
DRIVER’S DROWSINESS DETECTION BASED ON
VISUAL INFORMATION
Marco Javier Flores, José María Armingol and Arturo de la Escalera
Intelligent System Laboratory, Universidad Carlos III de Madrid, Leganés 28911, Madrid, Spain
Keywords: Drowsiness, driver assistance system, object detection, support vector machine, intelligent transportation
technology.
Abstract: In this paper, a new Driver Assistance System (DAS) for automatic driver’s drowsiness detection based on
visual information and image processing is presented. This algorithm works on several stages using Viola
and Jones (VJ) object detector, expectation maximization algorithm, the Condensation algorithm and
support vector machine to compute a drowsiness index. The goal of the system is to help in the reduction of
traffic accidents caused by human errors. Examples of different driver’s images taken over a real vehicle are
shown to validate the algorithm.
1 INTRODUCTION
Active Security, whose objective is to endow
vehicles with intelligent systems that predicts and
avoids accidents, has acquired a growing interest
and it has become one of the most important
research fields in the transport security. Indeed, DAS
objective is to contribute in traffic accident reduction
by using new technologies; this is, increasing the
vehicles security, and at the same time, decreasing
the danger situations that may be generated during
driving process.
Current research is interested in the study of driver's
state behavior; in this ambitious research, it has
taken relevance the driver's drowsiness study, also
denominated fatigue and related closely with
distraction. Drowsiness is presented in stress and
fatigue situations in an unexpected and inopportune
way. The dream sensation generates the decrease
vigilance level state, and this factor produces danger
situations and increases the probability of causing
some accident. Drowsiness may also be produced by
dream's illnesses, certain type of medications, and
even, bored situations, such as driving for a long
time. It has been estimated that drowsiness produces
among 10% and 20% of traffic accidents with dead
drivers (Tian and Qin, 2005) and hurt drivers (Dong
and Wu, 2005). Whereas trucking industry produces
57% of fatal truck accidents for this fatality (Ji and
Yang, 2002; Bergasa et al., 2004). Fletcher (Fletcher
et al., 2003) goes further on and has mentioned that
30% of total traffic accidents have been produced by
drowsiness. For these reasons, it is important to
design systems that allow monitoring the drivers and
measuring their level of attention during whole
driving process. Fortunately, people in drowsiness
produce several typical visual cues that are detected
on the human face: yawn frequency, eye-blinking
frequency, eye-gaze movement, head movement and
facial expressions. Taking advantage of these visual
characteristics; computer vision is the feasible and
appropriate technology to treat this problem.
The organization of the paper is as follows. Section
2 presents an extended state of the art. Section 3
introduces the proposed method for face location
and eye detection in detail. Finally, in section 4
results and conclusions are shown.
2 PREVIOUS WORK
Ji and Yang (2002) has presented a detection
drowsiness system based on infrared light
illumination and stereo vision. This system localizes
the eye position using image differences based on
the bright pupil effect. Afterwards, this system
computes the blind eyelid frequency and eye gaze to
build two drowsiness indices: PERCLOS and AECS.
Bergasa and his colleagues (Bergasa et al., 2004) has
developed a non-intrusive system that also uses
infrared light illumination, this system computes
driver vigilance level using a finite state automata
30
Javier Flores M., María Armingol J. and de la Escalera A. (2008).
DRIVER’S DROWSINESS DETECTION BASED ON VISUAL INFORMATION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 30-35
DOI: 10.5220/0001479400300035
Copyright
c
SciTePress
with six eye states that computes several indices,
among them, PERCLOS; on the other hand, the
system is able to detect inattention through face
pose. Horng et al. (2004) has shown a system that
uses a skin color model over HSI space for face
detection, edge information for eye localization and
dynamical template matching for eye tracking.
Using color information of eyeballs, it identifies the
eye state and computes the driver’s state. Brandt et
al. (2004) has shown a system that monitors the
driver fatigue and inattention. For this task, he has
used VJ method to detect the driver’s face. Using the
optical flow algorithm over eyes and head this
system is able to compute the driver state. Tian and
Qin (2005) have built a system for verifying the
driver’s eye state. Their system uses Cb and Cr
components of the YCbCr color space; with vertical
projection function this system localizes the face
region and with horizontal projection function it
localizes the eye region. Once the eyes are localized
the system computes eye state using a complexity
function. Dong and Wu (2005) have presented a
system for driver fatigue detection, which uses a
skin color model based on bivariate Normal
distribution and Cb and Cr components of the
YCbCr color space. After localizing the eyes, it
computes the fatigue index utilizing the eyelid
distance to classify between open eyes and closed
eyes.
3 PROPOSED SYSTEM
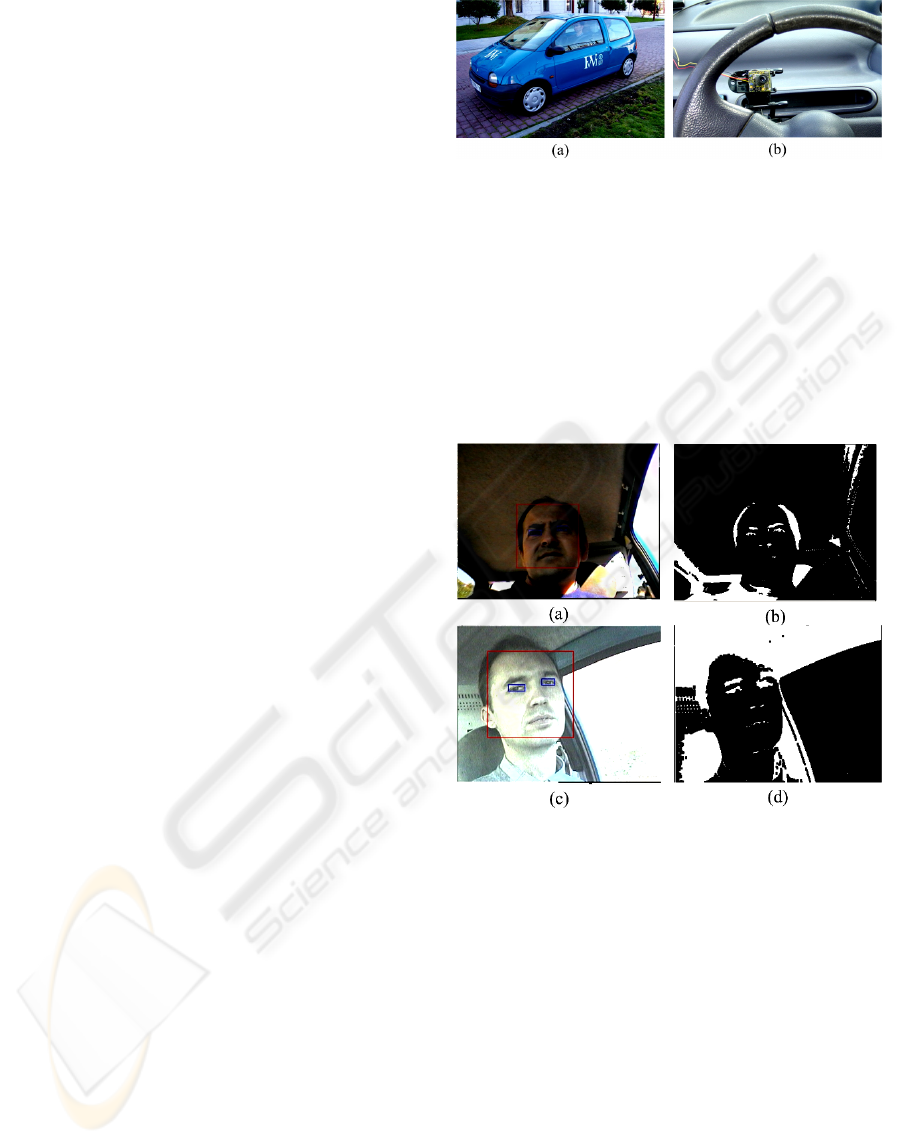
In this paper, a system to detect the driver’s
drowsiness is presented; it works on grayscale
images taken with the camera inside the IvvI
(Intelligent Vehicle based on Visual Information)
vehicle,
Figure 1 (b). IvvI is an experimental
platform used to develop driver assistance systems
in real driver conditions. IvvI is a Renault Twingo
vehicle,
Figure 1 (a), equipped with a processing
system which processes the information comes from
the cameras. This system consists of several parts
that will be described throughout this section.
3.1 Face Detection
To localize the face, this system uses VJ object
detector which is a machine learning approach for
visual object detection. It uses three important
aspects to make an efficient object detector based on
the integral image, AdaBoost technique and cascade
classifier (Viola and Jones, 2001). Each one of these
elements is important to process the images efficiently
Figure 1: (a) IvvI vehicle, (b) Driver’s camera.
and near real-time with 90% of correct detection. A
further important aspect of this method is its
robustness under changing light conditions.
However, in spite of the above-mentioned, its
principal disadvantage is that it can not extrapolate
and does not work appropriately when the face is not
in front of the camera axis. Such would be the case
when the driver moves his/her head; however, this
shortcoming will be analyzed later on.
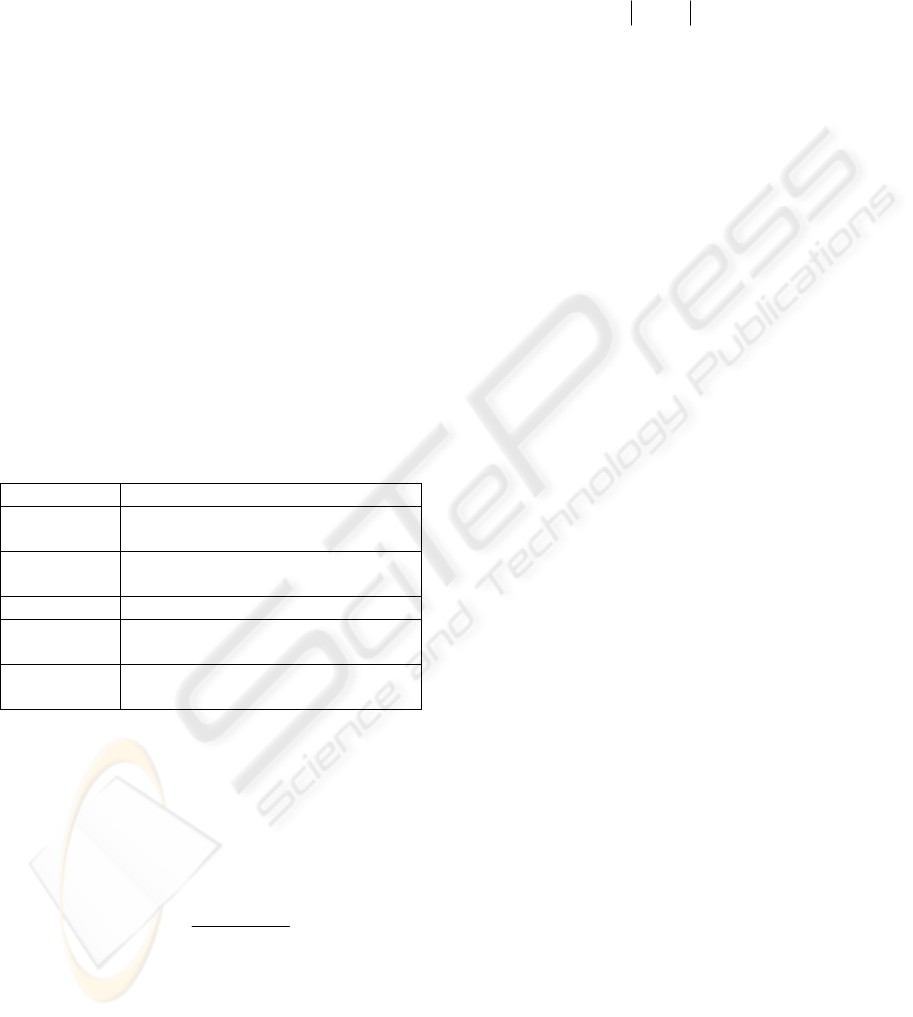
Figure 2: Face and eye detection on different drivers.
Continuing with the algorithm description, when
driver’s face is detected, it is enclosed with a
rectangle R which is addresses by left-top corner
coordinates
),(
000
yxP
=
and right-bottom corner
coordinates
),(
111
yxP
=
, as can be observed in
Figure 2 (a), (c). Indeed, rectangle size comes from
experimental analysis developed on the face
database that has been created for this task.
3.2 Face Tracking
The principal problem of VJ method is that it is only
able to localize the human face when it is in frontal
position at camera. This drawback induces to have
an unreliable system to driver’s analysis during all
driving process. Much effort has been put to correct
DRIVER’S DROWSINESS DETECTION BASED ON VISUAL INFORMATION
31
this problem; so, using a dual active contour (Gun
and Nixon, 1994; Dokladal et al., 2004) is able to
solve this disadvantage and to track the face in the
driving process appropriately.
This face tracker needs to be initialized to extract an
approximation of the head boundary. This is done
once the face has been located through the rectangle
R of the previous section, the system automatically
generates an internal and external ring around the
face based on gradient information, continuing with
the calculation of the energy of the two active
contours, after that, it corrects the position that
corresponds to the face contour model.
3.3 Eye Detection
Once the face has been located through the rectangle
R in previous section, using the face anthropometric
properties (Gejgus and Sparka, 2003) which come
from face database analysis, two rectangles
containing the eyes are obtained. Preliminary, we
use R
L
for left eye rectangle and R
R
for right eye
rectangle. The rectangles coordinates are presented
in Table 1 and
Figure 3 (a) shows some examples.
Table 1: Preliminary rectangles that contain the eyes.
Left eye
Left top
corner
)4/,6/(),(
0000
hywxvu
LL
++=
Right bottom
corner
)2/,2/(),(
0011
hywxvu
LL
+
+
=
Right eye
Left top
corner
)4/,2/(),(
0000
hywxvu
RR
+
+=
Right bottom
corner
)2/,6/(),(
1111
hywxvu
RR
−−=
where
01
xxw −= and
01
yyh −
=
.
After the previous step; the exact position of each
eye will be localized, incorporating information
from grey-level pixels through the following
algorithm:
• Generate the image
J by means of the following
equation:
σ
myxI
yxJ
−
=
),(
),(
(1)
where m and
σ
are the mean and the standard
deviation, respectively. They are computed over
the eye rectangles described in Table 1, and
),( yxI is the pixel value in the position ),( yx .
• Generate the image
K
using the equation:
⎩
⎨
⎧
<+
≥−
=
0),(),(256
0),(256),(
),(
2
1
yxJifyxJ
yxJifyxJ
yxK
δ
δ
(2)
where
)1)256/),((,0max(
1
−
=
yxJceil
δ
,
))256/),((,1max(
2
yxJceil=
δ
and )(xceil is
the function that returns the smallest integer
larger than
x
.
• Obtain the binary image ,
B , from image
K
through the equation (3), namely,
⎩
⎨
⎧
≥
=
caseother
yxKif
yxB
0
),(255
),(
κ
(3)
where
κ
is computed by Ostu’s method (Otsu,
1979), Figure 3 (b).
• Compute the gradient image, G, using the Sobel
horizontal and vertical edge operator followed by
an image contrast enhancement (Jafar and Ying,
2007), Figure 3 (d).
• Compute the logarithm image, L, with the
objective to enhance the iris pixels that are the
central part of the eye (Wu et al., 2004), Figure 3
(e).
All previous information produces a random sample
that comes from a distribution function that it has an
elliptic shape; i.e., the pixels coming from each eye
through the images B, G and L can be viewed as a
realization of a random variable. Having specified
all the data describing the model, to obtain the
parameters of this function the expectation
maximization algorithm (EM) has been used.
Special attention has received the ellipse center,
because, it allows to obtain the exact position of the
eye center. The ellipse axes determine the width and
height of the eyes. The result is shown in Figure 3
(c), (f), while in Figure 2 (b), (d) the eye position
generated for this procedure is depicted. The
expectation maximization algorithm computes the
mean, variance and the correlation of X and Y
coordinates that belong to the eye. The initial
parameters to run EM are obtained from a regression
model adjusted with the last square method. These
parameters will be used in the eye state analysis
below.
3.4 Eye Tracking
There are a number of reasons for tracking. One is
the VJ’s problems mentioned above. Another is the
necessity to track the eyes continuously from frame
to frame. A third reason is to satisfy the real-time
conditions reducing the eye search space. For this
task; the Condensation algorithm that was proposed
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
32

Figure 3: Eye location through R
L
and R
R
and Expectation Maximization algorithm over a spatial distribution of the eye
pixels: (a) grayscale image, (b) binary image B, (d) gradient image G, (e) logarithm image L, (c) right eye image, and (f)
ellipse parameters: center position, axes and inclination angle.
by Isard and Blake (1998) for tracking active
contours using a stochastic approach has been used.
The Condensation algorithm combines factored
sampling with a dynamical model that is governed
through the state equation:
),(
11 −−
=
ttt
XfX
ξ
(4)
where
t
X is the state at instant
t
, )(
⋅
f is an
nonlinear equation and depends on a previous state
plus a white noise. The goal is to estimate the state
vector
t
X with the help of systems observation
which are realization of the stochastic process
t
Z
governed by the measurement equation:
),(
ttt
XhZ
η
=
(5)
where
t
Z is the measure system at time
t
, )(
⋅
h is
another nonlinear equation that links the present
state plus a white noise. The processes
t
ξ
and
t
η
are
each one white noise and independent among them.
It must be pointed out that
t
X is an unobservable
underlying stochastic process, for this problem, it is
eye position over the image and its velocity:
T
t
yxyxX ),,,(
••
=
(6)
The Condensation is initialized when the eyes are
localized with the method of previously explained.
Table 1 shows the eye tracking results that has been
developed in two sequences of images.
3.5 Eye State Detection
To identify drowsiness through eye analysis is
necessary to know its state (open or closed) and
develop an analysis over the time. The classification
among the open and closed state is complex due to
the changing shape of the eye, among other factors,
changing position and face rotating, twinkling and
illumination variations. All this makes difficult to
use only color cues to analyze eye in a reliable
manner. For the problems that have been exposed a
supervised classification method has been used for
this challenging task, in this case, support vector
machine (SVM) classification (Cristianini and
Shawe-Taylor, 2000; Chang and Lin, 2001) which is
rooted in statistical learning theory. SVM uses a
training set,
{
}
miyxS
ii
,,1:),( "=
=
, where
i
x
is
the characteristic vector in
n
R , }2,1{∈
i
y represents
the class, in this case 1 for open eyes and 2 for
closed eyes, and m is the number of elements of
S .
To do this work a training set has been built that
consists of images of open eyes and images of
closed eyes. The images come from diverse sources,
under several illumination conditions and different
races. A further important aspect of this eye database
is that contains images of different eye colors, i.e.,
blue, black, green. Previous to SVM training, it is
indispensable to process each image that consists on
histogram equalization, filter with the median filter,
followed by the sharpen filter and to normalize in
the
]1,0[ interval. The median filter is used to reduce
the image noise, whereas the sharpen filter is used to
enhance the borders. The main objective of training
SVM is to find the best parameters and the best
kernel that minimizes the optimization problem
(Chang and Lin, 2001), so, after several training
experiments of the SVM algorithm, it has decided to
use the RBF kernel, i.e.,
),(
ji
xxK
is
)exp(
2
ji
xx −−
γ
, 35
=
C and
0128.0=
γ
; these
parameters reach high training classification rate that
is about 94%.
DRIVER’S DROWSINESS DETECTION BASED ON VISUAL INFORMATION
33

Table 2: Result of eye tracking and eye state analysis.
Eye tracking Eye state analysis
Total
frames
Tracking failure Correct rate
(%)
Eyes Open Eyes Closed Correct rate
(%)
Video1 960 20 97.91 690/700 258/260 98.90
Video2 900 30 96.60 520/560 339/340 96.27
Figure 4: Different stage of the proposed algorithm on several instants of time and driving conditions.
3.6 Drowsiness Index
The eye-blinking frequency is an indicator that
allows to measure driver’s drowsiness (fatigue)
level. As in the works of Horng et. al. (2004) and
Dong and Wu (2005), if five consecutive frames or
during 0.25 seconds are identified as eye-closed the
system is able to issue an alarm cue. Table 2 also
presents the result of eye state analysis over two
sequences of images.
4 CONCLUSIONS
A non-intrusive driver’s drowsiness system based on
computer vision has been presented in this paper.
This system uses visual information to analyze and
to monitor driver’s eye state at near real-time and
real-driving conditions, i.e., external illuminations
interference, vibrations, changing background and
facial orientations changing. Experiments were
carried out in the IvvI vehicle with different drivers.
This guarantees and confirms that these experiments
have proven robustness and efficiency in real traffic
scenes. Another drowsiness indexes will be
implemented as future works and they will be
compared. Figure 4 shows an example that validates
this system.
REFERENCES
Viola P. and Jones M., 2001: Rapid Object Detection
using a Boosted Cascade of Simple Features. Accepted
Conference on Computer Vision and Pattern
Recognition.
Horng W., Chen C. and Chang Y., 2004: Driver Fatigue
Detection Based on Eye Tracking and Dynamic
Template Matching. Proceedings of the IEEE
International Conference on Networking, Sensing &
Control.
Tian Z. and Qin. H., 2005: Real-time Driver’s Eye State
Detection. IEEE International Conference on
Vehicular Electronics and Safety, Pg. 285-289.
Ji Q. and Yang. X., 2002: Real-Time Eye, Gaze, and Face
Pose Tracking for Monitoring Driver Vigilance. Real
Time Imaging, Nr. 8, Pg. 357-377, Elsevier Science Ltd.
Bergasa L., Nuevo J., Sotelo M. and Vazquez M., 2004:
Real Time System for Monitoring Driver Vigilance.
IEEE Intelligent Vehicles Symposium.
Isard M. and Blake A., 1998: Condensation: conditional
density propagation for visual tracking. International
Journal on Computer Vision, 29(1), pp. 5-28.
Cristianini N. and Shawe-Taylor J., 2000: An introduction
to Support Vector Machines and other kernel-based
learning methods. Cambridge University Press.
Chang C. and Lin C., 2001: LIBSVM: a library for
support vector machine, URL: www.csie.ntu.edu.tw
/~cjlin/libsvm
Otsu N., 1979: A threshold selection method from gray-
level histograms. IEEE Trans. Systems, Man and
Cybernetics, Vol. 9, pp. 62-66.
Gejgus P. and Sparka M., 2003: Face Tracking in Color
Video Sequences. The Association for Computing
Machinery Inc.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
34

Brandt T., Stemmer R., Mertsching B., and Rakotomirainy
A., 2004: Affordable Visual Driver Monitoring
System for Fatigue and Monotony. IEEE International
Conference on Systems, Man and Cybernetics. Vol. 7,
pp. 6451-6456.
Fletcher L., Petersson L. and Zelinsky A., 2003: Driver
Assistance Systems based on Vision In and Out of
Vehicles. IEEE Proceedings of Intelligent Vehicles
Symposium, pp. 322-327.
Wu Y., Liu H. and Zha H., 2004: A New Method of
Detecting Human Eyelids Based on Deformable
Templates. IEEE International Conference on
Systems, Man and Cybernetics, pp. 604-609.
Jafar I., Ying H., 2007: A new method for Image Contrast
Enhancement Based on Automatic Specification of
Local Histograms. IJCSNS International Journal of
Computer Science and Network Security, Vol.7 No.7, July.
Dong W. Wu X., 2005: Driver Fatigue Detection Based on
the Distance of Eyelid. IEEE Int. Workshop VLSI
Design & Video Tech. Suzhou-China.
Gunn S. R. and Nixon M. S., 1994: A Dual Active
Contour for Head Boundary Extraction. IEEE
Colloquium on Image Processing for Biometric
Measurement, pp. 6/1 - 6/4, London.
Dokladal P., Enficiaud R. and Dejnozkova E., 2004:
Contour-Based Object Tracking with Gradient-Based
Contour Attraction Field. IEEE International
Conference on Acoustics, Speech and Signal
Processing (ICASSP’04), vol. 3, pp. iii-17-20.
DRIVER’S DROWSINESS DETECTION BASED ON VISUAL INFORMATION
35
