
A GENERIC ARCHITECTURE FOR A COMPANION ROBOT
∗
Bas R. Steunebrink, Nieske L. Vergunst, Christian P. Mol, Frank P. M. Dignum
Mehdi Dastani and John-Jules Ch. Meyer
Intelligent Systems Group, Institute of Information and Computing Sciences
Utrecht University, The Netherlands
Keywords:
Social robot, architecture.
Abstract:
Despite much research on companion robots and affective virtual characters, a comprehensive discussion on a
generic architecture is lacking. We compile a list of possible requirements of a companion robot and propose
a generic architecture based on this list. We explain this architecture to uncover issues that merit discussion.
The architecture can be used as a framework for programming companion robots.
1 INTRODUCTION
Recently, research in companion robots and affective
virtual characters has been increasing steadily. Com-
panion robots are supposed to exhibit sociable be-
havior and perform several different kinds of tasks
in cooperation with a human user. Typically, they
should proactively assist users in everyday tasks and
engage in intuitive, expressive, and affective interac-
tion. Moreover, they usually have multiple sensors
and actuators that allow for rich communication with
the user. Of course, the task of designing and building
a companion robot is highly complex.
Companion robots and affective virtual charac-
ters have already been built up to quite advanced
stages. However, teams wishing to research compan-
ion robots often have to start from scratch on the soft-
ware design part, because it is hard to distill a firm
framework from the literature to use as a basis. Of
course many figures representing architectures have
been published, but it remains difficult to find out
how existing companion robots really work internally.
This may be due to most publications focusing on test
results of the overall behaviors rather than on explain-
ing their architectures in the level of detail required
for replication.
The lack of emphasis on architectures may be
caused by much of the research on companion robots
being driven by the teams’ research goals, resulting in
their architectures mostly being designed to support
∗
This work supported by SenterNovem, Dutch Compan-
ion project grant nr: IS053013.
just the desired behaviors instead of being generic for
companion robots. If there were a good generic ar-
chitecture for companion robots, a (simple) default
implementation could be made, providing (new) re-
searchers with a framework that they could use as a
starting point. Depending on the application domain
and research goals, some default implementations of
modules constituting the architecture may be replaced
to achieve the desired custom behavior, while other
modules can just be readily used to complete the soft-
ware of the companion robot.
Of course, anyone wishing to build the software
of a companion robot can just start up his/her favorite
programming environment and try to deal with prob-
lems when they occur, but obviously this is not a very
good strategy to follow. Instead, designing and dis-
cussing an architecture beforehand raises interesting
issues and allows questions to be asked that otherwise
remain hidden. Indeed, there are many non-trivial
choices that have to be made, pertaining to e.g. dis-
tribution and assignment of control among processes,
synchronization of concurrent processes, which pro-
cess is to convert what data into what form, where
to store data in what form, which process has ac-
cess to which stored data, which process/data influ-
ences which other process and how, the types of ac-
tion abstractions that can be distinguished (e.g. strate-
gic planning actions, dialogue actions, locomotion ac-
tions), the level of action abstraction used for reason-
ing, who converts abstract actions into control sig-
nals, how are conflicts in control signals resolved,
what are the properties of a behavior emerging from
315
R. Steunebrink B., L. Vergunst N., P. Mol C., P. M. Dignum F., Dastani M. and Ch. Meyer J. (2008).
A GENERIC ARCHITECTURE FOR A COMPANION ROBOT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 315-321
DOI: 10.5220/0001509103150321
Copyright
c
SciTePress

a chosen wiring of modules, what defines the char-
acter/personality of a companion robot (is it stored
somewhere, can its parameters be tweaked, or does it
emerge from the interactions between the modules?).
Answers to these and many other questions may not
be obvious when presented with a figure representing
an architecture, but these issues can be made explicit
by proposing and discussing one.
In this paper we introduce an architecture which
is generic for companion robots and explain it in as
much detail as possible in this limited space. This
architecture contains the components necessary to
produce reasonably social behavior given the mul-
timodality of a companion robot’s inputs and out-
puts. We do not claim that the proposed architecture
represents the ultimate companion robot architecture.
Rather, the aim of this paper is to provoke a discus-
sion on the issues and choices involved in designing
the software of a companion robot. Ultimately, this
work could lead to the implementation of a generic
framework that could be used as a basis for the soft-
ware of new companion robots.
This paper is outlined as follows. In Section 2,
we gather a list of possible requirements for a com-
panion robot and introduce our architecture satisfying
these requirements. In Section 3, we treat the func-
tional components in the architecture in more detail.
In Section 4, we connect the functional components
by explaining the interfaces between them. We dis-
cuss some related work in Section 5 and finish with
conclusions and plans for future research in Section
6.
2 POSSIBLE REQUIREMENTS
FOR A COMPANION ROBOT
In order to come up with a generic architecture suit-
able for companion robots, we must first investi-
gate the possible requirements for a companion robot.
These requirements are optional, meaning that only
the ‘ultimate’ companion robot would satisfy them
all. In practice however, a companion robot does
not have to. The actual requirements depend on var-
ious factors, such as the application area of the robot
and its hardware configuration. However, below we
compile a list, as exhaustive as possible, of possible
requirements which a generic architecture must take
into account.
First of all, a companion robot should be able to
perceive the world around it, including auditory, vi-
sual, and tactile information. The multimodality of
the input creates the need for synchronization (e.g.,
visual input and simultaneously occurring auditory
input are very likely to be related), and any input
inconsistent over different modalities should be re-
solved. Moreover, input processors can be driven
by expectations from a reasoning system to focus the
robot’s attention to certain signals. Of course, any in-
coming data must be checked for relevancy and cate-
gorized if it is to be stored (e.g., to keep separate mod-
els of the environment, its users, and domain knowl-
edge).
A companion robot should be able to communi-
cate with the user in a reasonably social manner. This
means not only producing sensible utterances, but
also taking into account basic rules of communication
(such as topic consistency). In order to maintain a ro-
bust interaction, a companion robot must always be
able to keep the conversation going (except of course
when the user indicates that he is done with the con-
versation). This also involves real-time aspects; e.g.,
to avoid confusing or boring the user, long silences
should not occur in a conversation.
Additionally, a companion robot is likely to be de-
signed for certain specific tasks, besides communicat-
ing with its users. Depending on e.g. the domain for
which the companion robot is designed and the type
of robot and the types of tasks involved, this may call
for capabilities involving planning, physical actions
such as moving around and manipulating objects, or
electronic actions (e.g., performing a search on the
internet or programming a DVD recorder). Proactive-
ness on part of the robot is often desirable in tasks
involving cooperation.
A companion robot should also exhibit some low-
level reactive behaviors that do not (have to) enter
the reasoning loop, such as blinking and following
the user’s face, and fast reactive behaviors such as
startling when subjected to a sudden loud noise. To
make the interactions more natural and intuitive, a
companion robot should also be able to form and ex-
hibit emotions. These emotions can be caused by
cognitive-level events, such as plans failing (disap-
pointment), goal achievement (joy), and perceived
emotions from the user (if negative: pity). Reac-
tive emotions like startle or disgust can also influ-
ence a robot’s emotional state. Moreover, emotions
can manifest themselves in many different ways; e.g.,
facial expressions, speech prosody, selecting or aban-
doning certain plans, etc.
Finally, a companion robot should of course pro-
duce coherent and sensible output over all available
modalities. Because different processes may produce
output concurrently and because a companion robot
typically has multiple output modalities, there should
be a mechanism to synchronize, prioritize, and/or
merge these output signals; e.g., speech should co-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
316

incide with appropriate lip movements, which should
overrule the current facial animation, but only the part
that concerns the mouth of the robot (provided it has
a mouth with lips).
In Figure 1, we present a generic architecture for
companion robots which accounts for the require-
ments described above. Note that we abstract from
specific robot details, making the architecture useful
for different types of companion robots. We empha-
size again that this is an architecture for an ‘ultimate’
companion robot; in practice, some modules can be
left out or implemented empty.
3 FUNCTIONAL COMPONENTS
CONSTITUTING THE
ARCHITECTURE
In this section we describe the ‘blocks’ that constitute
the proposed architecture. The interfaces (‘arrows’)
between the components are explained in Section 4.
To begin with, the architecture is divided into
eight functional components (i.e. the larger boxes
encompassing the smaller blocks). Each functional
component contains several modules that are func-
tionally related. Modules drawn as straight boxes rep-
resent data storages, the rounded boxes represent pro-
cesses, and the ovals represent sensors and actuators.
Each process is allowed to run in a separate thread, or
even on a different, dedicated machine.
No synchronization is forced between these pro-
cesses by the architecture; they can simply send in-
formation to each other (see Section 4), delegating
the task of making links between data coming in from
different sources to the processes themselves. Below,
each of the eight functional components is described,
together with the modules they encompass.
Input Modalities. A companion robot typically has
a rich arsenal of input modalities or sensors. These
are grouped in the lower left corner of Figure 1, but
only partially filled in. Of course, different kinds of
companion robots can have different input modalities,
of which a camera and a microphone are probably the
most widely occurring. Other sensors may include
touch, (infrared) proximity, accelerometer, etc.
Input Preprocessing. It is impractical for a reason-
ing engine to work directly with most raw input data,
especially raw visual and auditory data. Therefore,
several input preprocessing modules must exist in or-
der to extract salient features from these raw inputs
and convert these to a suitable data format. Some in-
put modalities may even require multiple preprocess-
ing modules; for example, one audio processing mod-
ule may extract only speech from an audio signal and
produce text, while another audio processing module
may extract other kinds of sounds to create a level of
‘sound awareness’ for the companion robot.
Note that some of these input preprocessing mod-
ules may be readily available as off-the-shelf software
(most notably, speech recognizers), so a generic archi-
tecture must provide a place for them to be plugged
in.
Furthermore, there may be need for an input syn-
chronizer that can make links between processed data
from different modalities, in order to pass it as a sin-
gle event to another module. The input synchronizer
may initially be implemented empty; that is, it sim-
ply passes all processed data unchanged to connected
modules. The input synchronizer can also be used to
dispatch expectations that are formed by the action
selection engines to the input preprocessing modules,
which can use these expectations to facilitate feature
recognition.
Low-level Behaviors. Low-level behaviors are au-
tonomous processes that compete for control of actu-
ators in an emergent way. Some behaviors may also
influence each other and other modules. Examples
of low-level behaviors include face tracking and gaze
directing, blinking, breathing, and other ‘idle’ anima-
tions, homeostasis such as the need for interaction,
sleep, and ‘hunger’ (low battery power), and reactive
emotions such as startle and disgust.
Action Selection Engines. The ‘heart’ of the ar-
chitecture is formed by the action selection engines.
These are cognitive-level processes that select actions
based on collections of data, goals, plans, events,
rules, and heuristics. The outputs that they produce
can generally not be directly executed by the actua-
tors, but will have to be preprocessed first to appro-
priate control signals. Note that the interpreters of the
action selection engines are depicted as layered to in-
dicate that they can be multi-threaded.
The reasoning engine may be based on the BDI
theory of beliefs, desires, and intentions (Bratman,
2002), deciding which actions to take based on per-
cepts and its internal state. It should be noted that
in terms of the BDI theory, the databases component
plus the working memories of the action selection en-
gines constitute the robot’s beliefs.
An action selected by the reasoning engine may be
sent to an output preprocessing module, but it can also
consist of a request to initiate a dialogue. Because dia-
logues are generally complex and spread over a longer
period of time, a dedicated action selection engine
may be needed to successfully have a conversation.
A GENERIC ARCHITECTURE FOR A COMPANION ROBOT
317
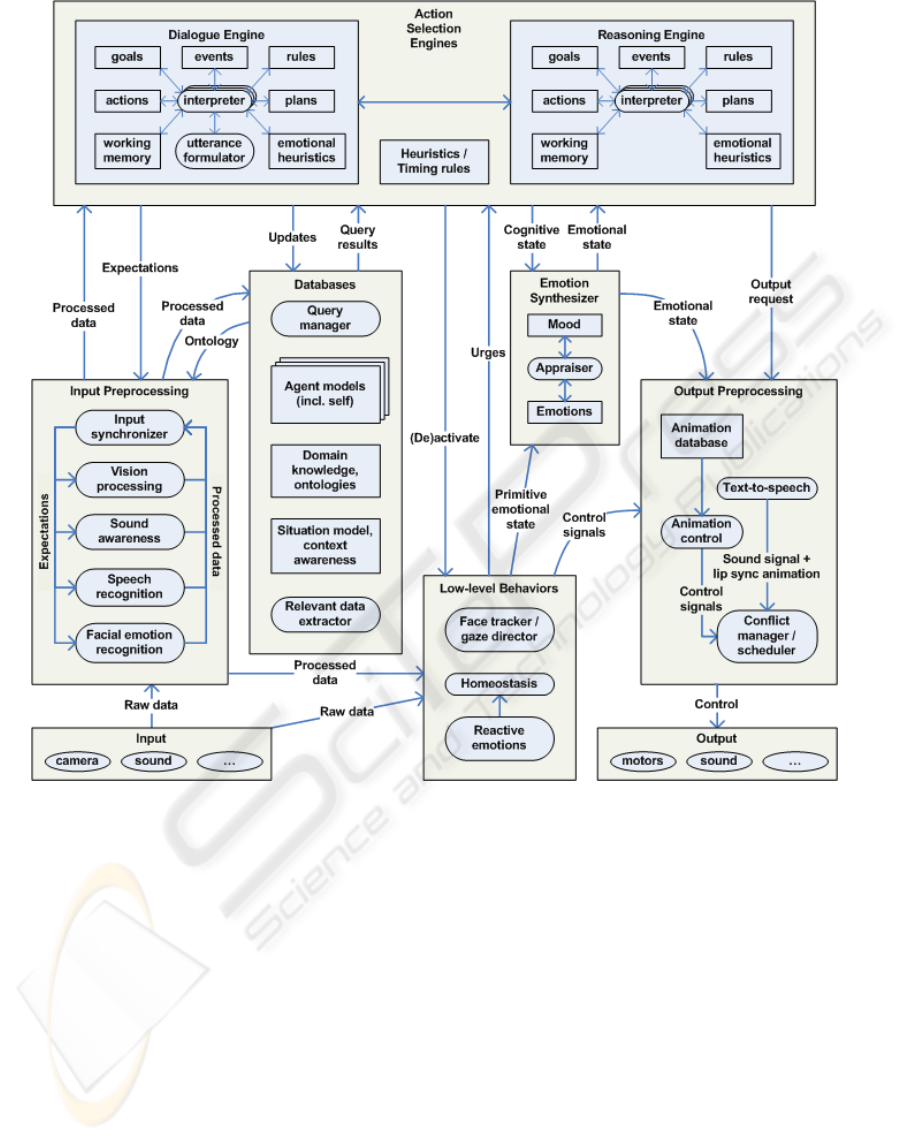
Figure 1: A generic architecture for a companion robot. The architecture takes into account the possible (or rather, probable)
existence of multiple input modalities, multiple input preprocessing modules for each input modality, databases for filtering,
storing, and querying relevant information, action selection engines for complex, goal-directed, long-term processes such as
conversing, planning, and locomotion, an emotion synthesizer producing emotions that influence action selection and ani-
mations, multiple (reactive) low-level behaviors that can compete for output control, multiple output preprocessing modules
including a conflict manager, and finally, multiple output modalities. Straight boxes stand for data storages, rounded boxes
for processes, and ovals for sensors/actuators. The interfaces (arrows) between different modules indicate flow of data or
control; the connections and contents are made more precise in the text. Note that only the ‘ultimate’ companion robot would
fully implement all depicted modules; a typical companion robot implementation will probably leave out some modules or
implement them empty, awaiting future work.
This dialogue engine contains an extra process called
an utterance formulator; the task of this module is to
convert an illocutionary act to fully annotated text, i.e.
the exact text to utter together with information about
speed, emphasis, tone, etc. This text can then be con-
verted to audio output by the text-to-speech module
(in the output preprocessing component).
A similar discussion about separating dialogues
and (strategic) planning can be held for locomotion.
In our research we have worked with stationary com-
panion robots that focus on dialogues and facial ani-
mations. But there can of course be companion robots
with advanced limbs and motions. For such robots
there may be need for a third action selection engine,
dedicated to motion planning. In the proposed archi-
tecture, there is room for additional dedicated engines
in the functional component of action selection en-
gines.
Finally, the architecture provides for a module
called heuristics / timing rules. This is a collection
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
318

of heuristics for balancing control between the differ-
ent action selection engines, as they are assumed to be
autonomous processes. The different engines will get
priorities in different cases; e.g., the plans of the dia-
logue engine will get top priority if a misunderstand-
ing needs to be repaired. On the other hand, if the
dialogue engine does not have any urgent issues, the
reasoning engine will get control over the interaction
in order to address its goals. Furthermore, it can ver-
ify whether the goals of the different action selection
engines adhere to certain norms that apply to the com-
panion robot in question, as well as provide new goals
based on timing rules; e.g., to avoid long silences, the
robot should always say something within a few sec-
onds, even if the reasoning engine is still busy.
Databases. We have created a distinct functional
component in the architecture where data is stored in
different forms. This data includes domain knowl-
edge, ontologies, situation models, and profiles of the
robot itself and of other agents. The ontologies and
domain knowledge are (possibly static) databases that
are used by the input preprocessing modules to find
data representations suitable to the action selection
engines and databases. The agent profiles store infor-
mation about other agents, such as the robot’s interac-
tion histories with these modeled agents, the common
grounds between the robot and each modeled agent,
and the presumed beliefs, goals, plans, and emotions
of each modeled agent. These agent models also in-
clude one of the robot itself, which enables it to reason
about its own emotions, goals, etc.
In order to provide a consistent interface to these
different databases, a query manager must be in place
to handle queries, originating from the action selec-
tion engines. A special situation arises when the robot
queries its own agent model, for there already exist
modules containing the goals, plans, and emotions of
the robot itself. So the query manager should ensure
that queries concerning these types of data can get
their results directly from these modules.
Finally, a relevant data extractor takes care of
interpreting incoming data in order to determine
whether it can be stored in a more suitable format;
e.g., if visual and auditory data from the input pre-
processing component provides new (updated) infor-
mation about the environment of the robot, it is in-
terpreted by the relevant data extractor and stored
in the situation model. Moreover, simple spatial-
temporal reasoning may be performed by the relevant
data extractor. If advanced spatial-temporal reasoning
is needed for some companion robot, it may be better
to delegate this task to a separate input preprocessing
module.
Emotion Synthesizer. Typically, companion robots
must show some level of affective behavior. This
means responding appropriately to emotions of a (hu-
man) user, but also includes experiencing emotions it-
self in response to the current situation and its internal
state. The emotions that concern this functional com-
ponent are those of the companion robot itself and are
at a cognitive level, i.e., at the level of the action se-
lection engines. Examples of emotions are joy when
a goal is achieved, disappointment when a plan fails,
resentment when another agent (e.g. a human user)
gains something at the expense of the robot, etc. More
reactive emotions (e.g., startle) can be handled by a
low-level behavior.
The emotion component consists of three parts.
The appraiser is a process that triggers the creation
of emotions based on the state of the action selec-
tion engines. The intensity of triggered emotions is
influenced by the robot’s mood (the representation
of which may be as simple as a single number) and
a database of previously triggered emotions. This
database of emotions then influences the action se-
lection engines (by way of their emotional heuris-
tics module) and the animations of the robot, e.g., by
showing a happy or sad face.
Output Preprocessing. Different processes may try
to control the robot’s actuators at the same time; obvi-
ously, this calls for conflict management and schedul-
ing of control signals. Moreover, some modules may
produce actions that cannot be directly executed, but
instead these abstract actions need some preprocess-
ing to convert them to the low-level control signals
expected by the robot’s actuators. E.g., the dialogue
engine may want some sentence to be uttered by the
robot, but this must first be converted from text to a
sound signal before it can be sent to the loudspeaker.
This functionality is provided by the text-to-speech
module, which is also assumed to produce corre-
sponding lip sync animations.
For companion robots with a relatively simple mo-
tor system, it suffices to have a single module for
animation control which converts abstract animation
commands to low-level control signals. This can be
done with the help of an animation database contain-
ing sequences of animations that can be invoked by
name and then readily played out. For companion
robots with a complex motor system, the animation
control module may be replaced by a motion engine
(which is placed among the other action selection en-
gines), as discussed above. In this case, an anima-
tion database may still fulfill an important role as a
storage of small, commonly used sequences of motor
commands.
Finally, actuator control requests may occur con-
A GENERIC ARCHITECTURE FOR A COMPANION ROBOT
319

currently and be in conflict with each other. It is
the task of the conflict manager to provide the actua-
tors with consistent control signals. This can be done
by choosing between conflicting requests, scheduling
concurrent requests, or merging them. These choices
are made on a domain-dependent basis.
Output Modalities. All output modalities or actua-
tors are grouped in the lower right corner of Figure 1.
Similarly with the input modalities, these will be dif-
ferent for different kinds of companion robots, but a
typical companion robot will probably have at least
some motors (for e.g. facial expressions and locomo-
tion) and a loudspeaker. Other actuators may include
lights, radio, control of other electronic devices, etc.
4 INTERFACES BETWEEN
FUNCTIONAL COMPONENTS
In this section, we explain the meaning of the inter-
faces between the functional components. For cos-
metic reasons, the ‘arrows’ in Figure 1 appear to lead
from one functional component to another, while they
actually connect one or more specific modules inside
a functional component to other modules inside an-
other functional component. References to arrows in
Figure 1 are marked in boldface.
Raw Data that is obtained by the input sensors
is sent to the input preprocessing component for pro-
cessing. Needless to say, data from each sensor is sent
to the appropriate processing module; e.g., input from
the camera is sent to the vision processing and facial
emotion recognition modules, while input from the
microphone is sent to the sound awareness and speech
recognition modules. Any module inside the low-
level behaviors component is also allowed to access
all raw input data if it wants to perform its own feature
extraction. In addition to raw data, low-level behav-
iors also have access to the Processed data from the
modules inside the input preprocessing component.
After the processed data is synchronized (or not) by
the input synchronizer, it is sent to the action selec-
tion engines, where it is placed in the events mod-
ules inside the engines. The processed data is also
sent to the databases, where the relevant data extractor
will process and dispatch relevant data to each of the
databases; e.g., context-relevant features are added to
the situation model, while emotions, intentions and
attention of a user that are recognized by the various
input preprocessing modules are put in the appropri-
ate agent model. Furthermore, the action selection
engines can form Expectations about future events.
These expectations are sent from the action selection
engines back to the input synchronizer, which subse-
quently splits up the expectations and sends them to
the appropriate input processing modules. They can
then use these expectations to facilitate processing of
input.
All processing modules in the input preprocess-
ing component have access to Ontology information,
which they might need to process raw data properly;
e.g., the vision processing module might need onto-
logical information about a perceived object in order
to classify it as a particular item. This also ensures
the use of consistent data formats. The processing
modules can obtain this ontological information via
the query manager in the databases component, which
takes care of all queries to the databases. Updates to
the databases can be performed by the action selec-
tion engines. The updates are processed by the rel-
evant data extractor, which places the data in a suit-
able format in the appropriate database, in the same
way as the processed data from the input preprocess-
ing component. Query results can be requested by
the action selection engines from the databases. The
query manager processes the query and searches the
proper database(s), guaranteeing a coherent interface
to all databases.
(De)activate signals can be sent from the action
selection engines to the low-level behaviors compo-
nent. These signals allow the action selection engines
some cognitive control over the robot’s reactive be-
havior; e.g., if needed, the face tracker can be acti-
vated or deactivated, or in some special cases the re-
active emotions can be turned off. Urges arising from
the low-level behaviors can be made into goals for the
action selection engines. For example, if the home-
ostasis module detects a low energy level, a goal to
go to the nearest electricity socket can be added to the
goals of the motion engine.
The action selection engines provide their Cog-
nitive state to the emotion synthesizer. The cog-
nitive state can be used by the appraiser to synthe-
size appropriate emotions. In addition to the cogni-
tive state, a Primitive emotional state is also sent to
the appraiser, where it can influence the intensity of
cognitive-level emotions and the robot’s mood. The
current Emotional state, which is a compilation of
the collection of triggered emotions, is sent to the ac-
tion selection engines. The emotional heuristics in-
side the action selection engines then determine how
the interpreter is influenced by these emotions. The
animation control module inside the output prepro-
cessing component also receives the emotional state
of the agent, so that it can select a suitable facial ex-
pression from the animation database representing the
current emotional state.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
320

Output Requests are sent from the interpreters
inside action selection engines to the output prepro-
cessing component. Of course, the different kinds of
output requests are sent to different modules inside
the output preprocessing; e.g., (annotated) utterances
from the dialogue engine’s utterance formulator are
sent to the text-to-speech module, while any actions
from the action selection engines that involve motors
are sent to the animation control module. The syn-
chronization of all output signals is taken care of by
the conflict manager, as explained in the previous sec-
tion. Finally, Control signals are gathered and syn-
chronized by the conflict manager inside the output
preprocessing component and sent to the appropriate
output modality.
5 DISCUSSION AND RELATED
WORK
We do not claim that the presented architecture is
perfect, and although we claim that it is generic for
companion robots, it is probably not unique. Another
team setting out to make a generic companion robot
architecture will probably come up with a different
figure. However, we expect the level of complexity
of alternative architectures to resemble that of the one
presented here, as it takes many components and pro-
cesses to achieve reasonably social behavior. It should
be noted that the intelligence of the system may not
lie within the modules, but rather in the wiring (the
“arrows”). The presentation of an architecture should
therefore include a discussion on the particular choice
of interfaces between modules. We draw confidence
in our architecture from the fact that mappings can be
found between this one and the architectures of exist-
ing companion robots and affective virtual characters,
several of which we discuss next.
Breazeal (Breazeal, 2002) uses competing behav-
iors for the robot Kismet in order to achieve an emerg-
ing overall behavior that is sociable as a small child.
Kismet has a number of different response types with
activation levels that change according to Kismet’s in-
teraction with a user. In Kismet’s architecture, the Be-
havior System and Motivation System can be mapped
on our low-level behaviors; however, it lacks cogni-
tive reasoning (obviously this was not necessary for
its application), which is provided by our action se-
lection engines. Other components in Kismet’s archi-
tecture pertain to input and output processing, which
map to corresponding preprocessing modules in our
architecture.
Max, the “Multimodal Assembly eXpert” devel-
oped at the University of Bielefeld (Kopp, 2003), can
also be mapped to our architecture. For example, it
uses a reasoning engine that provides feedback to the
input module to focus attention to certain input sig-
nals, which is similar to our expectations. It also has
a lower-level Reactive Behavior layer that produces
direct output without having to enter the reasoning
process, and a Mediator that performs the same task
as our conflict manager (i.e. synchronizing output).
However, Max only has one (BDI) reasoning engine,
where we have provided for two or more action selec-
tion engines.
6 CONCLUSIONS AND FUTURE
RESEARCH
In this paper, we have presented a generic architecture
for a companion robot. We do not claim that it should
be the foundation of the ‘ultimate’ companion robot;
rather, we have presented this architecture in order to
make many of the issues encountered when program-
ming a companion robot explicit, so that these issues
can be appropriately discussed.
The implementation of our companion robot ar-
chitecture is yet to be finished, although it should be
noted that it does not have to be fully implemented in
all cases. Some of the functional components can be
left out, simplified, or even extended (depending on
the application) or programmed empty (awaiting fu-
ture work), while for some modules, off-the-shelf or
built-in software can be used. We are using the Philips
iCat (Van Breemen, 2005) as a platform for develop-
ing a proof of concept of the proposed architecture.
Ultimately, it can be used as a framework on top of
which the software of new companion robots can be
developed.
REFERENCES
Bratman, M., Intention, Plans, and Practical Reasoning,
Harvard U. Press, 1987.
Breazeal, C.L., Designing Sociable Robots, MIT Press,
2002.
Van Breemen, A.J.N. iCat: Experimenting with Ani-
mabotics, AISB 2005 Creative Robotics Symposium,
England, 2005.
Kopp, S., Jung, B., Lessmann, N., Wachsmuth, I. Max – A
Multimodal Assistant in Virtual Reality Construction.
In KI-K
¨
unstliche Intelligenz 4/03, p. 11-17, 2003.
A GENERIC ARCHITECTURE FOR A COMPANION ROBOT
321
