
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY
INFORMATION
A Discussion
R. Aragues and C. Sagues
DIIS - I3A, University of Zaragoza, Mar´ıa de Luna, 50018 Zaragoza, Spain
Keywords:
Bearing-only, Feature parameterization: cartesian and inverse-depth, Delayed/Undelayed initialization.
Abstract:
In this paper we discuss feature parameterization and initialization for bearing-only data obtained from vision
sensors. The interest of this work refers to the comparison of the bearing-only data representation and ini-
tialization techniques. The behavior of the algorithm is analyzed for different robot motions and depth of the
features. The results are evaluated in terms of the sensitivity to step size and performance to ill conditioned
situations. The problem studied refers to robots moving on the plane, sensing the environment and extract-
ing bearing-only information from uncalibrated cameras to recover the position of the landmarks and its own
localization.
1 INTRODUCTION
The manipulation of bearing information is an impor-
tant issue in robotics. Bearing-only data is the kind of
information provided by cameras through the projec-
tion of landmarks which are in the scene. In order to
recover the position of these landmarks in the world,
multiple observations taken from different positions
must be combined.
Compared with information extracted from other
sensors such as lasers, bearing information is compli-
cated to use. However, the multiple benefits of using
cameras havemotivated the interest in the researchers.
These benefits include the property that cameras are
able to sense quite distant features so that the sensing
is not restricted to a limited range.
This sensing of the environment in the form of
bearing information may be used for many applica-
tions such as the computation of the landmark local-
ization in the environment or the calculation of the
own robot pose mostly known as SLAM Simultane-
ous Localization and Mapping.
Algorithms which use bearing information must
deal with the problem of creating representations for
features by the combination of bearing data. The
problem of feature parameterization and feature ini-
tialization are of big importance here.
With regard to the feature parameterization, the
classical approach has been the use of a cartesian
parameterization (Bailey, 2003), (Kwok and Dis-
sanayake, 2004), (Costa et al., 2004), (Klippenstein
et al., 2007). Some approaches prefer a depth param-
eterization, where features are stored as an starting
point of the ray where the feature lays, the inclina-
tion of the ray and the depth (Davison, 2003). An
inverse-depth parameterization is an alternative, simi-
lar to the depth parameterization but using the inverse
of the depth instead (Montiel et al., 2006). Some ap-
proaches use no explicit feature parameterization and
instead represent landmarks as constraints between
three robot poses (Trawny and Roumeliotis, 2006).
With regard to the feature initialization, Unde-
layed techniques immediately introduce features in
the map so that they can be used to improve the
robot estimation (Montiel et al., 2006), (Trawny and
Roumeliotis, 2006), (Costa et al., 2004), (Kwok and
Dissanayake, 2004) while Delayed techniques defer
the introduction into the map until the features are
near-Gaussian (Bailey, 2003), (Klippenstein et al.,
2007). Delayed techniques often create temporal rep-
resentations for landmarks which are maintained in
separate filters and evolve with the incorporation of
new observations of these landmarks until they are fi-
nally introduced into the map (Davison, 2003).
The problem of depth computation for landmarks
is afforded in two separate ways. Some approaches
create depth representation from only one bearing as-
suming an approximate value for it. These techniques
are able to cover depths from the position were the
landmark was observed until infinity or until a max-
252
Aragues R. and Sagues C. (2008).
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 252-261
DOI: 10.5220/0001500002520261
Copyright
c
SciTePress

imum depth within the workspace (Kwok and Dis-
sanayake, 2004), (Davison, 2003), (Montiel et al.,
2006). The other approach to depth computation is
the combination of observations taken from differ-
ent robot poses, where triangulation techniques are
used to recover the depth (Bailey, 2003), (Klippen-
stein et al., 2007).
The interest of this work refers to the comparison
of the bearing-only data representations and initial-
ization techniques, analyzed for different robot mo-
tions relative to depth of the landmarks in the scene.
Two feature parameterizations are studied. The first
is an standard cartesian parameterization, where fea-
tures are described by their (x,y) position. The alter-
native representation is an adaptation of the inverse-
depth (Montiel et al., 2006) to the 2D situation. Be-
sides, both Undelayed and Delayed strategies for fea-
ture initialization are used and their performance is
compared in different scenarios.
The problem studied in this paper refers to robots
moving on the plane, sensing the environment and ex-
tracting bearing-only information from uncalibrated
images to recover the position of the landmarks and
its own localization. As a result of this investigation,
some theoretical solutions are proposed, and their va-
lidity is supported by an exhaustive experimentation
using simulated data. Some preliminary experiments
have been carried out using real data from omnidirec-
tional images.
2 BACKGROUND
The problem studied in this paper is related to the use
of bearing-only information for the SLAM problem
using EKF. The robot moves on the plane and ele-
ments in the map are represented by their 2D coor-
dinates. Robot observes landmarks within a field of
view of 360
◦
due to the use of omnidirectional cam-
eras and obtains bearing-only measurements. Odom-
etry is used to predict robot motion in every step. The
EKF Extended Kalman Filter is a widely used tech-
nique in these problems and a lot of information can
be found in the literature. The data association prob-
lem is not discussed in this paper. An innovation test
is used to select the observations which will be used
in the filter update. This test computes an individ-
ual compatibility for all observation-prediction pairs
and then obtains the greatest set of jointly compatible
pairs using the JCBB algorithm (Neira and Tard´os,
2001). Although traditionally this algorithm is used
to solve the data association problem, we use it in or-
der to avoid the filter divergence in the presence of
poorly initialized features or high innovations.
Along this paper, next notation will be used:
x = (x
r
,x
1
...x
n
): the state vector containing cur-
rent robot pose (x
r
) and the positions of landmarks
(x
1
...x
n
)
P: the covariance matrix.
x
r
j
= (x
r
j
,y
r
j
,θ
r
j
) ∈ R
3
, θ
r
j
⊂ [−π,π] , for j =
1..k: j-th robot pose. When there is no confusion, the
subscript j is omitted.
x
i
= (x
i
,y
i
) ∈ R
2
, for i = 1..n: Position of the i-
th feature in the map, for cartesian parameterization,
or x
i
= (x
i
,y
i
,θ
i
,ρ
i
) ∈ R
4
, θ
i
⊂ [−π,π], for i = 1..n:
when referring to inverse-depth parameterization.
z
ji
: measurement taken from robot pose j to fea-
ture i. When only one robot pose is used, z
i
refers to
the observation of feature i.
3 FEATURE
PARAMETERIZATION
Cartesian parameterizations represent features by
their (x,y) coordinates. This parameterization is very
intuitive since the feature position within the map can
be easily obtained. The initialization of features in
this cartesian parameterization is problematic due to
the nonlinearity of the triangulation techniques used
to recover its position based on the observations taken
from different robots poses. It can be easily shown
that bearings generate bigger uncertainty as landmark
position goes away from the camera. The observation
model for a feature x
i
= (x
i
,y
i
) observed from a robot
pose x
r
= (x
r
,y
r
,θ
r
) is (Bailey, 2003):
z
i
= h(x
r
,x
i
) = arctan
y
i
− y
r
x
i
− x
r
− θ
r
(1)
Inverse-depth parameterizations represent a fea-
ture x
i
as a ray starting at (x
i
,y
i
), the position where
the feature was firstly observed, with a global bearing
θ
i
and a depth of
1
ρ
i
. Every feature is stored in the
state vector using these four parameters (x
i
,y
i
,θ
i
,ρ
i
).
The cartesian coordinates of the landmark could be
calculated as:
x
i
y
i
+
1
ρ
i
m
i
(2)
where m
i
= [cos(θ
i
)sin(θ
i
)]
T
.
The observation model with inverse-depth for a
feature x
i
= (x
i
,y
i
,θ
i
,ρ
i
) observed from a robot pose
x
r
= (x
r
,y
r
,θ
r
) is:
h = atan2(h
xy
y
,h
xy
x
) (3)
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion
253

where (h
xy
y
,h
xy
x
) are the coordinates of the feature in
the robot reference:
h
xy
=
h
xy
x
h
xy
y
= R
r
x
i
y
i
+
1
ρ
i
m
i
−
x
r
y
r
(4)
with R
r
=
cosθ
r
sinθ
r
−sinθ
r
cosθ
r
.
This observation model remains valid if next
equation is used instead of equation 4 provided that
ρ
i
> 0:
h
xy
=
h
xy
x
h
xy
y
= R
r
ρ
i
x
i
y
i
−
x
r
y
r
+ m
i
(5)
As advantage with respect to the cartesian pa-
rameterization, the observation model for the inverse
depth is near linear. Additionally, landmarks at in-
finity (ρ
i
= 0) or uncertainties that extend to infin-
ity can be represented. The main drawback of the
inverse-depth is that features are over-parameterized,
and therefore the Covariance matrix size is greater.
4 FEATURE INITIALIZATION
The feature initialization in SLAM consists in the cre-
ation of a representation of the landmark’s position
and its introduction into the stochastic map through
its mean and its covariance matrix. The feature ini-
tialization problem of bearing-only is due to the fact
that features are only partially observable.
As told, a measurement only gives information
about the direction towards the landmark and two or
more observations must be combined in order to re-
cover the depth of the landmark. However, there are
some situations where the depth cannot be recovered
Next we give a formal description of these situations.
Theorem 1.- Let us name x
r
1
a robot position and x
r
2
a
second position translated but not rotated with respect
to x
r
1
. Let us name z
1i
the observation of a feature x
i
taken from x
r
1
and z
2i
the observation of the same
feature taken from x
r
2
. Let us name d
p
the transla-
tion from x
r
1
to x
r
2
on a perpendicular direction to
z
1i
and d
t
the translation on a parallel direction to z
1i
.
Without loss of generality, let d
t
be equal to zero. The
landmark depth (distance between x
r
1
and the land-
mark) can be totally determined from α = z
1i
− z
2i
as
depth = d
p
/tanα (6)
Corollary 1.1.- This is an undetermined problem
(0/0) when simultaneously d
p
= 0 and α = 0 + kπ
for k ∈ Z.
Corollary 1.2.- This problem remains undetermined
independently of the magnitude of d
t
.
Corollary 1.3.- The landmark is at infinity if simulta-
neously α = 0 + kπ for k ∈ Z and d
p
is different of
zero .
Theorem 2.- Let us name x
r
1
a robot position and x
r
2
a
second position rotated but not translated with respect
to x
r
1
. Let us name z
1i
the observation of a feature x
i
taken from x
r
1
and z
2i
the observation of the same
feature taken from x
r
2
. Robot rotation (θ
r
2
) can be
absolutely determined from θ
r
2
= z
1i
− z
2i
.
Corollary 2.1.- Given a pure rotation motion, feature
depth cannot be recovered.
Corollary 2.2.- Given a translation and rotation mo-
tion with landmarks of infinite depth, the robot rota-
tion can be computed from z
1i
− z
2i
for any d
p
< ∞
and robot translation cannot be recovered.
Based on these theorems, ill-conditioned situa-
tions are identified:
Proposition 1.- Depth of features aligned with robot
trajectory cannot be recovered. This situations is for-
malized in Corollaries 1.1 and 1.2.
Proposition 2.- Depth cannot be recovered with pure
rotation motions as shown in Corollary 2.1.
Proposition 3.- Landmarks at infinity give robot ori-
entation, but no translation information can be ob-
tained from them.This is based on Corollary 2.2.
Feature estimates calculated when the depth com-
putation problem is ill-conditioned present high co-
variances and great estimation errors which may
cause linealization problems. Once a feature has been
wrongly initialized, new observations taken from
robot poses not aligned with the feature will not be
able to correct its position. If a cartesian parameter-
ization is used, an additional problem is that features
with infinite depth cannot be represented and their ini-
tialization must be deferred. This situation is formal-
ized in Corollary 1.3.
4.1 Undelayed Initialization
The undelayed initialization consists in the introduc-
tion of landmarks into the system the first time the
landmark is observed. This technique presents many
benefits since the information attached to a landmark
can be used earlier and it allows the use of landmarks
which may never been initialized if a delayed strat-
egy is used.Since the first time a landmark is observed
only bearing information is available, undelayed tech-
niques must deal with the problem of creating a repre-
sentation for the depth and its associated uncertainty.
If an inverse-depth parameterization is used, land-
marks are introduced using a fixed initial depth and an
uncertainty representation is created which covers all
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
254

depths from some d
min
to infinity. This initial depth
must be adjusted depending on the workspace.
Since cartesian parameterization requires low co-
variances, an undelayed initialization is only possible
if multiple hypothesis in depth are created (Kwok and
Dissanayake, 2004), (Kwok et al., 2007), (Sola et al.,
2005). All these approaches present a high complex-
ity and size of the map. Due to this complexity, ap-
proaches using undelayed initialization together with
cartesian parameterization are no longer analyzed in
this paper.
4.2 Delayed with Two Observations
This delayed technique consists in the combination of
the first two observations of a landmark to recover its
position using a triangulation algorithm. This is a not
purely delayed technique, since there are no condi-
tions which must be satisfied by the observations in
order for the landmark to be initialized, and all land-
marks are introduced in the map provided that they
are observed from at least two robots poses. The main
benefit of this initialization strategy is that the solution
is independent on the workspace. However, triangula-
tion algorithms used to recover the landmark position
are highly non-linear and, depending on the arrange-
ment of robot poses and features, the problem may be
ill-conditioned.
If a cartesian parameterization is used, the recov-
ered feature position must be near-Gaussian and co-
variances must be small. For this reason, additional
tests are used to check that features satisfy these con-
ditions. If features are parameterized using inverse-
depth, this strategy may suppose a benefit in the sense
that it is independent on the size of the scene. There-
fore higher covariances in the estimates are admissi-
ble and recovered features are near-Gaussian even for
low parallaxes.
4.3 Delayed until Condition
In a pure delayed initialization technique, observa-
tions of landmarks are accumulated and its initializa-
tion is deferred until a condition of Gaussianity is sat-
isfied; then observations are used to create a repre-
sentation for the feature (Bailey, 2003), (Klippenstein
et al., 2007).
If a delayed initialization is used, some landmarks
may neverbeen initialized. Since the information pro-
vided by landmarks cannot been used until the land-
mark is initialized, a delayed technique decreases the
amount of information available to improve robot the
pose. Many delayed techniques present a high com-
putational cost to calculate the condition, and have
their own problems and limitations. The main benefit
is that the representation for the landmark is more ac-
curate and reliable than the obtained by an undelayed
strategy.
5 DISCUSSION
As told, the aim of this work is the comparison of
cartesian and inverse-depth parameterizations com-
bined with delayed and undelayed initialization tech-
niques. These have been selected because are the
most commonly used, being also simple and of low
computational complexity.
5.1 Inverse-Depth Undelayed
This technique is an adaptation to the 2D situation of
the technique described in (Montiel et al., 2006). A
feature x
i
is introduced into the map using a single
observation. The current robot pose x
r
= (x
r
,y
r
,θ
r
)
is used together with the observation z
i
and an ini-
tial depth ρ
0
parameterized in inverse-depth to get the
feature representation x
i
. This depth is worked out
using a minimal distance d
min
which must be selected
depending on the workspace:
ρ
min
=
1
d
min
;ρ
0
=
ρ
min
2
;σ
ρ
=
ρ
min
4
(7)
where ρ
min
is the inverse of depth, ρ
0
is the ini-
tial inverse-depth, which is the middle value of the
interval [0,ρ
min
], and σ
ρ
is the standard deviation
used to initialize ρ
0
(95% of ρ is in the interval
ρ
0
− 2σ
ρ
,ρ
0
+ 2σ
ρ
= [0, ρ
min
].) The initial value of
the feature is calculated as:
x
i
= g(x
r
,z
i
,ρ
0
) = (x
r
,y
r
,θ
r
+ z
i
,ρ
0
) (8)
5.2 Inverse-Depth Delayed with Two
Observations
As a proposal, an inverse-depth parameterization
(Montiel et al., 2006) is combined with a delayed ini-
tialization technique where the second observation is
used to calculate the initial depth for the feature. The
position for the feature x
i
which has been observed
from x
r
1
and x
r
2
producing measurements z
1i
and z
2i
is calculated as follows:
x
i
= g(x
r
1
,x
r
2
z
1i
,z
2i
) = (x
r
2
,y
r
2
,θ
r
2
+ z
2i
,ρ
0
)
ρ
0
=
s
2
∗c
1
−c
2
∗s
1
(y
r
1
−y
r
2
)∗c
1
−(x
r
1
−x
r
2
)∗s
1
(9)
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion
255

where c
j
= cos(θ
j
+ z
ji
) and s
j
= sin(θ
j
+ z
ji
), for
j = 1,2.
An additional test is used in order to detect situ-
ations where inverse-depth cannot be recovered and
intersections take place in the opposite direction of
the observation. In these situations, the initialization
is deferred.
5.3 Cartesian Delayed with Two
Observations
Given the first two observations z
1i
,z
2i
of a landmark
x
i
taken from robot poses x
r
1
,x
r
2
, the landmark po-
sition x
i
= (x
i
,y
i
) is calculated as follows (Bailey,
2003):
x
i
= g
1
(x
r
1
,x
r
2
,z
1i
,z
2i
) =
x
r
1
s
1
c
2
−x
r
2
s
2
c
1
−(y
r
1
−y
r
2
)c
1
c
2
s
1
c
2
−s
2
c
1
y
i
= g
2
(x
r
1
,x
r
2
,z
1i
,z
2i
) =
y
r
2
s
1
c
2
−y
r
1
s
2
c
1
+(x
r
1
−x
r
2
)s
1
s
2
s
1
c
2
−s
2
c
1
(10)
where c
j
= cos(θ
j
+ z
ji
) and s
j
= sin(θ
j
+ z
ji
), for
j = 1,2.
Similarly a test is used to check that features can
be recovered and intersections of bearings are not in
the opposite direction of the observations.
5.4 Cartesian/Inverse-Depth Delayed
until Finite Depth
A delayed technique is proposed where feature ini-
tialization is deferred until finite uncertainty in depth
can be estimated.
This is achieved by a simple test which compares
two observation rays and checks if they are parallel.
This situation is characterized by Corollaries 1.1 and
1.3. When observation rays are parallel, the uncer-
tainty in depth of the recovered landmark extends to
infinity and the initialization is deferred. This test is
especially useful when a cartesian parameterization
is used, since infinite depths cannot been modeled.
Let x
r
j
= (x
r
j
,y
r
j
,θ
r
j
), for j = 1, 2 be the two
robot poses where observations z
ji
, for j = 1,2 to
a landmark x
i
were taken. Global bearings α
ji
, for
j = 1,2 to the landmark are calculated as:
α
ji
= θ
r
j
+ z
ji
(11)
If we name S
α
ji
the linearized propagated covari-
ance for bearing α
ji
then the Chi-squared test for Fi-
nite Depth is expressed as:
(α
1i
− α
2i
)
2
S
α1i
+ S
α
2i
> χ
2
0.99,1d.o. f
(12)
5.5 Cartesian/Inverse-Depth Delayed
until Feature Not Aligned with
Robot Poses
As stated in Proposition 1, the initialization of fea-
tures aligned with the robot trajectory is problematic
when working with bearing-only data. When a fea-
ture is observed from two robot poses which are in
line with the feature, it is not possible to make a right
depth initialization. Corollary 1.1. gives a formal
explanation of this situation: feature is aligned with
robot trajectory when the observation rays are paral-
lel and the robot translation takes place in a direction
which is parallel to the observation.
Let x
r
j
= (x
r
j
,y
r
j
,θ
r
j
), for j = 1, 2 be the two
robot poses where observations to a landmark x
i
were
taken. From here α
1i
, α
2i
, for j = 1,2 can be com-
puted with equation 11. Let S
α
ji
, for j = 1,2 be their
linearized propagated covariances. Observation rays
are parallel when:
(α
1i
− α
2i
)
2
S
α1i
+ S
α
2i
≤ χ
2
0.99,1d.o. f
(13)
The robot trajectory from x
r
1
to x
r
2
has a global
inclination which can be calculated as:
θ
t
= arctan
y
r
2
− y
r
1
x
r
2
− x
r
1
(14)
Let S
θ
t
be the linearized propagatedcovariancefor
bearing θ
t
. The trajectory is parallel to the observa-
tion rays when:
(θ
t
− α
ji
)
2
S
θt
+ S
α
ji
≤ χ
2
0.99,1d.o. f
(15)
for j = 1,2.
The initialization of features is deferred until a
pair of observations is available where the feature is
not aligned with the trajectory. This delayed tech-
nique is less restrictive than the explained in section
5.4 and is specially useful for an inverse-depth param-
eterization since it allows the initialization and the use
of features of infinite depth.
6 EXPERIMENTS
In order to analyze the performance of the different
parameterizations and initialization techniques, some
experiments have been designed so that the perfor-
mance and robustness of the algorithms can be ana-
lyzed.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
256
The experimentation and analysis of results is car-
ried out using a simulator which presents many ben-
efits. First of all, exactly the same experiment can
be solved by several algorithms so that results are
fully comparable. Besides, ground truth information
is available to compare with the obtained results.
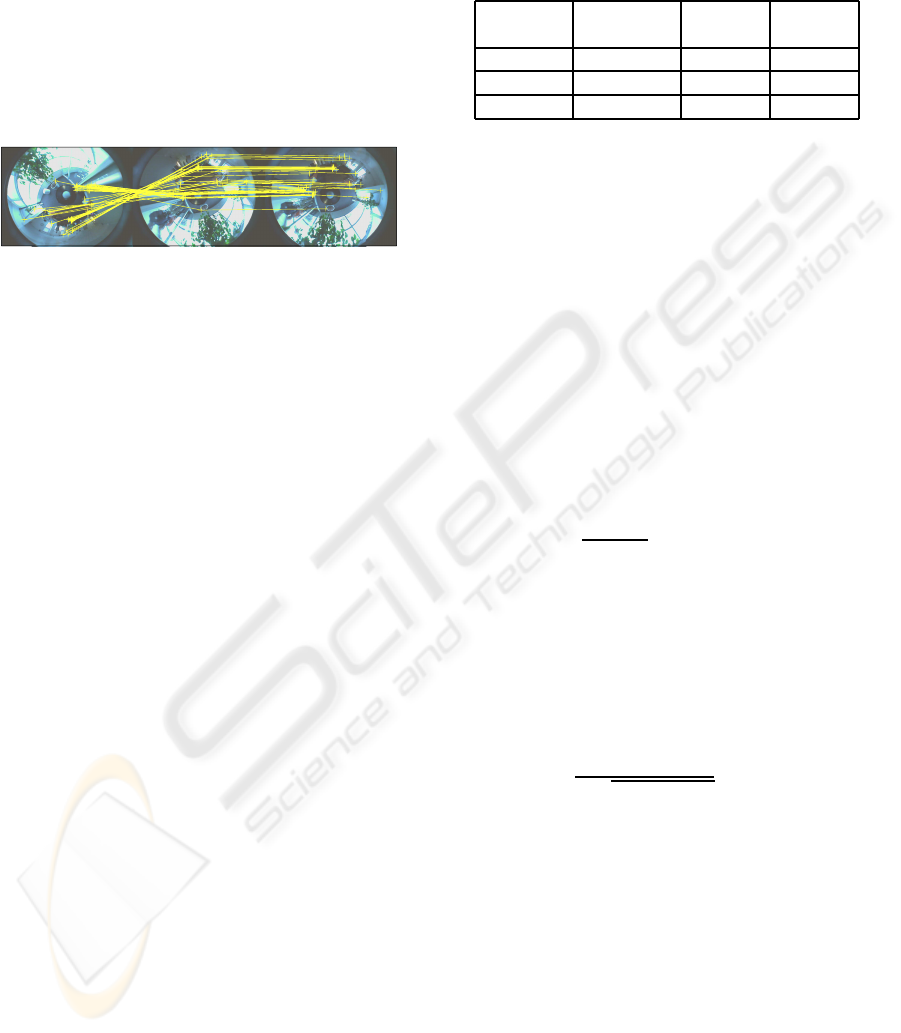
Some preliminary experiments have been carried
out using omnidirectional images which can be seen
in Figure 1. The matches have been obtained using
SURF descriptors (Murillo et al., 2007).
Figure 1: Omnidirectional image: feature extraction and
matching.
In the simulated experiments, an observationnoise
with an standard deviation of 0.125 degrees is used.
Features are placed on the walls of a squared room.
An initialization to the system is introduced from
three robot poses and the first 5 observed landmarks.
It is based on SFM techniques with the Trifocal Ten-
sor (Sag¨u´es et al., 2006). The data association prob-
lem is not discussed in this paper and data association
is supposed to be perfect.
Algorithms have been tested in different scenarios
and under different conditions of visibility, trajectory
and step sizes. The Visibility affects to the number
of visible landmarks. Two possibilities are evaluated:
Total, where all features are visible from all robot
poses and Section, where the workspace is divided
into four sections; In every step robot observes the
features within its section and a few from the neigh-
borhood in order to connect the sections. When the
visibility is Total, no loop closing takes place and dis-
tant features are used.
As stated in section 4 the Robot Trajectory has
a big influence on depth computation in such a way
that if landmark is on the direction of robot transla-
tion, depth computation is an undetermined problem.
Two trajectories have been evaluated. The first is an
Squared trajectory composed by several pure trans-
lation motions and four 90
◦
pure rotations. In this
trajectory some features are aligned with the robot
movement for many steps. The odometry noise is in-
troduced as a function of the step size (st) and it can
be seen in columns Pure translation and Pure rotation
of Table 1. The second trajectory is Circular: Robot
describes a circumference when moving along the en-
vironment which supposes mixed rotations and trans-
lations. No feature in the map is observed in line with
the trajectory. The standard deviations of the odome-
try noise are shown in column Mixed motion of Table
1,
Table 1: Odometry noise relative to the step size (st).
Standard Pure Pure Mixed
deviation translation rotation motion
x
r
0.01∗ st 0.03∗ st 0.03∗ st
y
r
0.01∗ st 0.03∗ st 0.03∗ st
θ
r
2
◦
2.5
◦
2.5
◦
The Step Size determines the distance (in meters)
between two consecutive robot poses. This is the pa-
rameter which affects the most the behavior of algo-
rithms. Step sizes of 0.125 m, 0.250 m, 0.5 m and 1
m are tested.
6.1 Analyzed Information
The variables used in order to analyze the perfor-
mance of an algorithm are listed below.
Final Divergence. Percent of results where the final
robot pose diverges from its estimation. The condi-
tion which is tested for each component (x
r
,y
r
,θ
r
) in-
dependently can be written as
(a− ba)
2
P
> χ
2
0.99,1d.o. f.
(16)
a being (x
r
,y
r
,θ
r
) the ground-truth, ba the estimated
value for variable a and P its estimated covariance.
Map Consistency. Percent of features in the final
map whose estimation is consistent with the ground
truth. A feature is considered consistent if the estima-
tion error in its x
i
or y
i
coordinate satisfy:
|a− ba|
+
q
P χ
2
0.99,1d.o. f.
≤ 1.5 (17)
where the variable a represents the x
i
or y
i
coordi-
nates.
Trajectory Divergence. Percent of steps in the
trajectory where the estimation of the robot pose (x
r
,
y
r
, θ
r
) diverges.
Feature Initialization Step. Average of the number
of steps needed to initialize a feature, calculated as
the difference between the step when a feature is first
observed and the one when the feature is introduced
into the map.
Feature Usage. Average of the feature used per step
calculated as the percentage of features used in the
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion
257
0.1250.25 0.5 1
0
20
40
60
80
100
Final divergence
step size
% final divergence
xy−d
xy−f
xy−l
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency
step size
% consistent features
xy−d
xy−f
xy−l
0.1250.25 0.5 1
0
20
40
60
80
100
Trajectory divergence
step size
% steps divergence
xy−d
xy−f
xy−l
(a) (b) (c)
0.1250.25 0.5 1
1
1.5
2
2.5
3
3.5
4
Feature initialization step
step size
number of steps to initialize features
xy−d
xy−f
xy−l
0.1250.25 0.5 1
0
20
40
60
80
100
Feature usage
step size
% features used per step
xy−d
xy−f
xy−l
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency per step
step size
% consistent features per step
xy−d
xy−f
xy−l
(d) (e) (f)
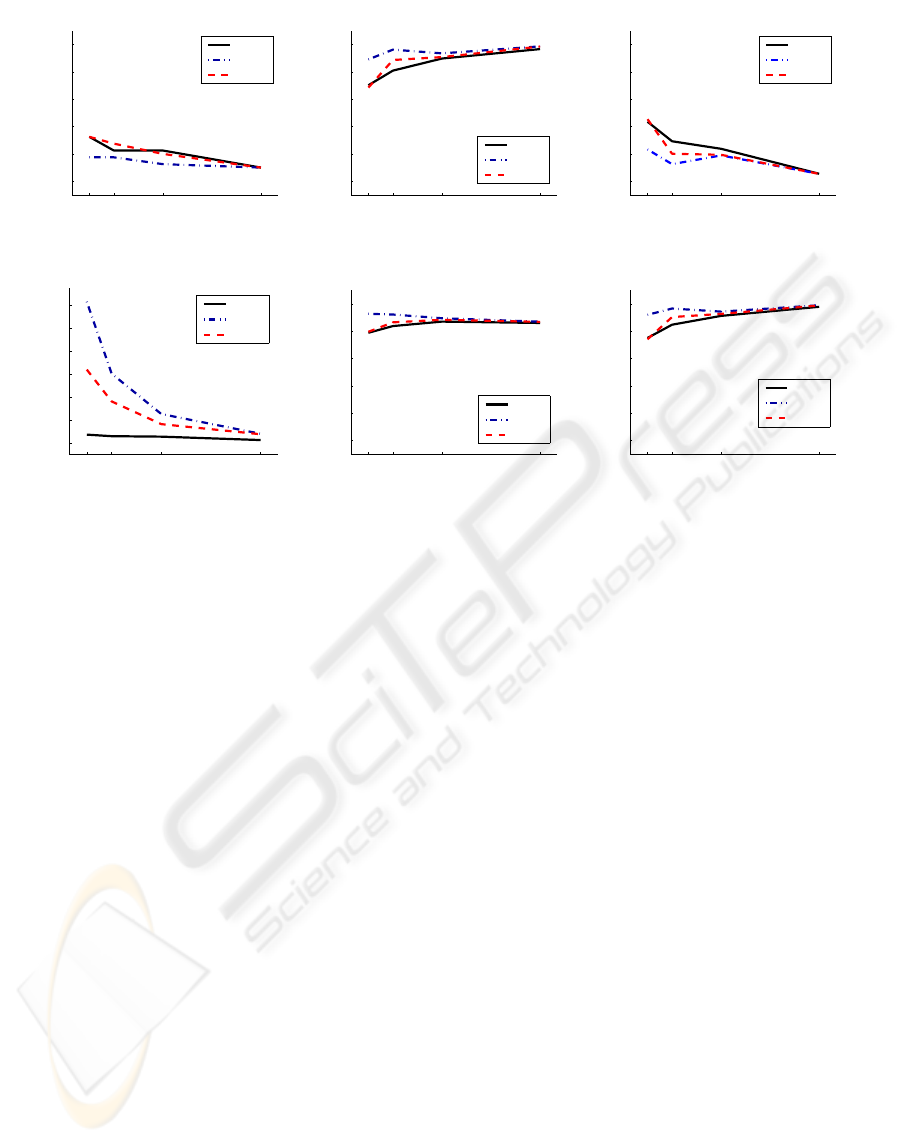
Figure 2: Cartesian delayed techniques comparison. Analysis of the results for different step sizes (x-axis). The algorithms
used are cartesian delayed. xy-d: with two observations. xy-f: until finite depth. xy-l: until feature not aligned with robot
poses.
filter update versus the features observed.
Map Consistency per Step. Average of the percent
of consistent features in the map in every step.
Additionally, information related to the precision
and error of the final robot pose, the trajectory and the
final map has been also studied.
6.2 Results
A total of 160 experiments have been designed, and
all of them have been solved using the available algo-
rithms discussed in section 5. For the Inverse-depth
undelayed, a minimal depth d
min
= 0.5m is used.
The results are analyzed in three different blocks.
In the first we compare the cartesian delayed algo-
rithms. In the second, we compare all inverse-depth
delayed approaches and in the third block, a global
comparison is carried out where the best of the carte-
sian delayed algorithms and the inverse-depth de-
layed algorithms are compared to the inverse-depth
undelayed algorithm.
6.2.1 Cartesian Delayed Comparison
The results obtained by the cartesian delayed algo-
rithms can be found in Figure 2. The cartesian de-
layed until finite depth (xy-f) algorithm performs bet-
ter than the delayed with two observations (xy-d) and
the delayed until features not aligned (xy-l) methods:
the final divergence (Figure 2.a) and trajectory diver-
gence (Figure 2.c) are the lowest for all step sizes, the
map consistency (Figure 2.b, Figure 2.f) are the high-
est, and the number of features used to update (Figure
2.e) is higher than the used by the other cartesian al-
gorithms for all step sizes even though this algorithm
needs more steps to initialize a feature (Figure 2.d).
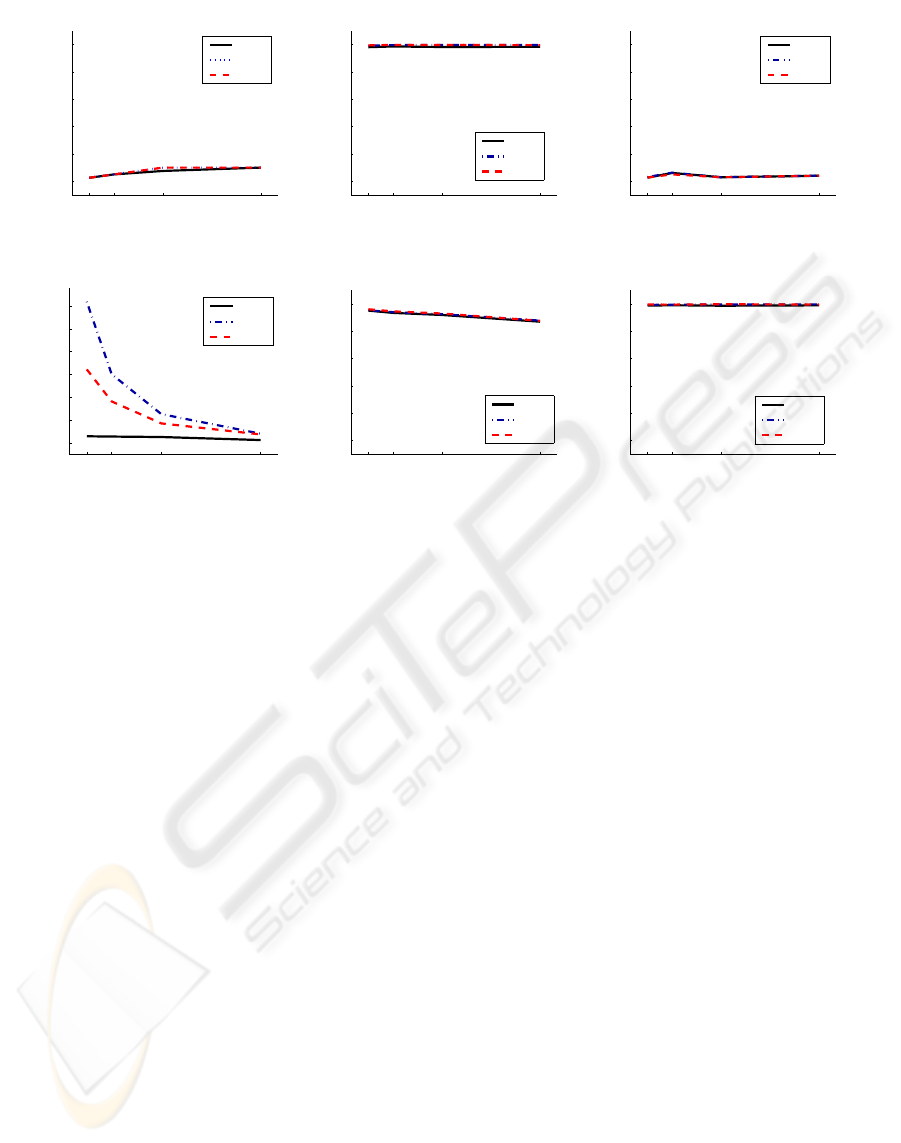
6.2.2 Inverse-depth Delayed Comparison
From the study of the results obtained by the inverse-
depth delayed algorithms, we can observe that all al-
gorithms performed in a very similar way (Figure 3).
The final divergence (Figure 3.a), map consistency
(Figure 3.b), trajectory divergence (Figure 3.c), fea-
ture usage (Figure 3.e) and map consistency per step
(Figure 3.f) results are similar for all inverse-depth de-
layed algorithms.Only the feature initialization step
(Figure 3.d) differs, due to the use of the different de-
layed strategies.
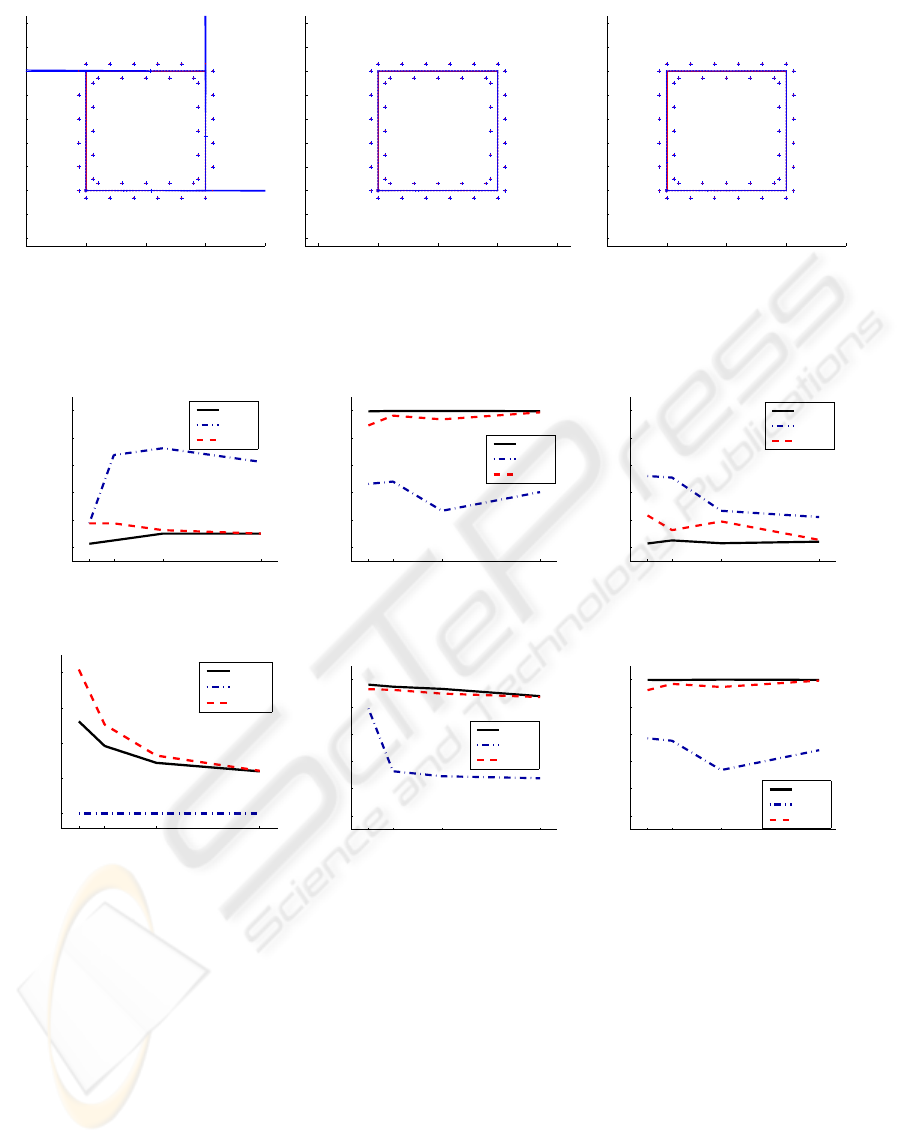
An especial study is carried out in order to com-
pare the capability of the inverse-depth algorithms to
deal with features which are observed during many
steps aligned with the trajectory. The most critical sit-
uation is when the robot moves following an squared
trajectory and only observes landmarks within its sec-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
258
0.1250.25 0.5 1
0
20
40
60
80
100
Final divergence
step size
% final divergence
id−d
id−f
id−l
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency
step size
% consistent features
id−d
id−f
id−l
0.1250.25 0.5 1
0
20
40
60
80
100
Trajectory divergence
step size
% steps divergence
id−d
id−f
id−l
(a) (b) (c)
0.1250.25 0.5 1
1
1.5
2
2.5
3
3.5
4
Feature initialization step
step size
number of steps to initialize features
id−d
id−f
id−l
0.1250.25 0.5 1
0
20
40
60
80
100
Feature usage
step size
% features used per step
id−d
id−f
id−l
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency per step
step size
% consistent features per step
id−d
id−f
id−l
(d) (e) (f)
Figure 3: Inverse-depth delayed comparison. Analysis of the results for different step sizes (x-axis). The algorithms are: id-d:
with two observations. id-f: until finite depth. id-l: until feature not aligned with robot poses.
tion. In this situation the problematic features are F12,
F23, and F34 (Figure 4). In this figure, the ground-
truth robot trajectory and landmark positions are dis-
played in red, while the estimates and uncertainties
calculated by the algorithms are drawn in blue. As
can be observed, both the trajectory and the landmark
positions have been correctly estimated in all cases.
However, features F12, F23 and F34 present high un-
certainty (Figure 4.a) when the algorithm used is the
inverse-depth with two observations (id-d).
Paying attention to the problematic features (F12,
F23, F34) in Figure 4 we can observe the results of
an earlier initialization of features which are in line
with the trajectory. Even though their initial estimate
and covariance correctly represent the feature posi-
tion, posterior observations are not able to correct its
position due to the huge innovation.
The Inverse-depth delayed until finite depth (id-
f) and Inverse-depth delayed until feature not aligned
with robot poses (id-l) performed in a similar way.
However, the second is preferred because of its capa-
bility to initialize and use features of infinite depth.
6.2.3 Global Comparison
As can be observed in Figure 5, the behavior of the
inverse-depth undelayed algorithm (id-u) is seriously
affected by the step size. For the smallest step size
(0.125m), almost all experimentsconvergedin the last
robot pose (Figure 5.a) while for the other step sizes,
many experiments diverged. The number of consis-
tent features in the final map (Figure 5.b) is lower than
for the other algorithms. This behavior is also ob-
served for the number of consistent features per step
(Figure 5.f).
The cartesian delayed until finite depth algorithm
(xy-f), its behavior is not so much affected by the step
size but we can observe a better performance when
the step size increases: the final divergence (Figure
5.a) is slightly higher for smaller step sizes. The num-
ber of consistent features in the final map (Figure 5.b)
and along the steps (Figure 5.f) slightly decreases for
smaller step sizes. The feature usage (Figure 5.e) re-
mains high for all step sizes.
The inverse-depth delayed until features not aligned
algorithm (id-l) produced the best results, exhibiting
an stable behavior for all step sizes: almost all ex-
periments converged (Figure 5.a) and also along the
trajectory (Figure 5.c). Almost all features are consis-
tent in the final map (Figure 5.b) and along the steps
(Figure 5.f), and the feature usage is the highest (Fig-
ure 5.e).
An interesting information about the features us-
age can be extracted from Figure 5.d and Figure 5.e:
it can be observed that when an undelayed strategy
is selected, the percent of features used to update the
map in every step (Figure 5.e) is much lower than the
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion
259
−5 0 5 10 15
−4
−2
0
2
4
6
8
10
12
14
F1 F2
F7
F38
F39
F44
F3 F4
F8 F9 F10
F36
F37
F42
F43
F5
F6
F11
F13
F14
F15
F18
F19
F20
F21
F12
F16
F17
F22
F24
F25
F29
F30F31
F23
F26F27F28
F32
F33
F35
F40
F41
F34
FINAL MAP: INVERSE−DEPTH Delayed (two observations)
−5 0 5 10 15
−4
−2
0
2
4
6
8
10
12
14
F1 F2
F7
F38
F39
F44
F3 F4
F8 F9 F10
F36
F37
F42
F43
F5
F6
F11
F13
F14
F15
F18
F19
F20
F21
F12
F16
F17
F22
F24
F25
F29F30F31
F23F26F27F28
F32
F33
F35
F40
F41
F34
FINAL MAP: INVERSE−DEPTH Delayed (features not aligned)
−5 0 5 10 15
−4
−2
0
2
4
6
8
10
12
14
F1 F2
F7
F38
F39
F44
F8
F36
F37
F42
F43
F3
F9 F10
F4
F14
F15
F18
F19
F20
F21
F5
F11
F13
F6
F12
F16
F22
F25
F30F31
F24
F29
F17
F23F26
F32
F27
F35
F41
F28
F40
F33
F34
FINAL MAP: INVERSE−DEPTH Delayed (Finite depth)
(a) (b) (c)
Figure 4: (a) Inverse-depth delayed with two observations. (b) Inverse-depth delayed until feature not aligned with robot
poses. (c) Inverse-depth delayed until finite depth.
0.1250.25 0.5 1
0
20
40
60
80
100
Final divergence
step size
% final divergence
id−l
id−u
xy−f
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency
step size
% consistent features
id−l
id−u
xy−f
0.1250.25 0.5 1
0
20
40
60
80
100
Trajectory divergence
step size
% steps divergence
id−l
id−u
xy−f
(a) (b) (c)
0.1250.25 0.5 1
0
1
2
3
4
Feature initialization step
step size
number of steps to initialize features
id−l
id−u
xy−f
0.1250.25 0.5 1
0
20
40
60
80
100
Feature usage
step size
% features used per step
id−l
id−u
xy−f
0.1250.25 0.5 1
0
20
40
60
80
100
Map consistency per step
step size
% consistent features per step
id−l
id−u
xy−f
(d) (e) (f)
Figure 5: Global comparison. Analysis of the results for different step sizes (x-axis). The algorithms used are: id-u: inverse
depth undelayed, d
min
= 0.5m. xy-f: cartesian delayed until finite depth. id-l: inverse depth delayed until feature not aligned
with robot poses.
used by the delayed algorithms even though features
initialization requires a lower number of steps (Figure
5.d.) Therefore, delayed techniques provide impor-
tant benefits due to the fact that the initial estimates
introduced into the map are better with lower covari-
ance.
7 CONCLUSIONS
In this paper we have discussed feature parameteri-
zation and initialization using bearing-only measure-
ments. Both considerably affect the results of the al-
gorithms. However, this paper shows that even with
a perfect feature parameterization, if the initialization
problem is ill-conditioned the results are inconsistent.
As conclusion we can state that in general situations
the delayed inverse depth until features not aligned
performs competitively.
An interesting result of this study is the related
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
260

to the cartesian parameterization when it is combined
with a finite depth test. It was expected that carte-
sian algorithm based in triangulation techniques were
to suffer a great degradation of their performance for
small step sizes. However, results show that the algo-
rithm delayed until finite depth with cartesian param-
eterization is not very sensitive to the step size and
exhibits very competitive results, which makes it an
appropriate algorithm for indoors. Other interesting
conclusion is that introducing features earlier in the
EKF does not mean that more/better information will
be available to update the state.
In this paper we have also stated ill-conditioned
situations: a pure rotation motion and features aligned
with the trajectory. None of them can be managed in
any case. Some ideas have been presented to detect
these situations which will allow the algorithms to de-
cide which data can be used in each step.
ACKNOWLEDGEMENTS
This work was supported by projects MEC DPI2006-
07928 and IST-1-045062-URUS-STP.
REFERENCES
Bailey, T. (2003). Constrained initialisation for bearing-
only slam. In Proc. IEEE Intl. Conf. on Robotics and
Automation, pages 1996–1971, Taipei, Taiwan.
Costa, A., Kantor, G., and Choset, H. (2004). Bearing-
only landmark initialization with unknown data asso-
ciation. In Proc. of the IEEE Int. Conf. on Robotics
and Automation, pages 1164–1770.
Davison, A. (2003). Real-time simultaneous localisation
and mapping with a single camera. In Proc. Ninth
IEEE Intl.Conf. on Computer Vision.
Klippenstein, J., Zhang, H., and Wang, X. (2007). Feature
initialization for bearing-only visual slam using trian-
gulation and the unscented transform. In Proc. IEEE
Intl Conf. on Mechatronics and Automation, pages
157–164, Harbin, China.
Kwok, N. and Dissanayake, G. (2004). An efficient mul-
tiple hypothesis filter for bearing-only slam. In Proc.
IEEE/RSJ Intl. Conf. on Robotics and Systems, vol-
ume 1, pages 736–741, Sendai, Japan.
Kwok, N. M., Ha, Q. P., Huang, S., Dissanayake, G., and
Fang, G. (2007). Mobile robot localization and map-
ping using a gaussian sum filter. Intl.Journal of Con-
trol, Automation, and Systems, 5(3):251–268.
Montiel, J. M. M., Civera, J., and Davison, J. (2006).
Unified inverse depth parametrization for monocular
slam. In Robotics Science and Systems, RSS, Philadel-
phia, Pennsylvania.
Murillo, A. C., Guerrero, J. J., and Sag¨u´es, C. (2007). Surf
features for efficient robot localization with omnidi-
rectional images. In IEEE/RSJ Int. Conf. on Robotics
and Automation, pages 3901–3907.
Neira, J. and Tard´os, J. (2001). Data association in
stochastic mapping using the joint compatibility test.
IEEE Transactions on Robotics and Automation,
17(6):890897.
Sag¨u´es, C., Murillo, A. C., Guerrero, J. J., Goedem´e, T.,
Tuytelaars, T., and Gool, L. V. (2006). Localization
with omnidirectional images using the 1d radial trifo-
cal tensor. In Proc of the IEEE Int. Conf. on Robotics
and Automation, pages 551–556.
Sola, J., Monin, A., Devy, M., and Lemaire, T. (2005).
Undelayed initialization in bearing only slam. In
IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS’05).
Trawny, N. and Roumeliotis, S. (2006). A unified frame-
work for nearby and distant landmarks in bearing-only
slam. In Proc. IEEE Intl. Conf. on Robotics and Au-
tomation.
PARAMETERIZATION AND INITIALIZATION OF BEARING-ONLY INFORMATION - A Discussion
261
