
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS
FOR MOBILE-ROBOT NAVIGATION
Amanda M. Whitbrook, Uwe Aickelin and Jonathan M. Garibaldi
ASAP Research Group, School of Computer Science, University of Nottingham, Jubilee Campus
Wollaton Road, Nottingham, NG8 1BB, U.K.
Keywords: Mobile-robot navigation, genetic algorithm, artificial immune system, idiotypic network.
Abstract: Robot-control designers have begun to exploit the properties of the human immune system in order to
produce dynamic systems that can adapt to complex, varying, real-world tasks. Jerne’s idiotypic-network
theory has proved the most popular artificial-immune-system (AIS) method for incorporation into
behaviour-based robotics, since idiotypic selection produces highly adaptive responses. However, previous
efforts have mostly focused on evolving the network connections and have often worked with a single, pre-
engineered set of behaviours, limiting variability. This paper describes a method for encoding behaviours as
a variable set of attributes, and shows that when the encoding is used with a genetic algorithm (GA),
multiple sets of diverse behaviours can develop naturally and rapidly, providing much greater scope for
flexible behaviour-selection. The algorithm is tested extensively with a simulated e-puck robot that
navigates around a maze by tracking colour. Results show that highly successful behaviour sets can be
generated within about 25 minutes, and that much greater diversity can be obtained when multiple
autonomous populations are used, rather than a single one.
1 INTRODUCTION
Short-term learning can be defined as the training
that takes place over the lifetime of an individual,
and long-term learning as that which evolves and
develops as a species interacts with its environment
and reproduces itself. The vertebrate immune system
draws on both types since, at birth, an individual
possesses a pool of antibodies that has evolved over
the lifetime of the species; the repertoire also adapts
and changes over the lifetime of the individual as the
living body responds to invading antigens. Recently,
researchers have been inspired by the learning and
adaptive properties of the immune system when
attempting to design effective robot-navigation
systems. Many artificial-immune-system (AIS)
methodologies adopt the analogy of antibodies as
robot behaviours and antigens as environmental
stimuli. Farmer’s computational model (Farmer et
al., 1986) of Jerne’s idiotypic-network theory (Jerne,
1974), which assumes this relation, has proved an
extremely popular choice, since the antibody
(behaviour) that best matches the invading antigen
(current environment) is not necessarily selected for
execution, producing a flexible and dynamic system.
The idiotypic architecture has produced some
encouraging results, but has generally suffered from
the same problems as previous approaches, as most
designs have used small numbers of pre-engineered
behaviours, limiting the self-discovery and learning
properties of the schemes. This research aims to
solve the problem by encoding behaviours as a set of
variable attributes and using a genetic-algorithm
(GA) to obtain diverse sets of antibodies for seeding
the AIS. Here, the first phase of the design is
described, i.e. the long-term phase that seeks to
produce the initial pool of antibodies.
The long-term phase is carried out entirely in
simulation so that it can execute as rapidly as
possible by accelerating the simulations to
maximum capacity. The population size is varied
and, in addition, two different population models are
considered, since it is imperative that an idiotypic
system is able to select from a number of very
diverse behaviours. In the first scheme there is only
one population, but in the second, separate
populations evolve in series but never interbreed. In
each case the derived antibody-sets are scored in
terms of diversity, solution quality, and how quickly
they evolve.
5
M. Whitbrook A., Aickelin U. and M. Garibaldi J. (2008).
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS FOR MOBILE-ROBOT NAVIGATION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 5-14
DOI: 10.5220/0001478700050014
Copyright
c
SciTePress

The paper is arranged as follows. Section 2
shows how the vertebrate immune system depends
on both short-term and long-term learning, and
discusses how AIS has been used as a model for
robotic controllers. It also highlights some of the
problems with previous approaches to AIS robot-
control and with evolutionary robotics in general.
Section 3 describes the test environments and the
problem used, and section 4 focuses on the
architecture of the long-term phase including details
of the GA. The experimental procedures are outlined
in Section 5 and the results are presented and
discussed in Section 6. Section 7 concludes the
paper.
2 BACKGROUND AND
MOTIVATION
Throughout the lifetime of an individual, the
adaptive immune system learns to recognise
antigens by building up high concentrations of
antibodies that have proved useful in the past, and
by eliminating those deemed redundant. This is a
form of short-term learning. However, the antibody
repertoire is not random at birth and the mechanism
by which antibodies are replaced is not a random
process. Antibodies are built from gene libraries that
have evolved over the lifetime of the species. This
demonstrates that the immune system depends on
both short-term and long-term learning in order to
achieve its goals.
When using the immune system as inspiration
for robot controllers, many researchers opt to
implement an idiotypic network based on Farmer’s
model of continuous antibody-concentration change.
In this model the concentrations are not only
dependent on the antigens, but also on the other
antibodies present in the system, i.e. antibodies are
suppressed and stimulated by each other as well as
being stimulated by antigens. In theory this design
permits great variability of robot behaviour since the
antibodies model the different behaviours, and the
complex dynamics of stimulation and suppression
ensure that alternative antibodies are tried when the
need arises (Whitbrook et al., 2007). However, past
work in this area has mostly focused on how the
antibodies in the network should be connected and,
for simplicity, has used a single set of pre-
engineered behaviours for the antibodies, which
limits the potential of the method. For example,
Watanabe et al. (1998a, 1998b) use an idiotypic
network to control a garbage-collecting robot,
utilizing GAs to evolve their initial set of antibodies.
The antibodies are composed of a precondition, a
behaviour, and an idiotope part that defines antibody
connection. However, the sets of possible
behaviours and preconditions are fixed; the GA
works simply by mixing and evolving different
combinations with various parameters for the
idiotope. Michelan and Von Zuben (2002) and
Vargas et al. (2003) also use GAs to evolve the
antibodies, but again only the idiotypic-network
connections are derived. Krautmacher and Dilger
(2004) apply the idiotypic method to robot
navigation, but their emphasis is on the use of a
variable set of antigens; they do not change or
develop the initial set of handcrafted antibodies, as
only the network links are evolved. Luh and Liu
(2004) address target-finding using an idiotypic
system, modelling their antibodies as steering
directions. However, although many behaviours are
technically possible since any angle can be selected,
the method is limited because a behaviour is defined
only as a steering angle and there is no scope for the
development of more complex functions. Hart et al.
(2003) update their network links dynamically using
reinforcement learning, but use a skill hierarchy so
that more complex tasks are achieved by building on
basic ones, which are hand-designed at the start.
It is clear that the idiotypic AIS methodology
holds great promise for providing a system that can
adapt to change, but its potential has never been
fully explored because of the limits imposed on the
fundamental behaviour-set. This research aims to
widen the scope of the idiotypic network by
providing a technique that rapidly evolves simple,
distinct behaviours in simulation. The behaviours
can then be passed to a real robot as a form of
intelligent initialization, i.e. a starting set of
behaviours would be available for each known
antigen, from which the idiotypic selection-
mechanism could pick.
In addition, long-term learning in simulation
coupled with an idiotypic AIS in the real world
represents a novel combination for robot-control
systems, and provides distinct advantages, not only
for AIS initialization, but also for evolutionary
robotics. In the past, much evolutionary work has
been carried out serially on physical robots, which
requires a long time for convergence and puts the
robot and its environment at risk of damage. For
example, Floreano and Mondada (1996) adopt this
approach and report a convergence time of ten days.
More recent evolutionary experiments with physical
robots, for example Marocca and Floreano (2002),
Hornby et al. (2000), and Zykov at al. (2004) have
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
6

produced reliable and robust systems, but have not
overcome the problems of potential damage and
slow, impractical convergence times. Evolving in
parallel with a number of robots, (for example
Watson et al. 1999) reduces the time required, but
can still be extremely prohibitive in terms of time
and logistics. Simulated robots provide a definite
advantage in terms of speed of convergence, but the
trade-off is the huge difference between the
simulated and real domains (Brooks, 1992).
Systems that employ an evolutionary training
period (long-term leaning phase) and some form of
lifelong adaptation (short-term learning phase) have
been used to try to address the problem of domain
differences, for example by Nehmzow (2002).
However, the long-term learning phase in
Nehmzow’s work uses physical robots evolved in
parallel, which means that the method is slow and
restricted to multi-agent tasks. Floreano and Urzelai
(2000) evolve an adaptable neural controller that
transfers to different environments and platforms,
but use a single physical robot for the long-term
phase. Keymeulen et al. (1998) run their long-term
and short-term learning phases simultaneously, as
the physical robot maps its environment at the same
time as carrying out its goal-seeking task, thus
creating the simulated world. They report the rapid
evolution of adaptable and fit controllers, but these
results apply only to simple, structured environments
where the robot can always detect the coloured
target, and the obstacles are few. For example, they
observe the development of obstacle avoidance in
five minutes, but this applies to an environment with
only one obstacle, and the results imply that the real
robot was unable to avoid the obstacle prior to this.
Furthermore, only eight different types of motion are
possible in their system. Walker et al. (2006) use a
GA in the simulated long-term phase and an
evolutionary strategy (ES) on the physical robot.
They note improved performance when the long-
term phase is implemented, and remark that the ES
provides continued adaptation to the environment,
but they deal with only five or 21 behaviour
parameters in the GA, and do not state the duration
of the long-term phase.
The method described here aims to capitalize on
the fast convergence speeds that a simulator can
achieve, but will also address the domain
compatibility issues by validating and, if necessary,
modifying all simulation-derived behaviours in the
real world. This will be achieved by transferring the
behaviours to an adaptive AIS that runs on a real
robot. The method is hence entirely practical for real
world situations, in terms of delivering a short
training-period, safe starting-behaviours, and a fully-
dynamic and adaptable system.
3 TEST ENVIRONMENT AND
PROBLEM
The long-term phase requires accelerated
simulations in order to produce the initial sets of
antibodies as rapidly as possible. For this reason the
Webots simulator (Michel, 2004) is selected as it is
able to run simulations up to 600 times faster than
real time, depending on computer power, graphics
card, world design and the number and complexity
of the robots used. The chosen robot is the e-puck
(see Figure 1), since the Webots c++ environment
natively supports it. It is a miniature mobile-robot
equipped with a ring of eight noisy, nonlinear, infra-
red (IR) sensors that can detect the presence of
objects up to a distance of about 0.1 m. It also has a
small frontal camera that receives the raw RGB
values of the images in its field-of-view. Blob-
finding software is created to translate this data into
groups of like-coloured pixels (blobs).
The test problem used here consists of a virtual
e-puck that must navigate around a building with
three rooms (see Figures 2 and 3) by tracking blue
markers painted on the walls. These markers are
intended to guide the robot through the doors, which
close automatically once the robot has passed
through. The course is completed once the robot has
crossed the finish-line in the third room, and its
performance is measured according to how quickly
it can achieve this goal, and how many times it
collides with the walls or obstacles placed in the
rooms. Two different test environments are used;
World 1 (see Figure 2) has fewer obstacles and no
other robots. World 2 (see Figure 3) contains more
obstacles, and there is also a dummy wandering-
robot in each room.
Figure 1: A simulated e-puck robot.
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS FOR MOBILE-ROBOT NAVIGATION
7
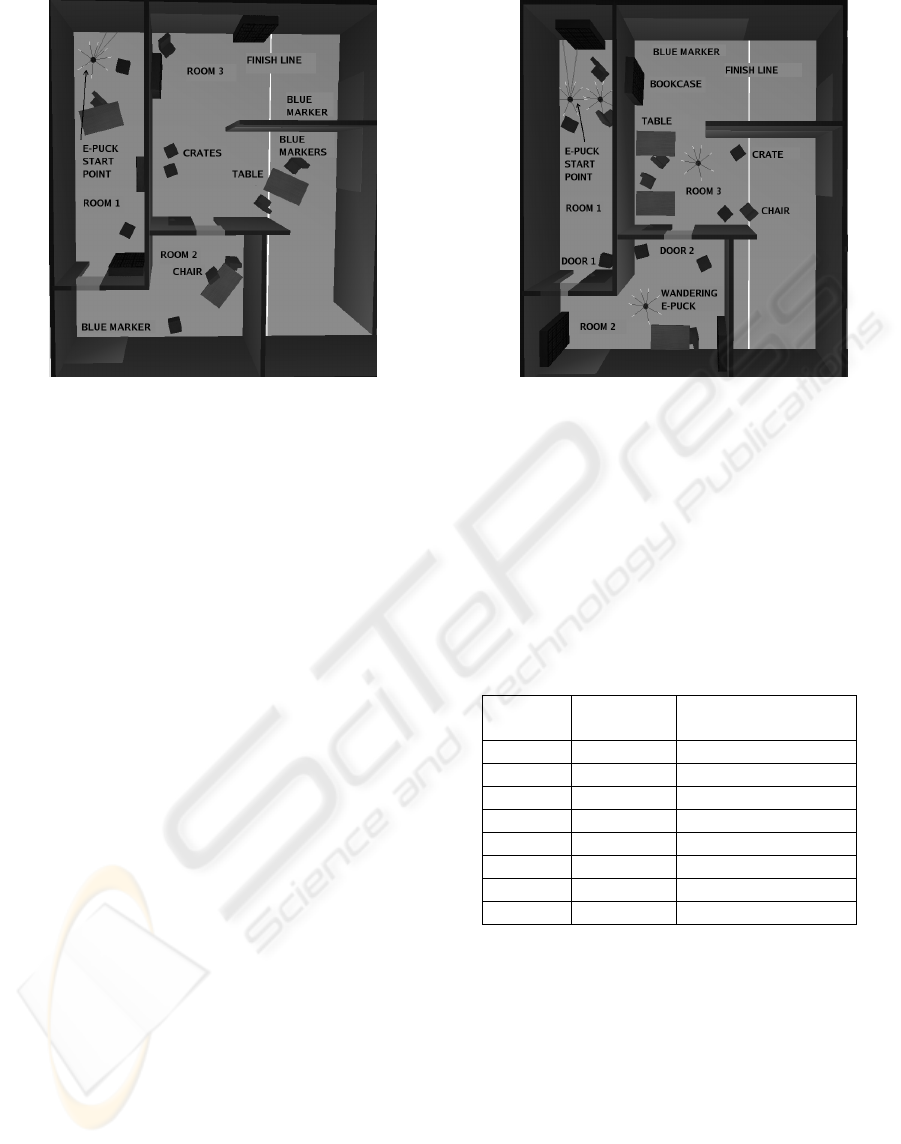
Figure 2: World 1 showing e-puck start point.
The simulations are run in fast mode (no
graphics) with Webots version 5.1.10 using
GNU/Linux 2.6.9 (CentOS distribution) with a
Pentium 4 processor (clock speed 3.6 GHz). The
graphics card used is an NVIDIA GeForce 7600GS,
which affords average simulation speeds of
approximately 200-times real-time for World 1 and
100-times real-time for World 2. The camera field-
of-view is set at 0.3 radians, the pixel width and
height at 15 and 3 pixels respectively and the speed
unit for the wheels is set to 0.00683 radians/s.
4 SYSTEM ARCHITECTURE
4.1 Antigens and Antibodies
The antigens model the environmental information
as perceived by the sensors. In this problem there are
only two basic types of antigen, whether a door-
marker is visible (a “marker” type) and whether an
obstacle is near (an “obstacle” type), the latter taking
priority over the former. An obstacle is detected if
the IR sensor with the maximum reading I
max
has
value V
max
equal to 250 or more. The IR sensors
correspond to the quantity of reflected light, so
higher readings mean closer obstacles. If no
obstacles are detected then the perceived antigen is
of type “marker” and there are two varieties,
“marker seen” and “marker unseen”, depending on
whether appropriate-coloured pixel-clusters have
been recognized by the blob-finding software. If an
obstacle is detected then the antigen is of type
“obstacle”, i.e. the robot is no longer concerned with
the status of the door-marker. The obstacle is classi-
Figure 3: World 2 showing e-puck start-point, dummy-
robot start-point and dummy-robot repositioning points.
fied in terms of both its distance from and its
orientation toward the robot. The distance is “near”
if V
max
is between 250 (about 0.03 m) and 2400
(about 0.01 m), and “collision” if V
max
is 2400 or
more. The orientation is “right” if I
max
is sensor 0, 1
or 2, “rear” if it is 3 or 4 and “left” if it is 5, 6 or 7
(see Figure 1). There are thus eight possible
antigens, which are coded 0–7, see Table 1.
Table 1: System antigens.
Antigen
Code
Antigen
Type
Name
0 Marker Marker unseen
1 Marker Marker seen
2 Obstacle Obstacle near right
3 Obstacle Obstacle near rear
4 Obstacle Obstacle near left
5 Obstacle Collision right
6 Obstacle Collision rear
7 Obstacle Collision left
The behaviours that form the core of the
antibodies are encoded using a structure that has the
attributes, type T, speed S, frequency of turn F, angle
of turn A, direction of turn D, frequency of right turn
R
f
, angle of right turn R
a
, and cumulative
reinforcement-learning score L. There are six types
of behaviour; wandering using either a left or right
turn, wandering using both left and right turns,
turning forwards, turning on the spot, turning
backwards, and tracking the door-markers. The
fusion of these basic behaviour-types with a number
of different attributes that can take many values
means that millions of different behaviours are
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
8
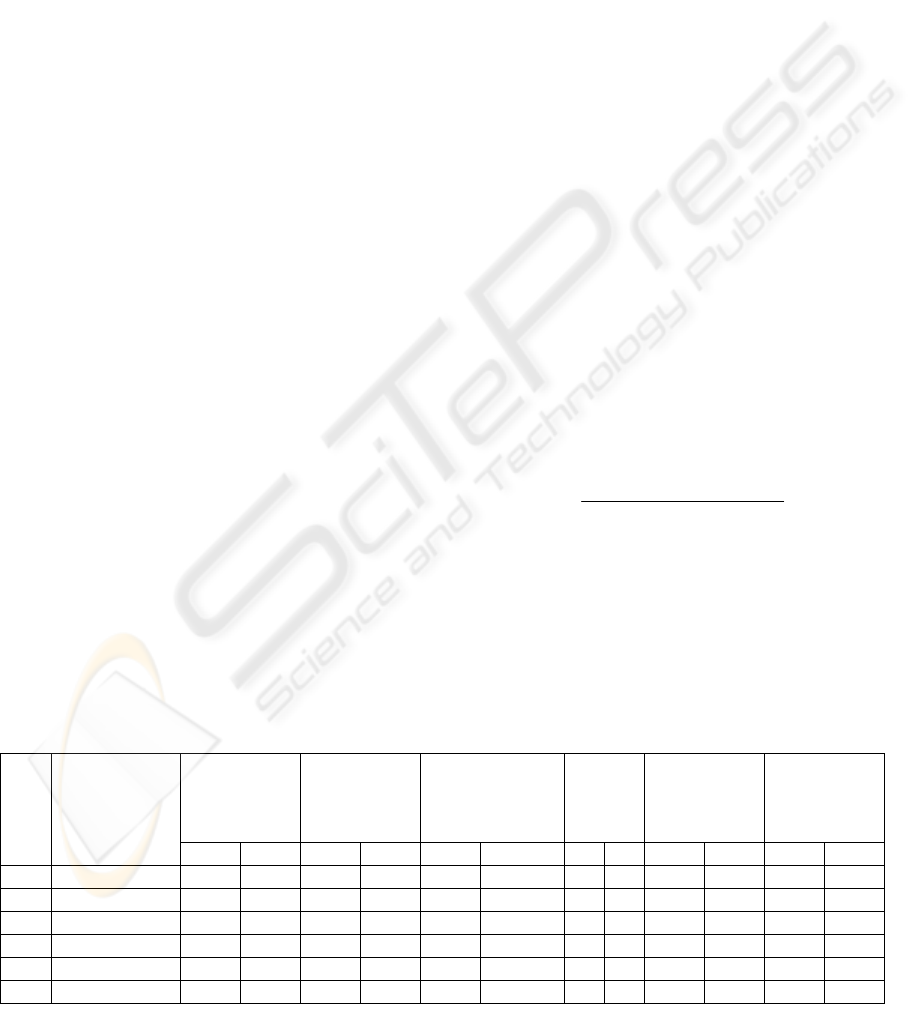
Table 2: System antibody types.
S
Speed Units / s
F
% of time
A
% reduction in
s
peed of one wheel
D
E
ither left
or right
R
f
% of time
R
a
%
reduction in
right wheel-
speed
No. Description
MIN MAX MIN MAX MIN MAX 1 2 MIN MAX MIN MAX
0
W
ander single 50 800 10 90 10 110 L R - - - -
1
W
ander both 50 800 10 90 10 110 - - 10 90 10 110
2 orward turn 50 800 - - 20 200 L R - - - -
3 tatic turn 50 800 - - 100 100 L R - - - -
4
R
everse turn 500 800 - - 20 200 L R - - - -
5
T
rack markers 50 800 - - 0 30 - - - - - -
possible. However, some behaviour types do not use
a particular attribute and there are limits to the
values that the attributes can take. These limits are
carefully selected in order to strike a balance
between reducing the size of the search space, which
increases speed of convergence, and maintaining
diversity, see Table 2.
4.2 System Structure
The control program uses the two-dimensional array
of behaviours B
ij
, i = 0, …, x-1, j = 0, …, y-1, where
x is the number of robots in the population (x ≥ 5)
and y is the number of antigens, i.e. eight. When the
program begins i is equal to zero, and the array is
initialized to null. The infra-red sensors are read
every 192 milliseconds and the camera is read every
384 milliseconds, but only if no obstacles are found,
as this increases computational efficiency.
Once an antigen code is determined, a behaviour
or antibody is created to combat it by randomly
choosing a behaviour type and its attribute values.
For example, the behaviour WANDER_SINGLE
(605, 50, 90, LEFT, NULL, NULL) may be created.
This behaviour consists of travelling forwards with a
speed of 605 Speed Units/s, but turning left 50% of
the time by reducing the speed of the left wheel by
90%. If the antigen code is 7 then the S, F, A, D, R
f
and R
a
attributes of B
07
take the values 605, 50, 90,
LEFT, NULL, NULL respectively. The action is
executed and the sensor values are read again to
determine the next antigen code. If the antigen has
been encountered before, then the behaviour
assigned previously is used, otherwise a new
behaviour is created. The algorithm proceeds in this
manner, creating new behaviours for antigens that
have not been seen before and reusing the
behaviours allotted to those that have.
However, the performance of the behaviours in
dealing with the antigen they have been allocated to
is constantly assessed using reinforcement learning
(see section 4.4), so that poorly-matched behaviours
can be replaced with newly-created ones when the
need arises. Behaviours are also replaced if the
antigen has not changed in any 60-second period, as
this most likely means that the robot has not
undergone any translational movement. The
cumulative reinforcement-score of the previously
used behaviour L is adjusted after every sensor
reading, and if it falls below the threshold value of
-14 then replacement of the behaviour occurs. The
control code also records the number of collisions c
i
for each robot in the population.
A separate supervisor-program is responsible for
returning the virtual robot back to its start-point once
it has passed the finish-line, for opening and closing
the doors as necessary, and for repositioning the
wandering dummy-robot, so that it is always in the
same room as the mission robot. Another of the
supervisor’s functions is to assess the time taken t
i
to
complete the task. Each robot is given 1250 seconds
to reach the end-point; those that fail receive a 1000-
second penalty if they did not pass through any
doors. Reduced penalties of 750 or 500 seconds are
awarded to failing robots that pass through one door
or two doors respectively. When the whole
population has completed the course, the relative-
fitness μ
i
of each individual is calculated. Since high
values in terms of both t
i
and c
i
should yield a low
relative-fitness, the following formula is used:
.
)()(
1
1
0
1
∑
−
=
−
++
=
x
k
kkii
i
ctct
μ
(1)
The five fittest robots in the population are
selected, and their mean t
n
, c
n
and absolute-fitness f
n
are calculated, where n represents the generation
number, and f
n
= t
n
+ c
n
. In addition, the value of f
n
is compared with that of the previous generation f
n-1
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS FOR MOBILE-ROBOT NAVIGATION
9
to assess rate-of-convergence. The genetic algorithm
is complete when any of the four conditions shown
in Table 3 are reached. These are selected in order to
achieve fast convergence, but also to maintain a high
solution quality. Once convergence is achieved the
attribute values representing the behaviours of the
five fittest robots are saved for seeding the AIS
system. If there is no convergence then the GA
proceeds as described in section 4.3.
Table 3: Stopping criteria.
Criteria - World 1 Criteria - World 2
1
n > 0 AND t
n
< 400 AND
c
n
< 60 AND |f
n
– f
n-1
| <
0.1
n > 0 AND t
n
< 600 AND
c
n
< 90 AND |f
n
– f
n-1
| <
0.2
2 n > 30 n > 30
3 t
n
< 225 AND c
n
< 35 t
n
< 400 AND c
n
< 45
4
n > 15 AND |f
n
– f
n-1
| <
0.1
n > 15 AND |f
n
– f
n-1
| <
0.2
Note that when adopting the scenario of five
separate populations that never interbreed, the five
robots that are assessed for convergence are the
single fittest from each of the autonomous
populations. In this case, convergence is dependent
upon the single best t
n
, c
n
and f
n
values. The final
five robots that pass their behaviours to the AIS
system are the single fittest from each population
after convergence.
4.3 The Genetic Algorithm
Two different parent robots are selected through the
roulette-wheel method and each of the x pairs
interbreeds to create x child robots. This process is
concerned with assigning behaviour attribute-values
to each of the x new robots for each of the y antigens
in the system. It can take the form of complete
antibody replacement, attribute-value mutation,
adoption of the attribute values of only one parent or
crossover from both parents.
Complete antibody replacement occurs according
to the prescribed mutation rate ε. Here, a completely
new random behaviour is assigned to the child robot
for the particular antigen, i.e. both the parent
behaviours are ignored.
Crossover is used when there has been no
complete replacement, and the method used depends
on whether the parent behaviours are of the same
type. If the types are different then the child adopts
the complete set of attribute values of one parent
only, which is selected at random. If the types are
the same, then crossover can occur by taking the
averages of the two parent values, by randomly
selecting a parent value, or by taking an equal
number from each parent according to a number of
set patterns. In these cases, the type of crossover is
determined randomly with equal probability. The
purpose behind this approach is to attempt to
replicate nature, where the offspring of the same two
parents may differ considerably each time they
reproduce.
Mutation of an attribute value may also take
place according to the mutation rate ε, provided that
complete replacement has not already occurred.
Here, the individual attribute-values (all except D)
of a child robot may be increased or decreased by
between 20% and 50%, but must remain within the
prescribed limits shown in Table 2.
4.4 Reinforcement Learning
Reinforcement learning is used in order to accelerate
the speed of the GA’s convergence. It can be
thought of as microcosmic short-term learning
within the long-term learning cycle. The
reinforcement works by comparing the current and
previous antibody codes, see Table 4. Ten points are
awarded for every positive change in the
environment, and ten are deducted for each negative
change. For example, 20 points are awarded if the
antigen code changes from an “obstacle” type to
“marker seen”, because the robot has moved away
from an obstacle as well as gaining or keeping sight
of a door-marker.
Table 4: Reinforcement scores.
Antigen code
Old New
Reinforcement status (score)
0 0 Neutral (0)
1 0 Penalize - Lost sight of marker (-10)
2-7 0 Reward - Avoided obstacle (10)
0 1 Reward - Found marker (10)
1 1 Reward – Kept sight of marker
(Score depends on orientation of
marker with respect to robot)
2-7 1 Reward - Avoided obstacle and gained
or kept sight of marker (20)
0 2-7 Neutral (0)
1 2-7 Neutral (0)
2-7 2-7 Reward or Penalize
(Score depends on several factors)
In the case where the antigen code remains at 1 (a
door-marker is kept in sight), the score awarded
depends upon how the orientation of the marker has
moved with respect to the robot. In addition, when
an obstacle is detected both in the current and
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
10
previous iteration, then the score awarded depends
upon several factors, including changes in the
position of I
max
and in the reading V
max
, the current
and previous distance-type (“collision” or “near”)
and the tallies of consecutive “nears” and
“collisions”.
5 EXPERIMENTAL
PROCEDURES
5.1 General Procedures
The GA is run in Worlds 1 and 2 using single
populations of 25, 40, and 50 robots, and using five
autonomous populations of five, eight, and ten. A
mutation rate ε of 5% is used throughout, as
previous trials have shown that this provides a good
compromise between fast convergence, high
diversity and good solution-quality. Solution quality
is measured as q = (t + 8c)/2, as this allows equal
weighting for the number of collisions. For each
scenario, ten repeats are performed and the means of
the program execution time τ, solution quality q, and
diversity in type Z
t
and speed Z
s
are recorded. The
mean solution-quality is also noted when 240 repeats
are performed in each world using a hand-designed
controller. This shows how well the GA-derived
solutions compare with an engineered system and
provides an indication of problem difficulty. Two–
tailed standard t-tests are conducted on the result
sets, and differences are accepted as significant at
the 99% level only.
In World 2 the stopping criteria is relaxed in
order to improve convergence speed, see Table 3.
This is necessary since there are more obstacles and
moving robots to navigate around, which means that
completion time is affected.
5.2 Measuring Diversity
Diversity is measured using the type T and the speed
S attributes of each of the final antibodies passed to
the AIS system, since these are the only action-
controlling attributes that are common to all
antibodies. The antibodies are arranged into y groups
of five (y is the number of antigens) and each group
is assessed by comparison of each member with the
others, i.e. ten pair-wise comparisons are made in
each group. A point is awarded for each comparison
if the attribute values are different; if they are the
same no points are awarded. For example, the set of
behaviour types [1 3 4 4 1] has two pair-wise
comparisons with the same value, so eight points are
given. Table 5 summarizes possible attribute-value
combinations and the result of conducting the pair-
wise comparisons on them.
Table 5: Diversity scores.
Expected: Attribute-
value status
Points
Frequency
for T
Score for
T
All five different 10 9.26 0.926
One repeat of two 9 46.30 4.167
Two repeats of two 8 23.15 1.852
One repeat of three 7 15.43 1.080
Two repeats, one
of two, one of three
6 3.86 0.231
One repeat of four 4 1.93 0.077
All five the same 0 0.08 0.000
Total 100.00 8.333
The y individual diversity-scores for each of T
and S are summed and divided by σy to yield a
diversity score for each attribute. Here σ is the
expected diversity-score for a large number of
randomly-selected sets of five antibodies. This is
approximately 8.333 for T (see Table 5) and 10.000
for S. It is lower for T since there are only six
behaviours to select from, whereas the speed is
selected from 751 possible values, so one would
expect a random selection of five to yield a different
value each time. The adjustment effectively means
that a random selection yields a diversity of 1 for
both S and T. The diversity calculation is given by:
y
z
Z
y
i
i
σ
∑
=
=
1
,
(2)
where Z represents the overall diversity-score and z
represents the individual score awarded to each
antigen.
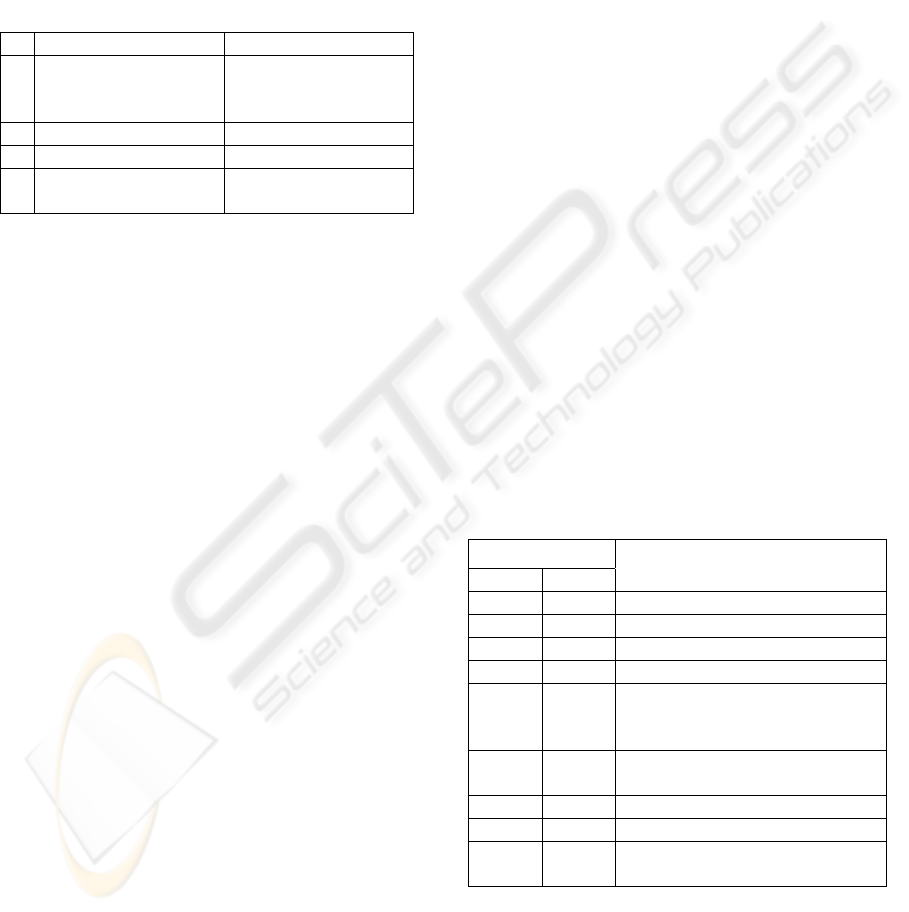
6 RESULTS AND DISCUSSION
Table 6 presents mean τ, q, Z
t
, and Z
s
values in
World 1, and Table 7 summarises the significant
difference levels when comparing single and
multiple populations. The schemes that are
compared use the same number of robots, for
example a single population of 25 is compared with
five populations of five. In addition, the smallest and
largest population sizes are compared for both single
and multiple populations.
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS FOR MOBILE-ROBOT NAVIGATION
11
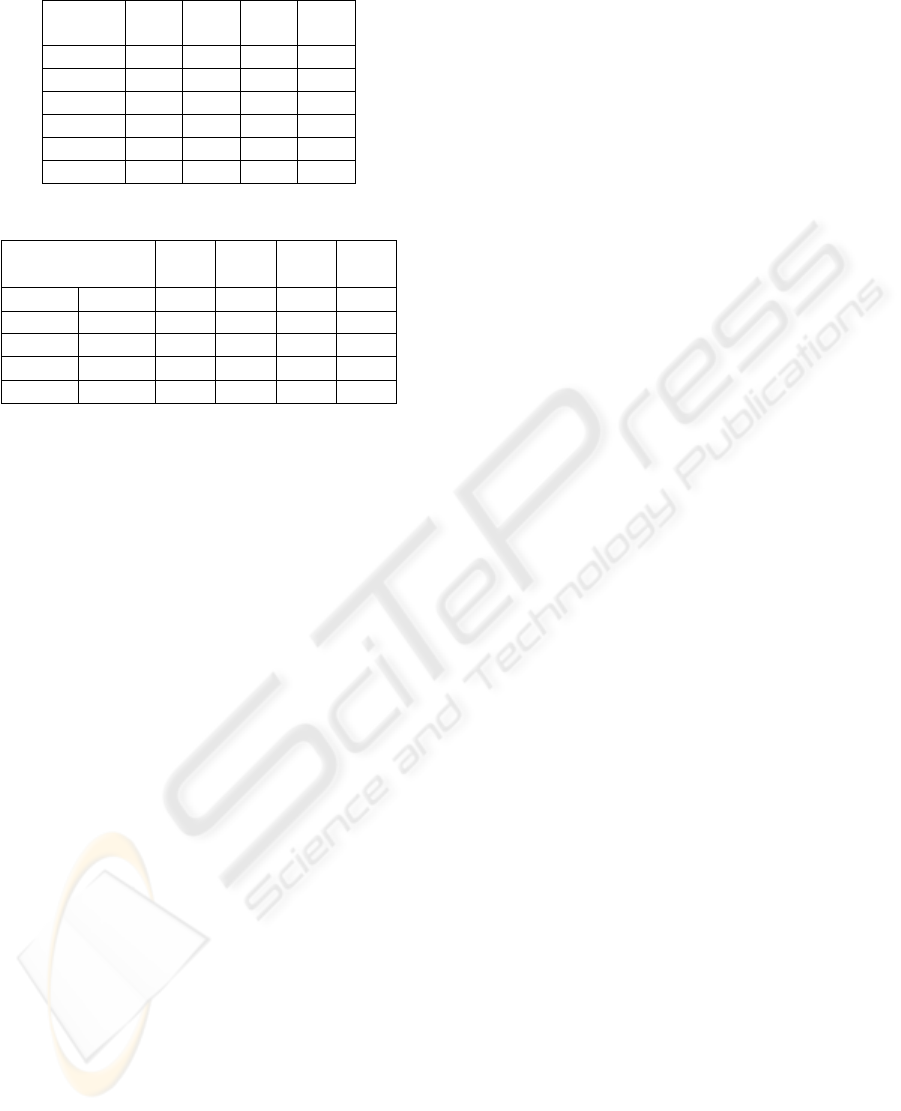
Table 6: World 1 means.
Pop.
size
τ (s) q Z
t
(%)
Z
s
(%)
25 417 220 40 86
40 530 216 53 95
50 811 191 49 90
5 x 5 508 155 55 100
5 x 8 590 146 54 100
5 x 10 628 144 58 100
Table 7: World 1 significant differences.
Comparison τ (s) q Z
t
(%)
Z
s
(%)
25 5 x 5 77.40 99.94 99.90 99.99
40 5 x 8 72.58 99.97 43.07 99.97
50 5 x 10 97.13 99.80 98.36 99.96
25 50 99.99 91.76 96.10 75.81
5 x 5 5 x 10 88.41 58.13 60.40 00.00
The tables show that there are no significant
differences between controller run-times when
comparing the single and multiple populations. Type
diversity is consistently higher for the multiple
populations, but only significantly higher when
comparing a single population of 25 with five
populations of five. However, solution quality and
speed diversity are significantly better for the
multiple populations in all three cases. Multiple
populations always demonstrate a speed diversity of
100%, indicating that the final-selected genes are
completely unrelated to each other, as expected. In
contrast, single-population speed-diversity never
reaches 100% as there are always repeated genes in
the final-selected robots. Evidence from previous
experiments with single populations of five, ten and
20 suggests that the level of gene duplication
decreases as the single population size increases.
This explains the lower Z
t
and Z
s
values for a
population of 25 robots. However, when comparing
the results from single populations of 25 with 50, the
only significant difference is in the run-time, with
25-robot populations running much faster. This is
intuitive, since fewer robots must complete the
course for every generation. There are no significant
differences when comparing five-robot and ten-robot
multiple populations. Run-times may be comparable
here because the course has to be completed fewer
times for the smaller population, but it requires more
generations for convergence since there seems to be
a reduced probability of producing successful robots.
In all cases, mean type-diversity ratings never
reach 100%, yet mean speed-diversity is always
100% in the multiple populations, which shows
there are no repeated genes. The reduced type-
diversity ratings must therefore occur because the
types are not randomly selected but chosen in a more
intelligent way. The relatively small number of types
(six) means that intelligent selection reduces the type
diversity, whereas speed diversity is unaffected
because there are many potentially-good speeds to
choose from and convergence is rapid. It is likely
that both intelligent selection and repeated genes
decrease the type-diversity scores for the single
populations, but in the multiple populations, the
phenomenon is caused by intelligent selection only.
The hand-designed controller demonstrates a
mean solution-quality of 336. (The scores from the
49 robots that failed to complete the course are not
counted.) This is significantly worse than all of the
multiple populations, but not significantly different
to the single populations, although single-population
quality scores are considerably better. The multiple
populations may have an advantage over the single
populations in terms of solution quality because, for
each population, they require a fast time and few
collisions for only one member in order to meet the
convergence criteria. The single-population case
demands good mean-scores from five robots.
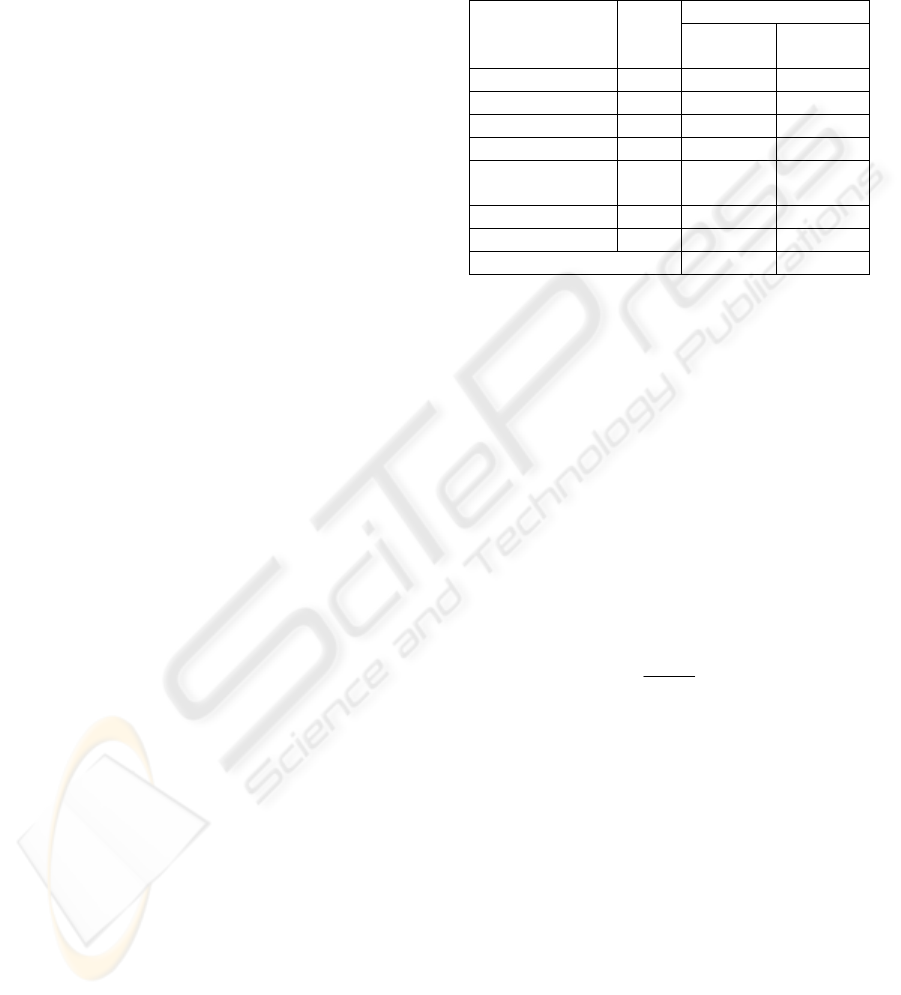
Table 8 presents the significant difference levels
when comparing the results from World 1 with those
from World 2. There is a significant difference in
run-time in every case, which is not surprising
because the GAs in World 2 take, on average, 2.25
times as long to converge. This is partly due to the
World 2 simulations running only half as fast as
those in World 1 (because there are two robots to
control) and partly because the problem is harder to
solve. There are also significant differences in
solution quality for 50-robot single populations and
all the multiple populations, with World 2 producing
the lower-quality solutions. (The 25-robot and 30-
robot populations are almost significant.) This
difference is due to the less-stringent convergence
criteria in World 2. There are no significant
differences in type diversity or speed diversity
between the two worlds.
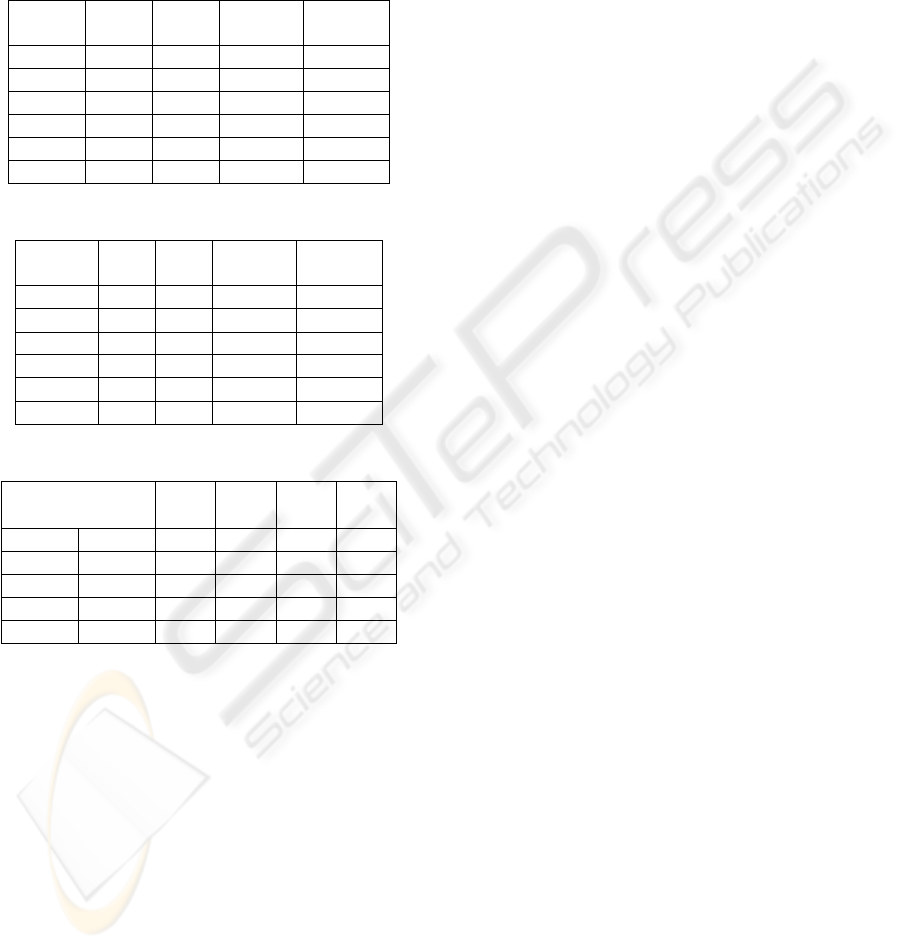
Tables 9 and 10 summarise the same data as
Tables 6 and 7, but for World 2. When comparing
single with multiple populations, the results reveal a
similar pattern to World 1 in terms of run-time, type
diversity and speed diversity, i.e., there are no
significant differences between run-times, although
they are slightly higher for the multiple populations.
Type diversity is consistently better for the multiple
populations, but only significantly higher when
comparing a single population of 25 with a five-
robot multiple population. Speed diversity is
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
12
consistently significantly higher for the multiple
populations, with all multiple populations producing
100% diversity. However, unlike World 1, there are
no significant differences in solution quality,
although the figures for the multiple populations are
better in each case.
Table 8: World 1 compared with World 2.
Pop.
size
τ (s) q Z
t
(%) Z
s
(%)
25 99.99 97.61 50.34 11.19
40 99.99 96.61 24.70 84.41
50 99.93 99.97 80.09 87.67
5 x 5 99.99 99.99 57.16 66.94
5 x 8 100.00 99.99 14.38 0.00
5 x 10 100.00 99.86 27.51 66.94
Table 9: World 2 means.
Pop.
size
τ (s) q Z
t
(%) Z
s
(%)
25 972 314 37 85
40 1292 266 51 89
50 1414 250 56 94
5 x 5 1211 258 58 100
5 x 8 1325 225 55 100
5 x 10 1498 208 57 100
Table 10: World 2 significant differences.
Comparison τ (s) q
Z
t
(%)
Z
s
(%)
25 5 x 5 88.47 84.51 99.96 99.63
40 5 x 8 20.91 94.09 61.19 99.28
50 5 x 10 40.78 97.31 18.34 99.87
25 50 98.79 90.17 99.50 93.43
5 x 5 5 x 10 94.36 97.97 22.16 00.00
When comparing the results from single
populations of 25 robots with 50 robots, the only
significant difference is in type diversity, with 50-
robot populations producing more diverse sets of
behaviour type. Since type diversity is also
significantly higher in the five-robot multiple
populations, this suggests there may be a threshold
single population size, below which single
populations are significantly less diverse in
behaviour-type than their multiple-population
counterparts. There are no significant differences
when comparing five-robot and ten-robot multiple
populations, although the higher solution-quality for
ten robots almost reaches significance.
In World 2 the hand-designed controller
produces a mean solution-quality of 623 (not
counting the results from the 109 robots that failed
to complete the course). The performance is
significantly worse than the GA-derived solutions
from both the single and multiple populations in
World 2.
7 CONCLUSIONS AND FUTURE
WORK
This paper has described a GA method for
intelligently seeding an idiotypic-AIS robot control-
system, i.e. it has shown how to prepare an initial set
of antibodies for each antigen in the environment.
Experiments with static and dynamic worlds have
produced solution-sets with significantly better mean
solution-quality than a hand-designed controller, and
the system has been able to deliver the starting
antibodies within about ten minutes in the static
world, and within about 25 minutes in the dynamic
world. These are fast results compared with GAs
that have used physical robots and reported
convergence in terms of number of days rather than
minutes. The method hence provides a practical
training-period when considering real-world tasks.
The resulting antibody sets have also been tested
for quality and diversity, and it has been shown that
significantly higher antibody diversity can be
obtained when a number of autonomous populations
are used, rather than a single one. For sets of five
populations, the mean diversity of antibody speed is
100%, and one can run the genetic algorithm without
significantly increasing the convergence time or
reducing solution quality. In fact, for simpler
problems, multiple populations may help to improve
solution quality. Results have also shown that the
diversity ratings are not affected by the difficulty of
the problem.
The potential of the method to create high
behaviour-diversity augurs well for the next stage of
the research, which is transference to a real robot
running an AIS. This part of the work will
investigate how the idiotypic-selection process
should choose between the available solutions, and
how antibodies should be replaced within the system
when they have not proved useful. The work will
also examine how closely the simulated-world needs
to resemble the real-world in order that the initial
solutions are of benefit.
GENETIC-ALGORITHM SEEDING OF IDIOTYPIC NETWORKS FOR MOBILE-ROBOT NAVIGATION
13

REFERENCES
Brooks, R. A., 1992. Artificial life and real robots. In F. J.
Varela and P. Bourgine (Eds.) Toward a Practice of
Autonomous Systems: Proceedings of the First
European Conference on Artificial Life. Cambridge,
MA: MIT Press.
Farmer, J. D., Packard, N. H., Perelson, A. S., 1986. The
immune system, adaptation, and machine learning.
Physica, D, Vol. 2, Issue 1-3, 187-204.
Floreano, D., Mondada, F., 1996. Evolution of homing
navigation in a real mobile robot. IEEE Transactions
on Systems, Man, and Cybernetics- Part B:
Cybernetics, Vol. 26, No. 3, 396-407
Floreano, D., Urzelai, J., 2000. Evolutionary robots with
on-line self-organization and behavioural fitness.
Neural Networks, Vol. 13, 431-443.
Hart, E., Ross, P., Webb, A., Lawson, A., 2003. A role for
immunology in ‘next generation’ robot controllers. In
Proceedings of the 2nd International Conference on
Artificial Immune Systems, 46-56.
Hornby, G., Takamura, S., Yokono, J., Hanagata, O.,
Yamamoto, T., Fujita, M., 2000. Evolving robust gaits
with AIBO. In Proceedings of the IEEE International
Conference on Robotics and Automation (ICRA),
3040-3045.
Jerne, N. K., 1974. Towards a network theory of the
immune system. Ann. Immunol. (Inst Pasteur), 125 C,
373-389.
Keymeulen, D., Iwata, M., Kuniyoshi, Y., Higuchi, T.,
1998. Comparison between an off-line model-free and
an on-line model-based evolution applied to a robotics
navigation system using evolvable hardware. In
Artificial Life VI: Proceedings of the 6th International
Conference on Artificial Life, 199-209.
Krautmacher, M., Dilger, W., 2004. AIS based robot
navigation in a rescue scenario. Lecture Notes
Computer Science, 3239, 106-118.
Luh, G. C., Liu, W. W., 2004. Reactive immune network
based mobile robot navigation. Lecture Notes
Computer Science, 3239, 119-132.
Marocco, D., Floreano, D., 2002. Active vision and
feature selection in evolutionary behavioural systems.
In From Animals To Animats: Proceedings of the 7
th
International Conference on Simulation of Adaptive
Behaviour (SAB-02), 247-255.
Michel, O., 2004. Cyberbotics Ltd – WebotsTM:
Professional Mobile Robot Simulation. International
Journal of Advanced Robotic Systems, Volume 1,
Number 1, 39-42.
Michelan, R., Von Zuben, F. J., 2002. Decentralized
control system for autonomous navigation based on an
evolved artificial immune network. In Proceedings of
the 2002 Congress on Evolutionary Computation, Vol.
2, 1021-1026.
Nehmzow, U., 2002. Physically embedded genetic
algorithm learning in multi-robot scenarios: the PEGA
algorithm. In Proceedings of the 2
nd
International
Workshop on Epigenetic Robotics: Modeling
Cognitive Development in Robotic Systems.
Vargas, P. A., de Castro, L. N., Michelan, R., 2003. An
immune learning classifier network for autonomous
navigation. Lecture Notes Computer Science, 2787,
69-80.
Walker, J. H., Garrett, S. M., Wilson, M. S., 2006. The
balance between initial training and lifelong adaptation
in evolving robot controllers. IEEE Transactions on
Systems, Man and Cybernetics- Part B: Cybernetics,
Vol. 36, No. 2, 423-432.
Watanabe, Y., Ishiguro, A., Shirai, Y., Uchikawa, Y.,
1998a. Emergent construction of behavior arbitration
mechanism based on the immune system. In
Proceedings of the 1998 IEEE International
Conference on Evolutionary Computation, (ICEC),
481-486.
Watanabe, Y., Kondo, T., Ishiguro, A., Shirai, Y.,
Uchikawa, Y., 1998b. Evolutionary construction of an
immune network-based behavior arbitration
mechanism for autonomous mobile robots. Electrical
Engineering in Japan, Vol. 123, No. 3, 1-10.
Watson, R. A., Ficici, S. G., Pollack, J. B., 1999.
Embodied evolution: A response to challenges in
evolutionary robotics. In J. L. Wyatt and J. Demiris
(Eds.) Proceedings of the Eighth European Workshop
on Learning Robots, 14-22.
Whitbrook, A. M., Aickelin, U., Garibaldi, J. M., 2007.
Idiotypic Immune Networks in Mobile Robot Control.
IEEE Transactions on Systems, Man and Cybernetics-
Part B: Cybernetics, Vol. 37, No. 6, 1581-1598.
Zykov, V., Bongard, J., Lipson, H., 2004. Evolving
dynamic gaits on a physical robot. In Proceedings of
The Genetic and Evolutionary Computation
Conference (GECCO), Late Breaking Papers.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
14
