
COOPERATIVE LOCALIZATION
Self-configuring Procedure of a Multi-robot Localization System with Passive
RFID Technology
Mikko Elomaa, Aarne Halme
Automation Technology Laboratory, Helsinki University of Technology, Espoo, Finland
François Vacherand
Laboratoire d’Electronique et de Technologie de l’Information, CEA, Grenoble, France
Keywords: RFID, Multi-robot, cooperative, localization.
Abstract: This preliminary simulation study introduces methods to configure a low cost localization system based on
existing passive RFID technology. A group of small robots work together in order to configure the system
autonomously. Probabilistic estimation methods are used for data fusion. The robots should be able to build
and expand the localization system without human aid. When properly configured the system is able to offer
positioning information with bounded error. The use of passive RFID tags as beacons makes the cost of
expanding the robots' working area negligible.
1 INTRODUCTION
For a successful task execution a mobile robot has to
know its position and heading. Different kinds of
localization methods have already been developed.
There are systems where all the needed equipment
for the localization (wheel encoders, gyroscopes,
laser scanner, etc.) is on board the robot. One
problem with this kind of localization system is that
over time the robot's estimate of its absolute location
can get too erroneous for effectively continuing the
mission. Also the cost of the high precision
equipment can be considerable.
Another approach is to use external references
such as beacons or landmarks for localization. The
mobile robot can use absolute position data provided
by measurements and calculations involving these
external objects in order to obtain a better position
estimate. The main problem with this kind of system
is that the installation of the required external
objects can be costly and time consuming.
The system introduced in this paper uses passive
RFID tags as beacons. A passive RFID tag contains
an antenna and an IC with small (0-1kbit) memory
capacity. It operates on the power obtained from the
reader antenna. A typical operating range for a
900MHz system is up to 2 meters. The cost of one
tag is only a few cents and it does not need external
connections or a power supply. Also the sticker-like
tags are light to carry and a robot can place them on
suitable spots when moving to new working areas.
A multi robot approach is used for the system
configuration in order to replace the need of highly
accurate sensors for robot's localization in the initial
phase. Using a group of robots instead of one robot
also gives better fault tolerance as a single fault will
not endanger the whole mission.
2 RELATED WORK
Several studies have already been made on passive
RFID localization in robotics using a mobile RFID
reader (Hightower et al. 2000; Hähnel et al. 2004;
Bohn 2006; Kulyukin et al. 2004 and Kleiner et al.
2006). All of these are very different from each
other. Kulyukin et al. use a RFID system for
recognition of specific places inside a building. The
system is intended to help visually impaired people
recognise specific office doors, elevators, etc.
Kleiner et al. have been successfully using RFID
tags for sharing mission related information in a
99
Elomaa M., Halme A. and Vacherand F. (2008).
COOPERATIVE LOCALIZATION - Self-configuring Procedure of a Multi-robot Localization System with Passive RFID Technology.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 99-102
DOI: 10.5220/0001493800990102
Copyright
c
SciTePress
rescue scenario involving both robots and humans.
Bohn introduces a super-distributed RFID tag
infrastructure, where mobile objects may leave
virtual traces in the physical space they traverse by
writing an ID to the tags in the floor (up to 120
tags/m
2
) while passing directly above them.
Hightower et al. have designed a system to help
people to localize objects equipped with passive
RFID tags in their vicinity.
Hähnel et al. study the problem of localizing
RFID tags with a mobile platform equipped with a
laser scanner and a pair of fixed RFID antennas. A
probabilistic sensor model of each antenna is used to
estimate location of a detected tag. When a tag is
detected for the first time a set of 1000 randomly
chosen positions around the robot are chosen for
initial estimates of the location of the tag. With each
measurement the probability of these locations is
calculated according to the sensor model. This is a
single robot approach where the robot builds a
database of tag positions. When localizing a robot
with the RFID tags and odometry the position error
was about 1 m.
The system proposed in this paper is based on
similar technology as the aforementioned system by
Hähnel et al. However, there are three major
distinctions. Our approach uses several simple
robots instead of one sophisticated robot. Instead of
one database, the localization data is distributed to
the tags. Also the relative displacement between the
robot and a tag is based on measured bearing angles
and not on a simple sensor model.
3 OPERATING PRINCIPLE
Our key interest is in developing a self configuring
localization system using a group of simple,
inexpensive robots. The idea is that even if the
robots have only wheel encoders and an RFID
reader for localization purposes they should be able
to localize themselves within bounded error. An
RFID reader is placed on each robot and stationary
tags are placed around the working area of the robot
group. The tags can be distributed by humans or by
robots if they are equipped with an appropriate
system (Kleiner et al. 2006)
The cooperative localization is based on a simple
Kalman filter. When the robots are configuring the
system and localizing the tags the main source of
error is the accumulated odometry error which, on a
group of robots, is assumed to follow roughly a
Gaussian distribution. Thus when the location
estimates of several independent robots on a
common object are combined, the location estimate
of the object converges towards the correct position.
3.1 System Operation
In the beginning the passive RFID tags contain no
data. The robots start at some chosen reference
location. A robot uses wheel encoders in order to
keep track of its current position. When a robot
detects an RFID tag it calculates an estimate for the
location of the tag. The estimate of the tag's location
has an uncertainty, which is calculated each time the
tag's location is estimated. The necessary algorithms
are explained in chapter 3.2.
The location estimate and the uncertainty are
stored in the memory of the tag. The next robot that
detects the tag reads the information found on the
tag and calculates a new estimate for the location of
the tag by combining the information stored in the
tag with the new measurements.
As soon as there is a position estimate stored in
the tag's memory the robots can use the tag as a
beacon in order to correct their own position. When
exploring new areas the robots have to return often
to areas with well localized beacons in order to
maintain reasonable estimate of their own position.
3.2 RFID Localization
The RFID localization is based on the measured
bearing angle to a beacon represented by a passive
RFID tag. The antenna of the RFID reader is turned
one full circle while trying to contact tags near the
robot. For each detected tag a bearing angle is
calculated based on the sector where the tag
responded to the calls of the RFID reader.
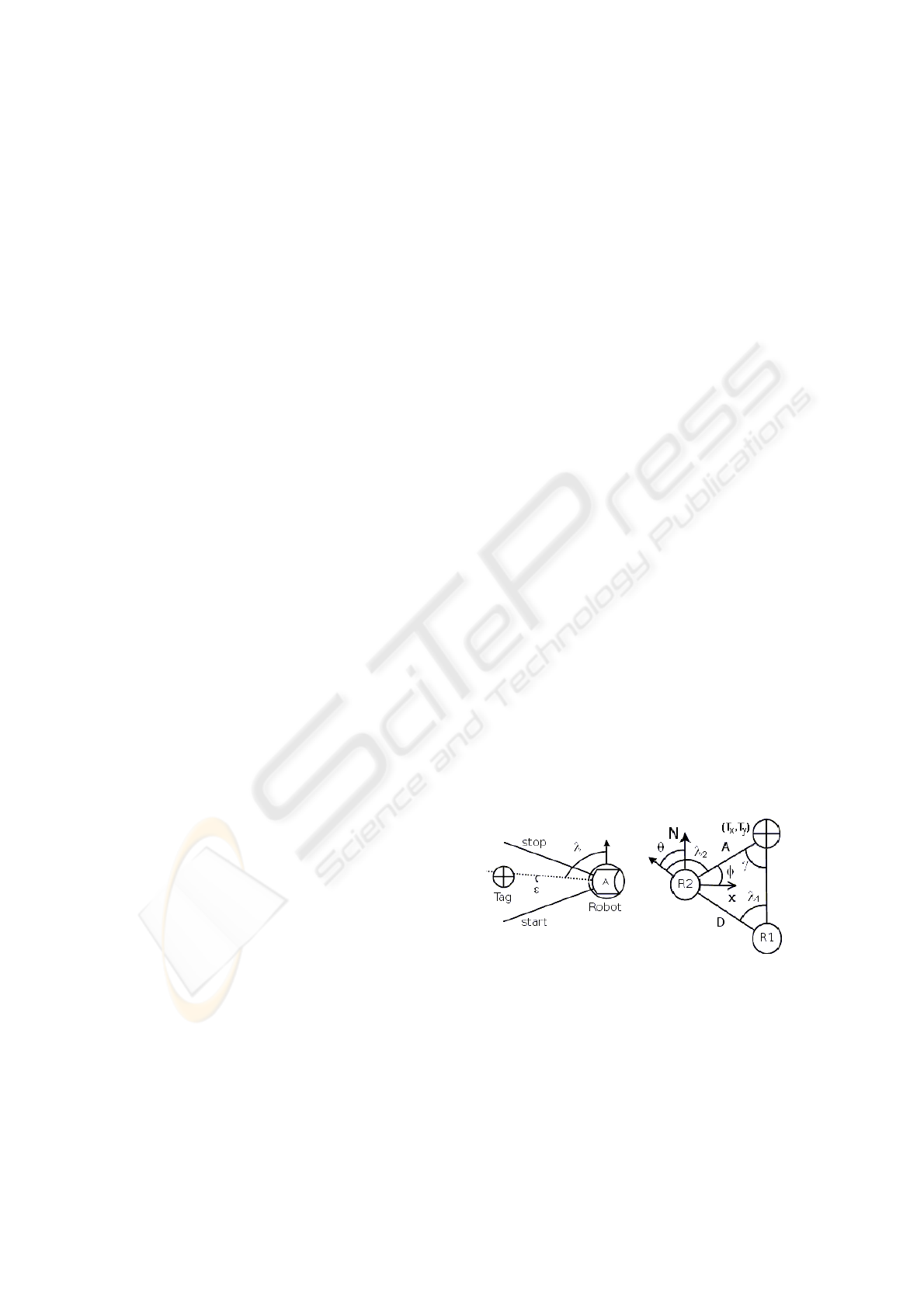
Figure 1a: Bearing angle estimation for a single RFID tag.
1b: Tag localization method.
The Figure 1a shows how the bearing angle of the
tag is estimated. The start and stop angles define a
sector where the tag responded to the readers calls.
The bearing angle estimate λ is obtained by solving
for the middle of the sector and subtracting the
a)
b
)
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
100

systematic error ε. The systematic error depends on
the geometry of the antenna and the immediate
surroundings of the antenna's mounting place. It
must be defined separately on each robot unless the
robots and the antennas are exactly alike.
3.2.1 Tag Localization
The robot uses bearing angle measurements and
odometry data in order to estimate the tag location
(E
x
,E
y
). In Figure 1b places R1 and R2 represent two
places where the robot has measured a relative
bearing angle to the tag. The distance A to the tag is
solved from the displacement D between the
measurement places and the gamma angle. The
absolute bearing angle φ is calculated as a function
of the measured relative bearing angle λ
2
and the
robot's estimated heading angle θ. A variance is
calculated for each tag location estimate. The x- and
y-coordinates have different variances which depend
on the angle φ. The C and G are parameter constants
||
12
λλ=γ −
(1)
(
)
γ
λD
=A
sin
sin
1
⋅
(2)
2
2
λ+θ
π
=φ −
(3)
()
()
φa+r=E
φa+r=E
yy
xx
sin
cos
⋅
⋅
(4)
2
21
2
21
2
sin
2
cos
γ
λλ
+φG
+C=var
γ
λλ
+φG
+C=var
y
x
⏐
⏐
⏐
⏐
⏐
⏐
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
⏐
⏐
⏐
⏐
⏐
⏐
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
(5)
With each new angle measurement the robot
calculates location estimates for the tag using all the
previous angle measurement. Thus after two
measurements the robot has one estimate for the tag
location and n measurements give 1+2+3+...+(n-1)
estimates.
Each estimate is fused with the previous estimate
of the tag location using a simple Kalman filter. It is
a recursive estimator, so all the prior information is
contained in the previous estimate (Maybeck, 1979).
The calculated variance P
k
represents the uncertainty
in the location of the tag. The equations for the
Kalman filter are shown below.
()
(
)
()
var+kP
kP
=kK
1
1
−
−
(6)
(
)
(
)
(
)()
[]
11 −−
⋅
−
kxEkK+kx=kx
(7)
(
)
(
)
(
)( )
11 −⋅
−
−
kPkKkP=kP
(8)
Odometry error and angle measurement error
may both cause significant deviation from the
correct position. Thus several estimates from
different robots are needed in order to properly
localize the tag.
4 RESULTS
Simulation models for the multi-robot localization
system were built in order to get an idea of the
effects of different measurement errors. The
simulations were run on Matlab. The system
presented here simulates a scenario where a single
tag is localized by a group of robots passing the tag
one by one. Each robot has random error on its own
position and heading angle estimate. Each bearing
angle measurement also contains a random error.
After each bearing angle measurement the robot
calculates new estimate of the location of the tag.
The result is then written on the tag's memory. A
robot is able to detect the tag inside a circular area
(r=50cm) in front of the tag. If the tag already
contains an estimate of its position, the robot tries
also to correct it's own position.
4.1 Effects of Inaccuracies
Several simulations were run with different
parameters in order to discover the effects of
inaccuracies in different estimates. First simulation
contained 500 independent groups of ten robots
passing the tag and localizing it cooperatively. The
Figure 2 shows the average and maximum error in
the estimated location of the tag as a function of the
error in the bearing angle measurement for two
different runs.
The curves A and C represent average and
maximum error when the robots' position error was
at most ±8 cm on each axis. The curves B and D
represent a run where robot's position error was
doubled to ±16 cm. The maximum heading angle
COOPERATIVE LOCALIZATION - Self-configuring Procedure of a Multi-robot Localization System with Passive RFID
Technology
101
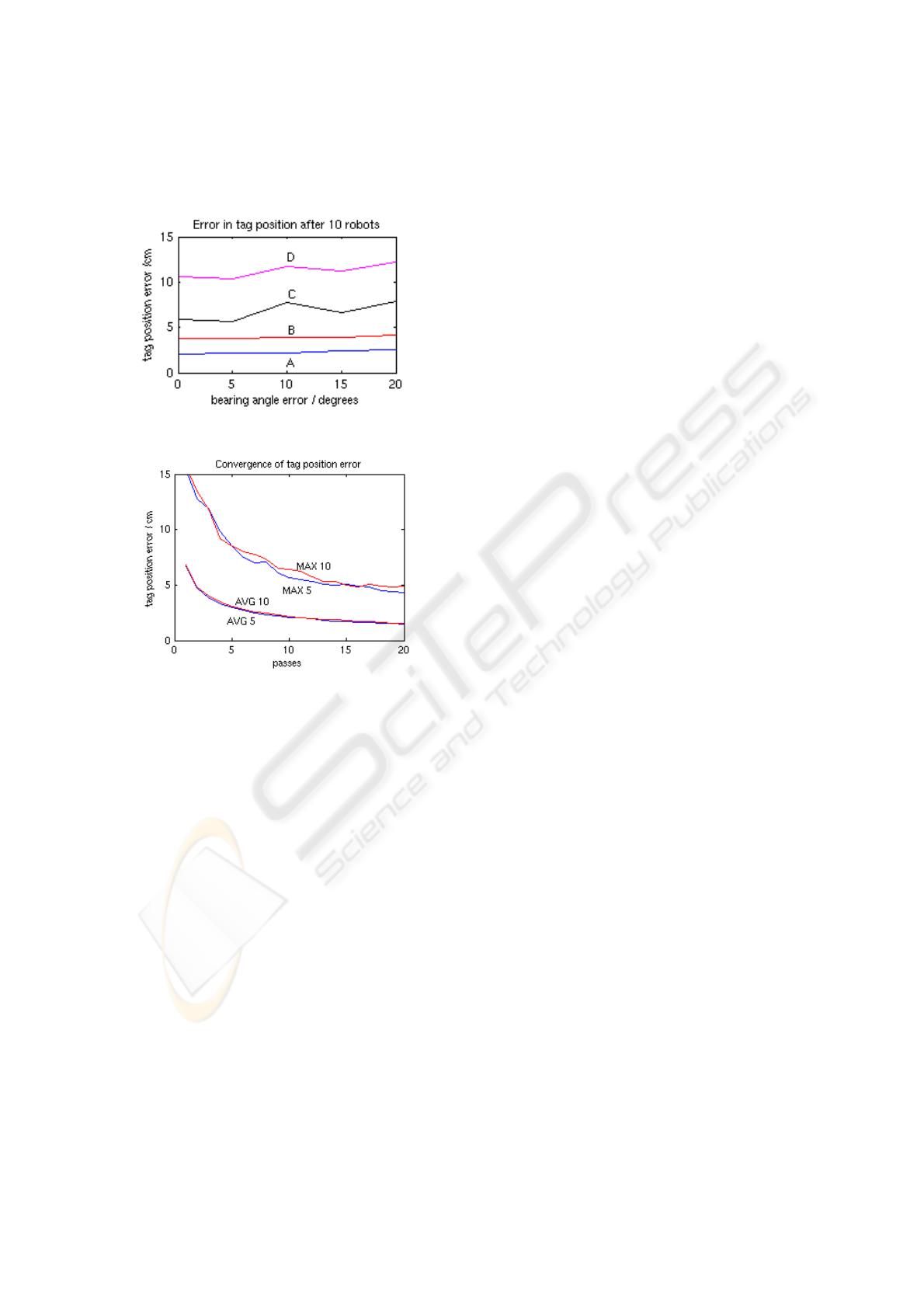
error was ±4° on both runs. The simulation results
show that the bearing angle error is a lot smaller
factor than the error in robot's position.
Figure 2: Effect of the bearing angle error.
Figure 3: Convergence of tag position estimate.
The Figure 3 shows the convergence of tag's
position estimate when 1000 independent groups of
20 robots pass a tag. Two runs with different bearing
angle error factors (5 and 10) were made. The curves
show average and maximum error in tag position
after each robot. The increase in bearing angle error
does not have significant effect on the position error.
Also a smaller group of robots can localize a tag
when they pass the tag multiple times.
5 CONCLUSIONS
The simulations indicate that the tags can be
localized with certain accuracy even if the angle
measurement to the tag is not very accurate. The
error in the tag’s position depends on several
different factors, such as errors in robot's position
and heading angle estimate. When several robots
participate in the localization the position error
settles on an acceptable level.
This study suggests that it is possible to build a
localization system that offers a bounded error after
it has been autonomously configured by simple,
inexpensive robots with readily available RFID
technology.
6 FUTURE WORK
Initial tests for the bearing angle measurements in
the office environment are under way. The first
RFID localization modules for laboratory tests will
be designed according to the information obtained
from the angle measurement tests. The system will
be tested with a group of small robots. In order to
obtain accurate localization information further
research is required in tag positioning and filtering
of the bearing angle measurements in an office
environment.
ACKNOWLEDGEMENTS
I want to thank CEA-LETI for offering the research
facilities during my visit in France and Finnish
Cultural Foundation for the funding.
REFERENCES
Bohn J., 2006. Prototypical Implementation of Location-
Aware Services based on Super-Distributed RFID
Tags., 19th International Conference on Architecture
of Computing Systems, LNCS No. 3894, Springer-
Verlag, pp. 69-83, Frankfurt am Main, Germany.
Hightower J., Borriello G. ,Want R., 2000. SpotON: An
Indoor 3D Location Sensing Technology Based on RF
Signal Strength, UWCSE Technical Report 2000.02.02
Hähnel D., Burgard W., Fox D., Fishkin K., Philipose M.,
2004. Mapping and Localization with RFID
Technology., Proc. IEEE Int. Conf. on Robotics and
Automation (ICRA), New Orleans, USA
Kleiner A., Prediger J., Nebel B., 2006. RFID
Technology-based Exploration and SLAM for Search
And Rescue, Proc. of International Conference on
Intelligent Robots and Systems, Beijing, China, 2006
Kulyukin V., Gharpure C., Nicholson J., Pavithran S.,
2004. RFID in Robot-Assisted Indoor Navigation for
the Visually Impaired, Proceedings of Intelligent
Robots and Systems,. Volume: 2, page(s): 1979- 1984
Maybeck, Peter S., 1979. Stochastic Models, Estimation
and Control, Vol.1 Academic Press, Inc., 1979
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
102
