
COMBINATION OF BREEDING SWARM OPTIMIZATION AND
BACKPROPAGATION ALGORITHM FOR TRAINING
RECURRENT FUZZY NEURAL NETWORK
Soheil Bahrampour
1
, Sahand Ghorbanpour
2
and Amin Ramezani
1
1
Control and Intelligent Processing Center of Excellence, School of ECE, University of Tehran, Iran
Douran Company, Tehran, Iran
Keywords: Recurrent fuzzy neural network, identification, breeding swarm optimization.
Abstract: The usage of recurrent fuzzy neural network has been increased recently. These networks can approximate
the behaviour of the dynamical systems because of their feedback structure. The Backpropagation of error
has usually been used for training this network. In this paper, a novel approach for learning the parameters
of RFNN is proposed using combination of the backpropagation and breeding particle swarm optimization.
A comparison of this approach with previous methods is also made to demonstrate the effectiveness of this
algorithm. Particle swarm is a derivative free, globally optimizing approach that makes the training of the
network easier. These can solve the problems of gradient based method, which are instability, local minima
and complexity of differentiating.
1 INTRODUCTION
Fuzzy neural network (FNN) was introduced to fuse
fuzzy systems and neural networks into an integrated
system to reap the benefits of both (
Ku, 1995). The
major drawback of the FNN is its limited application
domain to static problems, due to the feedforward
network structure, thus it is inefficient in dealing
with temporal applications.
Recurrent neural network systems learn and
memorize information implicitly with weights
embedded in them. A recurrent fuzzy neural network
(RFNN) was proposed based on supervised learning,
which is a dynamic mapping network and it is more
suitable for describing dynamic systems than the
FNN (Lee, 2000). Of particular interest is that it can
deal with time-varying input or output through its
own natural temporal operation (
Williams, 1989).
Ability of temporarily storing information simplifies
the network structure and fewer nodes are required
for system identification. Because of the complexity
in back propagation (BP) learning approach, only
diagonal fuzzy rules have been implemented (Ku,
1995). This limiting feature restricts users to employ
a more completed fuzzy rule base.
In this paper a novel approach is proposed as a
solution to this problem. We combined original BP
used in previous works (Lee, 2000) with a breeding
particle swarm optimization (BPSO) to train the
network more easily and without the complexity of
differentiating. The BPSO approach is an derivative-
free, global optimizing algorithm that is a
combination of genetic algorithm (GA) (
Surmann,
2001
) and particle swarm optimization (PSO)
(
Engelbrecht, 2002, Angeline 1994, and Kennedy, 1995)
which was first used for training RNN (
Settles, 2005).
This paper is organized as follows. In section 2,
the RFNN structure is introduced and a comparison
between the FNN and the RFNN is described.
Section 3 briefly introduces BPSO. The training
architecture of the network is presented in section 4
and simulation results are discussed in section 5.
Finally, in section 6 we summarize the result of this
approach.
2 NETWORK STRUCTURE
The key aspects of the RFNN are dynamic mapping
capability, temporal information storage, universal
approximation, and the fuzzy inference system. The
314
Bahrampour S., Ghorbanpour S. and Ramezani A. (2008).
COMBINATION OF BREEDING SWARM OPTIMIZATION AND BACKPROPAGATION ALGORITHM FOR TRAINING RECURRENT FUZZY NEURAL
NETWORK.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 314-317
DOI: 10.5220/0001491703140317
Copyright
c
SciTePress
RFNN possesses the same advantages as recurrent
neural networks and extend the application domain
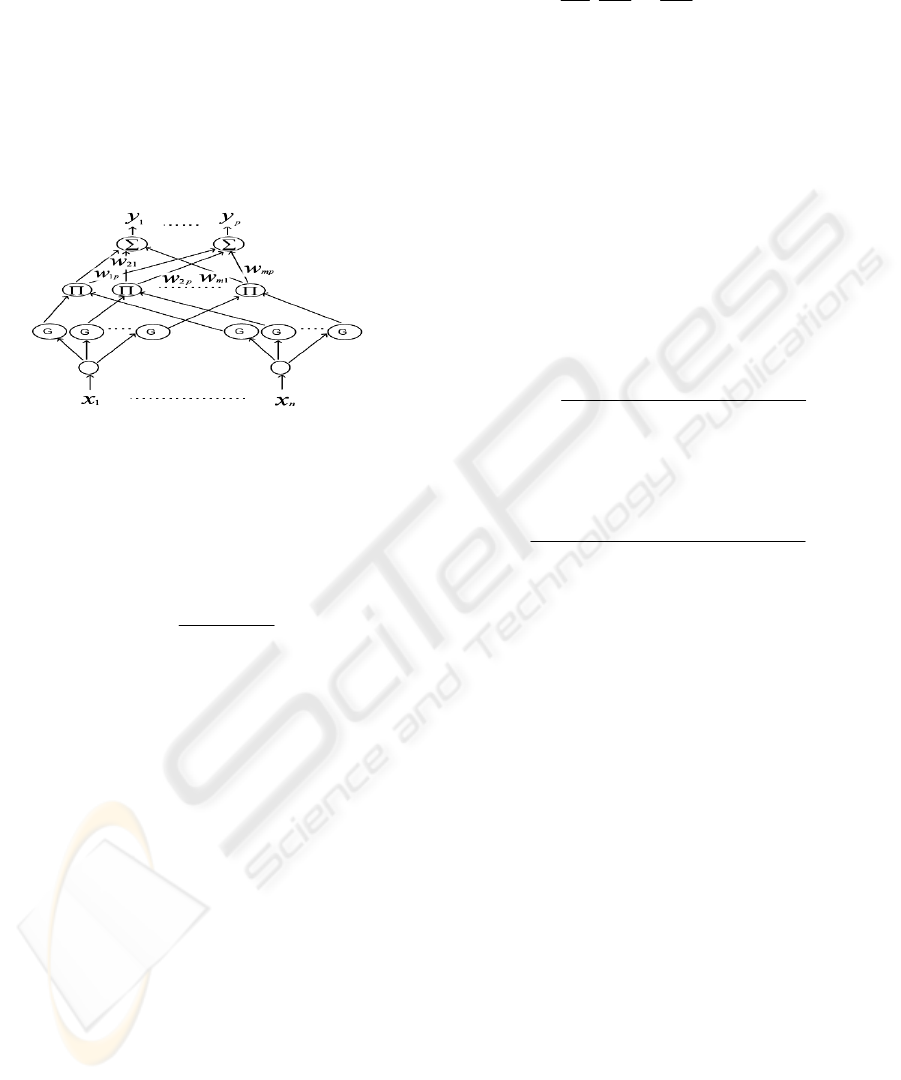
of the FNN to temporal problems. A schematic
diagram of the proposed RFNN structure is shown in
Fig. 1 which indicates the signal propagation and the
operation functions of the nodes in each layer. In the
following description,
k
i
u denotes i-th input of a
node in the k-th layer;
k
i
o
denotes the i-th node
output in the k-th layer. For the sake of brevity, a
brief description of the RFNN is introduced.
Interested readers are referred to reference (Lee,
2005).
Figure 1: structure of RFNN.
Layer 1: Input Layer:
11
ii
uo =
(1)
Layer 2: Membership Layer: The Gaussian function
is adopted here as a membership function:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
−
−=
2
2
2
2
)(
)(
exp
ij
ij
ij
ij
mu
o
σ
(2)
where
ij
m and
ij
σ
are the center (or mean) and the
width (or standard deviation—STD) of the Gaussian
membership function. The subscript ij indicates the
j-th term of the i-th input. In addition, the inputs of
this layer for discrete time k can be denoted by
)()()(
12
kokoku
f
ij
iij
+=
(3)
where
ijij
f
ij
koko
θ
×−= )1()(
2
and
ij
θ
denotes the link
weight of the feedback unit. It is clear that the input
of this layer contains the memory terms
)1(
2
−
ko
ij
,
which store the past information of the network.
Each node in this layer has three adjustable
parameters:
ij
m ,
ij
σ
, and
ij
θ
.
Layer 3: Rule Layer:
[][]
⎭
⎬
⎫
⎩
⎨
⎧
−−−
==
∏
)()(exp
22
33
i
i
i
T
i
i
i
i
ii
muDmuD
uo
(4)
Where
[][ ]
T
niiii
T
niiii
niii
i
mmmmuuuu
diagD
,...,,,,...,,
,
1
,...,
1
,
1
2121
21
==
⎭
⎬
⎫
⎩
⎨
⎧
=
σσσ
(5)
Layer 4: Output Layer:
∑
=
==
m
j
jpjpp
wuoy
1
444
(6)
where
3
4
jj
ou
=
and
4
ji
w
(the link weight) is the output
action strength of the i-th output associated with the
j-th rule.
4
ji
w are the tuning factors of this layer.
Finally, the overall representation of input x and the
p-th output is
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−×−+
−
×==
∏
∑
=
=
2
2
2
1
1
44
)(
))1()((
exp
)(
ij
ijij
ij
i
n
i
m
j
jp
p
p
mkokx
woky
σ
θ
(7)
Where
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−×−+−
−
=−
2
2
2
2
)(
))2()1((
exp
)1(
ij
ijij
ij
i
ij
mkokx
ko
σ
θ
(8)
Obviously, using the RFNN, the same inputs at
different times yield different outputs. The proposed
RFNN can be shown to be a universal uniform
approximator for continuous functions over compact
sets if it satisfies a certain condition (Lee, 2000).
3 BPSO
With correct combination of GA and PSO, the
hybrid can outperform, or perform as well as, both
the standard PSO and GA models (
Settles, 2005). The
hybrid algorithm combines the standard velocity and
position update rules of PSOs with the ideas of
selection, crossover and mutation from GAs. An
additional parameter, the breeding ratio (Ψ),
determines the proportion of the population which
undergoes breeding (selection, crossover and
mutation) in the current generation. Values for the
breeding ratio parameter range from (0.0:1.0).
In each generation, after the fitness values of all
the individuals in the same population are
calculated, the bottom (N · Ψ) are discarded and
removed from the population where N is the
population size. The remaining individual’s velocity
vectors are updated, acquiring new information from
COMBINATION OF BREEDING SWARM OPTIMIZATION AND BACKPROPAGATION ALGORITHM FOR
TRAINING RECURRENT FUZZY NEURAL NETWORK
315
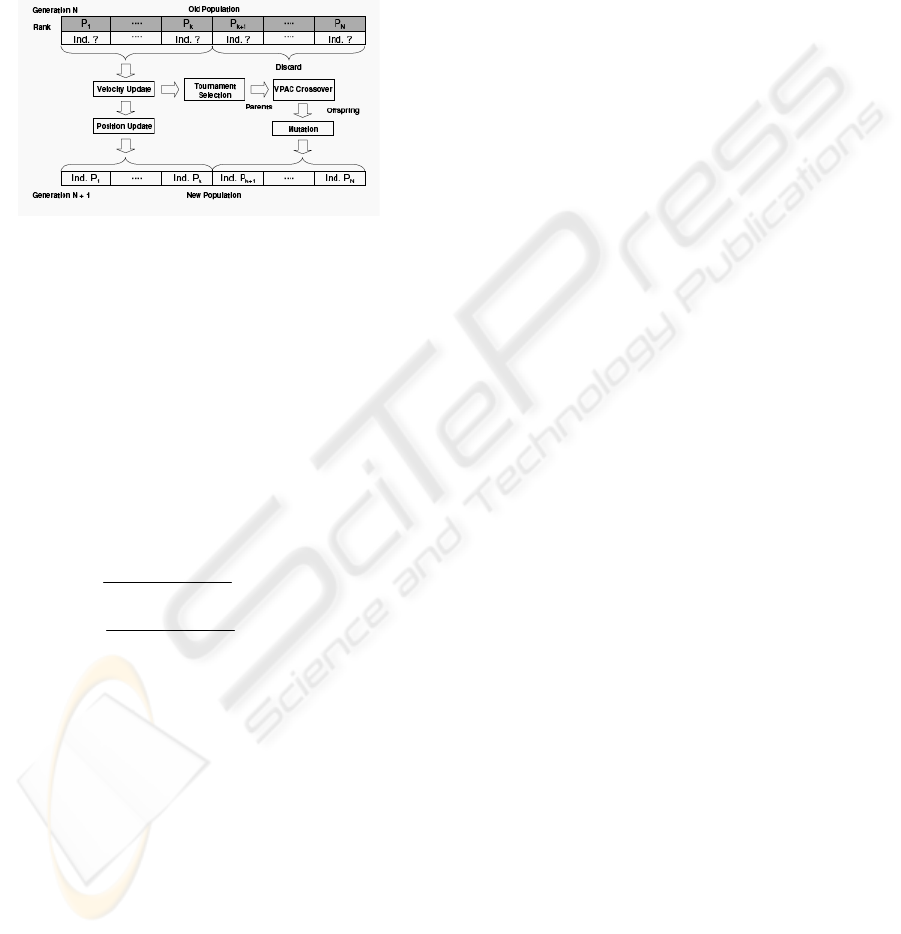
the population. The next generation is then created
by updating the position vectors of these individuals
to fill (N · (1 − Ψ)) individuals in the next
generation. The (N · Ψ) individuals needed to fill the
population are selected from the individuals whose
velocity is updated to undergo VPAC crossover and
mutation and the process is repeated. For clarity, the
flow of these operations is illustrated in Figure 1
where k = (N · (1 − Ψ)).
Figure 2: BPSO.
Here, we developed crossover operator to utilize
information available in the Breeding Swarm
algorithm, but not available in the standard GA
implementation. The new crossover operator,
velocity propelled averaged crossover (VPAC),
incorporates the PSO velocity vector. The goal is
creating two new child particles whose position is
between the parent’s positions, but accelerated away
from the parent’s current direction (negative
velocity) in order to increase diversity in the
population. Equations (8) show how the new child
position vectors are calculated using VPAC.
⎪
⎩
⎪
⎨
⎧
−
+
=
−
+
=
)(
0.2
)()(
)(
)(
0.2
)()(
)(
22
21
2
11
21
1
i
ii
i
i
ii
i
vp
xpxp
xc
vp
xpxp
xc
ϕ
ϕ
(9)
In these equations,
)(
1 i
xc
and
)(
2 i
xc
are the
positions of child 1 and 2 in dimension i,
respectively.
)(
1 i
xp
and
)(
2 i
xp
are the positions of
parents 1 and 2 in dimension i, respectively.
)(
1 i
vp
and
)(
2 i
vp
are the velocities of parents 1 and 2 in
dimension i, respectively.
ϕ
is a uniform random
variable in the range [0.0:1.0]. Towards the end of a
typical PSO run, the population tends to be highly
concentrated in a small portion of the search space,
effectively reducing the search space. With the
addition of the VPAC crossover operator, a portion
of the population is always pushed away from the
group, increasing the diversity of the population and
the effective search space.
The child particles retain their parents’s velocity
vector
),()(
11
vpvc
G
G
=
)()(
22
vpvc
G
G
=
. The previous
best vector is set to the new position vector,
restarting the child’s memory by replacing new
)()(),()(
2211
xppcxppc
G
G
G
G
=
=
. The velocity and
position update rules remain unchanged from the
standard inertial implementation of the PSO. The
social parameters are set to 2.0 while inertia is
linearly decreased from 0.7 to 0.4 and a maximum
velocity (Vmax) of ±1 was allowed. The breeding
ratio was set to an arbitrary 0.3. Tournament
selection, with a tournament size of 2, is used to
select individuals as parents for crossover. The used
mutation operator is Gaussian mutation, with mean
0.0 and variance reduced linearly in each generation
from 1.0 to 0.0. Each weight in the chromosome has
probability of mutation 0.1.
4 NETWORK TRAINING
BP approach, as mentioned, has been mostly used
for training RFNN in previous works. This approach
is not easy to implement, when faced with the case
of a complete or a non-diagonal fuzzy rule base. As
we can see in Fig. 1, each rule of layer 3 is made by
only a diagonal variables, i.e. the i-th rule are made
by multiplication of the i-th outputs of layer 2.
However, if we want to use complete or non-
diagonal fuzzy rule base, it will make learning of
parameters in layer 2 totally complicated. In this
paper we propose Breeding Particle Swarm
Optimization for tuning parameters of layer 2
(
ij
m
,
ij
σ
,
ij
θ
) and original BP for tuning
jp
w
. These
two approaches are used simultaneously. Pseudo
code of the algorithm used in this study for training
RFNN parameters is shown in Fig. 3. The proposed
combination has various benefits for training RFNN.
First of all, there is no need to differentiate those
complex derivations for training the parameters of
the 2
nd
layer. The proposed algorithm utilizes BPSO
as a derivative-free approach for training these
parameters. The method is also a global optimization
approach that prevents training parameters from
converging to local minima. Because of simplicity
and high speed convergence, the parameters of 4
th
layer is learned by BP. Note that using a complete
fuzzy rule base doesn’t affect the tuning of
jp
w
by
BP and will not increase its complexity.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
316
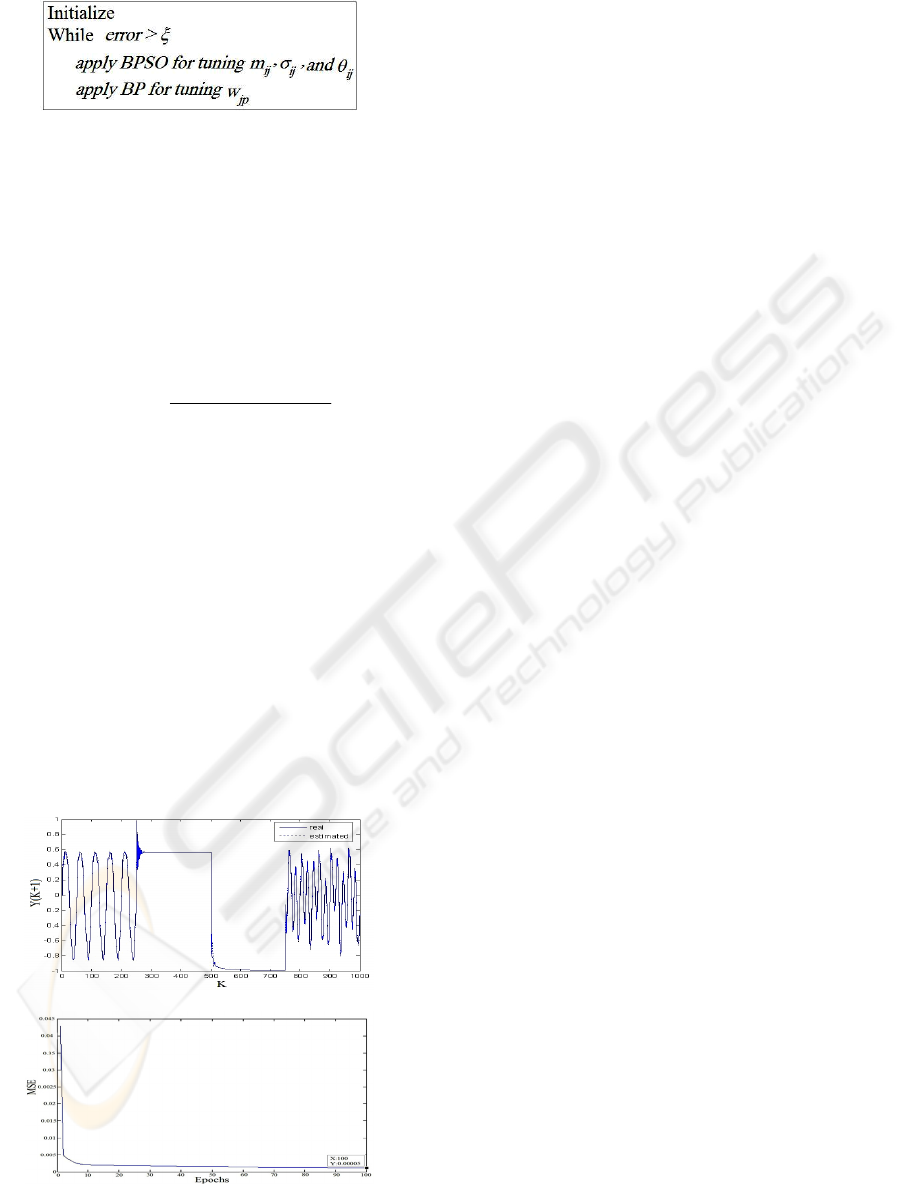
Figure 3: Pseudo code of the proposed tuning algorithm.
5 SIMULATION RESULTS
Suppose the following nonlinear dynamical system:
))1(),(),2(),1(),((
)1(
−−−
=+
kukukykykyf
ky
ppp
p
(10)
Where,
2
3
2
2
435321
54321
1
)1(
),,,,(
xx
xxxxxx
xxxxxf
++
+−
=
(11)
In this system the output value depended on the
previous values of the output and the previous
values of the input. We use RFNN to identify this
system. Because of dynamical characteristics of
RFNN, it is not necessary to use all complete
samples of the previous inputs and outputs. So just
y(k) and u(k) are used for estimating y(k+1). The
parameters of the 2nd layer of the RFNN is tuned by
BPSO and the output weights,
jp
w
is tuned with BP
simultaneous. The same input signal that was used in
(Lee, 2000) is used here for testing. Fig. 4 illustrates
that learning of the network is successfully done.
This method leads to better identification than the
previous ones. The MSE parameter was 0.00013 in
original method while our proposed method
converges to 0.00005.
a)
b)
Figure 4: training RFNN parameters with cooperation of
the BPSO and BP. a) Identification. b) MSE.
6 CONCLUSIONS
In this study a novel approach for training RFNN
was proposed. BP algorithm suffers from complexity
of differentiating and converging to local minima.
Our proposed method utilizes BPSO with
combination of BP. As the simulation results show,
applying this algorithm improves the performance of
training RFNN. This improvement is gained by
globally optimizing the feature of PSO that prevents
training to be entrapped in local minima. The
complexity of differentiating for gradient based
methods is more serious when a complete or a non-
diagonal fuzzy rule base is used. This algorithm
solves this problem too and one can use it more
frequently.
REFERENCES
Angeline, P., Saunders, G., Pollack, J.,1994. An
evolutionary algorithm that constructs recurrent neural
networks.
Engelbrecht, A. P., 2002. Computational Intelligence.
John Wiley and Sons,2002.
Kennedy, J., Eberhart, R., 1995. Particle Swarm
Optimization. IEEE International Conference on
Neural Networks , pp. 1942-1948.
Ku, C. C., Lee, K. Y., 1995. Diagonal recurrent neural
networks for dynamic systems control. IEEE Trans.
Neural Networks, vol. 6, pp. 144–156.
Lee, C. H., Teng, C., 2000. Identification and Control of
Dynamic Systems Using Recurrent Fuzzy Neural
Networks. In IEEE Transactions on fuzzy systems,
vol.8, NO. 4, 349,366 .
Settles, M., Nathan, P., Soule, T, 2005. Breeding Swarms:
A New Approach to Recurrent Neural Network
Training. GECCO’05, June 25–29 Washington, DC,
USA.
Soule, T., Chen, Y., Wells, R.,2002. . Evolving a strongly
recurrent neural network to simulate biological eurons.
In the proceedings of The 28th Annual Conference of
the IEEE Industrial Electronics Society.
Surmann, H., Maniadakis, M., 2001. Learning feed-
forward and recurrent fuzzy systems: A genetic
approach. Journal of System Architecture 47, 649-662.
Williams, R. J., Zipser, D.,1989. A learning algorithm for
continually running fully recurrent neural networks.
Neural Computation., vol. 1, pp. 270–280.
COMBINATION OF BREEDING SWARM OPTIMIZATION AND BACKPROPAGATION ALGORITHM FOR
TRAINING RECURRENT FUZZY NEURAL NETWORK
317
