuzzy set and the
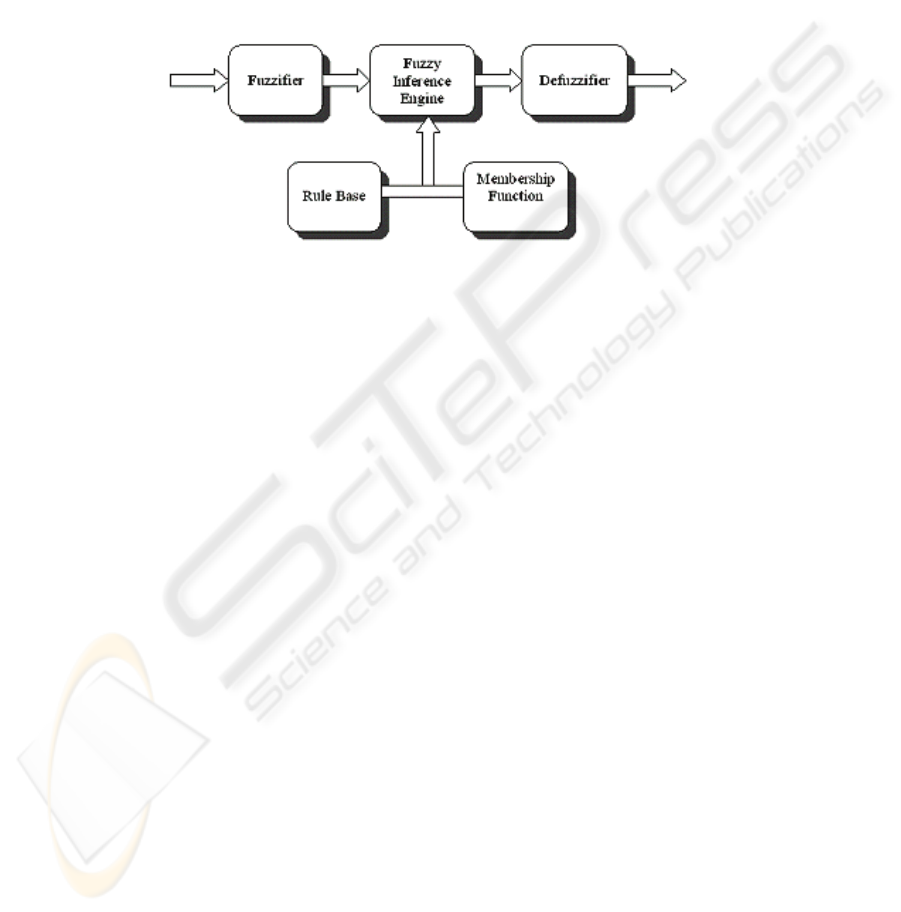
way it handles its imprecise values [10]. Figure 1 shows an example of a fuzzy inference
system.
Fig. 1. The component and procedure of fuzzy inference system.
A fuzzifier is an interface for the input where maps the numeric input to a fuzzy set
and it maps the premises of the fuzzy rules from the rule base. The fuzzy inference
engine applies the inference mechanism to the set of rules using the membership
function. Lastly, the crisp value is determined by the deffuzifier. The fuzzy inference
system in Figure 1 is efficient in classification of data in terms of speed. Non-linear
methods can be more accurate method but computational costly. The improvements in
accuracy of the fuzzy logic classifiers are recent studies nowadays to accurately clas-
sify variety of data. In this study, the FIS is used to classify input sensors like illu-
minance and temperature in detecting the car presence.
3 Fuzzy Wireless Sensors
This paper proposes the integration of fuzzy system in the sensing module of a wire-
less sensor device and called fuzzy wireless sensors. The application which the pro-
posed fuzzy wireless sensor is implemented is the WSN-based parking management
system. The architecture of the proposed ubiquitous parking management system is
shown in Figure 2. The architecture consists of three layers: ubiquitous network,
middleware and application services layers. In the ubiquitous network, represents the
physical networks of different sensor devices and computers communicating in the
wireless environment. The components in the middleware layer are transparently
executing for the efficiency on managing data from the ubiquitous network layer. The
previous study uses the hybrid-middleware which uses a peer-to-peer technique [8]
while it is currently improved by proposing a multi-agent system communication
5
model for the middleware for efficient interaction and serves efficiently the ubiquit-
ous network and application services and will be presented in a different paper. Inte-
raction of clients and application services are handled by the middleware layer. Users
and administrators do not need to know the configuration on how to find, where to
find and how to manage the resources but transparently executes the services. The
application service layer is consisted of services for ubiquitous parking management
system. The efficiency of the ubiquitous network relies on the reliable communication
and well-designed distribution of tasks of the devices in wireless environment.
Ubiquitous Networks
Car Active RFID and Wireless Sensor Network Protocol
Middleware
Multi-Agent System
Parking Application Services
Parking management, car locator system, parking payment service
Fig. 2. Framework for the ubiquitous parking management system consisting of three layers;
application services, middleware and ubiquitous network
3.1 Rule Base Adaptive Module of FWS
Wireless sensor devices are used for the car presence detection. A sensor module is
consisted of several sensors like light, temperature and humidity to process in the
fuzzy inference system (FIS). The fuzzy set concept was conceived by Lotfi Zadeh is
mostly used by intelligent controllers because the way it handles imprecise values and
smooth transition of changing fuzzy values. The FIS is composed of fuzzifier, fuzzy
rules and defuzzifier. Fuzzifier is an interface for the input where maps the numeric
input to the fuzzy sets and fuzzy rules. FIS applies the inference mechanism to the set
of rules using the membership function. Lastly, the crisp value is determined by de-
fuzzifying method. This paper proposes the fuzzy wireless sensor where the FIS is
encoded inside the module of the wireless sensors device shown in Figure 3. The
inputs of a single sensor module are processed by FIS and send the output value to
sink node. The FIS of the proposed fuzzy wireless sensor adapts the rules from adap-
tive rule base module in the sink node. Aside from the sensor that detects car presence,
there are additional sensors assigned to sense the changes in the environment of car
parking area. The inputs from these sensors are processed on the adaptive rule base
module to change the FIS value of each fuzzy wireless sensor. Rules from the module
are configured by expert base on the parking environment where weather conditions
that can affect the sensor readings are considered.
6
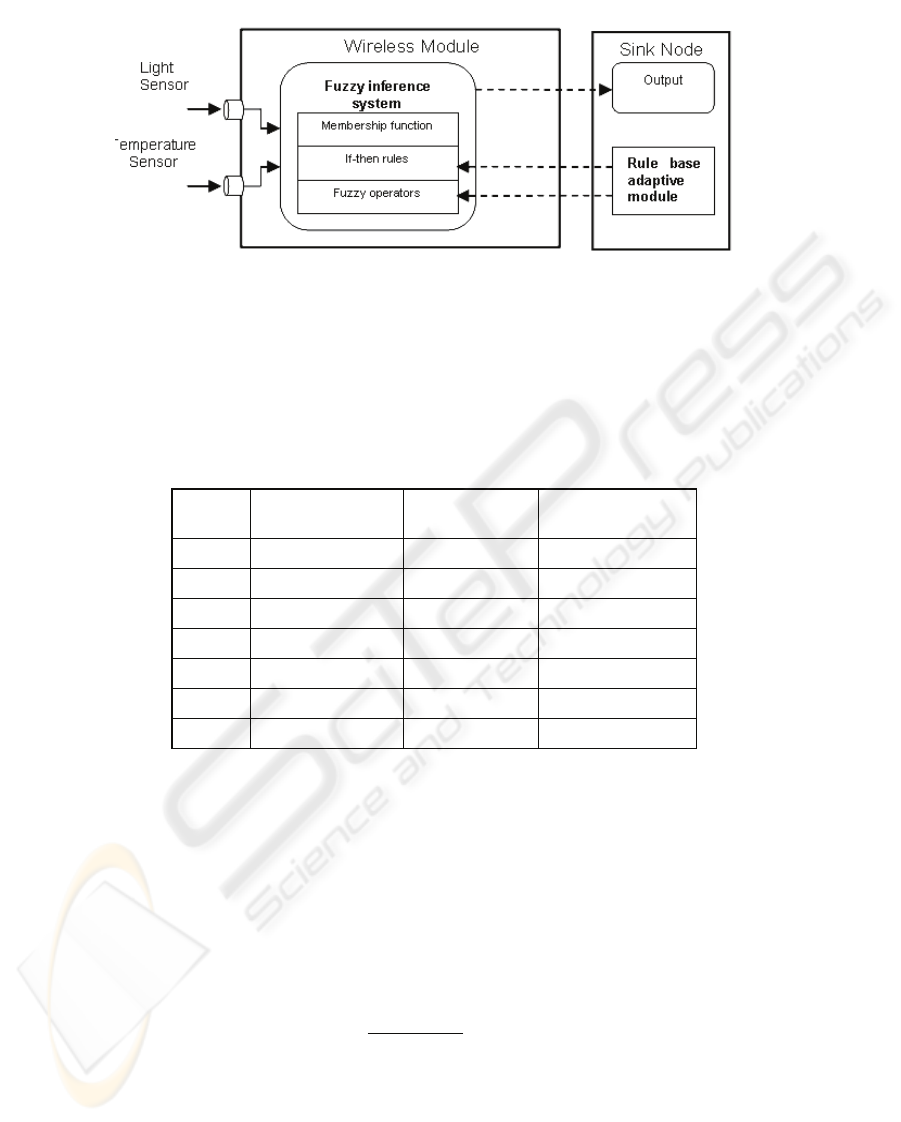
Fig. 3. The proposed fuzzy wireless sensor consists of fuzzy inference module.
Procedure of the FIS. This research uses the sensor inputs (S
i
) in a single module to
process in the FIS. The S
i
, refers to sensor input value, where i is the index of the
input. The values gathered at the same time, t
n
={ S
1
, S
2
,…, S
i
}, and processed in the
FIS to determine the presence of the car represents as c. Two input parameters are
defined for the fuzzy rules of the FIS shown in Table 1.
Table 1. Fuzzy rules used in the proposed fuzzy wireless sensor.
Rule Temperature (S
1
) Luminance (S
2
) Car Presence (C)
1 Low Dark Not present
2 Medium Dark Not present
3 Low Medium-bright Not present
4 Medium Medium-bright Present
5 High Medium-bright Present
6 Medium Bright Present
7 High Bright Present
The S
1
and S
2
both have three linguistic values while the candidate has two linguistic
values. The presence of the car is determined by processing the S
1
and S
2
in the FIS
and then the value of the center of gravity, c
i
, is determined to decide the state of the
car presence. The car presence function, CarPresence(c
i
), is consist of input variables,
input(c
i
), state(present, absent), boundary(0.5), and returns the state. Equation 1
shows the conjunction of two variables process in minimum function used for map-
ping the rules in Table 1. Equation 2 calculates the deffuzzified value of a rule and
Equation 3 presents the boundary condition to decide the state.
)}(),(min{)( xxx
BABAj
μ
μ
μ
μ
=
=
∧
(1)
∑
∑
=
⋅
=
r
j
j
j
r
j
j
i
s
c
μ
μ
1
(2)
7

⎩
⎨
⎧
>
<
=
boundarycifabsent
boundarycifpresent
cf
i
i
i
,
)(
(3)
Adaptation of FIS. Extreme conditions in the car parking area could vary the values
of the sensor readings. In this paper, an adaptive module for the proposed fuzzy sen-
sors is implemented to adjust the values in the FIS. Fuzzy values are reconfigured
based on the rules from the adaptive module of the sink node shown in Figure 3. The
new configuration of the FIS correctly processes the inputs. Rules are defined by
expert based on the conditions of the car parking where R={R
1
, R
2
,…, R
k
}.
kkkk
thenAisSANDANDAisSIFR Σ= ,...,
11
(4)
The outcome of the rule in Equation 4 (Σ) consists of fuzzy sets center value (
σ
l
) and
expressed by Σ={
σ
1
,
σ
2
,…,
σ
l
}. These values are sent in wireless transmission me-
thod. Each center value is used to calculate the fuzzy sets shown in Equation 5. The x
is the index and, A, B, C are the minimum, center and maximum values of fuzzy set x,
respectively. The procedure of Equation 5 is done in the proposed fuzzy wireless
sensor.
;
,
;
,1
;
1
max
1
min
⎩
⎨
⎧
=
=
⎩
⎨
⎧
=
=
=
+
−
else
indexlastxifC
C
else
xifC
A
B
x
x
x
x
xx
σ
σ
σ
(5)
4 Implementation in UPMS
Our design of the ubiquitous parking management system (UPMS) uses wireless
sensor motes which is a 2.4 GHz IEEE 802.15.4 compliant RF transceiver. The pri-
mary model of WSN uses a flooding technique and focuses on the adaptive sensing
function. The proposed fuzzy wireless sensor and rule base adaptive module is im-
plemented in the ubiquitous parking system simulator. The FIS of the fuzzy sensor is
coded and designed in nesC, which is a programming language for wireless sensors,
and the rule-base adaptive module is programmed in Java. This paper focused on the
flexibility of the program to interact with other program and is the main reason of
using Java.
8
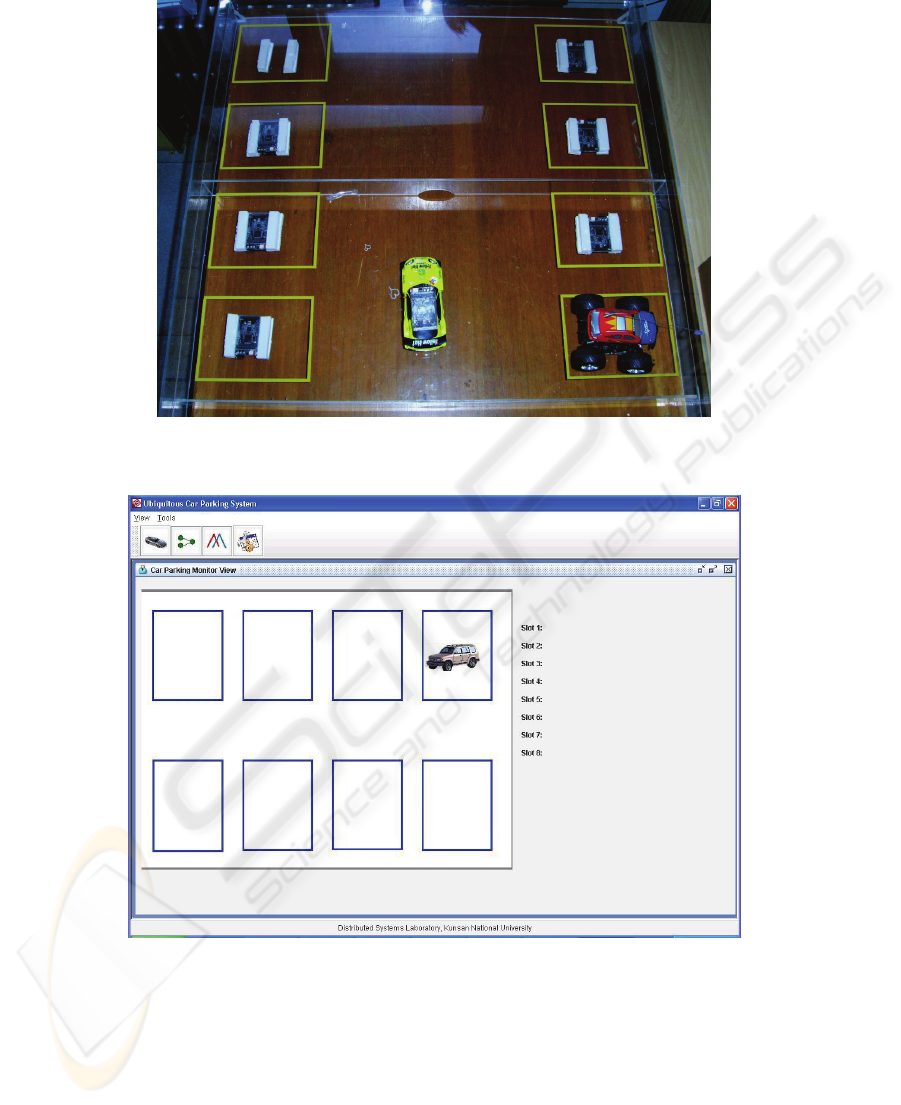
Fig. 4. The ubiquitous parking management system simulator with wireless sensors nodes and
car model.
Fig. 5. The parking program simulator displays the output from the platform.
The interaction of the parking simulator is presented in Figure 4 and 5. In Figure 4, a
car parked in a slot and is detected by the fuzzy wireless sensor under the slot. The
values from sensor reading are processed in the FIS of the proposed fuzzy wireless
sensor. The car parking platform is consisted of 8 slots embedded with wireless sen-
9
sors. A sink node is used in communicating with the wireless sensors and gathering of
the data from sensor readings. In Figure 5 is an output display from the car parking
platform. The output value from fuzzy wireless sensor is sent directly to the sink node.
The output display is updated every second and the values are stored in the database.
Also, the rule base adaptive module is executing at the same.
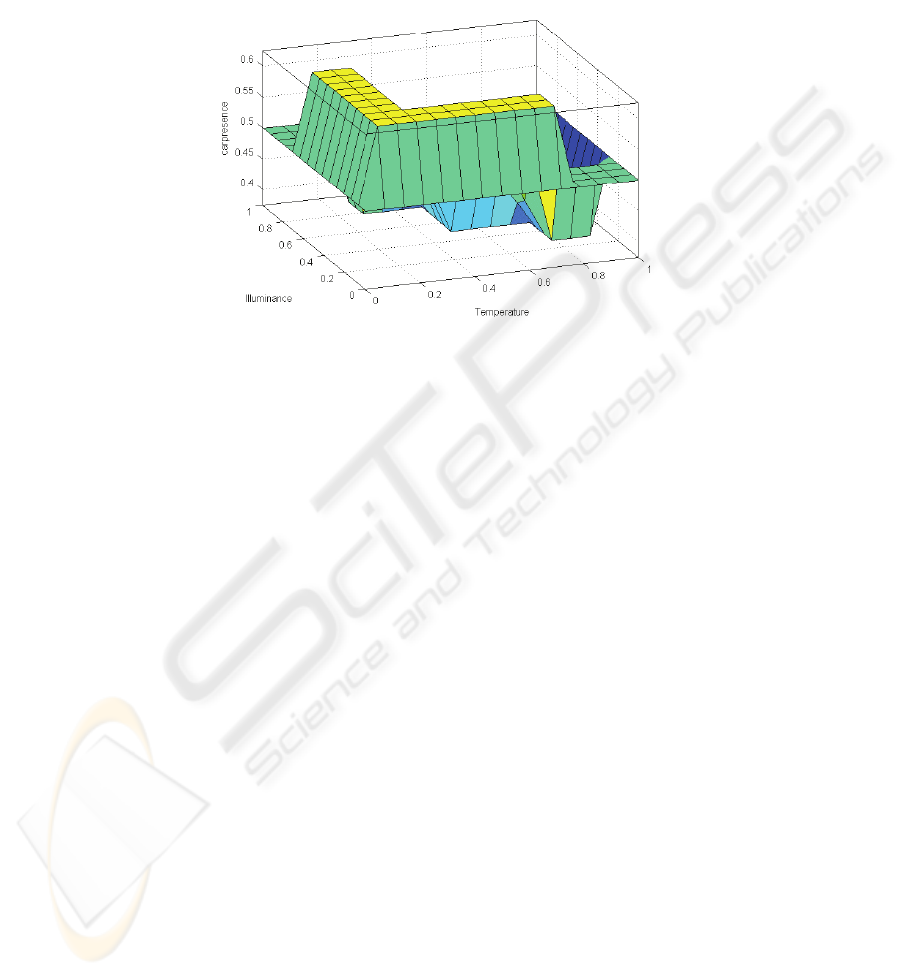
Fig. 6. The graphical presentation of membership function transitions for the illuminance and
temperature to detect the car presence.
The fuzzy system from wireless sensors classifies the input from sensors and in Fig-
ure 6 presents the transition of membership values to classify the car presence based
on illuminance and temperature. Our approach is scalable and classifies more input
values compared to other research like using magnet sensors [6] which only used one
sensor to detect car presence. It is also possible to use non-linear system to solve the
classification problem on car presence detection but computational costly to perform
in sensor devices. This also means using more input sensors obtains accurate readings
from sensors. Moreover the adaptive module is design to adjust the readings and
provide new pattern of detecting the presence of car.
5 Conclusions and Future Works
This paper proposes the adaptive sensing using fuzzy wireless sensor to implement
the efficient ubiquitous networks in the parking management system. The proposed
fuzzy wireless sensor is designed to process the raw data of the sensor using fuzzy
inference system for efficient car presence detection. Moreover, an adaptive module
is presented to adapt on new rules set by an expert. The proposed fuzzy wireless sen-
sor is implemented in the ubiquitous parking management system simulator.
The future work will be defining the functions of application services and middleware
components of the UPMS. Improvements on communication protocols for the fuzzy
wireless sensor will be considered and also, additional ubiquitous devices needed to
be implemented are the next topic.
10

References
1. Arampatzis, T., Lygeros, J., Manesis, S.: A Survey of Applications of Wireless Sensors and
Wireless Sensor Networks. In IEEE International Symposium on Intelligent Control
(2005) 719-724
2. Karl, H., Willig, A.: Protocols and architectures for wireless sensor networks. John Wiley
& Sons Ltd. (2005) 231-288
3. Chou, L., Sheu, D.C.C., Chen, H.W.: Design and Prototype Implementation of a Novel
Automatic Vehicle Parking System. International Journal of Smart Home, Vol. 1, No. 1
(2007) 11-16
4. Tang, V. W. S., Zheng, Y., Cao, J.: An Intelligent Car Park Management System based on
Wireless Sensor Networks. In 1st International Symposium on Pervasive Computing and
Applications (2006) 65-70
5. Miura, S., Zhan, Y., Kuroda, T.: Evaluation of Parking Search using Sensor Network. In
1st International Symposium on Wireless Pervasive Computing (2006) 6
6. Benson, J. P., O’Donovan, T., O’Sullivan, P., Roedig, U., Sreenan, C.: Car Park Manage-
ment using Wireless Sensors Networks. In 31st IEEE Conference on Local Computers
(2007) 588-595
7. Kumar, R., Chilamkurti, N.K., Soh, B.: A Comparative Study of Different Sensors for
Smart Car Park Management. In the International Conference on Intelligent Pervasive
Computing (2007) 499-502
8. Cervantes, L. F., Lee, Y. S., Yang, H., Lee, J.: A Hybrid Middleware for RFID-based
Parking Management System using Group Communication in Overlay Networks. In the In-
ternational Conference on Intelligent Pervasive Computing (2007) 521-526
9. Zadeh, L. A.: Fuzzy sets. Information and Control (1965) 338-353.
10. Zilouchian, Jamshidi, M.: Intelligent Control System using Soft Computing Methodologies,
Wiley (2007) 187-210
11
