
(A) VISION FOR 2050
The Road Towards Image Understanding for a Human-Robot Soccer Match
Udo Frese
Deutsches Forschungszentrum f¨ur K¨unstliche Intelligenz (DFKI), 28359 Bremen, Germany
Tim Laue
SFB/TR 8 Spatial Cognition, Faculty 3 - Mathematics and Computer Science, Universit¨at Bremen, 28359 Bremen, Germany
Keywords:
Vision, Recognition, Image Processing, State Estimation, Sensor Fusion, Robot Soccer, Sport Robotics.
Abstract:
We believe it is possible to create the visual subsystem needed for the RoboCup 2050 challenge – a soccer
match between humans and robots – within the next decade. In this position paper, we argue, that the basic
techniques are available, but the main challenge will be to achieve the necessary robustness. We propose to
address this challenge through the use of probabilistically modeled context, so for instance a visually indistinct
circle is accepted as the ball, if it fits well with the ball’s motion model and vice versa.
Our vision is accompanied by a sequence of (partially already conducted) experiments for its verification. In
these experiments, a human soccer player carries a helmet with a camera and an inertial sensor and the vision
system has to extract all information from that data, a humanoid robot would need to take the human’s place.
1 INTRODUCTION
Soon after establishing the RoboCup competition in
1997, the RoboCup Federation proclaimed an ambi-
tious long term goal.
“By mid-21st century, a team of fully au-
tonomoushumanoidrobot soccer players shall
win the soccer game, comply with the offi-
cial rule of the FIFA, against the winner of the
most recent World Cup.”
Kitano and Asada (1998)
Currently, RoboCup competitions take place ev-
ery year. Within a defined set of different sub-
competitions and leagues, incremental steps towards
this big goal are made (RoboCup Federation, 2008).
Although, a rapid and remarkable progress has been
observed during the first decade of these robot com-
petitions, it is not obvious, if and how the final goal
will be reached. There exist rough roadmaps, e.g. by
Burkhard et al. (2002), but in many research areas,
huge gaps must be bridged within the next 40 years.
While this is obvious for several areas, e.g. actu-
ator design and control, we claim that the situation is
surprisingly positive for vision:
Within the next decade, it will be possible to
develop a vision system that is able to pro-
vide all environmental information necessary
to play soccer on a human level.
Annual RoboCup competitions are always bound to
strict rule sets (defined for the state of the art of
the competing robots) and demand competitive robot
teams. Thus only incremental progress adapting to
actual rule changes (which continuously rise the level
of complexity) is fostered. By developing the afore-
mentioned vision system independently of these com-
petitions, we hope to set a new landmark which could
guide the incremental development.
Because a real human level soccer robot will not
be available for a long time, our vision is accompa-
nied by a (partially already conducted) set of experi-
ments that verify our claim without needing a robot.
This paper is organized as follows: Section 2
roughly identifies the challenges for playing robot
soccer and compares them to the state of the art in
robotics. In Sect. 3 we explain, why the basic tech-
niques for the vision system are available. We argue,
why the remaining challenge is robustness, for which
we present our idea of a solution in Sect. 4. Finally,
a sequence of experiments to verify our claim is de-
scribed in Sect. 5.
317
Frese U. and Laue T. (2008).
(A) VISION FOR 2050 - The Road Towards Image Understanding for a Human-Robot Soccer Match.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 317-322
DOI: 10.5220/0001506803170322
Copyright
c
SciTePress
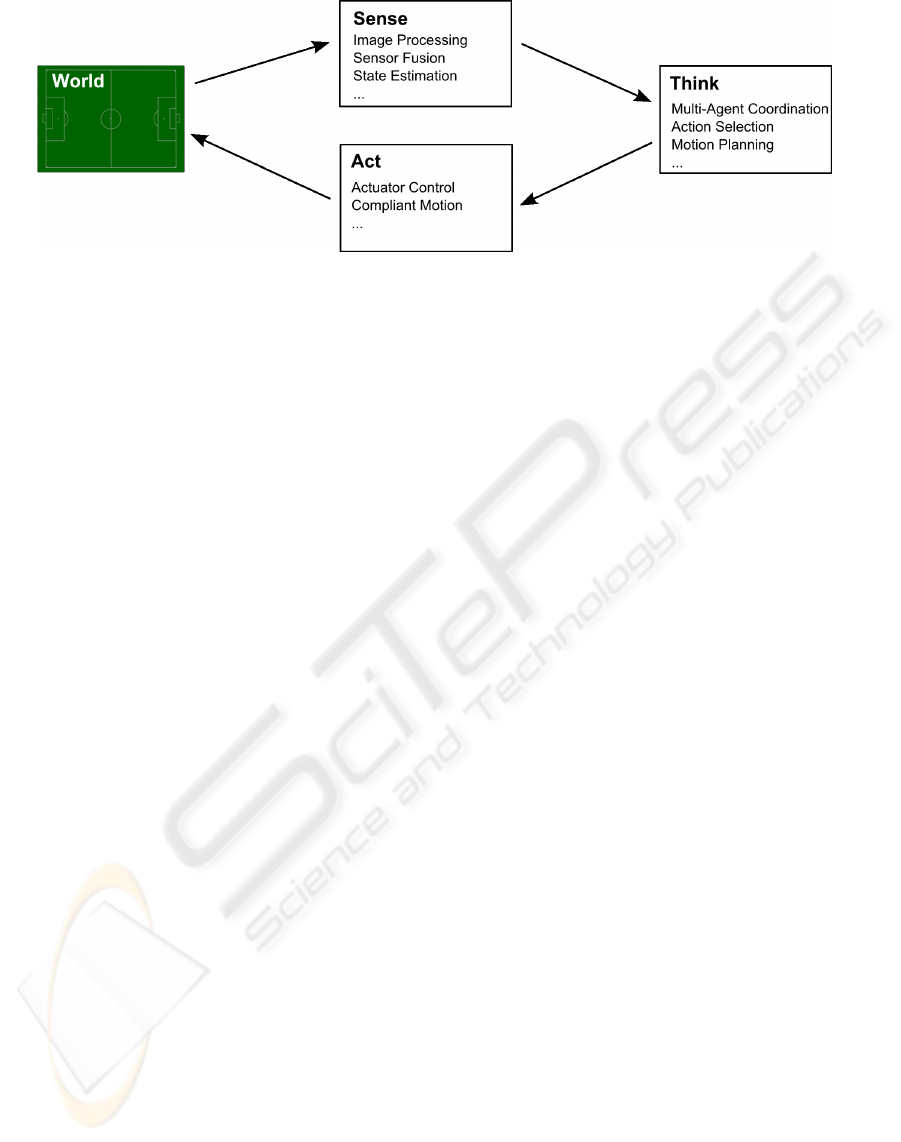
Figure 1: The Sense-Think-Act cycle roughly depicting major tasks for playing soccer with a humanoid robot.
2 CHALLENGES FOR PLAYING
SOCCER
The global task of playing soccer consists of several
different, interdepending challenges. We roughly cat-
egorize them according to the Sense-Think-Act cy-
cle (see Fig.1). This should be considered as a possi-
ble architecture for illustration. In the following, the
challenges are described in reverted order but with de-
creasing degree of difficulty.
2.1 Challenges for Actuation
The hugest obvious gap may be observed in the field
of actuation. Nowadays, the probably most advanced
humanoid robot, Honda’s ASIMO, is capable of run-
ning at a top speed of six kilometers per hour (Honda
Worldwide Site, 2007). This is an impressive result,
but still more than five times slower than the top speed
of a human soccer player. A similar gap regarding
kicking velocity has been pointed out by Haddadin
et al. (2007). They showed that a state-of-the-art
robot arm (with a configuration comparable to a hu-
man leg) is six times slower than required to acceler-
ate a standard soccer ball to an adequate velocity. It is
still an open issue, whether today’s motor technology
could be developed further on enough, or if more effi-
cient actuators, e.g. artificial muscles, will be needed.
Since soccer is a contact sport leading to physical
human-robot interaction (Haddadin et al., 2007), not
only direct position control but also approaches for
compliant motion, such as impedence control, need
to be taken into account.
Additionally, the problems of energy efficency
and power supply need to be solved. The ASIMO
robot for example is, according to Honda Worldwide
Site (2007), capable of walking (with a speed of less
than three kilometers per hour) for 40 minutes.
2.2 Challenges for Thinking
In this area, two different aspects may be distin-
guished: motion planning and high-level multi-agent
coordination. The latter is a research topic in the
RoboCup Soccer Simulation League since a while
and has reached a remarkable level. Dealing with
the offside rule as well as playing one-two passes are
standard behaviors, complex group tasks as playing
keepaway soccer serve as a testbed for learning algo-
rithms (Stone et al., 2005). This area could be consid-
ered to be already quite close to human capabilities.
On the other hand, when playing with real hu-
manoid robots, sophisticated methods for motion
planning are needed. The current research frontier on
humanoid motion control is balancing and dynamic
foot placement for walking robots. Algorithms for
full-body motion planning exist (Kuffner et al., 2002),
but are subject to restrictions that make them inappli-
cable to tasks as playing soccer.
Here is a big gap to human level soccer. As an
example consider volley-kicking. The player has to
hit the ball exactly at the right time, position, and ve-
locity, with a motion compatible to the step pattern,
allowing balancing and considering opponents. Last
but not least, all this must happen in real-time.
2.3 Challenges for Sensing
According to Kitano and Asada (1998), it is evident
that the robots’ sensorial capabilities should resemble
the human ones. Thus, we could assume to deal with
data from cameras and inertial sensors emulating the
human eyes and vestibular system. The required in-
formation are estimates of the own position and the
positions of the ball and of other players. In case of
tackles or dribbling, the latter will be needed to be
recognized in more detail (e.g. the positions of the
feet and limbs).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
318

Current solutions for these tasks and our idea how
to bridge the remaining gap are presented in the fol-
lowing section.
3 THE VISION SYSTEM
Our main thesis is that the “sense” part of the
RoboCup 2050 challenge can be realized within a
decade starting from the current state of the art in
computer vision. This is remarkable, since the “act”
and “think” parts are apparently lightyears away from
reaching human level performance and for computer
vision in general, this is also true. The reason, why we
believe such a vision system can be realized, is, that
unlike a household robot for instance, a soccer robot
faces a rather structured environment.
3.1 State of the Art
The objects relevant in a soccer match are the ball,
the goals, the line markings and of course the players.
Ball, goal and line markings are geometrical features,
i.e. circles and lines. There is a large number of algo-
rithms for detecting them in images, from the classi-
cal Hough transform (Davies, 2004) up to a range of
more elaborate methods (Guru and Shekar, 2004).
Recognizing other players is more challenging. It
is particularly difficult because we will probably need
not only the general position but the detailed state
of motion for close range tackling and to infer the
player’s action for tactical purposes. Fortunately, peo-
ple tracking is an important topic in computer vision
with a large body of literature (Price, 2008; Ramanan
and Forsyth, 2003).
Furthermore, soccer scenes are lightly colored
with green lawn and the players wearing colored
clothes of high contrast. In the RoboCup competition,
this idea is taken to an extreme, where most teams
rely on color segmentation on a pixel-per-pixel basis
as their primary vision engine. This will not be pos-
sible for real-world soccer, mainly due to changing
lighting conditions. Still color can provide a valuable
additional cue, at least when looking below the hori-
zon, where objects are in front of green lawn.
The background above the horizon, including the
stadium and the audience is of course also visible and
unfortunately rather undefined. However, if it is rele-
vant for the soccer robot at all, then not for recogni-
tion, but only in the sense of a general landmark. For
this purpose there are nowadays well working tech-
niques, such as the Scale Invariant Feature Transform
(SIFT) (Lowe, 2004).
Overall, understanding a soccer scene from the
player’s perspective seems much easier then for in-
stance understanding an arbitrary household, traffic
or outdoor scene. Indeed there are already half-
automatic systems in the related area of TV soccer
scene analysis, for example the ASPOGAMO system
by Beetz et al. (2006, 2007) proofing that soccer scene
understanding in general is on the edge of being func-
tional.
3.2 Open Problems
So, is a vision system for the RoboCup 2050 chal-
lenge an easy task? We believe it is not. It is sur-
prisingly a realistic task but well beyond the current
state of the art. The first problem is, that the camera is
moving along with the head of the humanoid soccer
robot. To predict a flying ball, the orientation of the
camera must be known very precisely. It seems un-
realistic that the necessary precision can be obtained
from the robot’s forward kinematic, since unlike an
industrial robot, a humanoid robot is not fixed to the
ground. So our solution is to integrate an inertial
sensor with the camera and fuse the complementary
measurements of both sensors in a probabilistic least-
square framework.
The second problem is the player’s perspective. It
is much more difficult than the overview perspective
used in TV soccer scene analysis. In the TV perspec-
tive the scale of an object in the image varies by a
factor of about 3 (Beetz et al., 2006, Fig. 5) whereas
in the player’s perspective it can vary by a factor of
250 assuming the distance to an object ranging from
0.5m to 125m. Hence, for instance the people de-
tection algorithm must handle both extreme cases, a
person only the size of a few pixels, where an arm
or a leg maybe thinner than a single pixel and a per-
son much larger than the camera’s field of view, only
partially visible. Furthermore, in an image from the
player’s perspective, other players will extend beyond
the green lawn of the field into the general back-
ground. Hence it is not possible to search for non-
green blobs as an easy first processing step. This can
also happen for a flying ball, which is then particu-
larly difficult to detect.
However, the third and most severe problem is,
that from our experience, most of the academic com-
puter vision systems perform on the level of lab
demonstrators requiring nicely setup scenes and light-
ing conditions and usually considerable parameter
tweaking. So, to summarize, for the vision part of the
RoboCup 2050 challenge, we do not need a new level
of functionality as for many other grand challenges,
but we need a new level of robustness.
(A) VISION FOR 2050 - The Road Towards Image Understanding for a Human-Robot Soccer Match
319
4 ROBUSTNESS THROUGH
CONTEXT
We propose to address the question of robustness by
utilizing probabilistically modeled context informa-
tion, formulating the overall scene understanding and
prediction problem as a global likelihood optimiza-
tion task. This idea in general is not entirely new (Ull-
man, 1995; Binnig, 2004; Leibe et al., 2007), but we
believe it is particularly well suited to this task and
also the task is well suited to study this methodology.
4.1 Data-Driven Bottom-Up Processing
Most current vision systems use a data-drivenbottom-
up approach (Frese et al., 2001; R¨ofer et al., 2005;
Beetz et al., 2007, as examples). Usually, low level
features are extracted from the image and then aggre-
gated through several stages to high level information.
Each stage may incorporate some background know-
ledge at its particular level but does not take informa-
tion from higher levels into account. It simply takes
some input from the previous lower level and passes
the result of the computation to the next higher level.
As an example, a classical Hough transform starts
by classifying pixels as edge or not by thresholding
the result for instance of a Sobel filter. Similar the
system by Beetz et al. starts by classifying pixels as
lawn or not on the basis of their color. This is a hard
decision taken on the lowest level without any higher
level knowledge, such as the fact that we are looking
for a ball or the ball’s motion model. Such a pixel-
wise classification can be very ambiguous. Often we
could, for instance, classify a borderline pixel cor-
rectly as belonging to the ball, although it looks rather
greenish, if we considered the context of the ball or its
motion model. However, in conventional vision sys-
tems, on the low level this knowledge does not exist
and on the higher level, the fact, that this pixel was
borderline in the classification, is lost due to commit-
ting to a hard decision on the lower level.
4.2 Global Likelihood Optimization
We believe, that much of the brittleness of current vi-
sion systems originates from this phenomenon. So
our approach for increased robustness is an overall
likelihood optimization. In the example above, the
variables to be optimized would be the 2D image cir-
cle (center, radius) and the 3D position and velocity
of the ball over time. The likelihood would be the
product of the following likelihoods for all images:
1. a motion model likelihood binding the 3D posi-
tions and velocities over time;
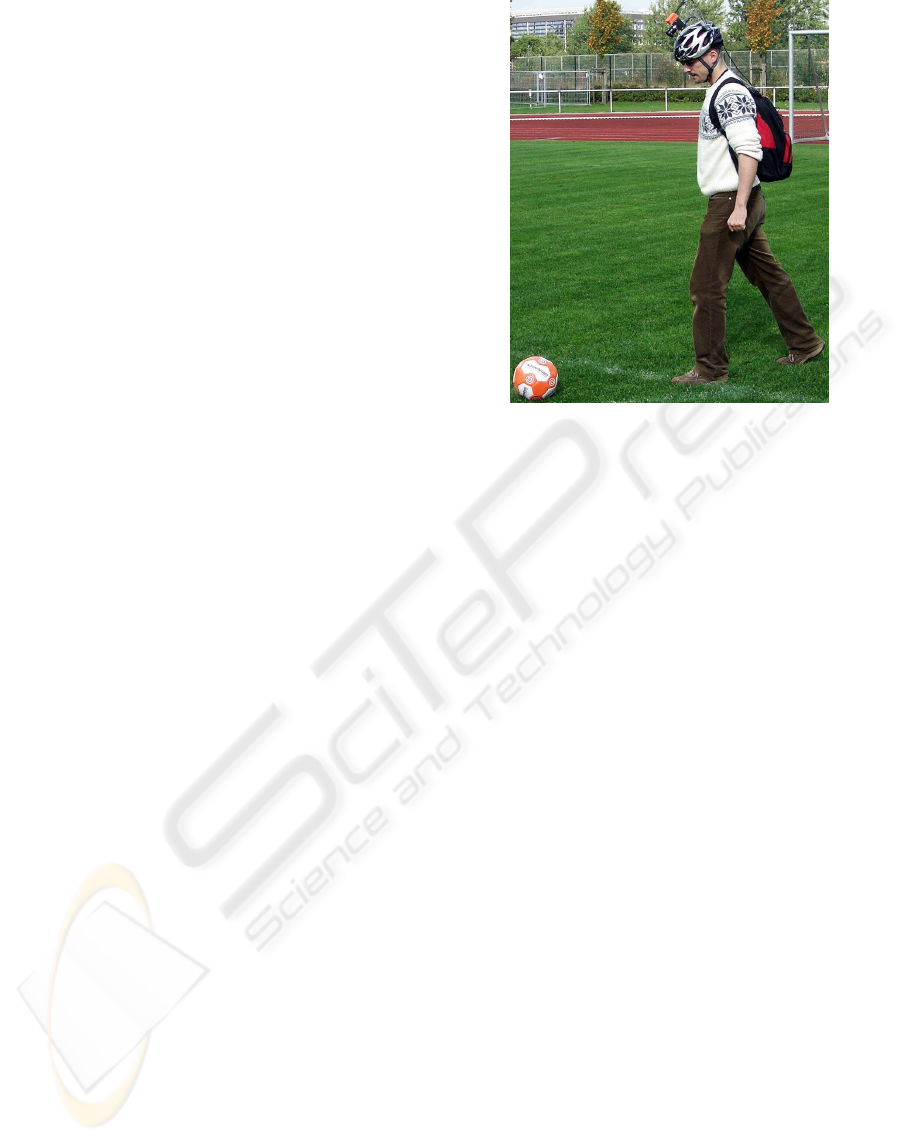
Figure 2: Our proposed experiment: Mount a camera and
an inertial sensor on the head of a human soccer player and
use them to extract all the information, a humanoid soccer
robot would need to take the human’s place.
2. a camera model likelihood binding 2D circles to
3D positions;
3. a circle edge likelihood, indicating how much
contrast there is in the image along the outline of
the hypothesized 2D circle;
4. a circle color likelihood, indicating how well the
color inside the 2D circle corresponds to the ball.
The first two factors are Gaussians expressing the
models as formulas with uncertainty (Birbach, 2008).
The last two look directly into the image for a specific
circle, returning a gradual result. In this approach, an
indistinct ball would get a lower likelihood in 3. and
4. but this could be compensated by 1. and 2. if it fits
well to the context of a flying ball.
The problem is understanding an image sequence,
i.e. estimating over time. Indeed, successive images
are linked by a motion model and this provides most
of the context we want to build upon. However, we
propose not to use incremental filters, such as EKF
or a particle filter, but to look back into the raw im-
ages of the last few seconds at least. This approach
has surprising advantages. Imagine the ball is kicked,
but during the first 100ms there is too little contrast to
the background so it is not detected. Now when it is
detected, there is new information on where the ball
has been before from the ball’s motion model. The
old images are still in memory and tracking the ball
back in time is much less ambiguous than finding the
ball without context and will probably succeed. Para-
doxically, once the system has detected the ball it has
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
320
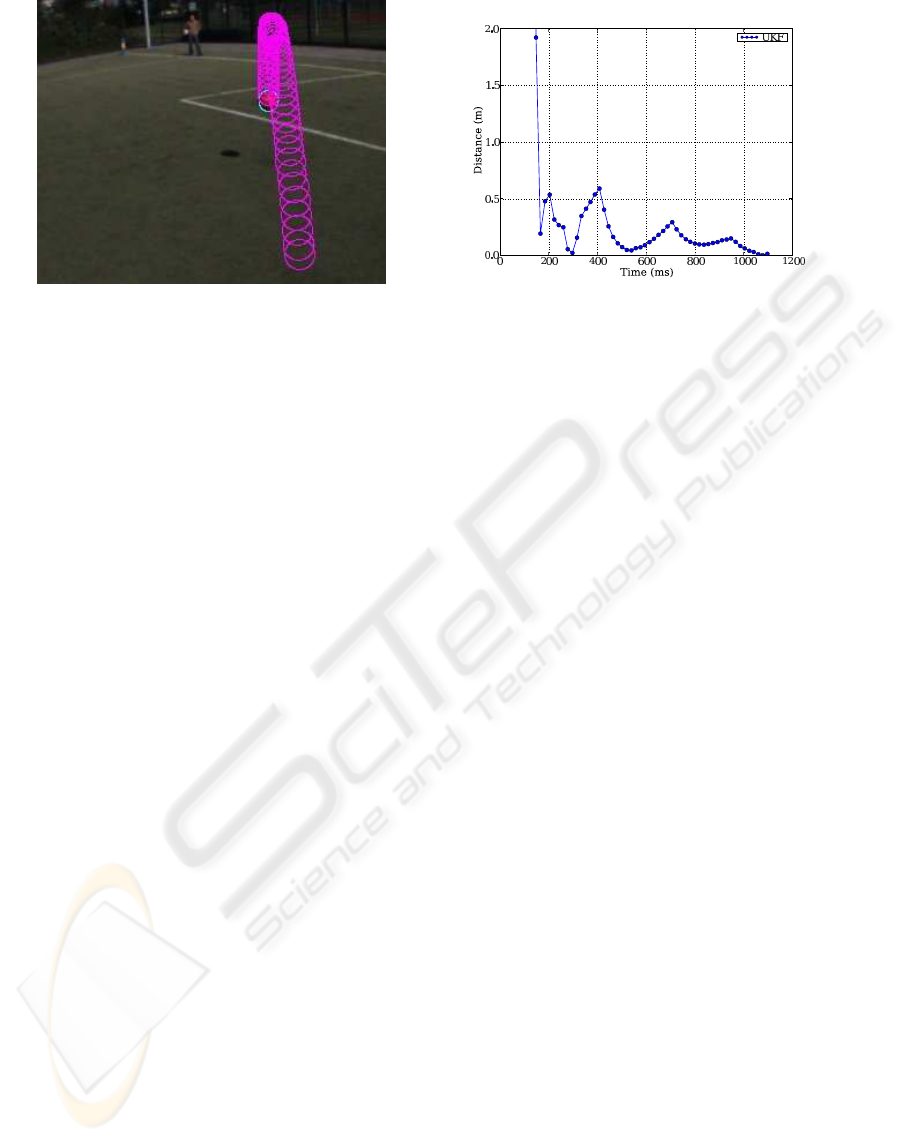
Figure 3: Predicting the trajectory of a flying ball from a moving camera-inertial system. As an initial study, the ball, the lines
and the goal corners have been manually extracted from the images. From this data, the trajectory of the ball is predicted
(left). The right plot shows the error of the predicted touch down point varying over time. It shows, even though the camera
is moving, the prediction is roughly precise enough for interception. See
http://www.sport-robotics.com/icinco/
.
already observed it for 100ms. The first prediction is
not delayed at all, because prior to that the ball must
have been observed for some time anyway.
Overall, we believe that the approach of a global
likelihood optimization directly in the images is an
elegant way to greatly increase robustness.
5 PROPOSED EXPERIMENTS
For a vision to become reality, realistic intermediate
steps are necessary. It would not help, if we build a
vision system now but then had to wait until a hu-
man level soccer robot is available. So we propose
a sequence of experiments, that, without a humanoid
robot, ultimately allows to verify that the proposed
system is appropriate for human level soccer (Fig.2).
5.1 Helmet Camera with Inertial Sensor
The basic idea is to let a human soccer player wear a
helmet with a camera and an inertial sensor and verify,
that the information extracted by the vision system
from the sensor data, would allow a humanoid robot
to take the human’s place.
As a first experiment we propose to record data
from a soccer match and run the vision system on that
data offline. Since it is hard to obtain ground-truth
data, we would use our expert’s judgment to asses,
whether the result would be enough for a humanoid
robot to play soccer. It is very advantageous to work
on recorded data allowing to reproduce results for de-
bugging and analysis and to run the system even if its
still not real-time. Overall, it allows to first concen-
trate on functionality and robustness instead of com-
putational efficiency and technical integration.
We have already conducted a very first experi-
ment (Kurlbaum, 2007; Birbach, 2008), where the
ball and the field lines are manually extracted from
the recorded images (available on request). The ball’s
trajectory is predicted by least-square estimation us-
ing the likelihood functions 1. and 2., as well as cor-
responding equations for how the inertial sensor ob-
serves the free motion of the camera (Fig.3). The re-
sults indicate, that if the ball can be detected in the
image with about one pixel precision, the prediction
would be precise enough. We believe that this kind of
studies which deliberately discard essential aspects,
such as integration, real-time computation, or auton-
omy are undervalued by the community who favors
full system approaches. But even from a full system
perspective, it is much more valuable to obtain an ex-
tensive result on a subsystem which then can guide
the full system design than to do another increment
on a full system.
5.2 Motion Capture Suit
Departing from the experiment above, one might ask
whether more sensors are needed than just camera and
inertial. Both human and humanoid robot can derive
their own motion from the joint angles. This provides
the horizontal motion (odometry) and the height over
ground. The horizontal motion facilitates localization
and the height derived from vision is much less pre-
cise. Indeed, we experienced that the uncertain height
is a major part of the error in Fig. 3.
An intriguing idea is to equip the human player
with a tracker-less motion capture suit (Xsens Tech-
nologies B.V., 2007) measuring joint angles. Apart
from providing the kinematic information discussed
above, it also provides the trajectory of both feet. If
(A) VISION FOR 2050 - The Road Towards Image Understanding for a Human-Robot Soccer Match
321

the player hits the ball, one can compare the predicted
ball trajectory with the real foot trajectory and evalu-
ate the precision. This is important since ground truth
is not available.
5.3 Virtual Reality Display
The experiments above have the drawback that they
are evaluated by an expert looking at the vision sys-
tem’s output. The most direct proof that this is all
you need for playing soccer would be to give a hu-
man just that output via a head mounted display and
see whether s/he can play.
The approach is of course fascinating and direct,
but we have some concerns regardingsafety. Anyway,
this experiment becomes relevant only after we are
convinced in principle, that the system is feasible. So
this is something to worry about later.
6 CONCLUSIONS
In this position paper, we have outlined the road to a
vision system for a human-robot soccer match. We
claim that, since soccer is a rather structured environ-
ment, the basic techniques are available and the goal
could be reached within a decade. The main challenge
will be robustness, which we propose to address by
optimizing a global likelihood function working on a
history of raw images. We have outlined a sequence
of experiments to evaluate such a vision system with
data from a camera-inertial system mounted on the
head of a human soccer player.
The reason, we are confident such a system can
be realized within a decade is the insight that it does
not need general common-sense-reasoning AI. This
is good news for the RoboCup 2050 challenge. But
it suggests that, even when we meet that challenge, it
does not imply we have realized the dream of a think-
ing machine, the whole challenge had started with.
That would not be the first time.
REFERENCES
Beetz, M., Gedikli, S., Bandouch, J., Kirchlechner, B.,
v. Hoyningen-Huene, N., and Perzylo, A. (2007). Vi-
sually tracking football games based on tv broadcasts.
IJCAI 2007, Proceedings of the 20th International Joint
Conference on Artificial Intelligence, Hyderabad, India.
Beetz, M., v. Hoyningen-Huene, N., Bandouch, J., Kirch-
lechner, B., Gedikli, S., and Maldonado, A. (2006).
Camerabased observation of football games for analyz-
ing multiagent activities. In International Conference on
Autonomous Agents.
Binnig, G. (2004). Cellenger automated high content anal-
ysis of biomedical imagery.
Birbach, O. (2008). Accuracy analysis of camera-inertial
sensor based ball trajectory prediction. Master’s thesis,
Universit¨at Bremen, Mathematik und Informatik.
Burkhard, H.-D., Duhaut, D., Fujita, M., Lima, P., Murphy,
R., and Rojas, R. (2002). The Road to RoboCup 2050.
IEEE Robotics and Automation Magazine, 9(2):31–38.
Davies, E. R. (2004). Machine Vision. Theory, Algorithms,
Practicalities. Morgan Kauffmann.
Frese, U., B¨auml, B., Haidacher, S., Schreiber, G., Schae-
fer, I., H¨ahnle, M., and Hirzinger, G. (2001). Off-the-
shelf vision for a robotic ball catcher. In Proceedings
of the IEEE/RSJ International Conference on Intelligent
Robots and Systems, Maui, pages 1623 – 1629.
Guru, D. and Shekar, B. (2004). A simple and robust line
detection algorithm based on small eigenvalue analysis.
Pattern Recognition Letters, 25(1):1–13.
Haddadin, S., Laue, T., Frese, U., and Hirzinger, G. (2007).
Foul 2050: Thoughts on Physical Interaction in Human-
Robot Soccer. In Proceedings of the IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems.
Honda Worldwide Site (2007). Honda World Wide —
Asimo. http://world.honda.com/ASIMO/.
Kitano, H. and Asada, M. (1998). RoboCup Humanoid
Challenge: That’s One Small Step for A Robot, One Gi-
ant Leap for Mankind. In International Conference on
Intelligent Robots and Systems, Victoria, pages 419–424.
Kuffner, J. J., Kagami, S., Nishiwaki, K., Inaba, M., and
Inoue, H. (2002). Dynamically-stable Motion Planning
for Humanoid Robots. Auton. Robots, 12(1):105–118.
Kurlbaum, J. (2007). Verfolgung von ballflugbahnen mit
einem frei beweglichen kamera-inertialsensor. Master’s
thesis, Universit¨at Bremen, Mathematik und Informatik.
Leibe, B., Cornelis, N., Cornelis, K., and Gool, L. V.
(2007). Dynamic 3D Scene Analysis from a Moving
Vehicle. In IEEE Conference on Computer Vision and
Pattern Recognition.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Computer
Vision, 60(2):91 – 110.
Price, K. (2008). The annotated computer vision bibliogra-
phy. http://www.visionbib.com/.
Ramanan, D. and Forsyth, D. (2003). Finding and track-
ing people from the bottom up. In IEEE Conference on
Computer Vision and Pattern Recognition.
RoboCup Federation (2008). RoboCup Official Site.
http://www.robocup.org.
R¨ofer, T. et al. (2005). GermanTeam RoboCup 2005.
http://www.germanteam.org/GT2005.pdf.
Stone, P., Sutton, R. S., and Kuhlmann, G. (2005). Re-
inforcement Learning for RoboCup-Soccer Keepaway.
Adaptive Behavior, 13(3):165–188.
Ullman, S. (1995). Sequence seeking and counter streams:
A computational model for bidirectional information
flow in the visual cortex. Cerebral Cortex, 5(1):1–11.
Xsens Technologies B.V. (2007). Moven, Inertial Motion
Capture, Product Leaflet. XSens Technologies.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
322
