
TEMPORAL MATCH OF MULTIPLE SOURCE DATA IN AN
ETHERNET BASED INDUSTRIAL ENVIRONMENT
Daniela Hossu and Andrei Hossu
University Politehnica of Bucharest, Faculty of Control and Computers
313 Spl. Independentei, sector 6, RO-77206, Bucharest, Romania
Keywords: Industrial Robotic Application, Ethernet-based communication, Data transfer consistency, Artificial Vision
System, Control Management System, Routing Control System.
Abstract: The actual stream in automation control systems is to distribute the control tasks among different modular
and easy to integrate processing cells. It is part of this trend the increase of the use of Ethernet technology
for machine-machine data communication inside this distributed based architecture. The paper presents a
robotic handling application of industrial parts transferred by a transport conveyor. Data representing a set
of parameters of the parts to be handle from the conveyor is provided by a Routing Control System (RCS).
The Control Management System (CMS), which controls a number of robotic cells is receiving this data
from RCS and merge it with the information provided by an Inspection System (Artificial Vision System).
The communication between these two Control Systems (RCS and CMS) is Ethernet-based. Ethernet
technology is good, reliable and fast for large amount of data, but because of its non-deterministic character,
it has a lack of tools for data synchronization. The paper includes an analysis of the experimental results of
the measurements of the non-deterministic factor of the existing network. The "worst case scenario" of the
largest communication delay caused by Ethernet traffic and the minimum time between two consecutive
data commands, reveals that application requirements could not be achieved without recovering data
transfer time-consistency. The paper is presenting a mechanism developed at protocol level, in order to
guarantee the consistency in time, at CMS level (data consumer), of the merging process of the data
provided by the two application partners, RCS and Vision System as the data producers.
1 THE DESCRIPTION OF THE
ROBOTIC APPLICATION
The system described in the paper is dedicated for
the robot-based automation of the unloading and
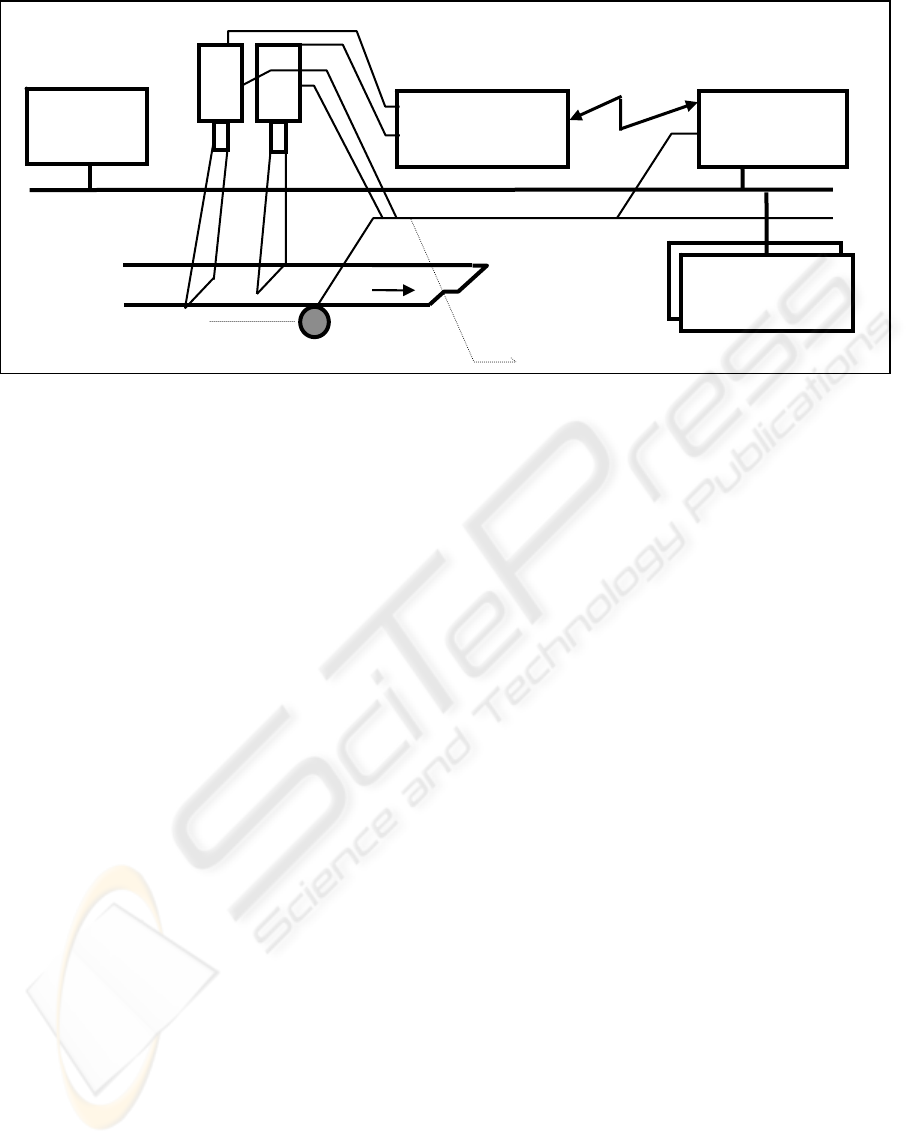
packing stages in the flat glass industry. In Figure 1
it is presented the architecture of the proposed
automation system. This architecture is often utilized
in industrial applications (in palletizing of moving
objects systems).
1.1 The Structural System
Architecture
Active Elements:
Control Management System (CMS), Routing
Control System (RCS), Vision System and Robotic
Cells.
Passive Elements:
Conveyor, glass plates.
Infrastructure:
Communicational Link between Vision System
and CMS;
Communicational Link between CMS and
Robots Controllers;
Communicational Link between CMS and RCS.
General assumptions:
The plates are connected to the conveyor (the
same speed and direction).
1.2 The Functional System
Architecture
The Routing Control System has to provide for CMS
the Routing Data - a description of the possible
destinations (one or more of the robotic cells) of
each plate in the moment the plate is passing the
Decision Point of the Vision System. The role of the
Vision System is to inspect the cutting accuracy and
the shape parameters of every plate. The Vision
140
Hossu D. and Hossu A. (2008).
TEMPORAL MATCH OF MULTIPLE SOURCE DATA IN AN ETHERNET BASED INDUSTRIAL ENVIRONMENT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 140-144
DOI: 10.5220/0001476301400144
Copyright
c
SciTePress
System is analyzing the information provided by a
Line Scan Acquisition System (a dual line scan
camera system) in conjunction with the information
provided by an encoder connected to the transport
conveyor. The Vision Data, containing the data
resulted from the inspection process, together with
the data describing the location of the plate, are
transmitted to CMS in the moment the Vision
System processing time ended.
The moment (time-based) is called Vision
Decision Point. Both sets of data (Routing Data and
Vision Data) are merged by CMS. CMS will take
the decision to send the pick the plate command to a
certain robotic cell only if Vision Data describe the
plate having cutting accuracy and shape parameters
inside the accepted tolerances for a certain packing
destination AND the plate is routed to that certain
destination.
2 THE DESCRIPTION OF THE
INFORMATIONAL SYSTEM
ARCHITECTURE
The communication between Vision System and
CMS is a dedicated connection. Some of the reasons
for choosing this type of communication is the
geographical neighborhood of these two systems and
the fact the structure of the data transferred between
Vision System and CMS could be very tight
specified (no need for using a general type of
protocol). Another reason is the concept that Vision
System is an intelligent sensor of the Robotic
Application, which means the Vision System will be
not “visible” on the higher automation level, but
only on the Robotic Automation Level (the Vision
System is “visible” only for CMS). This
communication channel has a serial support. This
type of connection is providing a deterministic
character of the Vision System – CMS
communication. For the communication between
CMS and RCS it was adopted an Ethernet-based
topology. The main reason of choosing this type of
topology is the fact CMS is an automation entity
visible on the high automation level (CMS includes
all the automated stacking capabilities of the whole
production line). Industrial Protocol on Ethernet is a
very good and reliable support for modern
configurations on industrial automations, but
because it’s non-deterministic character, it is poor in
data time-synchronization (Marshall, et al., 2004).
The time-synchronization between the Routing Data
(data coming from RCS) and the Vision Data (data
coming from Vision) in the merging process in CMS
it is a key factor of achieving the requirements of the
automation application.
3 EXPERIMENTAL RESULTS
In Figure 2 are presented the experimental results of
recording Ethernet Delays over around 10 minutes
on the analyzed network. The Ethernet Delays are
estimated as the differences between the CPU time
of receiving Routing Data (sent over a non-
deterministic communication channel) and the CPU
time of receiving Vision Data (sent over a
deterministic communication channel). A lost in
Artificial Vision
System
CMS
Encoder
Encoder Pulses
LAN
Conveyor
Robot
Controller
Dedicated connection
RCS
Figure 1: The robot-based automation system for handling glass plates from a moving conveyor.
TEMPORAL MATCH OF MULTIPLE SOURCE DATA IN AN ETHERNET BASED INDUSTRIAL ENVIRONMENT
141

synchronization will occur only if the variation of
the Ethernet Delay value from the average value of
the Ethernet Delay is greater than the minimum time
between two consecutive sets of Routing Data.
Analyzing the manufacturing process we can
identify what is the minimum time between two
consecutive sets of Routing Data.
This is the minimum time between two glass plates
coming on the conveyor (this is called “snapping
period”). The actual glass manufacturing process has
the minimum snapping period of 1.44 seconds.
Analyzing the experimental results we could see the
necessity of implementing a method for recovering
data transfer time-consistency.
4 RECOVERING DATA
TRANSFER
TIME-CONSISTENCY
A few solutions were analyzed in order to solve this
problem (Marshall, et al., 2004).:
- Use a more powerful Ethernet board
(instead of using 10MB/s type of board, to use a
100BT Ethernet module)
- Replace the communication software
support (RSLinx) with another one with a better
response time (a software module dedicated
only for a specific protocol would provide a
better response time related to a general
software package like RSLinx, which is coming
with a large CPU overhead).
The above two solutions could improve the
Ethernet behavior, but the non-deterministic
character of this type of communication is not
eliminated.
- Install another dedicated Ethernet module
in the RCS and an additional dedicated Ethernet
module in the CMS PC. These modules would
be connected to a separate isolated Ethernet
switch. In this case, most of the delays
experienced on the current Ethernet link would
be eliminated since the only traffic on the link
would be between the routing system and the
CMS cell PC.
- Use an ASCII serial (RS-232, RS-485,
etc.) connection rather than using Ethernet. This
would make the communication time between
the Routing and CMS systems deterministic.
- Use a dedicated digital signal from RCS to
the CMS in addition of the Ethernet connection
in order be used to re-synchronize the Routing
Data in CMS. This would be implemented by
energizing a digital output that would indicate
to the CMS cell in the moment of sending
current Routing Data. When the input was seen
by the CMS system, the CMS system would
capture its own internal time and it will use this
time value in the moment the Routing Data is
received over Ethernet.
These last three solutions could solve the time-
synchronization problem, but any of these solutions
wouldn’t be accepted because of a dramatic
aggression on the network topology previously
agreed on the design time of the application
(Mackay, et al., 2003), (Stenerson, et al., 2002).
The solution proposed in the paper is based on
inserting a “timestamp parameter” in any set of
Routing Data transmitted from the Routing System
to the Control Management System.
This timestamp parameter will be the Routing
System CPU time in millisecond representation.
This timestamp parameter value will be a
wraparound counter representing the least significant
two bytes (one Word) of the CPU time (in
milliseconds).
This timestamp parameter will be used by CMS
to estimate with a “good enough” approximation, the
offset between the CPU time values of the producer
of the message (RCS) and the consumer of the
message (CMS). This estimated offset would be
used for time synchronization of the current
message. It means CMS will add the estimated CPU
time values offset to the current timestamp
parameter value contained in the current received
message.
In order to provide a “good enough”
approximation of the offset between the CPU time
values of the producer (RCS) and the consumer
(CMS) the algorithm has to estimate the minimum
value of the statistical population containing all the
offsets estimated for a large number of
transmitted/received messages.
This minimum is a “moving minimum” (it will
be estimated from a statistical population collected
on a certain time window) because we expect a
slippage between the clocks of the two CPU (this
slippage is accumulative and will become significant
in time).
For the support of building this statistical
population of offset values is used an existing
message from RCS to CMS, called “Request Status
Message”.
This message is sent by RCS every half a second
in order to check the communication with CMS and
also to obtain from the CMS the status of the
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
142
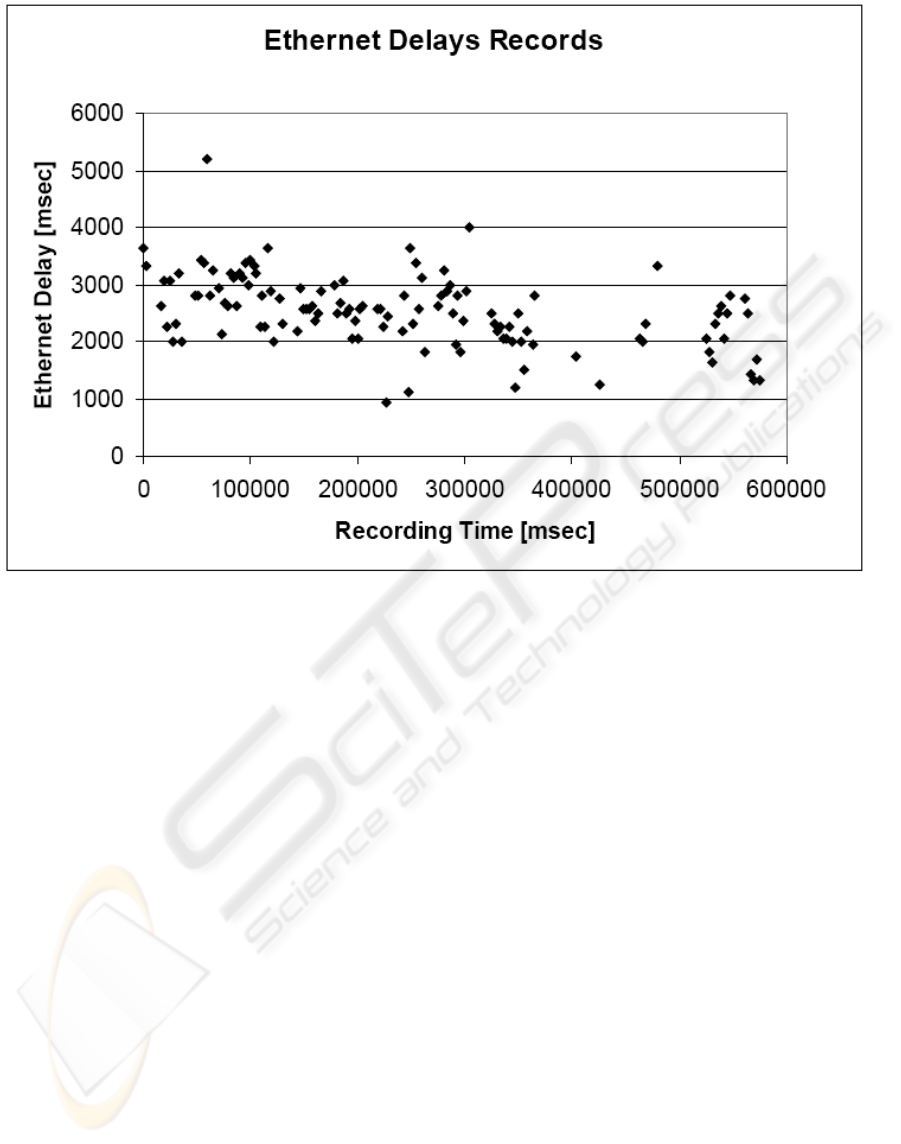
Figure 2: The experimental results of recording Ethernet Delays over around 10 minutes on the analyzed network.
availability of each possible plate destination
stations (of each Robotic Cell).
The proposed solution requires the Routing
System to move the CMS cell data hand-off point
(the point where it is transmitting the Routing Data
to CMS) more upstream the conveyor.
The CMS has to receive the Routing Data
message of a plate before the Vision Systems ends
the process of analyzing that plate (even on the
highest Ethernet traffic). But the method is not
anymore affected by receiving Routing Data in
advance. CMS will build a buffer of all the Routing
Data received from the RCS describing plates will
come in time, and it will be able to recover the
consistency in time of these data on the merging
process with the Vision Data.
5 CONCLUSIONS
The paper presented an algorithm developed at
protocol level, in order to guarantee the recovering
of data transfer consistency in time, at CMS level,
for merging of the data provided from RCS over an
Ethernet communication channel with the data
provided by the Vision System over a deterministic
communication channel.
This solution proposed in this paper is based on the
following assumptions:
- The actual slippage of the clocks on either
the RCS or the CMS processors would be very
minimal. This assumption is not a restrictive
one, being normal to accumulate a significant
slippage value around one second in much more
that days or even weeks.
- In the time the slippage value of the clocks
would become significant, the network
connection would have a period of relative low
traffic. This assumption is also not restrictive
one, because in those days or weeks that the
slippage value of the clocks is becoming
significant, it is more likely a relative calm
moment to occur in the net traffic.
- The number of collected messages
transmitted by the producer/received by the
consumer (till the slippage of the CPU clocks
will accumulate a significant value) will be
large enough to build a statistical population.
This assumption is also not a restrictive one
because the statistical population main support
is the “Request Status Message” which is set to
TEMPORAL MATCH OF MULTIPLE SOURCE DATA IN AN ETHERNET BASED INDUSTRIAL ENVIRONMENT
143

be transmitted every half second (most of the
statistical population members are coming from
collecting the estimated offsets for this type of
message).
REFERENCES
Mackay S., Wright E., Reynders D., Park J., 2003,
Practical Industrial Data Networks, Elsevier.
Marshall P.S., Rinaldi J.S., 2004, Industrial Ethernet (2
nd
Edition), ISA – The Instrumentation, Systems, and
Automation Society.
Stenerson J., 2002, Industrial Automation and Process
Control, Prentice Hal.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
144
