
FROM CAD MODEL TO HUMAN-SCALE MULTIMODAL
INTERACTION WITH VIRTUAL MOCK-UP
An Automotive Application
Damien Chamaret, Paul Richard and Jean-Louis Ferrier
Laboratoire d’Ingénierie des Systèmes Automatisés (LISA), Université d’Angers
62 Avenue Notre Dame du Lac, 49000 Angers, France
Keywords: Virtual environment, human-scale, multimodal interaction, CAD model, virtual mock-up.
Abstract: This paper presents and validates a new methodology for the efficient integration of CAD models in a
physical-based virtual reality simulation. User interacts with virtual mock-up using a string-based haptic
interface that may provides haptic sensation to both hands in a large workspace. Visual and tactile displays
provide users with sensory feedback and improve both user performance and immersion. Stereoscopic
images are displayed on a 2m x 2.5m retro-projected screen and viewed using polarized glasses. The
proposed methodology implemented in a low-cost system, has been tested with an automotive application
task. However, the presented approach is general enough to be applicable to a large variety of industrial
applications.
1 INTRODUCTION
Most research on virtual environments dedicated to
Computer Aided Design (CAD) application are
confronted to difficult problems related for instance
to real-time 3D simulation including physics,
integration of multisensorial feedbacks, etc. Another
problem to overcome is the transformation CAD
models to virtual reality (VR) models.
In this paper we present and validate a new
methodology for an efficient integration of CAD
models in a physical-based virtual reality simulation
that provides the user with multimodal feedback.
Haptic interaction is based on the SPIDAR system
illustrated in Figure 1 (Bouguila et al. 2000). The
methodology has been tested with an automotive
application task. However, the presented approach is
general enough to be applicable to other tasks and
industrial applications requiring realistic interaction.
2 RELATED WORK
2.1 Visuo-haptic VR Configuration
Projection-based Virtual Environments such as
CAVEs™ (Cruz-Neira et al., 1993) Workbenches
(Krueger and Froehlich, 1994) or immersive wall
(Richard et al., 2006) are the most popular VR
configurations. They provide a large number of
performance/immersion factors like stereoscopic
visualization, large screens, large manipulation
space, etc. However, adding force feedback to these
configurations without degrading their
performance/immersion factors is not an easy task.
Most general purpose haptic devices, like the
PHANToM (Massie and Salisbury, 1994) are often
used with desktop visualization configurations. Most
of the time, they are not able to adapt to VR
configurations, leading to a degradation of some of
the performance/immersion factors of the VR
configuration.
Some general purpose haptic systems have been
integrated within large screen projection-based VR
configurations (Brederson et al., 2000), (Grant and
A. Helser, 1998), (Garrec et al., 2004).
The only large screen projection based VR
configurations equipped with non-intrusive haptic
system involves the SPIDAR system (Bouguila et
al., 2000), (Tarrin et al., 2003), (Ishii and Sato,
1994) (Richard et al., 2006).
307
Chamaret D., Richard P. and Ferrier J. (2008).
FROM CAD MODEL TO HUMAN-SCALE MULTIMODAL INTERACTION WITH VIRTUAL MOCK-UP - An Automotive Application.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 307-310
DOI: 10.5220/0001506403070310
Copyright
c
SciTePress
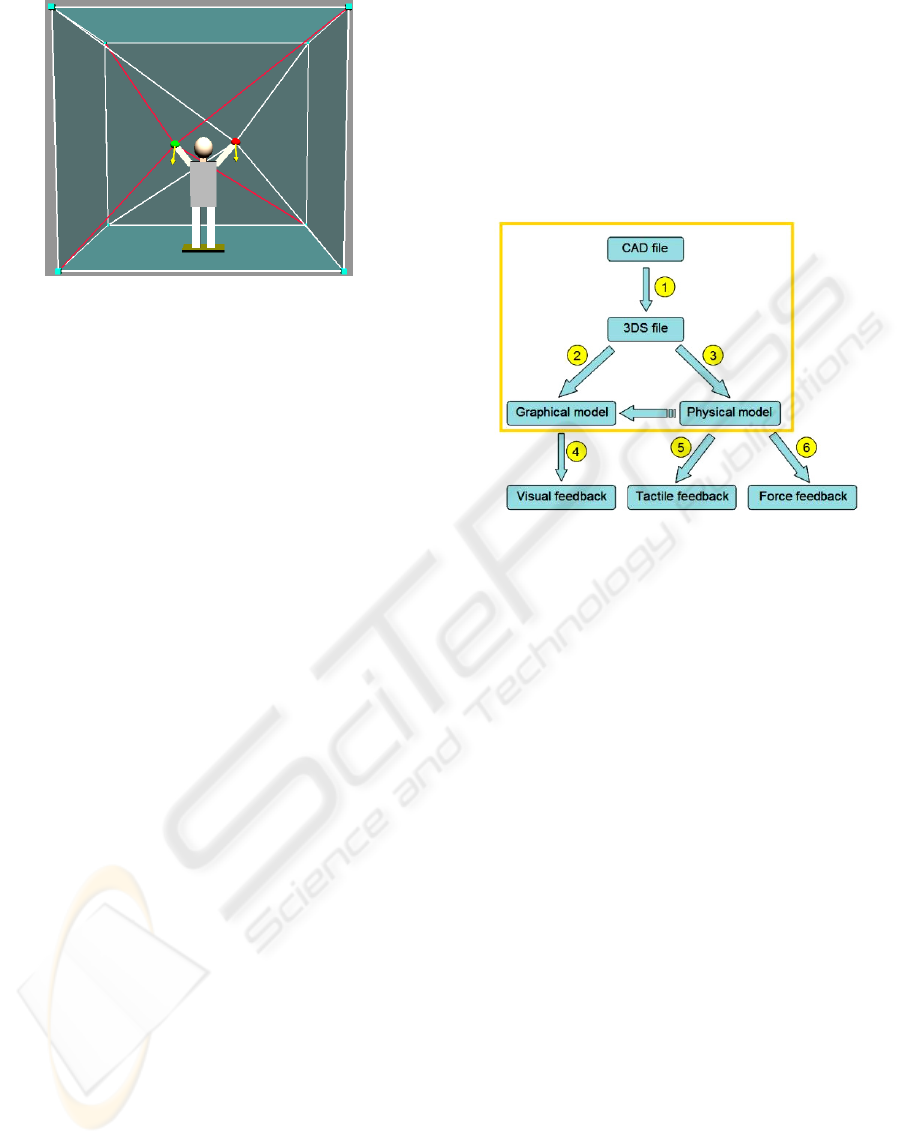
Figure 1: Schematics of the human-scale SPIDAR system.
This non-intrusive haptic device provides force feedback
to user’s both hands while moving in a large-scale
workspace.
2.2 Grasp Feedback
Grasp feedback includes both tactile and shape
feedback. Haptic systems exist for both but they are
different and rarely integrated.
The best known solution for providing a realistic
grasp feedback consists of using props. Props are
physical objects held in hand by the user. Props have
been proposed for tasks such as application control
(Coquillart and Wesche, 1999), 3D objects
manipulation (Hinckley, 1994), (Tarrin et al., 2003),
and design. Several psychophysics experiments
demonstrate the benefits of props (Hinckley, 1994).
Props provide stable grasp feedback, intuitive
manipulation as well as realistic shape and texture
rendering.
Props do not allow sensation of the collision
with a surface touched by the prop itself. Combining
props with force feedback is again a difficult task
because most force feedback systems can’t attach
props in a flexible way.
The next section of the paper presents a CAD to
VR methodology. Section 4 describes the developed
prop-based stringed haptic configuration. An
industrial application is presented in Section 5.
Section 6 concludes the paper and describes future
work.
3 CAD TO VR METHODOLOGY
The CAD to VR methodology is illustrated in Figure
2. Our methodology involves different steps such as
model tessellation (1), model integration (2-3) and
sensorial feedback (4-5-6). The CAD to VR model
transformation is illustrated in Figure 3.
3.1 Model Tessellation (1)
The first step was to choose an appropriate common
exchange file format between standard CAD
software (such as CATIA) and 3D general purpose
modelling software (such as 3D Studio Max). The
tessellation procedure consists in decreasing the
number of faces without degrading the 3D shape of
the model.
Figure 2: Schematics of the CAD to VR model
transformation.
3.2 Model Integration (2-3)
Many loaders may be used to integrate 3D models in
a real time C/C++ 3D application. However, this
leads to graphic simulation in which the virtual
objects do not have physical properties. In order to
give physical properties and behaviour to the model,
we developed a single procedure that allows to
automatically obtain both graphical and physical
models of loaded objects. Moreover, the physical
model on which is based the real time simulation,
exactly corresponds to the graphical one.
The physical model is built using PhysX
TM
an
efficient well-known open source physic engine
from AGEIA (http://www.ageia.com).
3.3 Sensorial Feedbacks (4-5-6)
In order to increase both realism of the simulation
and operator performance during interaction with the
virtual mock-up, different sensorial feedbacks are
provided. Simulated forces are calculated by the
physic engine and displayed on user hand using the
SPIDAR system.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
308

Figure 3: illustration of a CAD model transformation to a
physicalized VR model.
4 PROP-BASED STRINGED
HAPTIC INTERACTION
In the context of the automotive application
described in the following section, a prop has been
integrated into the SPIDAR system in order to
provide both realistic and low-cost grasp sensation
while performing the task. Figure 4 shows the
attachments of the prop to the SPIDAR (Figure 4a).
As shown in Figure 4b, the user grasps the prop (a
real car lamp is integrated into a plastic part). In
order to increase accuracy, both position and
orientation of the prop are obtained using a Patriot
3D tracking system (http://www.polhemus.com).
(a) (b)
Figure 4: Top view of the prop attached to the SPIDAR
system (a), grasping of the prop by a user (b).
5 AUTOMOTIVE APPLICATION
Our VR human-scale platform opens the door to
many CAD applications requiring realistic
integration modalities such as visualization, audio,
force and tactile feedback. One such application,
from the automotive industry, is described in this
section. It concerns accessibility and maintenance of
car lamps.
Figure 5: Illustration of the final stage of the task: the
application provides both haptic and visual force feedback
to the operator.
5.1 Description of the Application
During the conception stage, car designers have to
make sure that anyone will easily be able to achieve
maintenance task concerning car lamps. In this
context, special attention has to be paid to the
following aspects:
• Accessibility: to be able to reach and pick-up car
lamps,
• Replacement: to be able to remove broken lamps
and replace them by new ones.
Currently, the only solution is to build a mock-
up of the car. The process is of course slow and
expensive. A cheaper and faster solution consists in
realizing the tests on virtual mock-ups. An
additional advantage is that it can be done earlier in
the conception process, which eases modifications.
Our methodology associated to the human-scale
haptic virtual environment highly contributes to the
widespread use of virtual mock-up in a realistic
simulation.
This methodology has been validated in the
previously mentioned context (car lamps
maintenance). The Figure 5 shows screenshots of the
virtual mock-up during the maintenance task. The
FROM CAD MODEL TO HUMAN-SCALE MULTIMODAL INTERACTION WITH VIRTUAL MOCK-UP - An
Automotive Application
309

final stage of this task involves the correct
placement of a car lamp. As illustrated on the
bottom screenshot, both collision detection and force
feedback are visually displayed respectively using a
red colour and clear blue line (orientation of the
force).
5.2 Hardware and Software
Architecture
As opposed to most of the existing virtual reality
human-scale platforms that are based on clusters,
our hardware architecture is based on only one
Personal Computer (bi-Xeon 5150, 4Go RAM and
8800 GTX Graphic board).
The frame rate is however, in the described
application (600 000 Faces), maintained to about 30
frames per second. Thus, the use of a physical
Processing Unit is not necessary.
6 CONCLUSIONS AND FUTURE
WORK
We presented and validated a new methodology for
the efficient integration of CAD models in a
physical-based virtual reality simulation. User
interacts with virtual mock-up using a string-based
haptic interface that may provides haptic sensation
two both hands in a large workspace. Visual and
haptic displays provide users with sensory feedback
and improve both user performance and immersion.
Stereoscopic images are displayed on a 2m x 2.5m
retro-projected screen and viewed using polarized
glasses. The proposed methodology has been tested
with an automotive application task. However, the
presented approach is general enough to be
applicable to other tasks and industrial applications.
In the next future we plan to add a virtual hand
with physical properties to allow dexterous
manipulation of 3D objects. We will also replace the
magnetic tracking system by an optical MOCAP
solution. We will also use our methodology for other
CAD applications.
ACKNOWLEDGEMENTS
The authors would like to thanks the representative
of Valeo Lighting System (Angers - france) involved
in the project, especially Sébastien DENIS and
Xavier GALLARD.
REFERENCES
L. Bouguila, M. Ishii and M. Sato, “Multi-Modal Haptic
Device for Large-Scale Virtual Environment”, 8 th
ACM International Conference on Multimedia, 2000.
C. Cruz-Neira, D. Sandin, and T. Defanti, “Surround
Screen Projection Based Virtual Reality”. Proceedings
of SIGGRAPH, 1993.
W. Krueger and B. Froehlich, “The Responsive
Workbench”, IEEE Computer Graphics and
Applications, 1994.
P. Richard, D. Chamaret, F.-.X, Inglese, P. Lucidarme J.-L
Ferrier: Human-Scale Haptic Virtual Environment for
Product Design: Effect of Sensory Substitution.
International Journal of Virtual Reality, 2006, 5(2):
pp. 37-44.
T. H. Massie and J. K. Salisbury, “The PHANTOM Haptic
Interface: A Device for Probing Virtual Objects”,
Proceedings of the ASME Winter Annual Meeting,
Symposium on Haptic Interfaces for Virtual
Environment and Teleoperator Systems , 1994.
J.D. Brederson, M. Ikits, C.R. Johnson, C.D. Hansen, and
J.M. Hollerbach, “The Visual Haptic Workbench”,
Proceedings of the Fifth PHANToM Users Group
Workshop, 2000.
B. Grant and A. Helser, “Adding Force Display to a
Stereoscopic Head-Tracked Projection Display”,
VRAIS, 1998.
P. Garrec, J.P. Friconneau and F. Louveau, “Virtuose 6d:
A New Industrial Master Arm using Innovative Ball-
Screw Actuators”, Proc. of International Symposium
on Robotics, 2004.
N. Tarrin, S. Coquillart, S. Hasegawa, L. Bouguila, and M.
Sato, “The Stringed Haptic Workbench : a New Haptic
Workbench Solution”, EUROGRAPHICS Proceedings,
2003.
M. Ishii and M. Sato. “A 3d Spatial Interface Device using
Tensed Strings”, Presence, 3(1), 1994.
S. Coquillart and G.Wesche, “The Virtual Palette and the
Virtual Remote Control Panel: A Device and an
Interaction Paradigm for the Responsive Workbench.
Proc IEEE VR, 1999.
K. Hinckley, R. Pausch, J. Goble, and N. Kassell, “Passive
Real-World Interface Props for Neurosurgical
Visualization”, CHI, 1994.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
310
