
RECOGNITION OF VEHICLE NUMBER PLATES
Ondrej Martinsky
Brno University of Technology, Faculty of Information Technology
Bozetechova 2, 61266 Brno, Czech Republic
Keywords: Machine vision, artificial intelligence, neural networks, optical character recognition, OCR, ANPR.
Abstract: This work deals with problematic from field of artificial intelligence, machine vision and neural networks in
construction of an automatic number plate recognition system (ANPR). This problematic includes
mathematical principles and algorithms, which ensure a process of number plate detection, processes of
proper characters segmentation, normalization and recognition. Work comparatively deals with methods
achieving invariance of systems towards image skew, translations and various light conditions during the
capture. Work also contains an implementation of a demonstration model, which is able to proceed these
functions over a set of snapshots.
1 INTRODUCTION
Massive integration of information technologies into
all aspects of modern life caused demand for
processing vehicles as conceptual resources in
information systems. Because a standalone
information system without any data has no sense,
there was also a need to transform information about
vehicles between the reality and information
systems. This can be achieved by a human agent, or
by special intelligent equipment which is be able to
recognize vehicles by their number plates in a real
environment and reflect it into conceptual resources.
Because of this, various recognition techniques have
been developed and number plate recognition
systems are today used in various traffic and security
applications, such as parking, access and border
control, or tracking of stolen cars.
In parking, number plates are used to calculate
duration of the parking. When a vehicle enters an
input gate, number plate is automatically recognized
and stored in database. When a vehicle later exits the
parking area through an output gate, number plate is
recognized again and paired with the first-one stored
in the database. The difference in time is used to
calculate the parking fee. Automatic number plate
recognition systems can be used in access control.
For example, this technology is used in many
companies to grant access only to vehicles of
authorized personnel.
2 MATHEMATICAL ASPECTS OF
NUMBER PLATE
RECOGNITION SYSTEMS
In most cases, vehicles are identified by their
number plates, which are easily readable for
humans, but not for machines. For machine, a
number plate is only a grey picture defined as a two-
dimensional function
),( yxf , where
x
and
y
are
spatial coordinates, and
f
is a light intensity at that
point. Because of this, it is necessary to design
robust mathematical machinery, which will be able
to extract semantics from spatial domain of the
captured image. These functions are implemented in
so-called “ANPR systems”, where the acronym
“ANPR” stands for an “Automatic Number Plate
Recognition”. ANPR system means transformation
of data between the real environment and
information systems.
The design of ANPR systems is a field of
research in artificial intelligence, machine vision,
pattern recognition and neural networks. Because of
this, the main goal of this project is to study
algorithmic and mathematical principles of
automatic number plate recognition systems.
The problematic of number plate area detection
includes algorithms, which are able to detect a
rectangular area of the number plate in original
image. Humans define the number plate in a natural
language as a “small plastic or metal plate attached
136
Martinsky O. (2008).
RECOGNITION OF VEHICLE NUMBER PLATES.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 136-140
DOI: 10.5220/0001673801360140
Copyright
c
SciTePress

to a vehicle for official identification purposes”, but
machines do not understand this definition. Because
of this, there is a need to find an alternative
definition of the number plate based on descriptors,
which will be comprehensible for machines.
The next step in recognition process is the
character segmentation. In most cases, characters are
segmented using the horizontal projection of a pre-
processed number plate, but sometimes these
principles can fail, especially if detected number
plates are too warped or skewed. Then, more
sophisticated segmentation algorithms must be used.
Detected characters can be normalized in many
ways. There are various normalization and detection
methods. At first, character dimensions and
brightness must be normalized to ensure invariance
towards a size and light conditions. Then, a feature
extraction algorithm must be applied on a character
to filter irrelevant data. It is necessary to extract
features, which will be invariant towards character
deformations, used font style etc.
Characters can be classified and recognized by
the simple nearest neighbor algorithm (1NN) applied
to a vector of extracted features, or there is also
possibility to use one of the more sophisticated
classification methods, such as feed-forward or
Hopfield neural networks. Additional heuristic
analyses can be used for elimination of non-
character elements from the plate.
Sometimes, the recognition process may fail and
the detected plate can contain errors. Some of these
errors can be detected by a syntactical analysis of the
recognized plate. If we have a regular expression, or
a rule how to evaluate a country-specific license
plate, we can reconstruct defective plates using this
rule. For example, a number zero “0” can be
automatically repaired to a character “O” on
positions, where numbers are not allowed.
3 PRINCIPLE OF NUMBER
PLATE AREA DETECTION
The first step in a process of automatic number plate
recognition is a detection of a number plate area.
This problematic includes algorithms that are able to
detect a rectangular area of the number plate in an
original image.
Let us define the number plate as a “rectangular
area with increased occurrence of horizontal and
vertical edges”. The high density of horizontal and
vertical edges on a small area is in many cases
caused by contrast characters of a number plate, but
not in every case. This process can sometimes detect
a wrong area that does not correspond to a number
plate. Because of this, we often detect several
candidates for the plate by this algorithm, and then
we choose the best one by a further heuristic
analysis.
The detection of a number plate area consists of
a series of convolve operations. Modified snapshot
is then projected into axes
x
and y . These
projections are used to determine an area of a
number plate.
We can use a periodical convolution of the
function
f
with specific types of matrices m to
detect various types of edges in an image:
(
)
(
)
[
]
() ( ) ( )
11
00
,,,
, mod , mod
wh
wh
ij
f xy f xy xy
f
xy x i y j
−−
==
′
=∗=
⎡
⎤
⋅−−
⎣
⎦
∑∑
m
m
%
(1)
Consequently, we compute a horizontal and vertical
projection for axes
x
and y :
() ( )
1
0
',
m
y
x
j
p
xfxj
−
=
=
∑
;
() ( )
1
0
',
m
x
y
i
p
yfiy
−
=
=
∑
(2)
We can detect the rectangular area of number plate
by an analysis of projection
x
p and
y
p . In praxis,
the analysis is proceeded iteratively in multiple
steps. Each step refines the detected area. If there are
multiple candidates for number plate, a heuristic
analysis is used to determine the correct one. We
assume only one step of iterative process:
()
{
}
()
{
}
() ( )
{}
() ( )
{}
() ( )
{}
() ( )
{}
00
max
max
arg max arg max
max 0 0.3
min 0.3
max 0 0.3
min 0.3
mm
xy
ix jy
left x x
right x x
top y y
bottom y y
xpiy pj
xiixpipx
xixixpipx
yjjypjpy
y
jy j y p j p y
≤< ≤ <
′′
==
′′
=≤<∧≤
′′
=≤<∧≤
′′
=≤<∧≤
′
′
=≤<∧≤
(3)
4 DESKEWING MECHANISM
The captured rectangular plate can be rotated and
skewed in many ways due to the positioning of
vehicle towards the camera. Since the skew
significantly degrades the recognition abilities, it is
RECOGNITION OF VEHICLE NUMBER PLATES
137
important to implement additional mechanisms,
which are able to detect and correct skewed plates.
The fundamental problem of this mechanism is
to determine an angle, under which the plate is
skewed. Then, deskewing of so evaluated plate can
be realized by a trivial affine transformation.
The amount of skew can be evaluated using the
Hough transformation of evaluated image. Hough
transform is a special operation, which is used to
extract features of a specific shape within a picture.
It is important to know, that Hough transform does
not distinguish between the concepts such as
“rotation” and “shear”. The Hough transform can be
used only to compute an approximate angle of image
in a two-dimensional domain.
Let
(, )
f
xy be a continuous function. For each
point
[
]
,ab in Hough space, there is a line in the
“XY” coordinate system. We compute a magnitude
of point
[
]
,ab as a summary of all points in the
“XY” space, which lie on the line
ax b⋅+.
Although the space defined by a coordinate
system is always discrete digital computers, we will
assume that it is continuous. Generally, we can
define the Hough transform
()
,hab of a continuous
function
()
,
f
xy in the unified coordinate system
as:
() ( )
,,hab f xax bdx=⋅+
∫
(4)
x
y
b
a
2
π
−
2
π
0
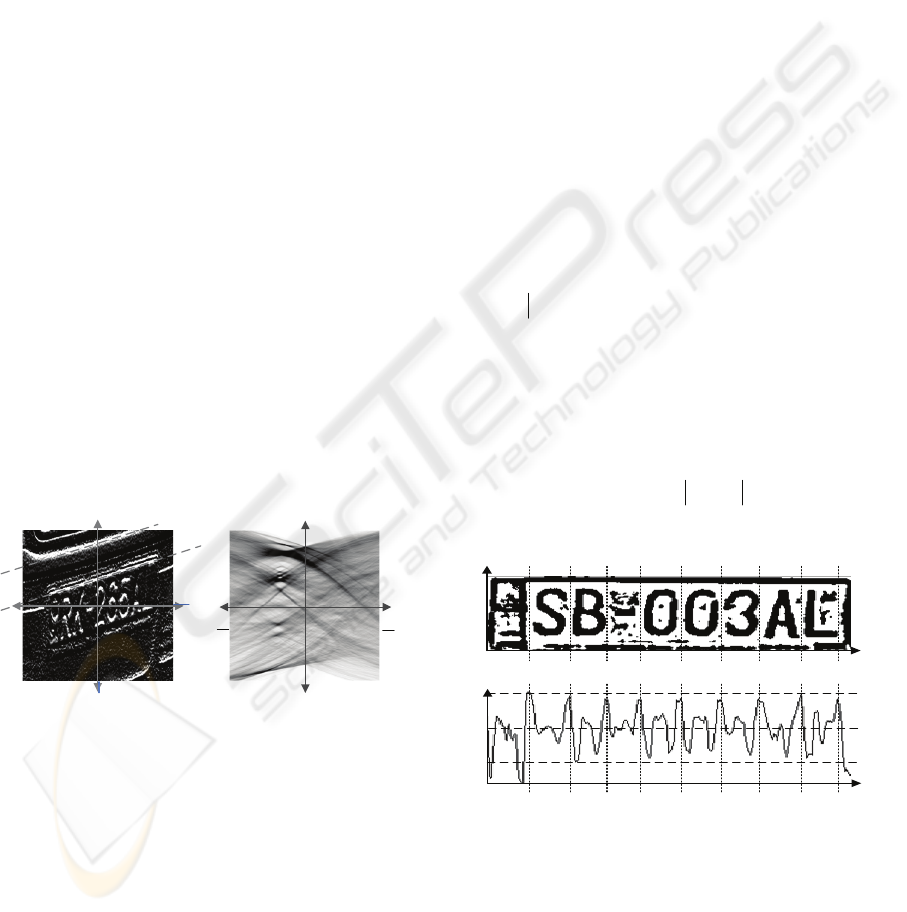
Figure 1: (left) Number plate in the unified “
X
Y ”
coordinate system after application of the horizontal edge
detection filter (right) Hough transform of the number
plate in the “
B
θ
” coordinate system.
We use the Hough transform of certain image to
evaluate its skew angle. You can see the Hough
transform on the figure 1b. The pixels with a
relatively high value are marked by a black color.
Each such pixel corresponds to a long white line in
figure 1a. If we assume that the angle of such lines
determines the overall angle, we can find the longest
line as:
(
)
(
)
{
}
01
01
,argmax,
mm
a
b
ab hab
≤≤
≤≤
=
(5)
Then, the overall angle
θ
of image can be computed
as
(
)
arctan
m
a
θ
= .
5 PRINCIPLE OF CHARACTER
SEGMENTATION
After the detection of number plate area, there is a
need to segment it into individual characters. Let this
area to be described by a discrete function
(
)
,
p
fxy
before, or
(
)
,
p
fxy
′
after the application of adaptive
thresholding.
If characters are not merged together, we can
segment them by the horizontal projection
x
p of the
function
p
f
′
. Let
x
S to be a set of all points on the
x
axis, in which the segmentation is possible:
() ()
{
}
{
}
0.3max
xx
x
Sxpx px=> . Then, the peaks
in horizontal projection
x
p represent the spaces
between characters. Also, there is necessary to
ensure the following condition for the set
x
S : The
spacing between characters cannot be less than a
half of expected character width:
(
)
12 1 2 1 2
,: /2
x
xx S x x x x w¬∃ ∈ ≠ ∧ − <
(6)
(
)
x
px
a
v
m
v
b
v
x
y
x
Figure 2: (top) Number plate after application of the
adaptive thresholding. (bottom) Horizontal projection of
plate with detected peaks. Detected peaks are denoted by
dotted vertical lines.
ICEIS 2008 - International Conference on Enterprise Information Systems
138
6 FEATURE EXTRACTION AND
PROCESSING BY NEURAL
NETWORK
There is also a need to extract feature descriptors
from segmented characters. As an extraction method
significantly affects the quality of whole OCR
(optical character recognition) process, it is very
important to choose descriptors, which are invariant
towards deformations of characters caused by a
skew of image. In the first phase of algorithm, we
normalize dimensions of character to
mn× pixels by
a bilinear interpolation. In the second phase we
apply the Skeletonization algorithm to extract the
skeleton of resampled character. Then we divide it
into several regions (for example consider six
regions organized to three rows and two columns,
fig 3b). Finally, we count the number of occurrences
of individual edge type for each portion of character.
Let
mn
′′
× to be a size of specific portion of
character. We denote the number of occurrences of
specific type of edge for this portion as a cardinality
of the set of coordinates
(, )
x
y , in which the pattern
H (corresponding to the specific type of edge)
occurs:
()
(, ) ( 1, )
(, 1) ( 1, 1)
,0 10 1
fxy fx y
fxy fx y
xy x m y n
H
+
+++
′′
⎧⎫
≤ < −∧ ≤ < −∧
⎪⎪
⎨⎬
⎛⎞
=
⎜⎟
⎪⎪
⎝⎠
⎩⎭
(7)
where
(
)
01
01
v
H =
,
(
)
00
11
h
H =
,
(
)
01
10
1d
H =
,
(
)
10
01
2d
H =
are matrices corresponding to patterns
for vertical, horizontal and diagonal edges.
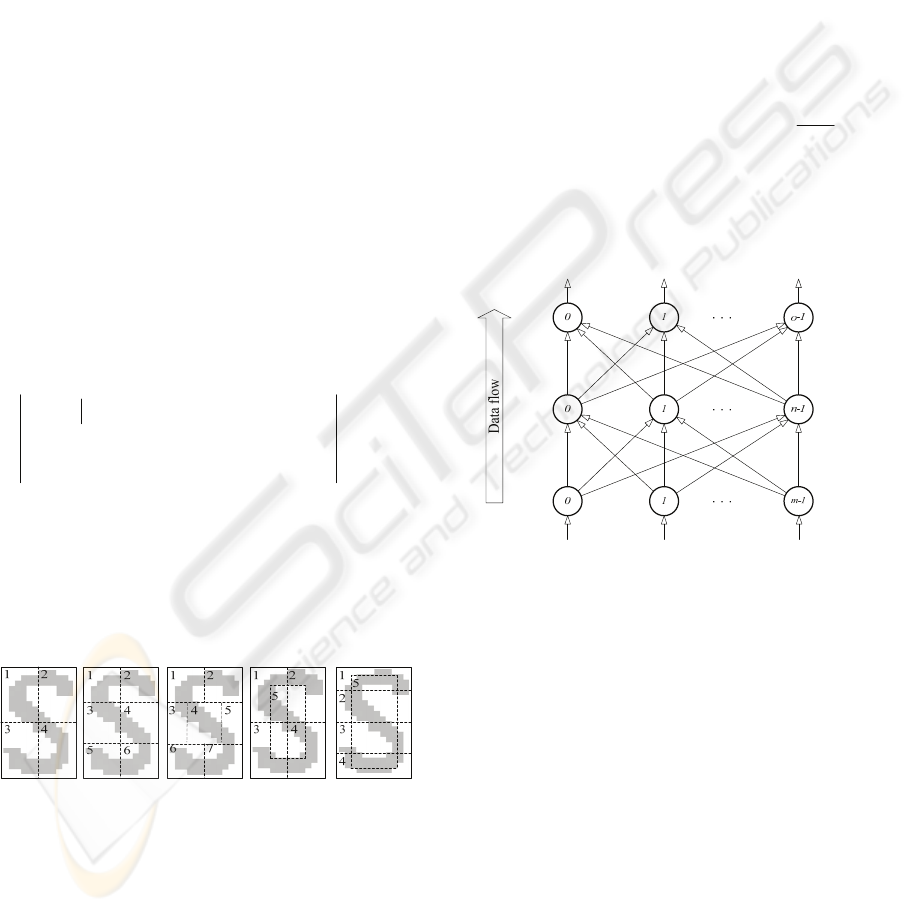
Figure 3: Layouts of regions in the character bitmap. The
regions can be disjunctive as well as they can overlap each
other.
Then, the vector of so chosen descriptors is twenty-
four dimensional (
24m = , six regions, each with
four edge types). This vector is directly mapped to
an input layer of the three-layer backpropagation
neural network. The middle layer contains scalable
number of neurons (typically
14 20n = K ). The
output layer of neural network contains
36o
=
neurons, each neuron for one character from
alphabet
(,09)AZKK.
The threshold coefficients of neurons on the
middle and output layer are marked as
i
τ
, or
i
ϑ
respectively. The weights of synaptical connections
for
k
th
layer are marked as
,
k
ij
w .
The propagation of data in NN is performed
according to computational functions of neuron
()
(1)
,
1
m
ii ijj
j
zg wx
τ
=
=+ ⋅
⎛⎞
⎜⎟
⎜⎟
⎝⎠
∑
and
()
(2)
,
1
n
iijj
j
i
wzyg
ϑ
=
+⋅=
⎛⎞
⎜⎟
⎜⎟
⎝⎠
∑
for the second and third layer, where
g
is a
sigmoidal activation function
()
1
1
e
e
g
ξ
ξ
ξ
−
−
−
+
= . The
output of network is represented by a vector
y ,
which determines the recognized character
r
i of
alphabet
0
arg max{ }
ri
iZ
iy
≤≤
=
.
(2)
0
ϑ
(2)
1
ϑ
(2)
1o
ϑ
−
0
x
1
x
1m
x
−
0
y
1
y
1o
y
−
(1)
0
ϑ
(1)
1
ϑ
(1)
1n
ϑ
−
(0)
0
ϑ
(0)
1
ϑ
(0)
1m
ϑ
−
0
z
1
z
1n
z
−
(1)
,ij
w
(2)
,ij
w
Figure 4: Architecture of the three layer feed-forward
neural network.
7 CONCLUSIONS
This project deals with algorithmic and
mathematical aspects of the automatic number plate
recognition systems, such as problematic of machine
vision, pattern recognition, OCR and neural
networks. This paper is based on my thesis
(http://www.fit.vutbr.cz/study/DP/rpfile.php?id=302),
which comparatively describes all implemented
principles and contains demonstration ANPR
software which demonstrates all described
algorithms. This project meets two goals. The first
goal is to provide basic know-how for readers and
allow them to understand these principles in detail.
This work should help readers to implement
RECOGNITION OF VEHICLE NUMBER PLATES
139

generally similar system for character recognition.
This thesis interconnects theory and praxis, and
permits readers to experiment with described
principles in the demonstration model written in
Java
TM
. This was the second goal of this project. (for
more information, see project web site at
http://javaanpr.sf.net)
ANPR solution has been tested on static snapshots
of vehicles, which has been divided into several sets
according to difficultness. Sets of blurry and skewed
snapshots give worse recognition rates than a set of
snapshots, which has been captured clearly. The
objective of the tests was not to find a one hundred
percent recognizable set of snapshots, but to test the
invariance of the algorithms on random snapshots
systematically classified to the sets according to
their properties. The average recognition rate was
about 80%. The system achieves this recognition
rate over a set of static snapshots.
The recognition ability of this system can be
rapidly increased by processing data from video
sequences. The short video sequence contains
several frames of incoming vehicle. The similarity
between these frames makes whole video sequence
very redundant. This redundancy can be used to
increase recognition abilities. If the system has 80%
chance to successfully recognize one frame, then the
overall recognition rate can be up to 99%, if we
process several consequent frames from the video
sequence.
Since processing of video sequence is a difficult
computational operation, it is necessary to use an
appropriate hardware and software platform. The
combination of C-language and DSP processor
should be suitable.
Currently I am developing a modified version of
this algorithm for a practical security application in
Brno in cooperation with Faculty of Information
Technology.
Table 1: Recognition rates of the ANPR system (static
snapshots).
. Number of plates Weighted score
Clear plates 68 87.2
Blurred plates 52 46.87
Skewed plates 40 51.64
Average plates 177 73.02
Table 2: Algorithm complexity and system throughput on
AMD Opteron
TM
(1 GHz) processor architecture.
Snapshot resolution Average time
320x240 0.74 s
640x480 1.17 s
720x576 1.40 s
800x600 1.46 s
ACKNOWLEDGEMENTS
JavaANPR is a part of the research plan “Security-
oriented research in information technology, MSM
0021630528” at Brno University of Technology.
REFERENCES
Gonzalez, R., Woods R., 2002. Digital Image Processing,
Prentice Hall, Upper Saddle River, New Jersey.
Shapiro, V., Dimov, D., Bonchev, S., Velichkov, V.,
Gluhchev, G., 2004. Adaptive License Plate Image
Extraction, International Conference Computer
Systems and Technologies, Rousse, Bulgaria.
Zhang, Y., Zhang, C., 2003. New Algorithm for Character
Segmentation of License Plate, Intelligent Vehicles
Symposium, IEEE.
Fukunaga, K., 1990. Introduction to statistical pattern
recognition, Academic Press, San Diego, USA.
Kuba M., 1995. Neural Networks, Faculty of Informatics,
Masaryk University, Brno, Czech Republic.
Kvasnicka, V., Benuskova, L., Pospichal, J., Farkas I.,
Tino, P., Kral, A. Introduction to Neural Networks,
Technical University, Kosice, Slovak Republic.
Minsky, M., Papert, S., 1969. Perceptons. An Introduction
to Computational Geometry, MIT Press:. Cambridge,
Massachusetts.
Smagt, P., 1990. Comparative study of neural network
algorithms applied to optical character recognition,
International conference on Industrial and engineering
applications of artificial intelligence and expert
systems, Charleston, South Carolina, USA.
Srivastava, R., 1991. Transformations and distortions
tolerant recognition of numerals using neural
networks, ACM Annual Computer Science
Conference, San Antonio, Texas, USA.
ICEIS 2008 - International Conference on Enterprise Information Systems
140
