
Learning and Evolution in Artificial Neural Networks:
A Comparison Study
Eva Volna
University of Ostrava, 30
ht
dubna st. 22, 701 03 Ostrava, Czech Republic
Abstract. This paper aims at learning and evolution in artificial neural
networks. Here is presented a system evolving populations of neural nets that
are fully connected multilayer feedforward networks with fixed architecture
solving given tasks. The system is compared with gradient descent weight
training (like backpropagation) and with hybrid neural network adaptation. All
neural networks have the same architecture and solve the same problems to be
able to be compared mutually. In order to test the efficiency of described
algorithms, we applied them to the Fisher's Iris data set [1] that is the bench
test database from the area of machine learning.
1 Learning in Artificial Neural Networks
Learning in artificial neural networks is typically accomplished using examples. This
is also called training in artificial neural networks because the learning is achieved by
adjusting the connection weights in artificial neural networks iteratively so that
trained (or learned) artificial neural networks can perform certain tasks. The essence
of a learning algorithm is the learning rule, i.e. a weight-updating rule, which
determines how connection weights are changed. Examples of popular learning rules
include the delta rule, the Hebbian rule, the anti-Hebbian rule, and the competitive
learning rule, etc. More detailed discussion of artificial neural networks can be found
in [2]. Learning in artificial neural networks can roughly be divided into supervised,
unsupervised, and reinforcement learning. Without commonness, we are going to
target multilayer feedforward neural networks that are adapted with backpropagation
algorithm.
Supervised learning is based on direct comparison between the actual output of an
artificial neural network and the desired correct output, also known as the target
output. It is often formulated as the minimization of an error function such as the total
mean square error between the actual output and the desired output summed over all
available data. A gradient descent-based optimization algorithm such as
backpropagation [2] can then be used to adjust connection weights in the artificial
neural network iteratively in order to minimize the error. There have been some
successful applications of backpropagation in various areas [3]–[5], but
backpropagation has drawbacks due to its use of gradient descent. It often gets
trapped in a local minimum of the error function and is incapable of finding a global
minimum if the error function is multimodal and/or nondifferentiable.
Volna E. (2008).
Learning and Evolution in Artificial Neural Networks: A Comparison Study.
In Proceedings of the 4th International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 10-17
DOI: 10.5220/0001506900100017
Copyright
c
SciTePress

2 NeuroEvolutionary Learning in Artificial Neural Networks
Evolutionary algorithms refer to a class of population-based stochastic search
algorithms that are developed from ideas and principles of natural evolution. They
include evolution strategies, evolutionary programming, genetic algorithms etc. [6].
One important feature of all these algorithms is their population based search strategy.
Individuals in a population compete and exchange information with each other in
order to perform certain tasks. Evolutionary algorithms are particularly useful for
dealing with large complex problems, which generate many local optima. They are
less likely to be trapped in local minima than traditional gradient-based search
algorithms. They do not depend on gradient information and thus are quite suitable
for problems where such information is unavailable or very costly to obtain or
estimate. They can even deal with problems where no explicit and/or exact objective
function is available. These features make them much more robust than many other
search algorithms. There is a good introduction to various evolutionary algorithms for
optimization in [6].
Evolution has been introduced into artificial neural networks at roughly three
different levels [7]: connection weights; architectures; and learning rules. The
evolution of connection weights introduces an adaptive and global approach to
training, especially in the reinforcement learning and recurrent network-learning
paradigm where gradient-based training algorithms often experience great difficulties.
The evolution of architectures enables artificial neural networks to adapt their
topologies to different tasks without human intervention and thus provides an
approach to automatic artificial neural network design as both connection weights and
structures can be evolved. The evolution of learning rules can be regarded as a
process of learning to learn in artificial neural networks where the adaptation of
learning rules is achieved through evolution. It can also be regarded as an adaptive
process of automatic discovery of novel learning rules.
The evolutionary approach to weight training in artificial neural networks consists
of two major phases. The first phase is to decide the representation of connection
weights, i.e., whether in the form of binary strings or real strings. The second one is
the evolutionary process simulated by an evolutionary algorithm, in which search
operators such as crossover and mutation have to be decided in conjunction with the
representation scheme. Different representations and search operators can lead to
quite different training performance. In a binary representation scheme, each
connection weight is represented by a number of bits with certain length. An artificial
neural network is encoded by concatenation of all the connection weights of the
network in the chromosome. The advantages of the binary representation lie in its
simplicity and generality. It is straightforward to apply classical crossover (such as
one-point or uniform crossover) and mutation to binary strings [6]. Real numbers
have been proposed to represent connection weights directly, i.e. one real number per
connection weight [6]. As connection weights are represented by real numbers, each
individual in an evolving population is then a real vector. Traditional binary crossover
and mutation can no longer be used directly. Special search operators have to be
designed. Montana and Davis [8] defined a large number of tailored genetic operators,
which incorporated many heuristics about training artificial neural networks. The idea
was to retain useful feature detectors formed around hidden nodes during evolution.
11

One of the problems faced by evolutionary training of artificial neural networks is
the permutation problem [7] also known as the competing convention problem. It is
caused by the many-to-one mapping from the representation (genotype) to the actual
artificial neural network (phenotype) since two artificial neural networks that order
their hidden nodes differently in their chromosomes will still be equivalent
functionally. In general, any permutation of the hidden nodes will produce
functionally equivalent artificial neural networks with different chromosome
representations. The permutation problem makes crossover operator very inefficient
and ineffective in producing good offspring. The role of crossover has been
controversial in neuroevolution as well as among the evolutionary computation
community in general. However, there have been successful applications using
crossover operations to evolve neural networks [9]. Compared with the mutation only
system, the performance of the system using crossover operations is in general better
and that it also helps to compress the overall size of search space faster.
3 Comparison between Evolutionary Training and
Gradient-based Training
The evolutionary training approach is attractive because it can handle the global
search problem better in a vast, complex, multimodal, and nondifferentiable surface.
It does not depend on gradient information of the error (or fitness) function and thus is
particularly appealing when this information is unavailable or very costly to obtain or
estimate. For example, the same evolutionary algorithms can be used to train many
different networks: recurrent artificial neural networks [10], higher order artificial
neural networks [11], and fuzzy artificial neural networks [12]. The general
applicability of the evolutionary approach saves a lot of human efforts in developing
different training algorithms for different types of artificial neural networks. The
evolutionary approach also makes it easier to generate artificial neural networks with
some special characteristics. For example, the artificial neural networks complexity
can be decreased and its generalization increased by including a complexity
(regularization) term in the fitness function. Unlike the case in gradient-based
training, this term does not need to be differentiable or even continuous. Weight
sharing and weight decay can also be incorporated into the fitness function easily.
However, evolutionary algorithms are generally much less sensitive to initial
conditions of training. They always search for a globally optimal solution, while a
gradient descent algorithm can only find a local optimum in a neighbourhood of the
initial solution.
4 Hybrid Training
Most evolutionary algorithms are rather inefficient in fine-tuned local search although
they are good at global search. This is especially true for genetic algorithms. The
efficiency of evolutionary training can be improved significantly by incorporating
a local search procedure into the evolution, i.e. combining evolutionary algorithm’s
12
global search ability with local search’s ability to fine tune. Evolutionary algorithms
can be used to locate a good region in the space and then a local search procedure is
used to find a near-optimal solution in this region. The local search algorithm could
be backpropagation [2] or other random search algorithms. Hybrid training has been
used successfully in many application areas: Lee [13] and many others used genetic
algorithms to search for a near-optimal set of initial connection weights and then used
backpropagation to perform local search from these initial weights. Their results
showed that the hybrid algorithm approach was more efficient than either the genetic
algorithm or backpropagation algorithm used alone. If we consider that
backpropagation often has to run several times in practice in order to find good
connection weights due to its sensitivity to initial conditions, the hybrid training
algorithm will be quite competitive. Similar work on the evolution of initial weights
has also been done on competitive learning neural networks [14] and Kohonen
networks [15].
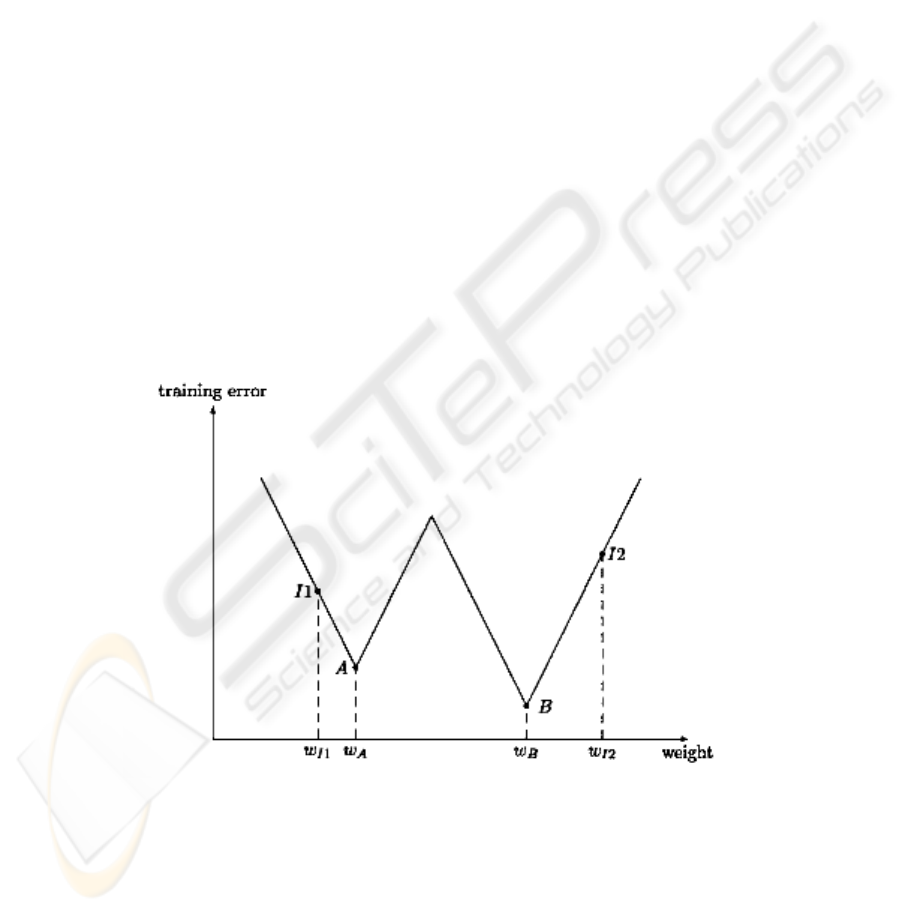
It is interesting to consider finding good initial weights as locating a good region in
the weight space. Defining that basin of attraction of a local minimum as being
composed of all the points, sets of weights in this case, which can converge to the
local minimum through a local search algorithm, then a global minimum can easily be
found by the local search algorithm if an evolutionary algorithm can locate a point,
i.e. a set of initial weights, in the basin of attraction of the global minimum. Fig. 1
illustrates a simple case where there is only one connection weight in the artificial
neural networks. If an evolutionary algorithm can find an initial weight such as w
I2
, it
would be easy for a local search algorithm to arrive at the globally optimal weight w
B
even though w
I2
itself is not as good as w
I1
.
Fig. 1. An illustration of using an evolutionary algorithm to find good initial weights such that
a local search algorithm can find the globally optimal weights easily. w
I2
in this figure is an
optimal initial weight because it can lead to the global optimum w
B
using a local search
algorithm.
13

5 Experiments
In order to test the efficiency of described algorithms, we applied it to the Iris flower
data set or Fisher's Iris data set is a multivariate data set introduced by Sir Ronald
Aylmer Fisher as an example of discriminated analysis [1]. It is sometimes called
Anderson's Iris data set because Edgar Anderson collected the data to quantify the
geographic variation of Iris flowers in the Gaspe Peninsula. The dataset consists of 50
samples from each of three species of Iris flowers (Iris setosa, Iris virginica and Iris
versicolor). Four features were measured from each sample, they are the length and
the width of sepal and petal. Based on the combination of the four features, Fisher
developed a linear discriminated model to determine which species they are (see
Table 1). There are three-layer feedforward neural networks with architecture
is 4 - 4 - 3 (e.g. four units in the input layer, four units in the hidden layer, and three
units in the output layer) in all experimental works, because the Fisher's Iris data set
[1] is not linearly separable and therefore we cannot use neural network without
hidden units. All nets are fully connected. The input values of the training set from the
Table 1 are transformed into interval <0; 1> to be use backpropagation algorithms for
adaptation.
Weight Evolution in Artificial Neural Networks: the initial population contains
30 individuals (weight representations of three-layer neural networks). There are
connection weights represented by real numbers in each chromosome. We use the
genetic algorithm with the following parameters: probability of mutation is 0,01 and
probability of crossover is 0,5. Adaptation of each neural network starts with
randomly generated weight values in the initial population.
The Gradient Descent adaptation deals through backpropagation with the
following parameters: learning rate is 0.4, momentum is 0.
The Hybrid Training combines parameters from genetic algorithms and
backpropagation. It makes one backpropagation epoch with probability 0,5 in each
generation.
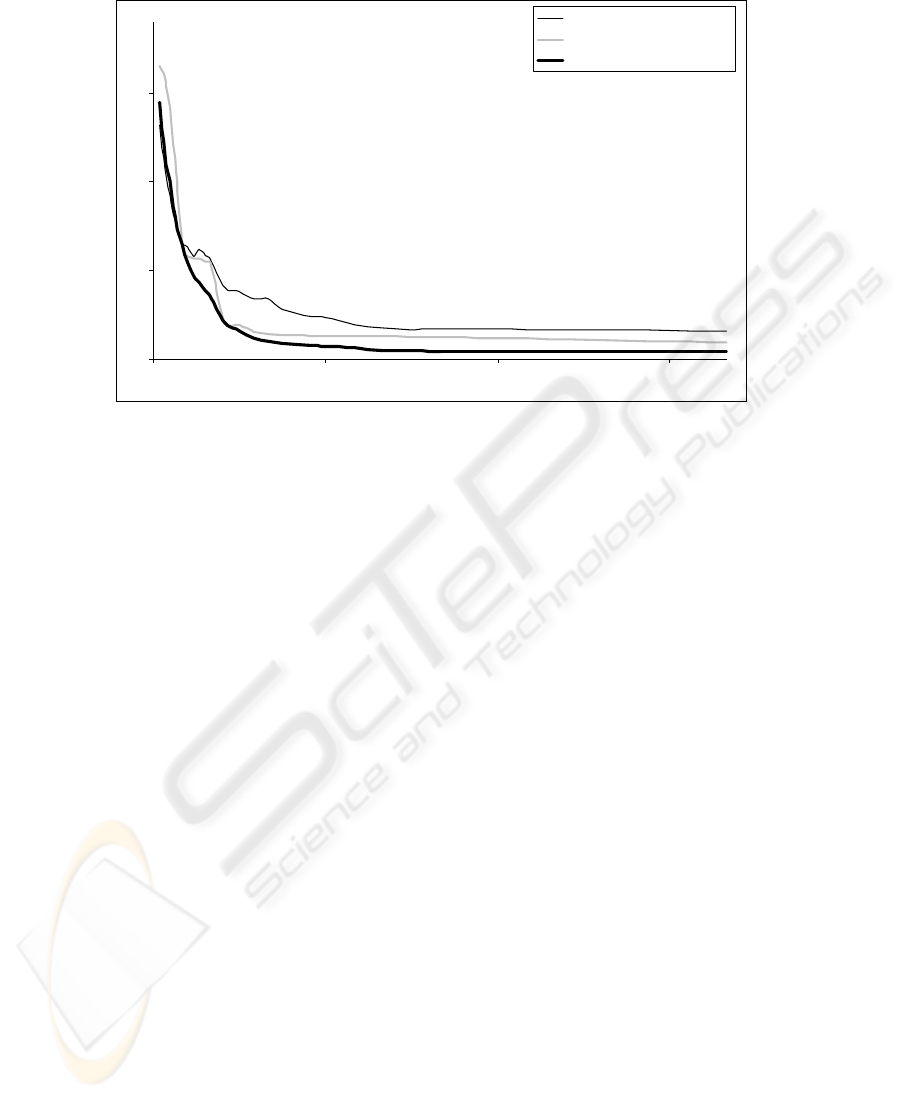
6 Conclusions
History of error functions is shown in the Figure 2. There are shown average values of
error functions in the given population. The “gradient descent adaptation” represents
an adaptation with the backpropagation. There are shown average values of error
functions, because the adaptation with backpropagation algorithm was applied 10
times for each calculation.
All networks solve Fisher's Iris data set [1] in our experiment. Now we can
compare results from all experiments, e.g. weight evolution, gradient descent
adaptation, and hybrid training. Other numerical simulations give very similar results.
If we can see from Figure 2, the hybrid training shows the best results from all of
them. In general, hybrid algorithms tend to perform better than others for a large
number of problems, because they combine evolutionary algorithm’s global search
ability with local search’s ability to fine tune
14
Table 1. The set of patterns (the Fisher's Iris Data training set), where Se means setosa,
Vi means virginica, and Ve means versicolor.
Sepal
Lengt
Sepal
Width
Petal
Length
Petal
Width
Spe-
cies
Sepal
Lengt
Sepal
Width
Petal
Length
Petal
Width
Spe-
cies
Sepal
Lengt
Sepal
Width
Petal
Length
Petal
Width
Spe-
cies
5,1 3,5 1,4 0,2
Se
6,3 3,3 6 2,5
Vi
7 3,2 4,7 1,4
Ve
4,9 3 1,4 0,2
Se
5,8 2,7 5,1 1,9
Vi
6,4 3,2 4,5 1,5
Ve
4,7 3,2 1,3 0,2
Se
7,1 3 5,9 2,1
Vi
6,9 3,1 4,9 1,5
Ve
4,6 3,1 1,5 0,2
Se
6,3 2,9 5,6 1,8
Vi
5,5 2,3 4 1,3
Ve
5 3,6 1,4 0,2
Se
6,5 3 5,8 2,2
Vi
6,5 2,8 4,6 1,5
Ve
5,4 3,9 1,7 0,4
Se
7,6 3 6,6 2,1
Vi
5,7 2,8 4,5 1,3
Ve
4,6 3,4 1,4 0,3
Se
4,9 2,5 4,5 1,7
Vi
6,3 3,3 4,7 1,6
Ve
5 3,4 1,5 0,2
Se
7,3 2,9 6,3 1,8
Vi
4,9 2,4 3,3 1
Ve
4,4 2,9 1,4 0,2
Se
6,7 2,5 5,8 1,8
Vi
6,6 2,9 4,6 1,3
Ve
4,9 3,1 1,5 0,1
Se
7,2 3,6 6,1 2,5
Vi
5,2 2,7 3,9 1,4
Ve
5,4 3,7 1,5 0,2
Se
6,5 3,2 5,1 2
Vi
5 2 3,5 1
Ve
4,8 3,4 1,6 0,2
Se
6,4 2,7 5,3 1,9
Vi
5,9 3 4,2 1,5
Ve
4,8 3 1,4 0,1
Se
6,8 3 5,5 2,1
Vi
6 2,2 4 1
Ve
4,3 3 1,1 0,1
Se
5,7 2,5 5 2
Vi
6,1 2,9 4,7 1,4
Ve
5,8 4 1,2 0,2
Se
5,8 2,8 5,1 2,4
Vi
6,7 3,1 4,4 1,4
Ve
5,7 4,4 1,5 0,4
Se
6,4 3,2 5,3 2,3
Vi
5,6 2,9 3,6 1,3
Ve
5,4 3,9 1,3 0,4
Se
6,5 3 5,5 1,8
Vi
5,6 3 4,5 1,5
Ve
5,1 3,5 1,4 0,3
Se
7,7 3,8 6,7 2,2
Vi
5,8 2,7 4,1 1
Ve
5,7 3,8 1,7 0,3
Se
7,7 2,6 6,9 2,3
Vi
5,6 2,5 3,9 1,1
Ve
5,1 3,8 1,5 0,3
Se
6 2,2 5 1,5
Vi
6,2 2,2 4,5 1,5
Ve
5,4 3,4 1,7 0,2
Se
6,9 3,2 5,7 2,3
Vi
5,9 3,2 4,8 1,8
Ve
5,1 3,7 1,5 0,4
Se
5,6 2,8 4,9 2
Vi
6,1 2,8 4 1,3
Ve
4,6 3,6 1 0,2
Se
7,7 2,8 6,7 2
Vi
6,3 2,5 4,9 1,5
Ve
5,1 3,3 1,7 0,5
Se
6,3 2,7 4,9 1,8
Vi
6,1 2,8 4,7 1,2
Ve
4,8 3,4 1,9 0,2
Se
6,7 3,3 5,7 2,1
Vi
6,4 2,9 4,3 1,3
Ve
5 3 1,6 0,2
Se
7,2 3,2 6 1,8
Vi
6,6 3 4,4 1,4
Ve
5 3,4 1,6 0,4
Se
6,2 2,8 4,8 1,8
Vi
6,8 2,8 4,8 1,4
Ve
5,2 3,5 1,5 0,2
Se
6,1 3 4,9 1,8
Vi
6,7 3 5 1,7
Ve
5,2 3,4 1,4 0,2
Se
6,4 2,8 5,6 2,1
Vi
6 2,9 4,5 1,5
Ve
4,7 3,2 1,6 0,2
Se
7,2 3 5,8 1,6
Vi
5,7 2,6 3,5 1
Ve
4,8 3,1 1,6 0,2
Se
7,4 2,8 6,1 1,9
Vi
5,5 2,4 3,8 1,1
Ve
5,4 3,4 1,5 0,4
Se
7,9 3,8 6,4 2
Vi
5,5 2,4 3,7 1
Ve
5,2 4,1 1,5 0,1
Se
6,4 2,8 5,6 2,2
Vi
5,8 2,7 3,9 1,2
Ve
5,5 4,2 1,4 0,2
Se
6,3 2,8 5,1 1,5
Vi
6 2,7 5,1 1,6
Ve
4,9 3,1 1,5 0,2
Se
6,1 2,6 5,6 1,4
Vi
5,4 3 4,5 1,5
Ve
5 3,2 1,2 0,2
Se
7,7 3 6,1 2,3
Vi
6 3,4 4,5 1,6
Ve
5,5 3,5 1,3 0,2
Se
6,3 3,4 5,6 2,4
Vi
6,7 3,1 4,7 1,5
Ve
4,9 3,6 1,4 0,1
Se
6,4 3,1 5,5 1,8
Vi
6,3 2,3 4,4 1,3
Ve
4,4 3 1,3 0,2
Se
6 3 4,8 1,8
Vi
5,6 3 4,1 1,3
Ve
5,1 3,4 1,5 0,2
Se
6,9 3,1 5,4 2,1
Vi
5,5 2,5 4 1,3
Ve
5 3,5 1,3 0,3
Se
6,7 3,1 5,6 2,4
Vi
5,5 2,6 4,4 1,2
Ve
4,5 2,3 1,3 0,3
Se
6,9 3,1 5,1 2,3
Vi
6,1 3 4,6 1,4
Ve
4,4 3,2 1,3 0,2
Se
5,8 2,7 5,1 1,9
Vi
5,8 2,6 4 1,2
Ve
5 3,5 1,6 0,6
Se
6,8 3,2 5,9 2,3
Vi
5 2,3 3,3 1
Ve
5,1 3,8 1,9 0,4
Se
6,7 3,3 5,7 2,5
Vi
5,6 2,7 4,2 1,3
Ve
4,8 3 1,4 0,3
Se
6,7 3 5,2 2,3
Vi
5,7 3 4,2 1,2
Ve
5,1 3,8 1,6 0,2
Se
6,3 2,5 5 1,9
Vi
5,7 2,9 4,2 1,3
Ve
4,6 3,2 1,4 0,2
Se
6,5 3 5,2 2
Vi
6,2 2,9 4,3 1,3
Ve
5,3 3,7 1,5 0,2
Se
6,2 3,4 5,4 2,3
Vi
5,1 2,5 3 1,1
Ve
5 3,3 1,4 0,2
Se
5,9 3 5,1 1,8
Vi
5,7 2,8 4,1 1,3
Ve
15
0
5
10
15
0 300 600 900
evolution
gradient descent adaptation
hybrid training
tim e
Error
Fig. 2. The error function history.
References
1. http://en.wikipedia.org/wiki/Iris_flower_data_set (from 16/1/2008)
2. Hertz, J., Krogh, A., and Palmer, R. Introduction to the Theory of Neural Computation.
Reading, MA: Addison-Wesley, 1991.
3. Lang, K. J. Waibel, A. H., and Hinton, G. E.“A time-delay neural network architecture for
isolated word recognition,” Neural Networks, vol. 3, no. 1, pp. 33–43, 1990.
4. Fels S. S. and Hinton, G. E. “Glove-talk: A neural network interface between a data-glove
and a speech synthesizer,” IEEE Trans. Neural Networks, vol. 4, pp. 2–8, Jan. 1993.
5. Knerr, S., Personnaz, L., and G. Dreyfus, “Handwritten digit recognition by neural
networks with single-layer training,” IEEE Trans, Neural Networks, vol. 3, pp. 962–968,
Nov. 1992, neural networks that uses genetic-algorithm techniques.”
6. Bäck, T., Hammel, U., and Schwefel, H.-P. “Evolutionary computation: Comments on the
history and current state”. IEEE Trans, Evolutionary Computation, vol. 1, pp. 3–17, Apr. 1997.
7. Yao, X. “Evolving artificial neural networks”, In Proceedings of the IEEE 89 (9) 1423-1447,
1999.
8. Montana, D., and Davis, L. “Training feedforward neural networks using genetic
algorithms.” In Proceedings 11th Int. Joint Conf. Artificial Intelligence, pp. 762–767San
Mateo, CA: Morgan Kaufmann, 1989.
9. Pujol, J. C. F. and Poli, R. Evolving the topology and the weights of neural networks using
a dual representation, Applied Intelligence, 8(1):73–84, 1998.
10. Angeline, P. J., Saunders, G, M., and Pollack, J. B. An evolutionary algorithm that
constructs recurrent neural networks, IEEE Transactions on Neural Networks, pages 54–65,
1994.
11. Janson D. J. and Frenzel, J. F. “Application of genetic algorithms to the training of higher
order neural networks,” J, Syst, Eng., vol. 2, pp. 272–276, 1992.
16

12. Lehotsky, M. Olej, V. and Chmurny, J. “Pattern recognition based on the fuzzy neural
networks and their learning by modified genetic algorithms,” Neural Network World, vol.
5, no. 1, pp. 91–97, 1995.
13. Lee, S.-W. “Off-line recognition of totally unconstrained handwritten numerals using
multilayer cluster neural network,” IEEE Trans. Pattern Anal. Machine Intell., vol. 18, pp.
648–652, June 1996.
14. Merelo, J. J. Paton, M. Canas, A., Prieto, A. and Moran, F. “Optimization of a competitive
learning neural network by genetic algorithms,” in Proc. Int. Workshop Artificial Neural
Networks (IWANN’93), Lecture Notes in Computer Science, vol. 686, Berlin, Germany:
Springer-Verlag, 1993, pp. 185–192.
15. Wang, D. D. and Xu, J. “Fault detection based on evolving LVQ neural networks,” in Proc.
1996 IEEE Int. Conf. Systems, Man and Cybernetics, vol. 1, pp. 255–260.
17
