
Location Technique based on Pattern Recognition of
Radio Signal Strength using Active RFID
Romeo Mark A. Mateo, Insook Yoon and Jaewan Lee
School of Electronic and Information Engineering, Kunsan National University
68 Miryong-dong, Kunsan, Chonbuk 573-701, South Korea
Abstract. RFID technology is used by various application areas to implement
smart data processing and ubiquitous system. In the recent research of parking
system, implementing efficient and accurate location technique using active
RFIDs are not considered. This paper proposes a location technique based on
pattern recognition of radio signal strength using active RFID. Active RFID is
used by cars for identification by sending signals to receiving sensors. The pro-
posed pattern recognition based on multilayer perceptron (MLP) uses the pat-
tern of radio signal to process accurate location technique. The procedure pro-
vides a training model for received signal strength (RSS) patterns in able to
classify the signals and determine the exact slot. A parking simulator platform
is used and compared the proposed method to other algorithms and found that
MLP is more accurate classifier and faster in building the classification model.
1 Introduction
The current research studies in parking management system have realized the useful-
ness of ubiquitous technologies to automate car monitoring and provide smart
processing of information in wireless environment. Most researches implement wire-
less sensor devices in sensing presence of car and monitoring location of cars [1, 2].
Relevant services in parking system like locator system for parked cars rely on moni-
tored events and updated databases for data retrieval. However, issues of integrating
radio frequency identification (RFID) with the wireless sensor networks (WSN) are
not well studied. An example of integration issue is how to associate sensor devices
to identification of cars (RFID tags) where the system can detect the presence of the
car by WSN but cannot tell exactly the identification of car that parked on the slot [3].
This can be solved by location techniques using active signals [4] with the WSN’s
interactions. However, the interaction of the WSN and RFID must be efficiently de-
signed.
1
Positioning techniques are important for monitoring the position of a mobile object.
There are varieties of positioning techniques like global positioning system [5] which
have accurate method of locating mobile or immobile objects. The GPS technology
* This research was financially supported by the Ministry of Education, Science Technology (MEST) and
Korea Industrial Technology Foundation (KOTEF) through the Human Resource Training Project for
Regional Innovation.
Mark A. Mateo R., Yoon I. and Lee J. (2008).
Location Technique based on Pattern Recognition of Radio Signal Strength using Active RFID.
In Proceedings of the 2nd International Workshop on RFID Technology - Concepts, Applications, Challenges, pages 7-18
DOI: 10.5220/0001722800070018
Copyright
c
SciTePress

is limited on outdoor measurements of objects and not indoors. In this case, a location
technique that can be used inside buildings is necessary. Some techniques like time of
arrival (TOA), angle of arrival (AOA), and received signal strength (RSS) are used in
indoors. Both TOA and AOA are more complex and costly compare to RSS. RSS is
simple because it only needs to measure signal strength from the source and then
calculate the position based on multilateration [6]. These do not require complex
design and additional hardware. Active signals [7] are currently used for location
system.
This paper proposes a location technique based on pattern recognition of radio sig-
nals applied in the ubiquitous parking management system (UPMS) by locating the
specific parking slot using active RFID. The UPMS is consisted of a car active RFID
(CARFID), wireless sensor modules and an access point computer with the pattern
recognizer agent that interact in implementing automated and efficient parking system.
A CARFID is used to send signal to sensor nodes in the parking area. The pattern
recognizer agent (PRA), based on multilayer perceptron, trains the received signal
strength from CARFID. After the training, the system classifies the location of the car
using the current input RSS from the CARFID. The proposed method is implemented
in the parking system simulator. The result of experiments shows that using the PRA
acquires accurate location technique by correct classification of current radio signals.
2 Related Works
2.1 Automated Parking Systems
The current contributions of studies in parking system are providing smart monitoring
by using WSN. Wireless sensor devices are used for automatic vehicle car parking [8]
where wireless sensors and infrareds are used for the positioning to enhance the accu-
racy of positioning. A parking monitoring system using WSN is proposed [9]. The
status of the parking field detected by sensor nodes is reported periodically to a data-
base via the deployed wireless sensor network and its gateway. The database can be
accessed by the upper layer management system to perform various management
functions, such as finding vacant parking lots, auto-toll, security management, and
statistic report. In [2], describes a simulation where reports from wireless sensor
nodes are passed from car-to-car in order to achieve scalable dissemination of infor-
mation regarding parking spaces. An analysis of link characteristics in the car-park
scenario is studied [1]. The experiments shows unexpected reliability patterns which
have a strong influence on MAC and routing protocol design. It concludes that the
presence of the cars being sensed can cause significant interference and degradation
in communication performance and link quality has a high temporal correlation but a
low spatial correlation. A comparison of data from different sensors for improve-
ments to WSN in car parking system is presented [10]. An RFID-based car parking
system is proposed which is improved by designing a middleware [3]. Using RFID
technology to identify each car entering the parking area is also useful information
and consideration by researches. However, the issue of simultaneous parking of cars
and associate the identification to the correct slot location is not discussed by the
8

previous researches. The previous system can only detect the car presence by WSN to
monitor free spaces but cannot tell exactly the identification of car if other cars are
within the range of the RFID reader. There are alternative methods like assigning cars
on a specific slot before entering the parking area but one of the draw backs is that a
car owner cannot choose the parking slot he liked. This can be solved by location
techniques using active signals with the help of WSN’s interaction.
2.2 Location Technique based on Received Signal Strength
There are lots of localization and positioning methods that uses active signals. Active
badge location system [4] is the first location system designed and built for simple,
portable devices within buildings. It uses infrared as transmission medium and ex-
ploits the natural limitation of infrared waves by walls as delimiter for its location
granularity. An ultrasound-based location system [11] is used to send ultrasound to
the receivers. Moreover, properties of these methods are also needed to be consi-
dered. In the proposed method, the location technique uses received signal strengths
(RSS). The calculation is presented in Equation 1, where P
tx
is the transmission pow-
er,
α
is the path loss model, P
rcvd
is the signal strength is used to solve the r or dis-
tance.
rcd
txtx
rcd
P
cP
r
r
cP
cP
α
α
== ,
(1)
The distance value from Equation 1 is used in location estimation procedure in cal-
culating the lateration of the node that send the signal where at least three receiver
nodes are needed. Pattern recognition of signal also provides a convenient way of
implementing the location schemes which doesn’t need sophisticated devices
[12]. A
study using nearest neighbour technique, statistical approach for signal pattern recog-
nition are proposed
[13]. Assume that RSS in any training location (x
i
, y
i
) is a random
variable p with a density function f [p/( x
i
, y
i
)] drawn from the samples of measure-
ments performed at that location. Then, for a new measurement, RSS=P at an un-
known location (x, y), the probability of having that measurement taken in the specif-
ic training points (x
i
, y
i
) is in Equation 2. The actual estimate of the unknown location
(x
i
, y
i
) is the statistical average over all measured training locations in Equation 3
)],/([
iii
yxpfp
=
(2)
∑
=
=
N
i
iii
yxpyx
1
),(),(
(3)
It is proved that statistical approaches are more accurate than the nearest neighbor
approach. However, most of statistical methods are computation costly and because
of the unknown path loss model from RSS, it is not assured that accuracy of the mod-
el is achieved. Approaches using non-linear methods like neural-networks can be
efficient and convenient in pattern recognition of signals. This approach uses the
power of learning from training patterns and does not need sophisticated computation.
9
3 Framework of the Ubiquitous Parking Management System
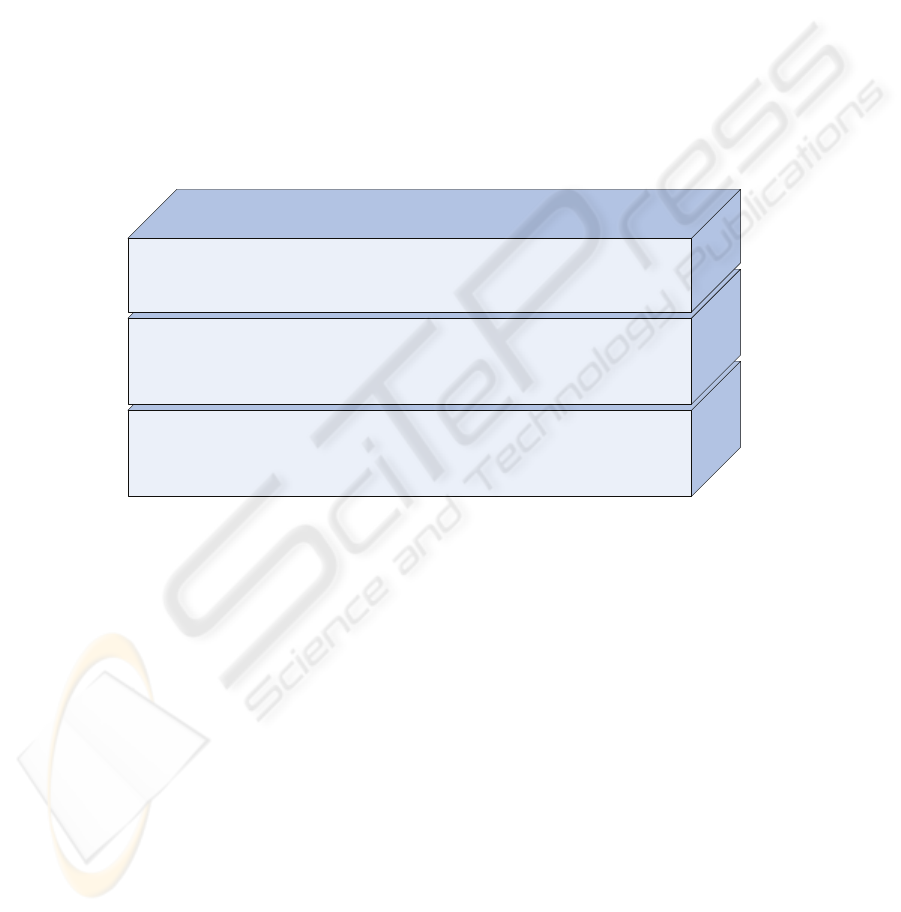
The architecture of the proposed ubiquitous parking management system is shown in
Figure 1. The architecture consists of three layers: ubiquitous network, middleware
and application services layers. In the ubiquitous network, represents the physical
networks of different sensor devices and computers communicating in the wireless
environment. The components in the middleware layer are transparently executing for
the efficiency on managing data from the ubiquitous network layer. Interaction of
clients and application services are also handled by the middleware layer. Users and
administrators do not need to know the configuration on how to find, where to find
and how to manage the resources but transparently executes the services. The applica-
tion service layer is consisted of services for parking management system. This paper
proposes a location technique in the ubiquitous network layers of the parking man-
agement system. The efficiency of the ubiquitous network relies on the reliable com-
munication and well-designed distribution of tasks in wireless environment.
Ubiquitous Networks
Car Active RFID and Wireless Sensor Networks
Middleware
Multi-Agent Communication
Application Services
Parking management, car locator system, payment system
Fig. 1. Framework for the ubiquitous parking management system consisting of three layers;
application services, middleware and ubiquitous network.
The proposed framework uses multi-agent approach to provide an intelligent dis-
tribution of task within the system. The pattern recognizer agent (PRA) is the focused
of this paper. Also, a car monitoring agent that monitors cars parked which interacts
with RRA. This paper focuses on improving the functions of the ubiquitous network
layer by proposing a location technique using signal pattern recognition method.
Unlike other location method, the proposed design is not complex and cost-effective
by only using wireless sensors to locate the object.
4 Signal Pattern Recognition based on Multilayer Perceptron
A car is assigned with an active RFID. Every time a car parked, the active RFID
sends data to all wireless sensors in the parking area. The sending of message occurs
10
until a period of time. Each wireless sensor determines the received signal strength
(RSS) from the active RFID and then sends the value to the sink node. In this propos-
al, RSSs are used for the recognition method from the trained structured of the neural
networks.
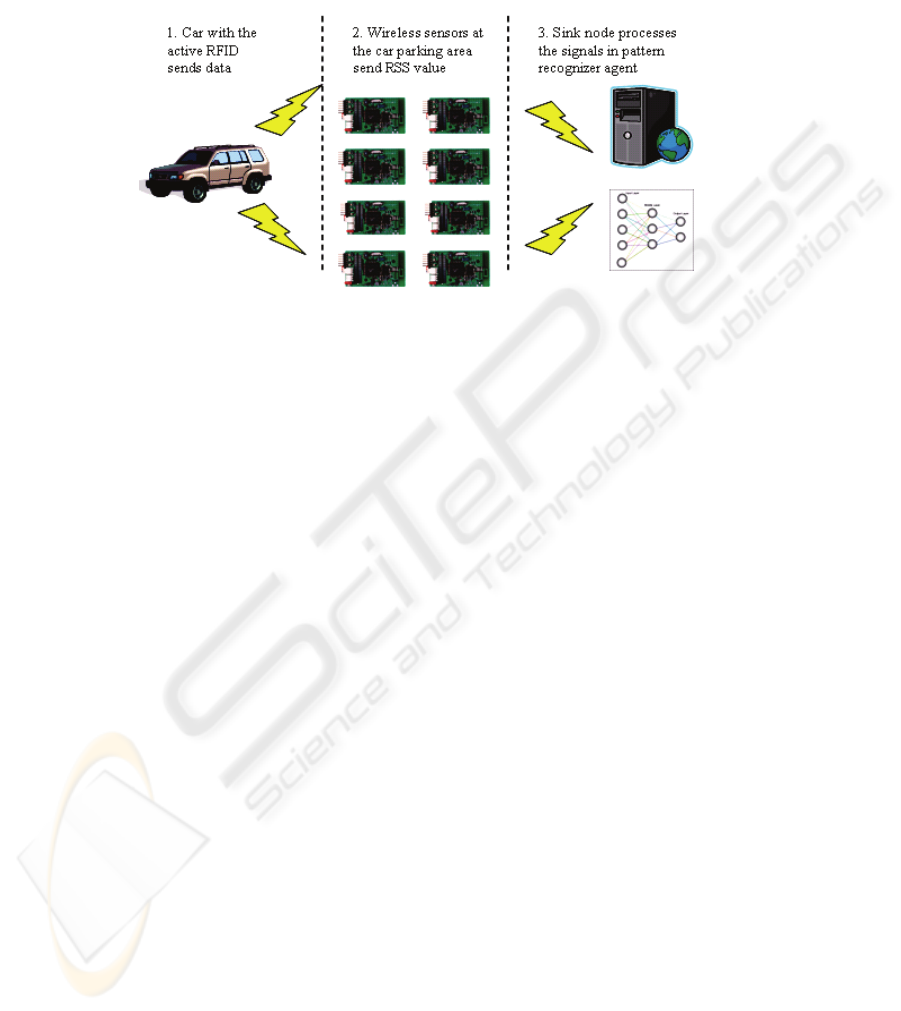
Fig. 2. The procedure of gathering and processing the received signal strength (RSS).
The proposed pattern recognizer agent in the sink node gathers all RSSs and de-
termines the slot location of the car. Figure 2 shows the procedure of gathering the
RSS to each wireless sensor; (1) sending the data by the active RFID; (2) each wire-
less sensor determines RSS from the active RFID then send to the sink node; and (3)
processing the RSSs to the pattern recognizer agent based on MLP.
4.1 Training MLP with RSS Pattern
Each RSS pattern is used for the training of multilayer perceptron (MLP) of the pro-
posed pattern recognizer agent. MLP is consisted of three layers of processing nodes
an input layer which accepts the input variables used in the classification procedure,
one hidden layers, and an output layer with one node per class. Equation 4 shows the
over all calculation of the MLP. RSS data are presented as input x and weight value
of the connection as w. The z
k
refers to the output is value from calculating the activa-
tion function from input to hidden and hidden to output nodes.
))((
1
0
1
0
∑∑
=
=
++=
nH
j
k
d
i
jijikjk
wwxwfwfz
(4)
The back-propagation algorithm is a gradient descent optimization procedure
which minimizes the mean square error between the network's output and the desired
output for all input patterns P. The outputs are compared to the target values and
determine the differences. The error is minimized by a function when the network
output match the desired outputs where the weights are changed. The least mean
square (LMS) for two layer nets is shown in Equation 5, where t and z are the target
and the network output vectors of length c and w represents all the weights in the
network.
11
2
1
||||
2
1
2)(
2
1
)( ztztwJ
c
k
kk
−=−=
∑
=
(5)
4.2 Managing Misclassified Patterns
After the training, the structure of the MLP is used to recognize the pattern of signals
to detect the car identification and verifies the location of the car. First, the RSS pat-
terns from the new arrived car are processed at the MLP and produce the output. The
output is compared to the WSN which detects the presence of the car. If the output
and the WSN ID is the same then it reports to the monitoring program the location of
the car. Else if it not the same, the input patterns are again processed in the training.
4.3 WSN and RFID Interaction
The interaction of the wireless sensors, car active RFID (CARFID), car monitoring
agent and the pattern recognizer agent (PRA) is designed to implement the efficient
ubiquitous network of parking management system. The car monitoring agent is used
by other application services which are dependent on the function of the PRA. The
WSN and CARFID interaction is implemented to acquire efficient car presence detec-
tion by processing the inputs in wireless sensors and accurate car location based on
RSS pattern recognition of the proposed PRA.
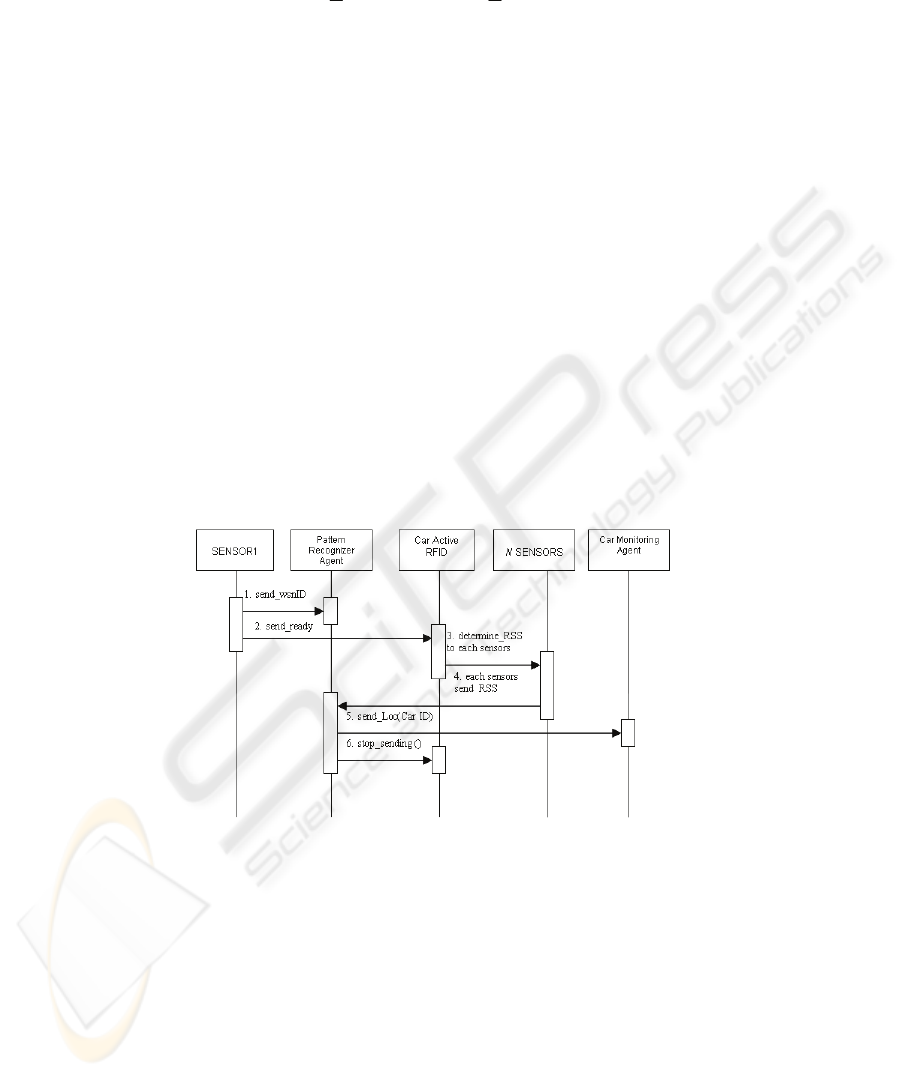
Fig. 3. The Event Trace Diagram (ETD) of the CARFID and WSN Interactions.
The procedures of the CARFID and WSN interaction on the Event Trace Diagram in
Figure 3 are explained in the following:
1. The wireless sensors processes the input values to determine the car presence.
This procedure sends the address of the slot location (send_wsnID) where pres-
ence of the car was detected to the PRA to be used in RSS pattern classification
in step 4.
2. After the sensor detects the presence of the car, it sends message send_ready to
12

the CARFID to initialize the sending message of CARFID to all sensors.
3. The CARFID start sending determine_RSS to each sensor in the parking area and
the sensors determine the received signal strength.
4. After each sensor determines the RSS by receiving the message of CARFID, it
sends the RSS values to the PRA.
5. The RSS values that were sent by sensors are processed in the MLP of PRA.
After the output is determined then the current signal pattern is associated with
the slot location of the car and then informs the car monitoring agent by the
command send_Loc(CarID).
6. The PRA sends a stop message to the CARFID.
The proposed interaction considers the reliable communication within the wireless
environment. The misclassification of the PRA is managed by processing again the
RSS patterns on the MLP.
5 Implementation and Evaluation
5.1 Implementation in UPMS
Our design of the ubiquitous parking management system (UPMS) used wireless
sensor motes which is a 2.4 GHz IEEE 802.15.4 compliant RF transceiver. The active
RFID is put on the top of the car model shown in Figure 4. Every time the wireless
sensor detects the presence of the car, it sends a message to the active RFID.
Fig. 4. The active RFID is placed on the top of the car model.
The proposed location technique based on pattern recognition of RSS is imple-
mented in the ubiquitous parking management system simulator. The program for the
active RFID is coded and designed in nesC, which a programming for sensors, and
the pattern recognizer agent based on MLP is programmed in Java. Each ID is en-
coded in a wireless sensor mote to simulate the active RFID.
13
(a) (b)
Fig. 5. The front side (a) and back side without cover (b) of the CARFID.
The CARFID prototype is shown in Figure 5. The area of the CARFID is 8.5 cm
by 5.5 cm which is equal to the size of an ATM card and the thickness is about 1 cm.
We used the same frequency of the wireless sensor motes to the CARFID. In Figure
5a, CARFID has a command button to represent other functions like automated open-
ing doors at the entrance of parking lot. Figure 5b shows the hardware inside of
CARFID. It is provided with a small sized battery and like wireless sensor, the com-
mands and interaction are programmed in nesC. CARFID is used for the proposed
location technique based on pattern recognition of RSS. The program of the CARFID,
to interact with the wireless sensors is coded and designed in nesC as well as the
wireless sensors. PRA which is used to receive and process the RSS is programmed
in Java. The IDs of each wireless sensor which is for the slot location and CARFID
which is for the car identification were included in the program.
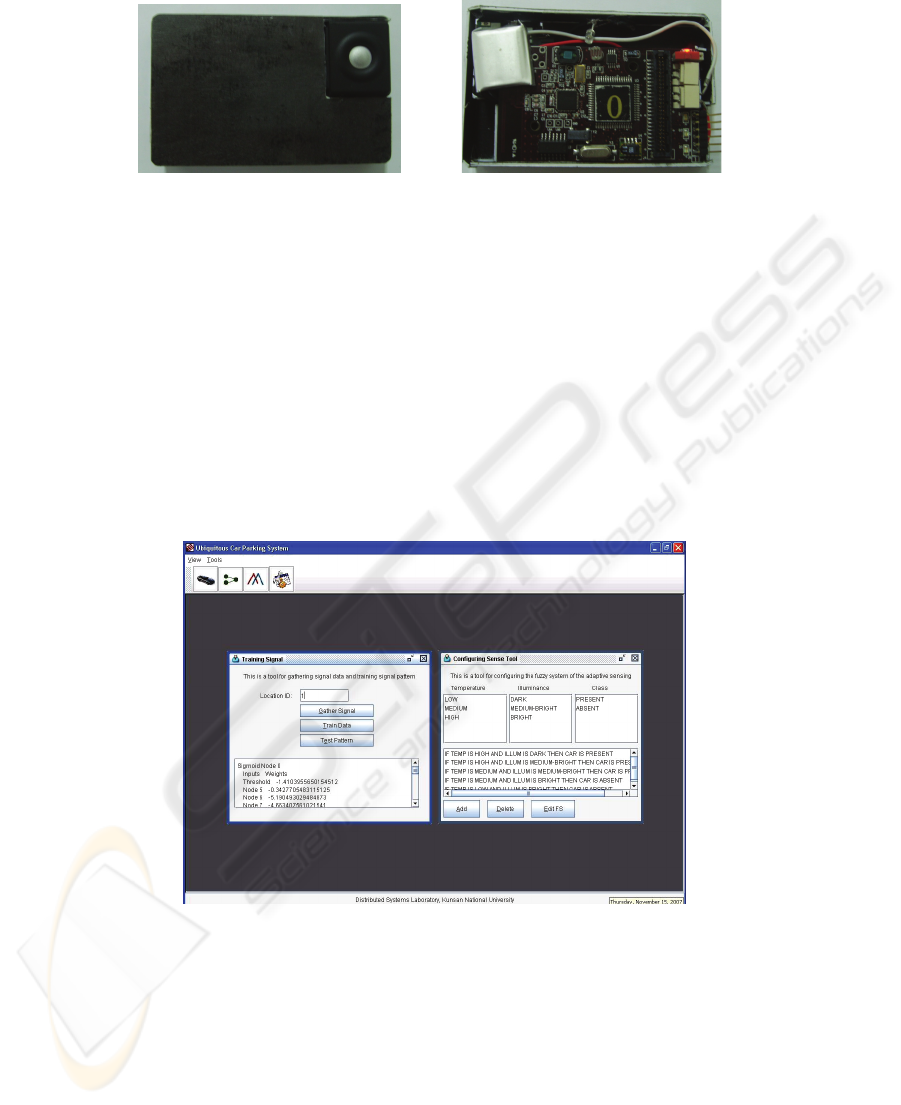
Fig. 6. The configuration of MLP training and wireless sensors are performed in the GUI pro-
gram of ubiquitous parking management system.
Figure 6 presents the configuration of the training of RSS patterns in MLP and
wireless sensors. A GUI program is developed to do these tasks and other services.
On the parent window, the child window for training the MLP is shown at the left of
Figure 6. The training of RSS is performed in three steps. First, gathering of RSS data
by performing the parking event. This procedure includes parking the car in each
14

parking slot and records the signals that are associated to the slot that is currently
occupied. After RSS patterns were gathered, all patterns were used to train the MLP.
The last step is a test of the trained MLP to classify the current RSS pattern.
Fig. 7. The ubiquitous parking management system simulator with wireless sensors nodes and
car model.
Fig. 8. The parking monitor program displays the output from the platform.
The interaction of the parking platform simulator is presented in Figure 7 and 8.
The area of the parking simulator platform is 2.4 x 0.1 m and placed at inside of an
office type room. Each slot area is 18 x 13 cm with a boundary of 3.5 cm between
each slot and drive way of 36 cm. The parking platform is consisted of 8 slots em-
bedded with wireless sensors. In Figure 7, a car parked in a single slot and at the same
15
time in Figure 8 shows the output display from the parking platform simulator. The
output display is updated every second and the values are stored in the database. Also
at the same time, the active RFID from the car model sends data to all sensors. Each
sensor determines the RSS from the active RFID and sends the values to the sink
node with the pattern recognizer agent. The PRA gathers RSS data and associates the
slot address where car presence is detected by the wireless sensor mote. After know-
ing the identification of the car, the information is stored in the database of the system.
5.2 Performance Evaluation
Several path loss models are considered in RSS location techniques
[12] and our si-
mulation environment considers the office space type. We used a maximum of 7
nodes for simulating the proposed location technique and a car model which is scaled
28 times smaller than the original size with the active RFID. In the simulation, each
RSS readings from the nodes are recorded and stored in the database whenever a car
is on the slot area. We selected 100 patterns containing five different locations classes
with the RSS signals where each location class contains 20 patterns. Most of the stu-
dies measure the distance error, however, this study focuses more on the pattern rec-
ognition of radio signal where the accuracy of classifying the pattern from the current
signals is observed. The cross-validation method is a popular classification test which
uses the same training data in determining the number of misclassified patterns and is
used for our evaluation. The nearest neighbor (NN) based on averaging the group of
patterns and logistic regression which is a statistical model for probability modeling
of patterns were compared.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
234567
Number of nodes
Classification accuracy
ML P
Logistic
NN
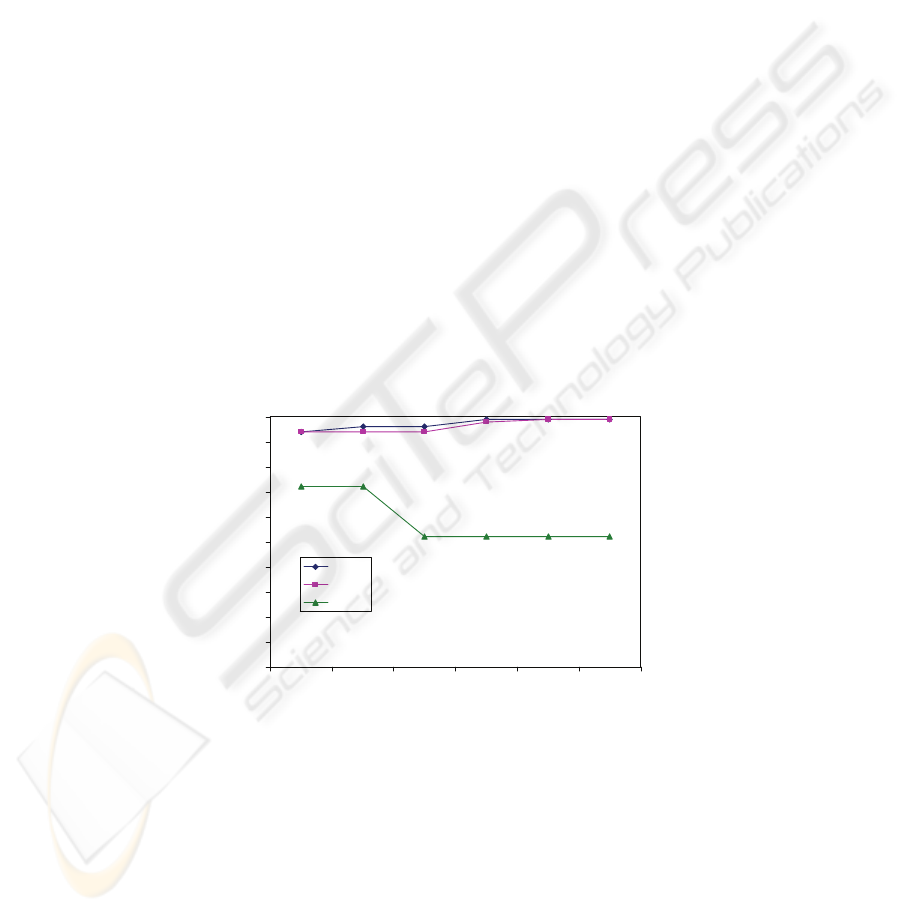
Fig. 9. Accuracy of the MLP, logistic and NN algorithms in classifying the patterns from RSS.
Figure 9 shows the MLP and logistics are more accurate in classifying the patterns
compared to NN. Also, by increasing the number of nodes, MLP and logistic classifi-
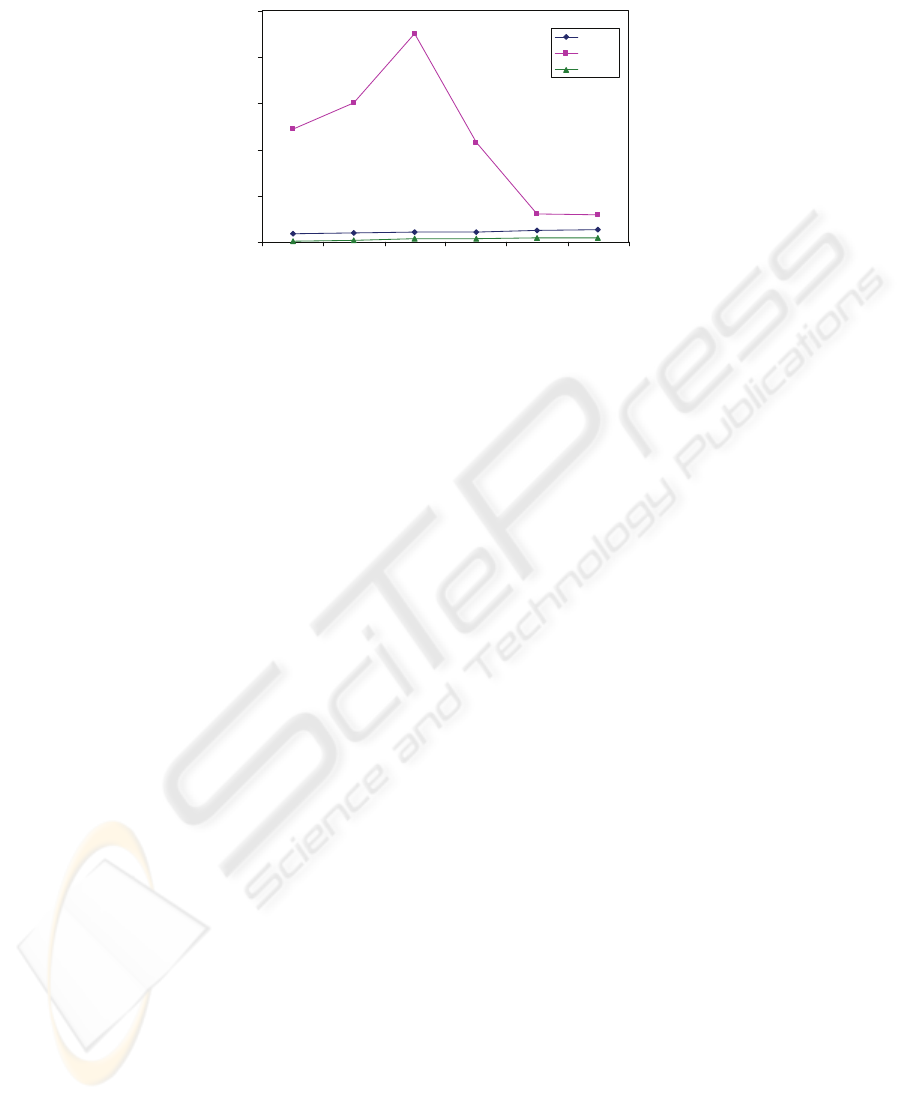
cation accuracy increases while the NN decreases. However, Figure 10 shows that
MLP is efficient in processing time compared to logistic. Building the statistical mod-
el of logistic is computational costly and by adding another node between 2 to 6 in
16
0
5
10
15
20
25
234567
Number of nodes
Processing time in seconds
ML P
Logistic
NN
Fig. 10. Processing time to build the model of the MLP, logistic and NN algorithms.
creases the calculation time. MLP shows more efficient in time processing and
adding a node has a minimal time processing. Even though MLP is not faster than NN,
it has a big difference on the accuracy in Figure 9. In overall, the pattern recognizer
agent has an average of 97% of accuracy which is more accurate in classifying RSS
patterns and time efficient compared to nearest neighbor and logistic regression, re-
spectively.
6 Conclusions
The use of active RFID provides flexibility to application in wireless environment. More-
over, the main challenges in wireless and mobile environments are to considered effective
and cost-efficient location technique to implement in the system. This paper proposes a
location technique based on pattern recognition of radio signals for the ubiquitous parking
management system.
To accurately locate the slot location of the car by using the re-
ceived signal strength (RSS) from each sensor, the pattern recognizer agent (PRA),
based on multilayer perceptron, is proposed. The proposed method is implemented in
the ubiquitous parking management system simulator. The result of experiments
showed that using the PRA acquires accurate classification of current signals to locate
the slot of the car.
The future work will be the integration of the application services and middleware
of the proposed framework for ubiquitous parking management system. Moreover,
the proposed method will be configured and simulated in the real environment of the
parking management system.
References
1. Benson, J. P., O’Donovan, T., O’Sullivan, P., Roedig, U., Sreenan, C.: Car Park Manage-
ment using Wireless Sensors. In 31st IEEE Conference on Local Computer Networks
(2006) 588-595
17

2. Miura, S., Zhan, Y., Kuroda, T.: Evaluation of Parking Search using Sensor Network. In
1st International Symposium on Wireless Pervasive Computing, (2006) 6
3. Cervantes, L. F., Lee, Y. S., Yang, H., Lee, J.: A Hybrid Middleware for RFID-based
Parking Management System using Group Communication in Overlay Networks. In Inter-
national Conference on Intelligent Pervasive Computing (2007) 521-526
4. Want, R., Hopper, A., Falao, V., Gibbons, J.: The Active Badge Location System. ACM
transactions on information systems, 10 (1) (1992) 91-102
5. Hoffmann-Wellenhof, B., Lichtenegger H., Collins, J.: Global Positioning Systems, Theory
and Practice. Springer-verlag, 5th Ed (2001)
6. Karl, H., Willig, A.: Protocols and Architectures for Wireless Sensor Networks, John Wiley
& Sons Ltd. (2005) 231-288.
7. Jin, G. Y., Lu, X. Y., Park, M. S.: An Indoor Localization Mechanism using Active RFID
In IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Com-
puting 1, 40-43
8. Chou, L., Sheu, D. C. C., Chen, H. W.: Design and Prototype Implementation of a Novel
Automatic Vehicle Parking System. International Journal of Smart Home, 1, (1), (2007) 11-16
9. Tang, V. W. S., Zheng, Y., Cao, J.: An Intelligent Car Park Management System based on
Wireless Sensor Networks. In 1st International Symposium on Pervasive Computing and
Applications (2006) 65-70
10. Kumar, R., Chilamkurti, N. K., Soh, B.: A Comparative Study of Different Sensors for
Smart Car Park Management. In International Conference on Intelligent Pervasive Compu-
ting (2007) 499-502.
11. Ward, A., Jones, A., Hopper, A.: A New Location Technique for the Active Office. IEEE
Personal Communication, 4, (5) (1997) 42-47
12. Pahlavan, K., Levesque, A. H.: Wireless Information Networks 2
nd
Edition, Wiley (2005)
607-37
13. Bahl, P., Padmanabhan, V. N.: RADAR: An In-Building RF-based User Location and
Tracking System, In IEEE INFOCOM, 2 (2000) 775-784
18
