
THE ROLE OF SENSORY-MOTOR COORDINATION
Identifying Environmental Motion Dynamics with Dynamic Neural Networks
Stephen Paul McKibbin, Bala Amavasai, Arul N. Selvan, Fabio Caparrelli and W. A. F. W. Othman
Microsystems and Machine Vision Laboratory, Materials and Engineering Research Institute
Sheffield Hallam University Pond Street, Sheffield S1 1WB, U. K.
Keywords: Sensory-motor coordination, Particle Swarm Optimisation, Dynamic Neural Networks, Mobile robot
controllers, Bio-inspired controllers.
Abstract: We describe three recurrent neural architectures inspired by the proprioceptive system found in mammals;
Exo-sensing, Ego-sensing, and Composite. Through the use of Particle Swarm Optimisation the robot
controllers are adapted to perform the task of identifying motion dynamics within their environment. We
highlight the effect of sensory-motor coordination on the performance in the task when applied to each of
the three neural architectures.
1 INTRODUCTION
In situated agents, the actions that they perform are
the pre-cursor for the senses that they experience
which, in turn, are the basis for their next action.
Often it is assumed that senses are read and then
actions are made. It has been suggested that the
coordination of the action is as important as the
sensing and that the close coupling of these
behaviours is fundamental to building complex
behaviours (Nolfi, 2002b) and even knowledge
(O’Regan, 2001).
We investigate the task of a mobile robot being
able to identify the dynamics of a moving target in
its environment using only local information. In
nature this is an important skill that enables animals
to hunt prey, evade predators and also to
communicate with gesture or dance. The work is an
extension of the experiment by (McKibbin et al,
submitted for review) where three recurrent neural
architectures are evaluated however in this paper, a
comparison is drawn between those controllers that
are allowed to invoke Sensory-Motor Coordination
(SMC) in their motion strategy and those that are
not. The controllers have been designed in such a
way that they can be conceptually defined by a
number of features. This definition makes the study
of the effect of each feature more apparent.
The controllers that are prevented form using
SMC are given a pre-trained set of weights that
control their movement and these weights are not
adpated throughout the optimisation process. Each
controller is given the same pre-trained weights
allowing a comparison to be drawn between them
and also with the controllers that are free to adapt
their motion strategy. The work carried out in this
paper is an extension of previous work by the author
(McKibbin et al, submitted for review) and focuses
on the role of SMC in simplifying or complicating a
task that requires some amount of deliberative
processing.
2 TASK DESCRIPTION:
IDENTIFYING MOTION
DYNAMICS
The task under investigation in this paper requires a
mobile robot to discriminate and identify the two
phases of the trajectory of a moving target object
using only local information (McKibbin et al,
submitted for review).
The robot used in the task is a simulated version
of the Khepera II robot from k-team, it is cylindrical
in shape with a diameter of 32mm and it is simulated
in the Webots 3D fast prototyping software package
from Cyberbotics. The robot has two wheels
controller by independent motors (m0 and m1) that,
when spun in opposite directions, allow the robot to
rotate on the spot. It has 8 IR sensors (ds0 – ds7)
129
Paul McKibbin S., Amavasai B., N. Selvan A., Caparrelli F. and A. F. W. Othman W. (2008).
THE ROLE OF SENSORY-MOTOR COORDINATION - Identifying Environmental Motion Dynamics with Dynamic Neural Networks.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 129-136
DOI: 10.5220/0001495101290136
Copyright
c
SciTePress
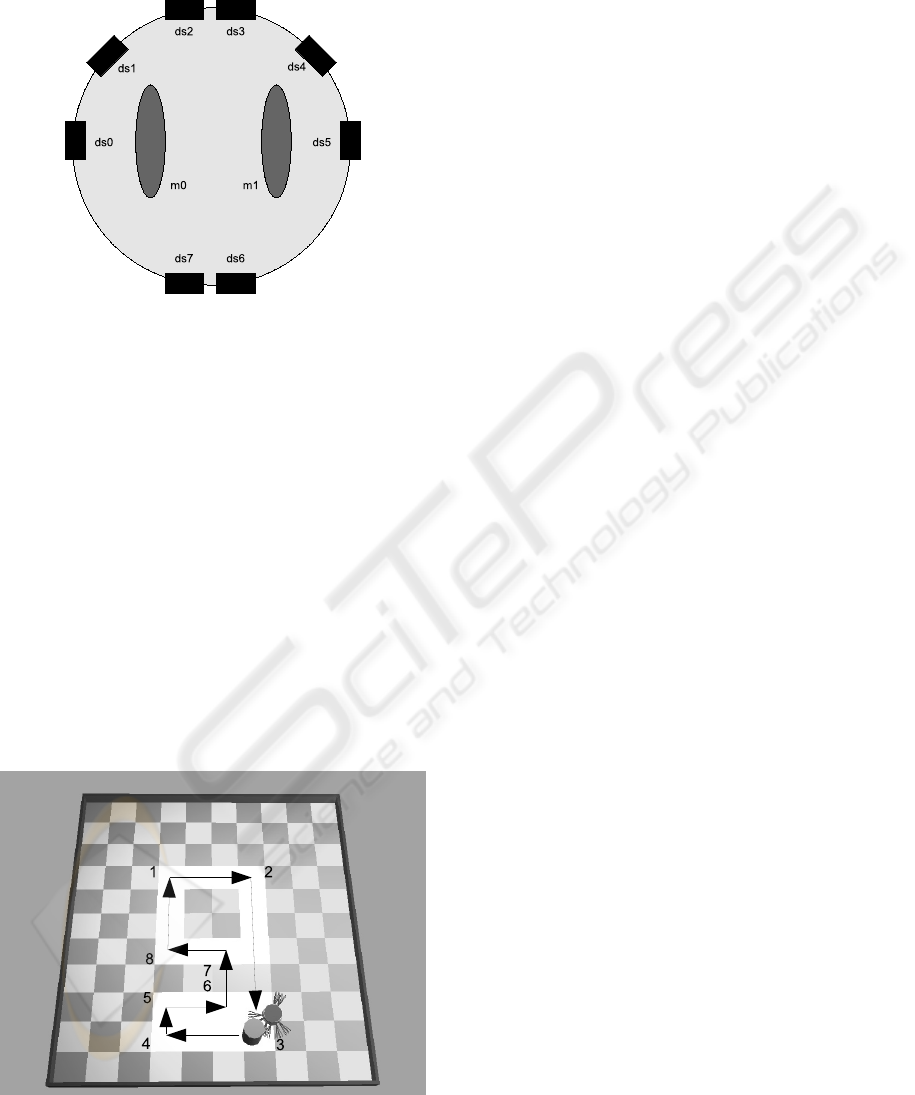
distributed around its perimeter and the particular
configuration of the sensors is shown in figure 1.
Figure 1: A functional diagram of the Khepera robot
showing the configuration of the IR sensors (ds0 – ds7)
and the motor driven wheels (m0, m1).
The target object moves in a bounded arena with
a constant “figure of 9” trajectory as shown in figure
2. It moves with a constant speed and takes no input
from the environment and will not stop if confronted
with an obstacle i.e. a robot. The size and shape of
the target are approximate to that of the robot, being
cylindrical in shape with a radius of 32mm. Since
the shape of the target is cylindrical its sensory
profile will remain the same from which ever angle
it is sensed and on its trajectory as it changes
direction and turns corners this sensory profile will
remain unchanged from the point of view of the
robot. As a result of this uniformity of shape, there is
only one distinguishing feature of the target and that
is the dynamics of its motion plan; the path of its
trajectory.
Figure 2: Screenshot of the arena showing the robot next
to the target. The arrows indicate the target’s straight
edged “figure of 9” trajectory.
The targets trajectory is considered to have two
phases, the lower part of the loop, phase0,
comprising of a flat horizontal rectangular shape,
and the upper part, phase1, comprising of a regular
square-like shape. The task for the robot is to follow
the target and to decide which phase of the trajectory
it is currently executing and to display this using an
output LED. When the LED is switched on it
denotes phase1 and when it is off it denotes phase0.
The task has 2 parts;
1) Follow the target through the “figure of 9”
loop, keeping it within sensory range
2) Indicate at each time step which phase of its
trajectory the target is currently performing
Part 1 of the task is a predicate for part 2. Since
the only sensory information available to the robot is
that provided by its IR sensors, in order to decide
which part of the loop the target is in at any given
time, the robot should be able to sense it. The only
way the robot can sense the target is when it is at
close range (<50mm). As detailed in Section 4.2, the
robot needs to remain close to the target at each time
step in order to gain fitness.
Considering part 2 of the task, the robot must be
able to discriminate the two phases of the trajectory
using only local information. As we have already
described, the sensory profile of the target remains
constant throughout each phase. The target moves in
straight lines and takes corners at 90 degrees for
each turn. The transition from one phase to another
is performed in a straight line through the grey
banded “no man’s land”. This locally uniform
motion does not give any clue to the transition
between phases. In view of these constant and
regular conditions, there are no explicit signals or
sensory states presented to the robot to aid it in its
identification task. There is no single sensory state
afforded by its environment that would allow the
robot to distinguish the two phases of the targets
movement. The robot must incorporate an ability to
add context to its current sensory information and,
depending on the context, identify the current
trajectory of the target.
3 RECURRENT NEURAL
NETWORK CONTROLLERS
The neural networks examined for this task are
DNNs with update functions that take into account
previous activation levels when producing new
activations. The architectures of the networks are
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
130
inspired by a rough model of how the human body
uses internal and external senses. The use of the
combination of external and internal senses is called
proprioception and it is this feedback system that
allows the human body to modulate its behaviour.
For example, it is through the use of proprioception
that we are able to touch our nose with our finger
whilst we have our eyes closed. Motor commands
are sent to the muscles to cause actions and so too
sensory signals are returned for processing to
provide closed loop control. The mechanisms used
to process these flows and contra-flows of
information are still active areas of research in
biology.
We describe 3 types of DNN below, each of
which have an input layer, a fully connected hidden
layer and an output layer. Each of the 3 architectures
uses different types of recurrent feedback. We have
named the 3 types of DNN Ego-sensing, Exo-
sensing and composite. They are so named due to
the type of sensing they employ;
1. The Ego-sensing controller takes the output
of the previous motor actions as inputs to
the hidden layer.
2. The Exo-sensing controller takes inputs to
the hidden layer only from the IR sensors.
3. The Composite controller uses inputs to the
hidden layer from both the motor actions
and the IR sensors.
The input layer consists of 6 input nodes each
connected to one of the 6 frontal IR sensors of the
robot. The actual input value is the IR activation
normalised in the range [0, 1]. There is also a bias
node which provides a constant input of 1. This
layer feeds forward only to the motor outputs in the
Ego-sensing architecture, in the Exo-sensing and
Composite architecture it also feeds forward to the
hidden layer and the IDU output. The hidden layer
consists of 5 nodes that are fully connected to each
other also with recursive connections that encode the
hidden node activation at the previous time step. The
input to the layer is the weighted sum of all its inputs
and each node operates with the logistic transfer
function however the output of each node is both a
function of its current inputs and its previous output
(Nolfi, 2002a). In each of the 3 types of controller
this layer feeds forward to the IDU output but does
not connect to the motor outputs. The update
equation for the hidden nodes is given in (1).
hidden_unit_out
i
=
√(mem_coef
i
*hidden_unit_out
i
) +
(1 - √(mem_coef
i
*hidden_unit_out
i(t-1)
)
(1)
Where hidden_unit_out
i
is the output of the
current hidden node in the supervisory layer and
mem_coef
i
is the memory coefficient associated with
the current node in the supervisory layer. The
memory coefficient for each hidden node is an
encoded parameter in the PSO algorithm and is
bound in the range [0, 1]. This parameter determines
to what extent a hidden node is affected by its
current inputs and its previous outputs. This has the
effect of altering how quickly a particular node
reacts to changes at its inputs.
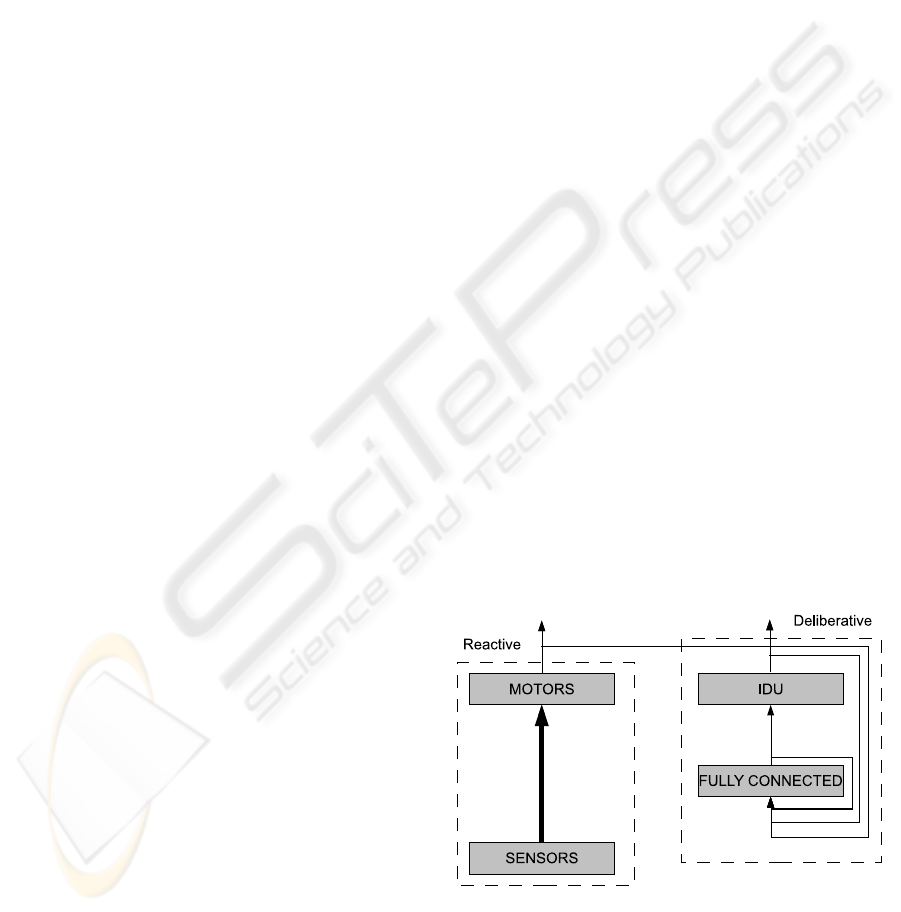
3.1 Ego-Sensing Controller
The architecture for the Ego-sensing controller
consists of 2 parts. The first part is a purely reactive
system that connects the sensors at the input directly
to the motors with weighted connections. The
second part consists of a fully connected hidden
layer containing recursive feedback loops that takes
input from the sensors and feeds forward to the
Identification Unit (IDU). In an analogy with natural
systems, the first part is similar to the reflex system
found in mammals where motor actions are coupled
closely to sensory input and the second part is
loosely based on the afferent signal feedback system
in proprioception that processes self-initiated motor
actions. Figure 3 shows the reactive part on the left
with the connections directly from the sensors to the
motor shown with the thick arrow and the
deliberative part on the right with connections from
the outputs of the motors and the IDU feeding back
into the hidden layer. These connections are
weighted and they connect to each node in the
hidden layer. The hidden layer only connects to the
IDU and is thus the decision maker.
Figure 3: The architecture of the Ego-sensing controller.
The thick arrow indicates the reactive part of the network.
THE ROLE OF SENSORY-MOTOR COORDINATION - Identifying Environmental Motion Dynamics with Dynamic
Neural Networks
131
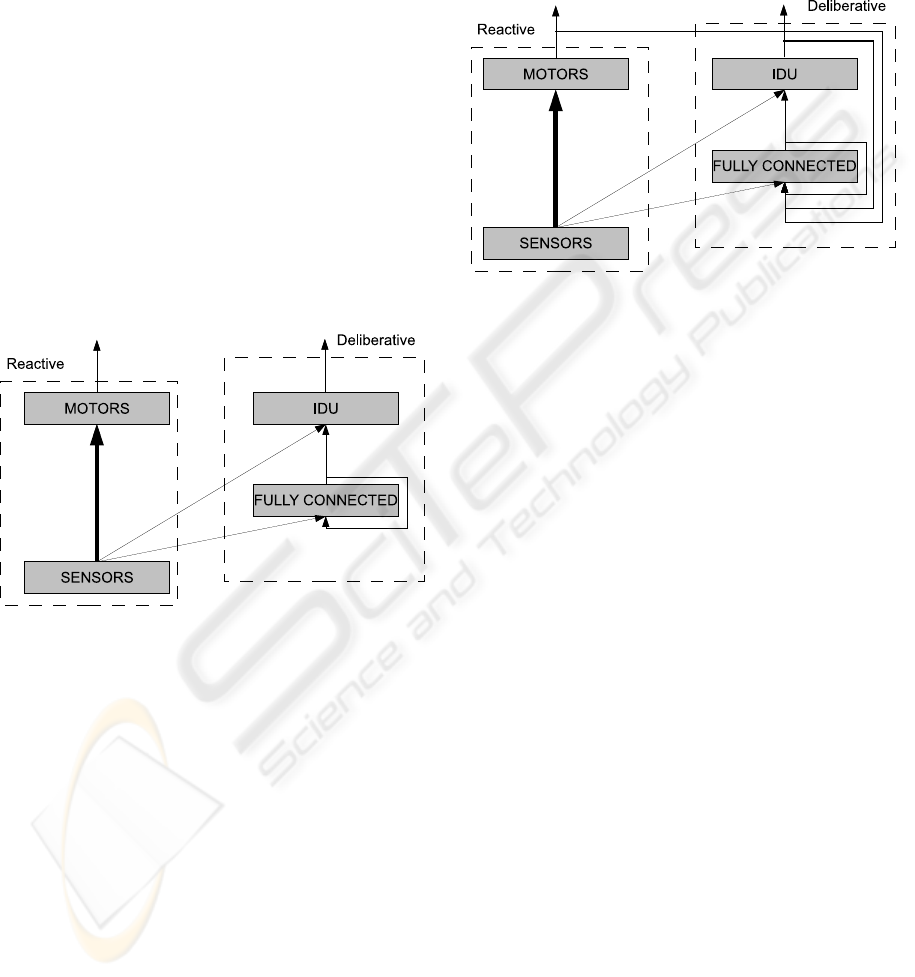
3.2 Exo-Sensing Controller
The Exo-Sensing controller also has two parts, the
reactive part with its direct coupling to the motors
and the deliberative part which processes
information over time that feeds forward to the IDU.
In the Exo-Sensing controller however, the input to
the fully connected hidden layer comes from
external information sensed by the sensor nodes.
There are no feedback connections from the output
layer thus providing no information on internal
states or actions. There is still feedback in this
controller however, provided by the recursive
connections in the hidden layer. The analogy for the
this controller is the exteroceptive sensing system
found in mammals that respond to stimuli
originating outside the body such as the sense of
touch, smell, sight and sound. Figure 4 shows the
input connections from the sensors that feed forward
to the hidden layer and to both the motor outputs and
the IDU output.
Figure 4: The architecture of the Exo-Sensing controller.
The thick arrow indicates the reactive part of the network.
3.3 Composite Controller
The Composite controller as shown in Figure 5 is a
hybrid of the Exo-Sensing and the Ego-sensing
controllers described previously. Again this
controller has two parts, the reactive part which is
the same as the other two controllers and the
deliberative part. The deliberative part in this
controller takes inputs both from the outside world
using its IR sensors and from its internal states and
actions provided by the feedback inputs from the
output layer. In fact a truer description would be that
the previous two controllers are a decomposition of
the composite controller. This represents a more
complete system as found in nature where organisms
are furnished with sensory information from the
outside world along with information of their own
internal state. An example of this would be moving
one’s hand through space, whilst watching it move
and feeling it move at the same time. The structure
of the composite controller is shown in Figure 5 with
connections to the hidden layer from both the
external sensors and from the feedback from the
output layer.
Figure 5: The architecture of the Composite controller.
The thick arrow indicates the reactive part of the network.
3.4 Pre-Trained Reactive Controller
For each of the three types or architecture detailed
above, there are 2 sets of experiments carried out. In
the first set, all of the weights for each of the
connections shown in figures 3 – 5 are allowed to
adapt freely throughout the adaptation process. In
the second set of experiments, the weights of the
connections from the sensors to the motors,
indicated by the thick arrow in each figure, are not
adapted by the PSO algorithm. The weights
associated with these connections are fixed and are
taken from a pre-trained architecture which was
trained only on its ability to follow the target. By
comparing the performance of the architectures in
each of the two experiments we should be able to
highlight the role of sensory-motor coordination in
their identification strategy. The pre-trained
architecture used is the same as the reactive part of
the network in each of the architectures, without the
hidden layer and the IDU output. Figure 6 shows the
details of the reactive network that was trained only
on its ability to follow the target. This can be
considered an expansion of the boxes labelled
“MOTORS” and “SENSORS” and the connections
between them in figures 3 – 5.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
132
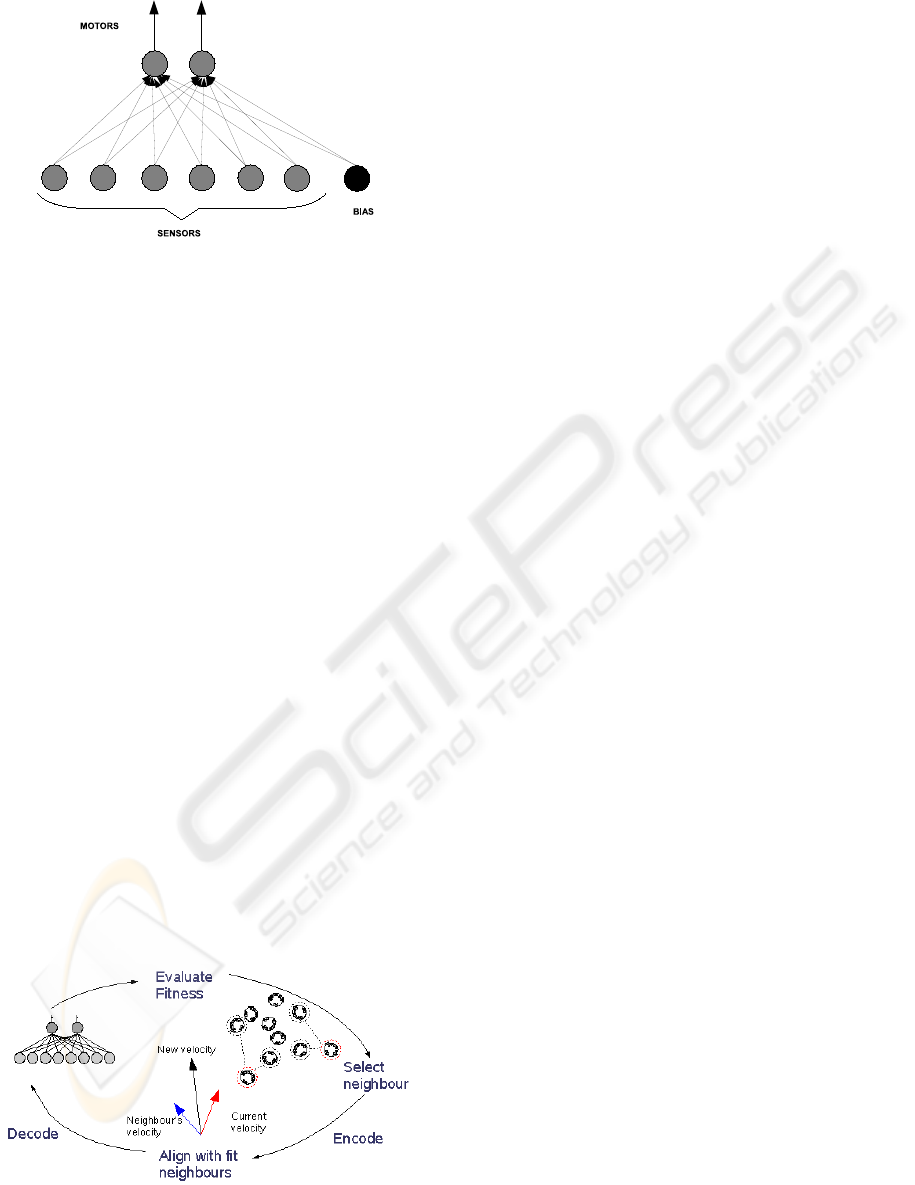
Figure 6: Reactive architecture used to obtain the pre-
trained weights for the second set of experiments.
4 PSO FOR ADAPTATION
In this paper, we employ Particle Swarm
Optimisation (PSO) to adapt the weights of a robot
neural controller. It is a bio-inspired technique that
was introduced by Kennedy and Eberhart (Kennedy,
1995) and draws inspiration from the flocking
models of birds and fish.
The free parameters, n, of an individual robot
controller are represented as the position of a single
particle that is flying through an n-dimensional
hyperspace. The particle updates its velocity at each
iteration based on its own previous best position,
pbest, and also the previous best position of its
neighbours, nbest. With time, the particles tend to
explore the solution space and, by sharing
information on the areas each of them have covered,
converge on good solutions.
The methodology for applying PSO to
adaptation in robotics is akin to that used in
Evolutionary Robotics (ER). A similar iterative
process is used for PSO in robotics, however, the
selection methods and update operators are PSO
specific. Figure 7 shows the basic methodology and
iterative process of the PSO algorithm.
Figure 7: PSO in robotics.
4.1 PSO Parameters
The PSO used in this work was the constriction
factor version that was developed by (Clerc, 1999).
v
i
= K(v
i(t-1)
+ c
1
r
1
(p
i
- x
i
) + c
2
r
2
(p
g
- x
i
))
K = 2/(| 2 - φ - √(φ² - 4φ)|) ,
φ = (c
1
+ c
2
),
φ > 4
Where:
K = constriction factor
v
i
= velocity
x
i
= position
p
i
= own best position
p
g
= group best location
c
1
= constant weight of attraction to own
best location
c
2
= constant weight of attraction to group
best location
r
1
& r
2
= uniform random variables in the
range [0,1]
(2)
This version of the algorithm has been shown to
always converge towards a solution (Clerc, 2002)
for a particular range of parameters. The constriction
factor version of the algorithm is given in (2).
Some standard parameter settings are used rather
than trying to tune the algorithm using empirical
methods to be problem specific (Eberhart, 2000).
The constriction factor, K, has been set to 0.729 and
the cognitive coefficient and the social coefficient
(c
1
and c
2
) have both been set to 2.05.
The free parameters of the controller that are to
be adapted include the dynamic range of the
weights, which are randomised in the range [-10, 10]
and the memory coefficient, that has been
randomised in the range [0, 1]. These two
parameters are encoded to represent a particle’s
position vector. Each particle’s velocity vector is
also initialised to a random value in the same range
as the position vector. The velocity and position
vectors are also hard-limited to the range [-10, 10]
throughout the adaptation process. A population size
of 40 particles has been used for the swarm. This
value was achieved through empirical testing and is
an acceptable compromise between performance and
training time. The neighbourhood topology used for
each experiment is the ring topology with a
neighbourhood size of 3. Each particle has 2
neighbours and since the neighbourhood size is
restricted, the current particle can be its own
neighbourhood best particle.
THE ROLE OF SENSORY-MOTOR COORDINATION - Identifying Environmental Motion Dynamics with Dynamic
Neural Networks
133
4.2 Fitness Function
Per iteration of the algorithm, each robot is allowed
to live for 4 epochs of 2500 time steps of 96ms each.
An epoch is ended early if the robot crashes. At the
beginning of each epoch, the robot is place close to
the target in one of each of the four starting
positions; 2 in the part0
The fitness function (4) for the task has two
parts. The first part rewards for staying close to the
target object as it moves along its trajectory. The
definition of “close” here is that the robot must be
within sensory range of the target. For each time
step that the robot is close to the target
found_target_count is incremented. Fitness is given
as the percentage of the total time (4 epochs x 2500
life steps) that the robot is close to the target. If
found_target_count is greater than threshold, then
the second part of the fitness function is evaluated
and the first part is ignored.
For the pre-trained Reactive Controller, only the
first part of the fitness is evaluated since this
network has no identification output. The result is a
controller that consistently follows the target well
and attains maximum fitness in doing so.
The second part of the fitness function rewards
for the robot correctly identifying which part of its
trajectory the target is currently in. Figure 6 shows
the trajectory of the target and the robot, with its
projected IR sensor beams, next to it. The white
square shape in the upper part indicates phase1 of
the trajectory and the white rectangle shape in the
lower part indicates phase0. The grey band between
the two phases represents “no man’s land” where no
reward is given as the robot and target travel
between the two phases. The identified_
phase0_count is incremented for each time step that
the robot correctly identifies phase0 of the trajectory
and identified_phase1_count is incremented for
correctly identifying phase1. The second part of the
fitness function uses these values represented as
percentages of the correct identifications for each
phase.
fitness = (found_target_count /
max_life_span)
(4)
if(found_target_count > threshold)
fitness = 1 + (perc_identified_phase0 *
perc_identified_phase1)
where:
max_life_span
= number of epochs * life span
= 10000
threshold
= max_life_span * 0.8
= 8000
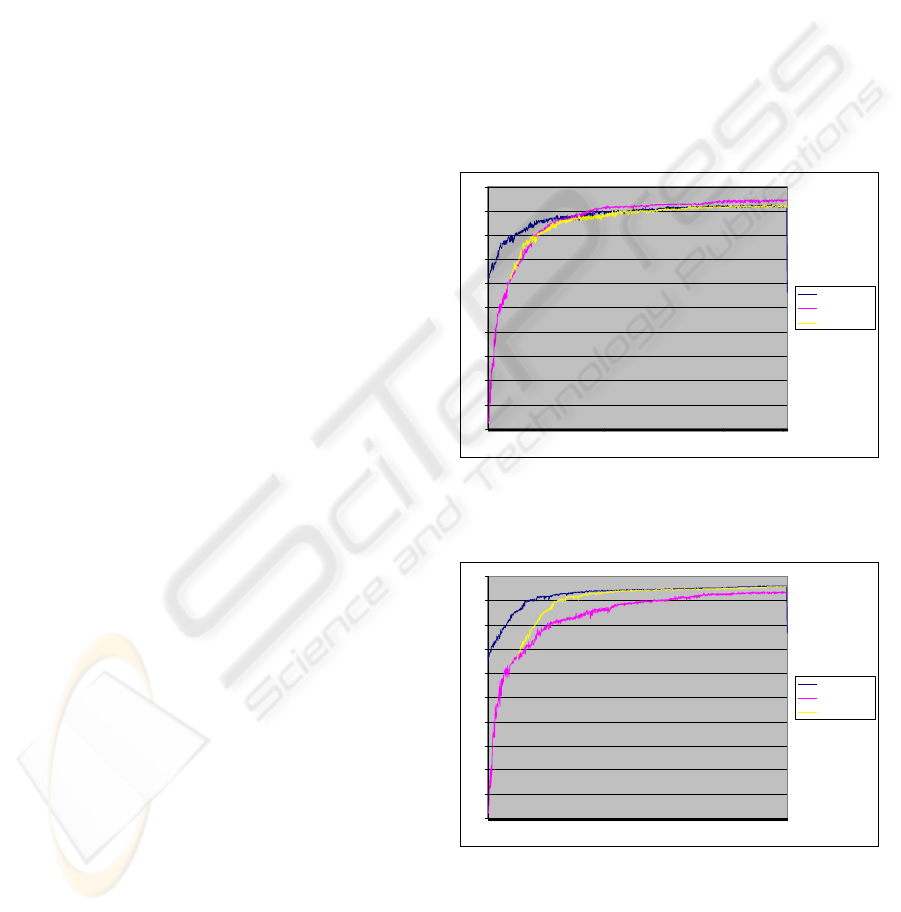
5 RESULTS
For each of the neural network architectures and
both the fixed and non-fixed weight test, the
experiment was run 10 times and the fitness data
was recorded and averaged. Figures 8a, 8b and 8c
show the plots of the training data. Each plot shows
the fixed weight training data and also the same data
shifted to the right to the point where the non-fixed
weight controller achieves a similar fitness score.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 101 201 301 401 501 601 701 801 901
ego2_fix_avg
ego2_avg
ego2_fix_shift
Figure 8a: Training data of the best individual at each
iteration for the Ego-sensing controller. Maximum
theoretical fitness is 2.0.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 101 201 301 401 501 601 701 801 901
exo3_fix_avg
exo3_avg
exo3_fix_shift
Figure 8b: Training data of the best individual at each
iteration for the Exo-sensing controller. Maximum
theoretical fitness is 2.0.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
134

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 101 201 301 401 501 601 701 801 901
comp2_fix_avg
comp2_avg
comp2_fix_shift
Figure 8c: Training data of the best individual at each
iteration for the Composite controller. The plots in figures
8a, 8b and 8c show the data from both the fixed weight
and non-fixed weight training. Also the fixed weight data
is shown shifted so the fitness scores start at the same
point to aid in their comparison. Data is averaged over 10
runs. Maximum theoretical fitness is 2.0.
The reason for this is to make the comparison
between the experiments more clear. The controllers
in the non-fixed weight experiment had to learn to
complete the following part of the task, part 1,
before they could gain any fitness from the
identification part, part 2. The fixed weight
controllers in each case made use of the pre-trained
reactive weights and so where already able to
complete part 1 of the task from the start of the
adaptation process.
The Ego-sensing controller was the only one of
the three architectures that performed less well when
the motion strategy of the robot was not allowed to
adapt along with the identification strategy. For the
other two architectures, when the weights
controlling robot’s motion strategy were fixed, they
were both able to train faster on the identification
task and achieve a higher maximum score.
comparison of fixed-weight averages
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 101 201 301 401 501 601 701 801 901
exo3_fix_avg
ego2_fix_avg
comp2_fix_avg
Figure 9: Training data of each of the three architectures
for the fixed weight version of the experiment. Data is
averaged over 10 runs. Maximum theoretical fitness is 2.0.
When comparing the three architecture types of
the fixed weight experiment, it is clear from figure 9
that the Ego-sensing controller also performs the
worst with a highest average score of 1.851. The
Exo-sensing controller and the Composite
controllers perform similarly well scoring highest
average scores of 1.921 and 1.925 respectively.
6 DISCUSSION
For the non-fixed weight experiment, each of the
controllers was able to quickly adopt a target
following behaviour. For each architecture this took
between 43 and 44 iterations. This shows that each
controller was able to learn a good motion strategy
that enabled it to remain close to the target object at
all times and that also prevented it from crashing
into the target as it suddenly changed direction when
turning corners.
In the fixed weight experiment each controller
used the same pre-trained weights from the reactive
architecture and so all of them were instantly able to
follow the target without crashing. All fitness scores
above 1.0 are attributed to the robot’s ability to
identify the phase of the target’s trajectory. Each of
the fixed weight fitness scores start above 1.0 due to
the chance level of identification ability they might
have.
When the Ego-sensing controller’s performance
in the fixed weight experiment is compared to non-
fixed weight experiment, the controller performs
better when it is allowed to adapt its own motion
strategy. The reason for this may be that the
information that is fed to the hidden layer in the
Ego-sensing controller is somewhat bland (only 2
inputs instead of 6 in the Exo-sensing version). The
Ego-sensing controller uses only its own outputs as
inputs the hidden layer and these outputs are in fact
a function of the sensor inputs. The motion strategy
used in the fixed weight experiment was not adapted
to aid in the completion of the identification task and
was used only as a method to allow the robot to
remain close to the target. This fixed motion strategy
combined with the fact the that the inputs to the
hidden layer were not as rich in patterns as some of
the other controllers may have made it harder for the
Ego-sensing controller to perform the identification
part of the task without being able to adapt its
sensory-motor coordination and thus its motion
strategy.
The Exo-sensing controller was able to perform
better in the fixed weight experiment than the
experiment where it was free to adapt its own
THE ROLE OF SENSORY-MOTOR COORDINATION - Identifying Environmental Motion Dynamics with Dynamic
Neural Networks
135

motion strategy. In the fixed weight experiment it
trained faster and reached a higher maximum
average score. Similarly the Composite controller
performed better when the weights controlling its
motion strategy were fixed. Both of these controllers
had inputs to their hidden layer from the six IR
sensors. Since this data was the raw instantaneous
sensor values, the patterns will have contained much
more information than was available to the Ego-
sensing controller. The Composite controller also
had the ego-sensing data as inputs to its hidden layer
and it scored the highest maximum average score of
the three architectures.
In previous work by the author (McKibbin et al,
submitted for review) a study of the nature of the
information being fed to the hidden layer revealed
that the fast changing sensor (exo-sensing) data can
make it more difficult for the controller to learn
slower changing temporal patterns. Conversely, the
slower changing output (ego-sensing) data seemed
to be more useful to the controller to be able to learn
the temporal patterns more quickly. However each
of the controller types was able to identify the target
trajectory with similar success after training for 1000
iterations. The main difference between the
architectures was the time taken to train. From the
experiments in this work however, it is clear that
when the motion strategy is fixed and not adaptable,
the controllers perform differently. The controllers
that had the fast changing sensor data available to
them (Exo-sensning and Composite controllers)
were more able to perform the identification task
than the controller with only the slower changing
output data (Ego-sensing controller). In the latter
case, it seems to be that the restriction of the
richness of the sensor information available to the
controller combined with it not being able to invoke
its own sensory-motor coordination strategy has
inhibited it.
It should be noted that in the fixed weight
experiment, every individual was initialised with the
weights that exhibited a pre-trained following
behaviour. This meant that every member of the
population could begin to optimise the controller for
the second part, the identification task. In the non-
fixed weight experiment only the individuals who
were able to complete the following part of the task
could gain fitness in the identification task. It should
be noted that even after 1000 iterations only 75% of
the members had learnt the following task.
7 CONCLUSIONS
This paper has presented a study of the performance
of three recurrent neural robot controllers in
identifying environmental motion dynamics.
Although all three can perform the task well, we
have shown that there are significant differences in
performance when sensory-motor coordination is
eliminated from their motion strategy. We have
highlighted the utility of DNNs as mobile robot
controllers and suggest further investigation into the
role of sensory-motor coordination in aiding
complex robot tasks.
ACKNOWLEDGEMENTS
This work has been supported by the I-SWARM project,
European FP6 Integrated Project, Project No. 507006.
REFERENCES
McKibbin, S.P., Amavasai, B., Selvan, A.N., Caparrelli,
F., Othman, W.A.F.W, 2007. Recurrent Neural Robot
Controllers: Feedback Mechanisms for identifying
Environmental Motion Dynamics. Submitted.
Clerc, M., 1999. The swarm and the queen: towards a
deterministic and adaptive particle swarm
optimization. In Proceedings of the 1999 ICEC,
Washington DC, pp1951-1957.
Clerc, M., Kennedy, J., 2002. The particle swarm -
explosion, stability, and convergence in
amultidimensional complex space. In IEEE
Transactions on Evolutionary Computation, vol. 6,
issue 1.
Eberhart, R.C. Shi, Y., 2000. Comparing inertia weights
and constriction factors in particleswarm optimization.
In Proceedings of the 2000 Congress on Evolutionary
Computation.
Kennedy, J., Eberhart, R.C., 1995. Particle Swarm
Optimisation. In Proceedings of the IEEE Int. Conf.
Neural Networks.
Nolfi, S., 2002a. Evolving robots able to self-localize in
the environment: The importance of viewing cognition
as the result of processes occurring at different time
scales. In Connection Science, vol. 14 issue 3.
Nolfi, S., Marocco D., 2002b. Active perception: A
sensorimotor account of object categorization. In
From Animals to Animats. In B. Hallam, D. Floreano,
J. Hallam, G. Hayes, J-A. Meyer (eds.) Proceedings of
the VII International Conference on Simulation of
Adaptive Behavior. Cambridge, MA: MIT Press, pp.
266-271.
O’Regan, J. K., Noe, A., 2001. A sensorimotor account of
vision and visual consciousness. In Behavioral and
Brain Sciences, 24(5):939-73.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
136
