
A HIERARCHICAL SPATIAL INDEX FOR TRIANGULATED
SURFACES
Leila De Floriani, Marianna Facinoli, Paola Magillo and Debora Dimitri
Department of Computer and Information Science, University of Genova, Genova, Italy
Keywords:
Terrain models, Triangle meshes, Hierarchical spatial indexes.
Abstract:
We present the PM2-Triangle quadtree (PM2T-quadtree), a new hierarchical spatial index for triangle meshes
which has been designed for performing spatial queries on triangle-based terrain models. The PM2T-quadtree
is based on a recursive space decomposition into square blocks. Here, we propose a highly compact data
structure encoding a PM2T-quadtree, which decouples the spatial indexing structure from the combinatorial
description of the mesh. We compare the PM2T-quadtree against other spatial indexes by considering the
structure of the underlying domain subdivision, the storage costs of their data structures and the performance
in geometric queries.
1 INTRODUCTION
A terrain is a scalar field z = f (x,y) defined on a do-
main D. Function f is known only at a finite set
of data points. When the data points are irregularly
spaced in the x-y plane, the terrain is approximated
through a triangulated surface, called a Triangular Ir-
regular Network (TIN). A TIN consists of a decom-
position of the domain in the x-y plane as a triangle
mesh connecting the data points, and of a piecewise-
linear interpolant defined on the triangles of the mesh.
The triangle mesh underlying a TIN is usually en-
coded in a topological data structure, such as, for in-
stance, the indexed data structure with adjacencies
(De Floriani and Hui, 2007). This is well suited for
navigation in the mesh through adjacencies, but it be-
comes quite inefficient for spatial queries, such as
point location or window query, which involve focus-
ing on a portion of the domain. Since current mod-
els have a large number of triangles, of the order of
several millions, it is necessary to superimpose a spa-
tial index on the triangle mesh to expedite the search.
An approach for point location without a spatial index
(M
¨
ucke et al., 1999) is only possible for Delaunay tri-
angulations and convex domains.
There is a vast literature on both object-based or
space-based hierarchical spatial indexes, see (Samet,
2006) for a survey. Object-based indexes, such as
R-trees or their variants, are hierarchies of bounding
boxes (or sometimes spheres), and thus are not de-
signed for encoding connectivity of a set of entities,
like a polygonal map or a triangle mesh. The most
common space-based spatial indexes are quadtrees
and kD trees. Some of them have been defined for
sets of points or for polygonal maps (e.g., the PM-
quadtrees), but the subdivision is based on the edges
of the map, and the topological structure of the map
is not encoded.
We propose here a new hierarchical spatial in-
dex based on triangles, that we call a PM2-Triangle
quadtree (or PM2T-quadtree for short), and we
present a compact data structure for it. Such data
structure separately encodes the combinatorial struc-
ture of the triangle mesh, which is the basis for mesh
navigation, and the structure of the spatial index, that
enhances the performances of spatial queries by re-
ducing the searching space.
The remainder of this paper is organized as fol-
lows. In Section 2 we present related works. In
Sections 3 we define the PM2T-quadtree and its data
structure. In Section 4 we show that the PM2T-
quadtree outperforms a number of alternative spatial
indexes. Finally, Section 5 contains some concluding
remarks.
2 RELATED WORK
In this Section, we briefly review space-based hierar-
chical spatial indexes related to the new indexes pre-
sented here.
Quadtrees and kD-trees are spatial indexes for rep-
resenting a set of points. We describe here only a
86
De Floriani L., Facinoli M., Magillo P. and Dimitri D. (2008).
A HIERARCHICAL SPATIAL INDEX FOR TRIANGULATED SURFACES.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 86-91
DOI: 10.5220/0001097300860091
Copyright
c
SciTePress
quadtree for representing points in the plane, the PR-
quadtree (Orenstein, 1982). A PR-quadtree is gen-
erated by the recursive subdivision of the square do-
main, where the points are distributed, into nested
square blocks split through the middle point of the
block. The subdivision is described through a qua-
ternary tree, where every node is either a leaf, or an
internal node with four children corresponding to the
four sub-quadrants of its parent’s square. The shape
of a PR-quadtree is independent of the order in which
the points are inserted, since the subdivision is based
on the domain and the points are only in the leaves.
Several quadtrees have been proposed to store col-
lection of edges, see (Samet, 2006) for a detailed
treatment. The class of PM-quadtrees extend the PR-
quadtree to represent polygonal maps, by using sub-
division rules based on vertices and edges. The PMR
quadtree handles a collection of edges in the plane,
not necessarily forming a polygonal map, and uses a
probabilistic splitting rule. All such indexes maintain
a list of edges in the leaf blocks, but they do not en-
code the topological structure of the map. Thus, they
are good for searching in space but not for topological
navigation. The PM2-Triangle quadtree defined here
is a triangle-based extension of an index in the class
of PM-quadtrees, namely the PM2-quadtree.
The K-structure (Kirkpatrick, 1983) is a spatial in-
dex for triangle meshes, developed in computational
geometry with the purpose of performing point loca-
tion in a triangle mesh in worst-case logarithmic time
in the number of vertices. Unlike the PR- and PM-
quadtrees, the K-structure organizes the data to be
stored and not the embedding space. It consists of
a hierarchy of triangle meshes of logarithmic height
described as a directed acyclic graph. The hierarchy
is computed by starting from the given mesh and re-
peatedly eliminating an independent set of vertices of
low degree. Compared with the PM-quadtree, the
K-structure has a better worst-case behavior, but it
is more complex to implement and update (Samet,
2006).
3 THE PM2-TRIANGLE
QUADTREE
3.1 Space Subdivision
A PM2-Triangle quadtree (or PM2T-quadtree) is a hi-
erarchical spatial index for triangle meshes. As all
quadtrees, it recursively divides a square domain con-
taining the data into four blocks of the same size,
and the resulting nested subdivision is described as
a quaternary tree. The PM2-Triangle quadtree has a
triangle-based subdivision rule. The blocks of the fi-
nal subdivision, i.e., the leaves of the tree, must satisfy
the following four validity conditions:
1. A leaf block may contain at most one vertex.
2. If a leaf block contains one vertex v, it intersects
only the triangles incident in v.
3. If a leaf block b does not contain any vertex, the
triangles intersecting b are all incident in an exter-
nal common vertex.
4. Leaf blocks are maximal (i.e., no four sibling
leaves can be merged into a valid leaf).
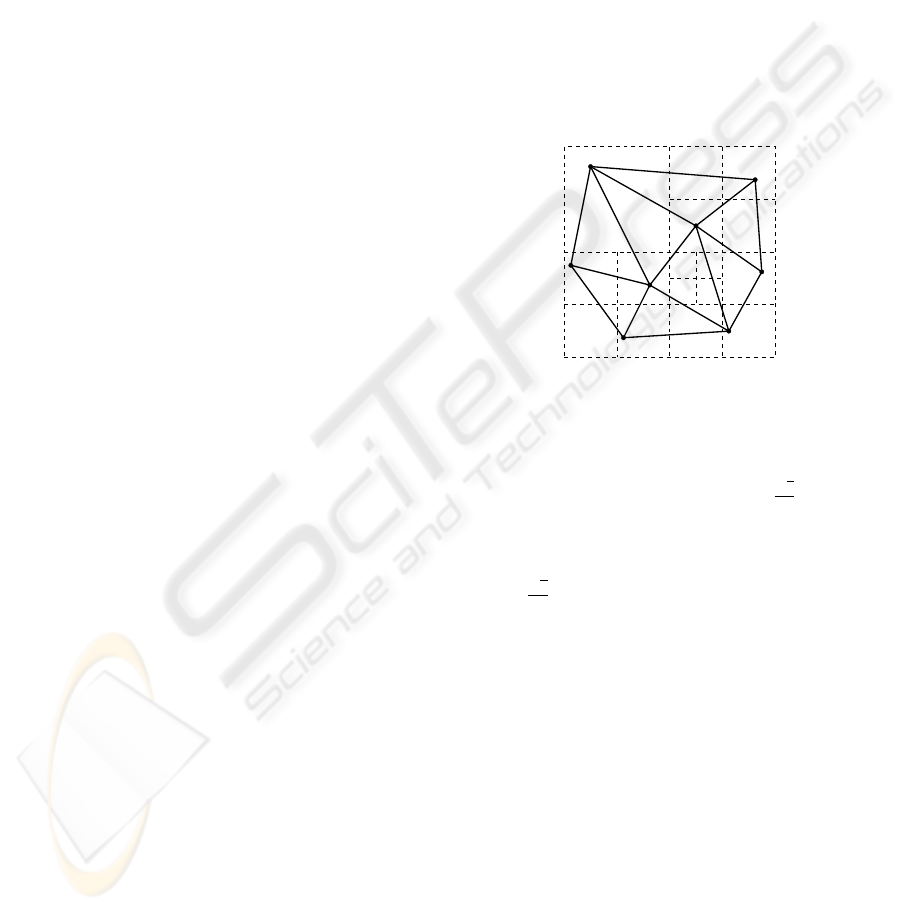
Figure 1 shows a PM2T-quadtree for a mesh of
eight triangles.
Figure 1: An example of a PM2T-quadtree.
Each validity condition provides an upper bound
in the evaluation of the depth of the tree. Condition
1 gives an upper bound D
1
= 1 + log
2
√
2
d
1
, where d
1
is minimum distance between any two vertices. Con-
ditions 2 and 3 imply an upper bound that depends
on the shape of the triangles, being equal to D
2
=
1 + log
2
√
2
d
2
where d
2
is the minimum height of the
triangles in the mesh. Thus, the global upper bound
to the depth of the PM2T-quadtree is max(D
1
,D
2
).
Details can be found in (Facinoli et al., 2007).
3.2 Data Structure
We present a compact data structure for encoding the
PM2T-quadtree, which represents the combinatorial
structure of the triangle mesh and the structure of the
spatial index separately.
The combinatorial structure of the triangle mesh is
encoded through a triangle-based data structure, that
is the indexed data structure with adjacencies (De Flo-
riani and Hui, 2007). We encode the vertices and the
triangles of the mesh into a vertex array and a trian-
gle array, respectively. The index of the position in
the array is used to identify the triangle or the ver-
tex. The only geometrical information are the vertex
A HIERARCHICAL SPATIAL INDEX FOR TRIANGULATED SURFACES
87

coordinates and the vertex elevations. For each trian-
gle t, we encode the indexes of the three vertices of t
(Triangle-Vertex (TV) relation), and the indexes of the
three triangles adjacent to t along an edge (Triangle-
Triangle (TT) relation), ordered consistently with the
information in TV relation. For each vertex v, we en-
code the index in the triangle array of one of its inci-
dent triangles (partial Vertex-Triangle (VT) relation).
This is sufficient to retrieve all the triangles incident
in a vertex v, in time linear in their number.
For encoding the structure of the spatial index,
we do not explicitly represent the quaternary tree that
describes the PM2T-quadtree through all nodes and
their parent-child pointers, but we encode only the
leaf nodes and their location codes. The location code
(Gargantini, 1982) of a leaf n describes the position
of n in the tree by means of the root-to-leaf path tra-
versed to reach it. Thus, for every leaf node, we store
its location code and an integer number, which al-
lows distinguishing among different types of leaves,
as well as retrieving the information (vertex and tri-
angles) possibly associated with such leaf. We have
the following types of leaves:
• An empty leaf is identified by the value −1.
• For a leaf block intersected by three or more tri-
angles, sharing a vertex v (that can be internal or
external to the block), we store the index of v. Tri-
angles are not explicitly stored since they are re-
trieved by using topological relations.
• For a leaf containing one triangle t, we store
a negative even integer content = −2(t + 1),
from which we can retrieve the index of t as
−(content/2) −1.
• For a leaf containing two triangles t
1
and t
2
, we
store a negative odd integer content = −2(t
1
+
1) + 1, if this quantity is different from −1 (al-
ready denoting an empty leaf); otherwise, it is
equal to the result of the same expression with t
2
instead of t
1
. The two triangles can be retrieved
one as ((1−content)/2) −1, and the other one as
its adjacent triangle which intersects the leaf.
We denote with N the number of vertices of the
triangle mesh, with T the number of its triangles
and with L
N
the number of leaf nodes in the PM2T-
quadtree. We consider every base type element (in-
tegers and pointers) to have a unit cost. The cost of
encoding the vertex coordinates and elevation values,
and the partial VT relation is equal to 4N, while the
cost of encoding the triangle array, i.e., the TV and
TT relations is equal to 6T . Finally the cost of encod-
ing the tree structure is equal to 2L
N
. This leads to
4N + 6T +2L
N
stored information items.
Note that 4N + 6T is the space required for rep-
resenting just the triangle mesh in a triangle-based
data structure, while 2L
N
expresses the overhead of
the spatial index. From Euler formula, T ' 2N. From
our experiments, L
N
is about 6N on average for syn-
thetic data, and about 5N for real data (see Section
4). Thus, the additional memory needed by the spa-
tial index is from 63% to 75% the memory required
for storing the triangle mesh itself.
4 ANALYSIS
We compare the PM2T-quadtree with other two spa-
tial indexes: the PM2-quadtree (Samet, 2006) for
polygonal maps, which can be used for a triangle
mesh as well, and an extension of the PR-quadtree
to triangle meshes.
We evaluate the space subdivision generated by
the different spatial indexes, the storage costs of
the data structures, and the performance on spatial
queries. The main requirement for a spatial in-
dex is to perform spatial queries efficiently, while
a low overhead of the data structure is desirable as
an additional requirement. Experiments show that
the PM2T-quadtree outperforms the other considered
spatial indexes in queries, and the proposed data stuc-
ture makes it compact enough.
We present results on synthetic data (De-
launay triangle meshes built on randomly gen-
erated point sets) and on triangulated mod-
els from the AIM@SHAPE shape repository
(http://shapes.aim-at-shape.net/): City of
Rome (957,456 vertices, 1,914,867 triangles), and
Dolomites mountains (810,000 vertices, 1,619,963
triangles).
4.1 Other Spatial Indexes
The PM2-quadtree belongs to the class of PM-
quadtrees (Samet, 2006) developed for polygonal
maps. In a PM2-quadtree, a leaf block contains at
most one vertex. If a leaf block contains a vertex,
it may intersect only edges incident in such vertex.
If a leaf block contains no vertex, it may intersect
only edges that meet a common vertex exterior to the
block. Each leaf has a list of edges intersecting it.
A PM2-quadtree, applied to a triangle mesh, rep-
resents the edges and not the triangles. The data struc-
ture we have implemented for the PM2-quadtree is
slightly different from the one described in (Samet,
2006). The vertices and edges of the map are stored
in a vertex array and an edge array, respectively. For
each vertex, we store its coordinates and elevation
value, and, for each edge, we store the indexes of its
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
88
two endpoints. This latter is the only topological in-
formation encoded in the PM2-quadtree. Each leaf
block stores its location code, and the list of the edges
intersecting the leaf block. The storage cost of a PM2-
quadtree is equal to 3N + 2E + 2L
N
+ 2E
L
, where E
denotes the number of edges and E
L
the total length
of all edge lists. Note that the number of leaves L
N
is
greater here than in the PM2T-quadtree (as shown in
Section 4.2), moreover E
L
≥ E and, from Euler for-
mula, E ' 3N in the case of a triangle mesh.
We have developed in (Facinoli et al., 2007) the
PM3-Triangle quadtree, or PM3T-quadtree, as an ex-
tension of the PR-quadtree for triangle meshes. It is
basically a PR-quadtree built on the mesh vertices,
where, in addition, each leaf stores all triangles it in-
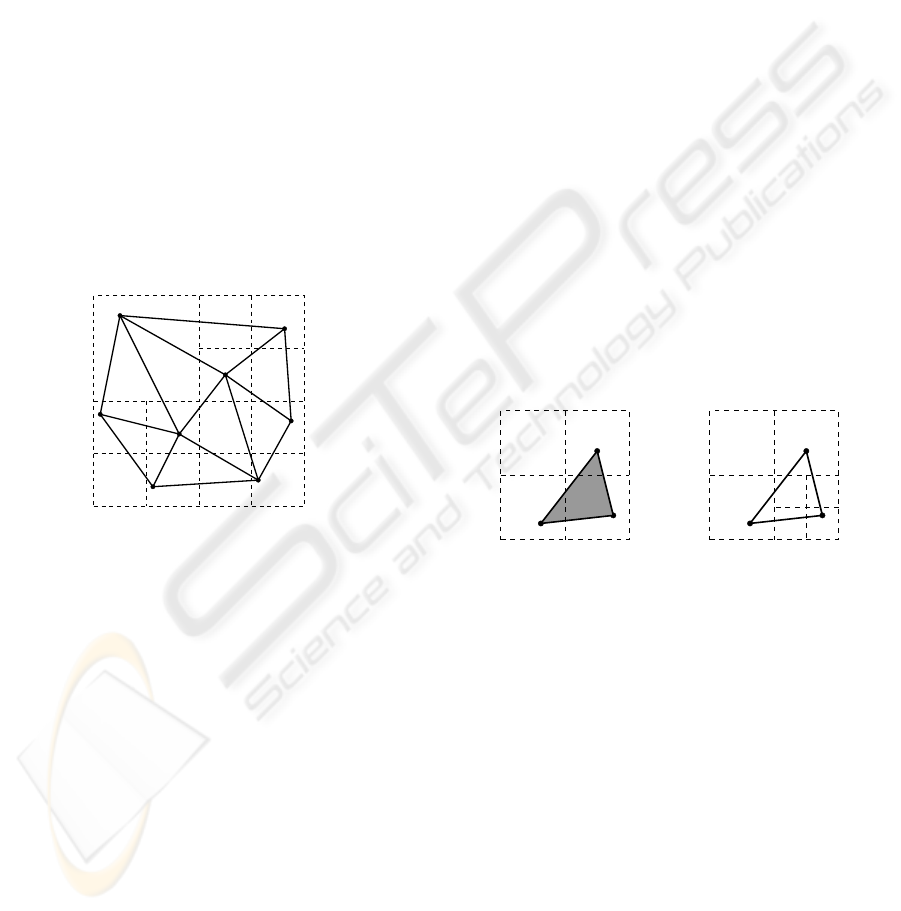
tersects. Figure 2 shows the PM3T-quadtree built on
the same triangle mesh used for the PM2T-quadtree in
Figure 1. The depth of a PM3T-quadtree is inversely
proportional to the minimum distance between two
vertices in the mesh since the subdivision criterion is
only based on the position of vertices.
Figure 2: Example of a PM3-Triangle quadtree.
Note that, in a PM2T-quadtree, all triangles inter-
secting a leaf block are incident in a common vertex,
while this is not true for a PM3T-quadtree. Thus,
we are not able to find all such triangles just from
the vertex, by using topological relations, as we did
in the PM2T-quadtree. Therefore, we need an ex-
plicit list of the triangles intersecting each leaf. The
data structure for the PM3T-quadtree stores, for each
non-empty leaf block, its location code, the vertex it
contains, and a list of the triangles that it intersects.
Vertices are encoded with their coordinates and el-
evations, while for each triangle only the Triangle-
Vertex (TV) relation is encoded, i.e., its three ver-
tex indexes. The storage cost of this data structure is
equal to 3 N + 3T + 3L
N
+ 2T
L
, where T
L
denotes the
total length of all triangle lists. Note that the number
of leaves L
N
of a PM3T-quadtree is lower than that
of a PM2T-quadtree (as shown in Section 4.2), while
T
L
≥ T ' 2N.
4.2 Structure of the Subdivision
We compare the domain subdivisions provided by the
PM2T-quadtree, the PM2 quadtree and the PM3T-
quadtree, on the same triangle mesh.
The domain subdivision induced by a PM2-
quadtree may be finer than the one induced by a
PM2T-quadtree. Consider a leaf block b with an as-
sociated vertex v. If b is intersected by the third edge
e of a triangle t incident in v, this causes a subdivi-
sion of b in the PM2-quadtree. On the contrary, the
PM2T-quadtree does not subdivide b because it con-
siders edge e as part of triangle t (see Figure 3). Note
that this situation can only happen near the bound-
ary of the domain of the triangle mesh. In the inte-
rior of the mesh, such a leaf node b would be subdi-
vided in the PM2T-quadtree as well, because of the
other triangle adjacent to t along edge e. On the other
hand, the subdivision induced by a PM2-quadtree
cannot be coarser than the one induced by a PM2T-
quadtree. The subdivision rule of the PM2T-quadtree
is a triangle-based version of the edge-based rule used
in the PM2-quadtree. Whenever the PM2T-quadtree
splits a block because of a triangle t intersecting it,
necessarily at least one edge of t intersects the same
block, thus splitting it in the PM2-quadtree as well
(see (Facinoli et al., 2007) for a complete proof).
v v
e e
(a) (b)
Figure 3: The PM2-quadtree (b) produces a finer subdivi-
sion than the PM2T-quadtree (a).
The subdivision induced by a PM2T-quadtree
is finer than the subdivision induced by a PM3T-
quadtree on the same triangle mesh (see Figures 1 and
2). This is due to the fact that, in a PM3T-quadtree,
the triangles associated with a leaf block do not nec-
essarily need to share a common vertex.
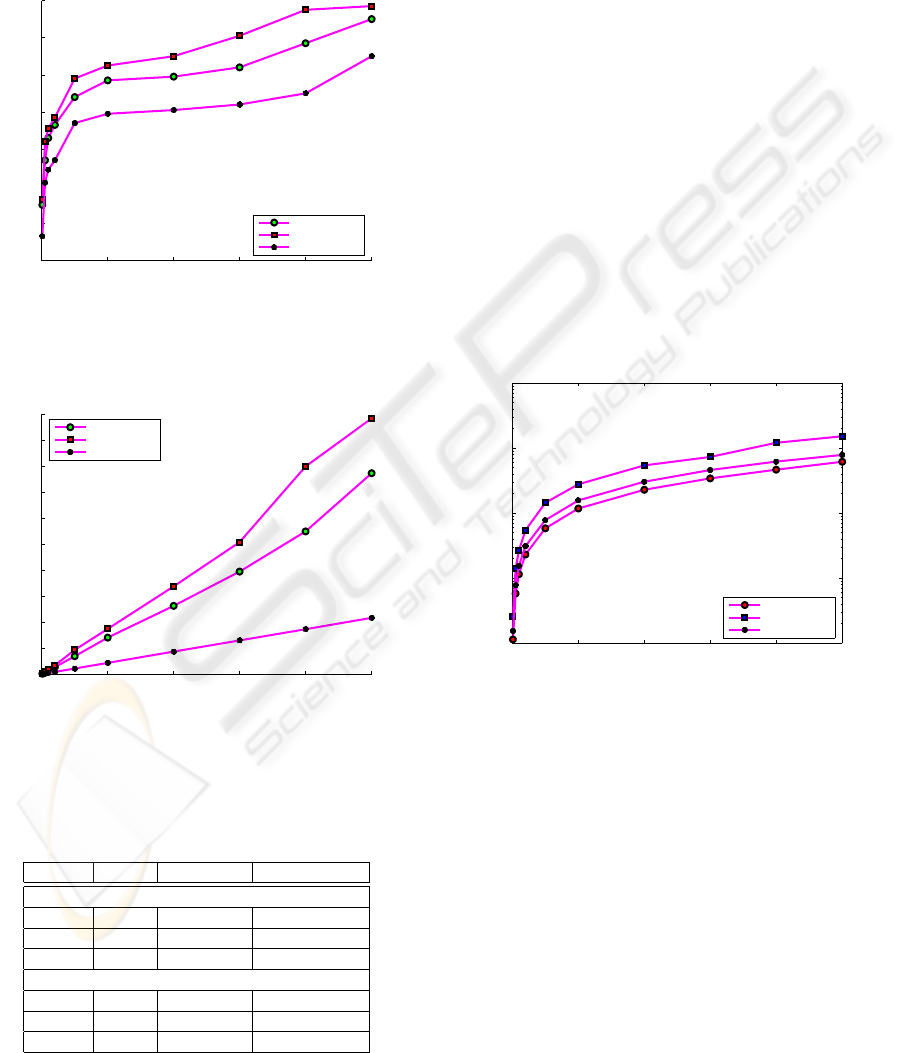
Figures 4 and 5 compare the depth and the num-
ber of leaf blocks in the three indexes, expressed as a
function of the number of the mesh vertices, for syn-
thetic data sets. Table 1 shows the results for real data.
The PM2-quadtree is at least as deep as the PM2T-
quadtree, and the number of its leaf blocks is about
25% more than in a PM2T-quadtree, on average. As
expected, a PM3T-quadtree is less deep than the other
two indexes and has fewer leaf blocks. In particular,
the PM3T-quadtree depth is about 90%, and its leaves
are about 30%, than in the PM2T-quadtree.
A HIERARCHICAL SPATIAL INDEX FOR TRIANGULATED SURFACES
89
On the other hand, our experiments in (Facinoli
et al., 2007) show that the number of triangles inter-
secting a leaf block are about 150% higher in a PM3T-
quadtree than in a PM2T-quadtree. This leads to
larger memory requirements for the PM3T-quadtree,
in spite of the coarser subdivision (see Section 4.3).
0 1 2 3 4 5
x 10
5
10
12
14
16
18
20
22
24
number of vertices
depth
PM2T quadtree
PM2 quadtree
PM3T quadtree
Figure 4: Depth of the tree on synthetic data.
0 1 2 3 4 5
x 10
5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10
6
number of vertices
number of leaves
PM2T quadtree
PM2 quadtree
PM3T quadtree
Figure 5: Number of leaf nodes on synthetic data.
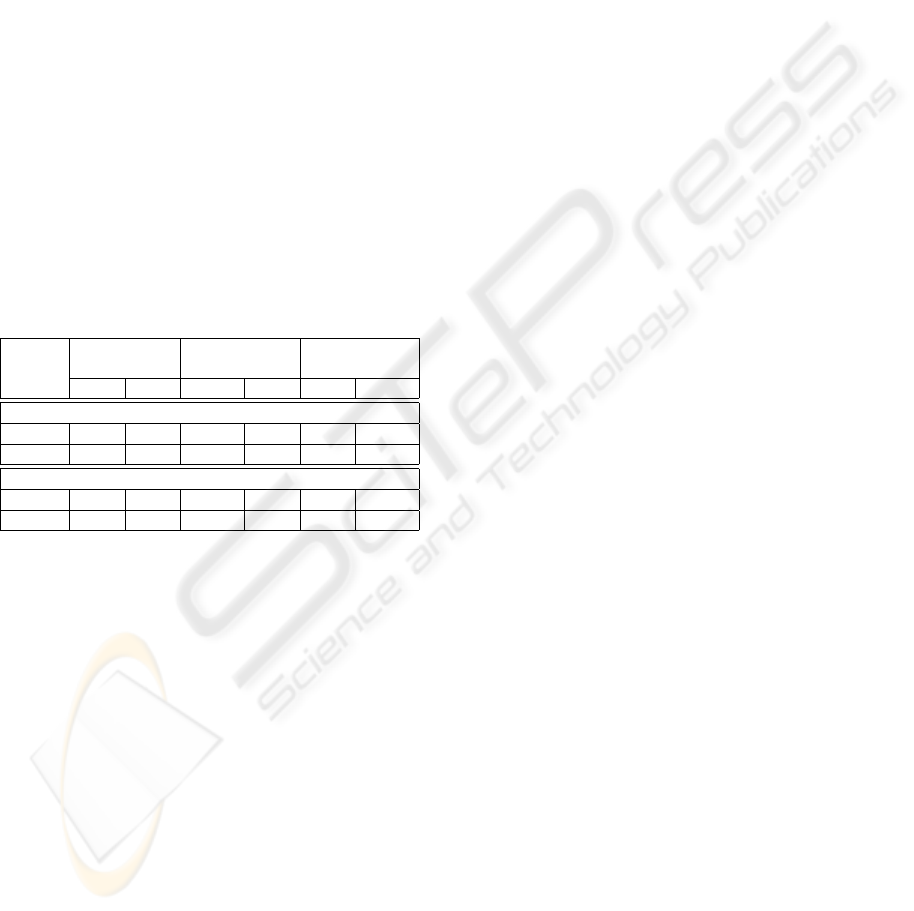
Table 1: Depth of the tree, number of leaf nodes, and stor-
age costs on real data.
index depth leaves storage (Mb)
Rome
PM2T 22 3,857,305 84.98
PM3T 12 1,397,315 95.56
PM2 12 3,895,022 166,72
Dolomites
PM2T 23 4,659,781 87.86
PM3T 12 1,146,715 116.96
PM2 13 4,707,102 237.58
4.3 Costs of the Data Structures
We consider here the space requirements of the data
structures for the PM2T-quadtree, the PM2-quadtree,
and the PM3T-quadtree.
Figure 6 compares the storage costs on synthetic
data. Results on real data are shown in Table 1.
The total cost of a PM2T-quadtree is about 3/4
than the total cost of a PM3T-quadtree. This happens
even if the domain subdivision in the PM2T-quadtree
is finer than in a PM3T-quadtree (see Subsection 4.2).
Our experiments in (Facinoli et al., 2007) have shown
that the cost of storing the leaf nodes in a PM2T-
quadtree is almost 1/3 than in a PM3T-quadtree, be-
cause the leaves of a PM2T-quadtree do not store any
triangle list.
The storage cost of the PM2T-quadtree is about
40% of that of the PM2-quadtree, because the lat-
ter has a finer domain subdivision, and furthermore
stores a list of edges in each leaf node. Our experi-
ments in (Facinoli et al., 2007) show that around 90%
of space in a PM2-quadtree is used for storing the leaf
nodes.
0 1 2 3 4 5
x 10
5
10
2
10
3
10
4
10
5
10
6
number of vertices
KB
storage costs
PM2T quadtree
PM2 quadtree
PM3T quadtree
Figure 6: Storage costs (in Kbytes) for synthetic data.
4.4 Performance in Queries
We consider here the two triangle-based indexes,
namely the PM2-Triangle quadtree and the PM3-
Triangle quadtree.
The basic geometric query we consider here is
point location, i.e., finding the triangle(s) of the mesh
containing a given query point.
Other common queries are the window query and
the range query, i.e., finding all the triangles inter-
sected by a rectangular or a circular area. Thanks
to the fact that a PM2T-quadtree represents the con-
nectivity of the mesh, such queries can be answered
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
90
by performing a point location for the centroid of
the query region, and then navigating the triangle
mesh through adjacency relations, until all other in-
volved triangles have been found. The cost is equal
to the cost of point location plus a number of point-
in-triangle tests linear in the number of reported trian-
gles.
The algorithm for point location query descends
the tree down to the leaf b containing the query point
p, and then performs a point-in-triangle test for each
triangle associated with b. To verify if a triangle con-
tains p, we need to test which if p defines a left or
right turn with the three edges of the triangle. If
the triangles form a fan, some triangle edges can be
skipped because already tested while processing the
previous triangle of the fan. The most time consum-
ing operation is computing a turn (since it involves
floating-point arithmetics).
Point location on a PM2-quadtree is more com-
plex since the triangles are not represented. It requires
finding the edges of the triangle containing the point,
which implies nearest neighbor computations.
Table 2: Results for the point location query on real data.
Visited Visited Computed
Triangles Nodes Turns
Index avg var avg var avg var
Rome
PM2T 1.60 0.30 11.3 4.9 4.80 0.70
PM3T 2.55 3.02 10.50 3.83 6.66 14.50
Dolomites
PM2T 2.0 0.72 11.90 0.10 4.8 2.5
PM3T 3.10 2.32 10.90 0.10 7.70 11.34
We consider the number of nodes visited in the
tree traversal, the number of triangles checked for in-
clusion and the number of turns computed (see Table
2). The upper bound to the number of visited nodes
is the depth of the tree (see Figure 4). The number
of visited triangles and the number of turns computed
depend on the number of triangles incident in the leaf
node containing the query point p.
The number of visited nodes is lower in the PM3T-
quadtree, since it has a lower depth. The number
of tested triangles and turn computations, as well as
their variances, are lower in the PM2T-quadtree. This
means that the PM2T-quadtree performs better, al-
though the tree is deeper, since turn computations
have a dominat cost. Specifically, a lower variance
implies that the worst case performs better.
5 CONCLUDING REMARKS
We have presented a new spatial index for triangle
meshes, called PM2-Triangle quadtree. We have de-
fined and implemented a compact representation for
a PM2T-quadtree based on the complete separation
of the combinatorial information on the triangle mesh
(needed to navigate in the mesh), and the structure of
the spatial index (used to reduce searching space in
queries). We have tested the efficiency of the PM2T-
quadtree through experiments.
Our current and future work is in spatial indexes
for tetrahedral meshes, for application to visualiza-
tion of 3D scalar fields and to finite element meshes.
The PM2-Triangle quadtree can be generalized into
a PM2-Tetrahedron octree, and a data structure for it
can be defined based on the same idea of separating
the structure of the mesh and the structure of the spa-
tial index.
REFERENCES
De Floriani, L. and Hui, A. (2007). Shape representations
based on cell and simplicial complexes. In State-of-
the-Art Report (STAR), Eurographics, Prague.
Facinoli, M., De Floriani, L., Dimitri, D., and Magillo,
P. (2007). The PM2-Triangle quadtree: a hierarchi-
cal spatial index for terrain modeling. Technical re-
port, Department of Computer and Information Sci-
ence, University of Genova (Italy).
Gargantini, I. (1982). An effective way to represent
quadtrees. Communications of the ACM, 25(12):905–
910.
Kirkpatrick, D. (1983). Optimal search in planar subdivi-
sions. SIAM Journal on Computing, 12(1):28–35.
M
¨
ucke, E., Saias, I., and Zhu, B. (1999). Fast random-
ized point location without preprocessing in two- and
three-dimensional delaunay triangulations. Computa-
tional Geometry, 12((1-2)):63–83.
Orenstein, J. A. (1982). Multidimensional tries used for
associative searching. Information Processing Letters,
14(4):150–157.
Samet, H. (2006). Foundations of Multi-Dimensional
and Metric Data Structures, chapter 1.4. Morgan-
Kaufmann.
A HIERARCHICAL SPATIAL INDEX FOR TRIANGULATED SURFACES
91
