
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE
DESIGN BASED ON 3D VISUALIZATION AND ONTOLOGIES
Lambros Makris, Nikolaos Karatzoulis, Dimitrios Tzovaras
Informatics & Telematics Institute, 1
st
km Thermi-Panorama, Thessaloniki, Greece
Evangelos Bekiaris
Hellenic Institute of Transport, 6
th
km Charilaou - Thermi, Thessaloniki, Greece
Keywords: DIYD system, Configurator, 3D Visualization, Ontologies.
Abstract: The customization level of vehicles is growing in order to deal with increasing user needs. Web browsers
are becoming the focal point of vehicle customization, forming personalized market places where users can
select and preview various setups. However the state of the art for the completion of the transaction is still
very much characterized by a face-to-face sales situation. Direct sales over the internet, without sales person
contacts, are still a small segment of the market, of only a few percent, for European manufacturers. This
paper presents an Intelligent DIY e-commerce system for vehicle design, based on 3D Visualization and
Ontologies that aims at enabling a suitable representation of products with the most realistic possible
visualization outcome in order to help prospective customers in their decision. The platform, designed for
the vehicle sector, includes all the practicable electronic commerce variants and its on-line product
configuration process is controlled by an ontology that was created using the OWL Web Ontology
Language.
1 INTRODUCTION
Automotive enterprises are becoming more
customer-centric to meet today’s challenging market
demands. This calls for restructured B2C relations
and related new technologies. The automotive
industry has furthermore become highly networked
and requires improved communication on products
and components in relation to its B2B relations.
Information and communications technology
(ICT) can be used to support business and design
activities. ICT does not change the fundamental
goals of any organisation but makes it possible to
optimize and coordinate design, manufacturing and
marketing. In the automotive industry, ICT can:
• Improve design procedures;
• Allow optimization of design, manufacturing
and marketing;
• Fine tune manufacturing processes;
• Provide the best product or service to current
and potential customers; and
• Respond rapidly to customers’ needs.
It has been envisioned that e-commerce and mass
customization will emerge as a primary style of
manufacturing in the coming decade and beyond.
The integration of design, manufacturing, and
logistics over the Internet will be the trend for the
factory of the future. Effective supply chain
management for mass customization will enhance
profitability through a synergy of increasing
customer-perceived value while reducing the costs
of design, production and distribution. Companies
successfully adapting to this new style of
manufacturing will be able to reduce reliance on the
traditional marketing channels, to gain more market
shares globally, and to achieve high-efficiency
product realization.
This technology can enhance the established
strengths of nowadays’ industries in global
manufacturing. It will benefit a wide variety of
industries such as electronics, machinery,
appliances, and logistics.
376
Makris L., Karatzoulis N., Tzovaras D. and Bekiaris E. (2008).
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE DESIGN BASED ON 3D VISUALIZATION AND ONTOLOGIES.
In Proceedings of the Third International Conference on Computer Graphics Theor y and Applications, pages 376-383
DOI: 10.5220/0001096103760383
Copyright
c
SciTePress
2 DIYD SYSTEMS AND THE
AUTOMOTIVE BUSINESS
DIYD (Do It Yourself Design) systems enable
companies to extend their markets anywhere,
anytime via the Internet. BMW, for example, sells
six out of ten cars to order. Although the order-to-
delivery time is very long, up to two months, much
longer than that for regular cars, customers are
prepared to wait (The Economist 2004). However
current systems usually only allow for a simple
selection of options and a visual presentation of the
result in the format of data sheets, tables and
photographs of the vehicle exteriors and/or interior.
The configuration system is not driven by customer
requirements. The user has to interpret to what
extent the various technical features will satisfy
his/her functional requirements and needs.
In order to support the user in his/her choices,
information should be presented in the most
comprehensible way. This can be accomplished by
offering the user detailed access to information using
reconfigurable electronic catalogues and presenting
the resulting configuration using 3D virtual
prototypes.
The use of 3D virtual prototypes in a virtual
environment can enhance visualisation and
perspective viewing of the designed car. Unlike 2D
graphics, users can interact via the web browser to
navigate around an object and to move and rotate it.
This type of Virtual Reality is much more flexible
than a static image and allows for an apparently
infinite number of different views on the vehicle. It
is characterized by the use of 3D computer models
presented on a 2D computer screen using 2D
interaction devices like a mouse. The use of such
interactive visuals has already undergone two cycles
of hype in the internet business. But it was not
successful due to overloaded solutions and
bandwidth problems of the internet. Recently the
technologies behind have gained momentum in the
European automotive industry in the field of Digital
Mock-ups (Döllner & Kellner 2000), which are used
very successfully in the development process
employing again the internet for both intranet and
B2B communication. Thus the time has come to
transfer this success to field of mass customization
and DIY design.
But Virtual Environments go beyond. Immersive
systems allow for a dynamic stereoscopic view on
the vehicle exterior and interior and add intuitive 3D
interaction by tracking technology to the user
interface. These sophisticated VR solutions are
currently used in vehicle design and development.
Internal projects in the automotive industry showed
that VR technology was still too expensive to be
used in customer communication and vehicle
configuration around 5 years ago. This was mainly
due to the use of expensive hardware. In the
meantime inexpensive VR systems on commodity
hardware basis have been developed in Europe, e.g.
within the VIEW project (Wilson & D’Cruz 2006).
These results can be further exploited to develop
appropriate VR systems for mass customization and
visualisation.
3 THE CATER SYSTEM
As already stated, current systems usually only
allow for a simple selections and 2D visual
presentation. We present an intelligent and user-
friendly e-commerce solution, namely CATER, by
adopting additional technologies such as a
configuration engine supported by ontologies,
advanced search mechanisms, and 3D visualisation
in a virtual reality environment. The focus of the
system is on the vehicle industrial sector; however
the intention is that the system will be suitable for
suppliers, and wholesalers, from other sectors, such
as furnishing, clothing etc.
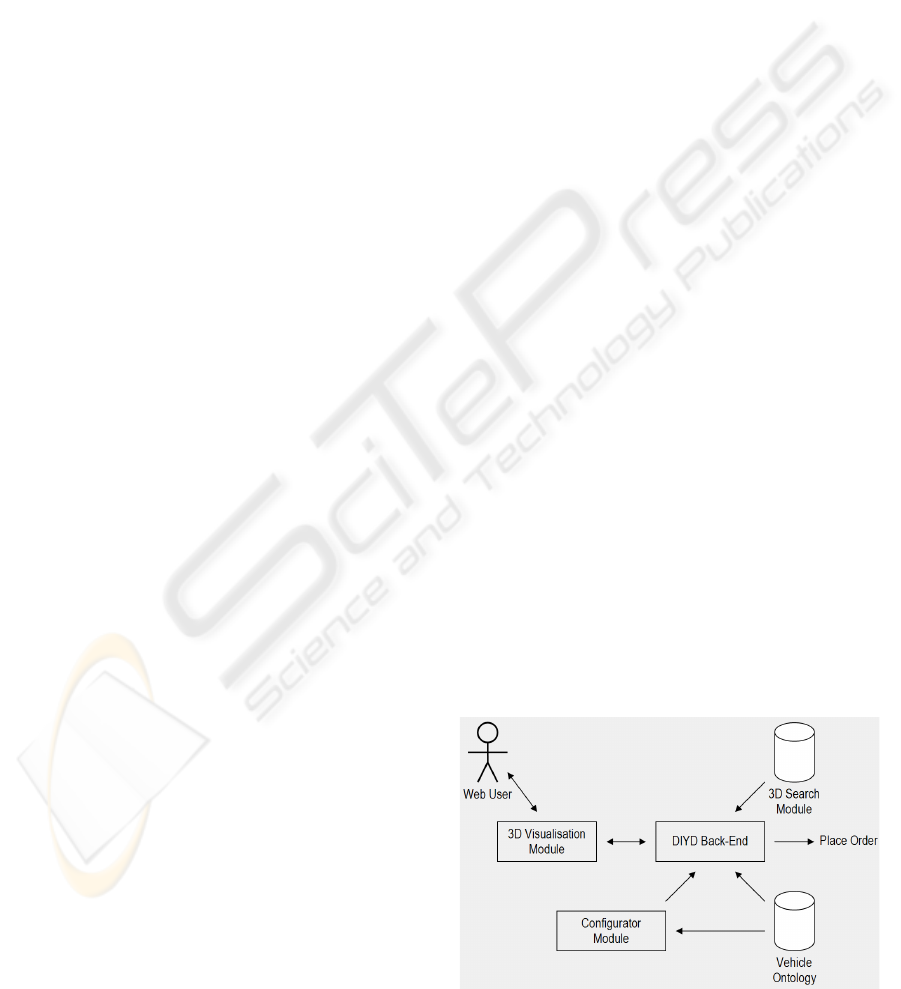
In our use scenario a customer is connected to
the CATER system using a traditional web browser.
He searches in the 3D object database, by example,
to find particular components that are of interest to
him. The system, using an ontology, prevents him
from selecting components which are incompatible.
At the same time the user can pose particular
constraints, such as maximum cost, which are
honoured by the system. He can then use a VR
interface to connect the components together and
form a design that suits him. The final selection can
then be saved or forwarded to the factory for
realization. Figure 1 presents the basic modules of
the CATER system architecture.
Figure 1: The main modules of the DIYD system.
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE DESIGN BASED ON 3D VISUALIZATION AND
ONTOLOGIES
377
3.1 Intelligent Configurator Module
and Ontology
The Intelligent Configurator module in CATER is a
web based application that allows the user to
assemble vehicles based on the available vehicle
parts that are being stored in the systems repository
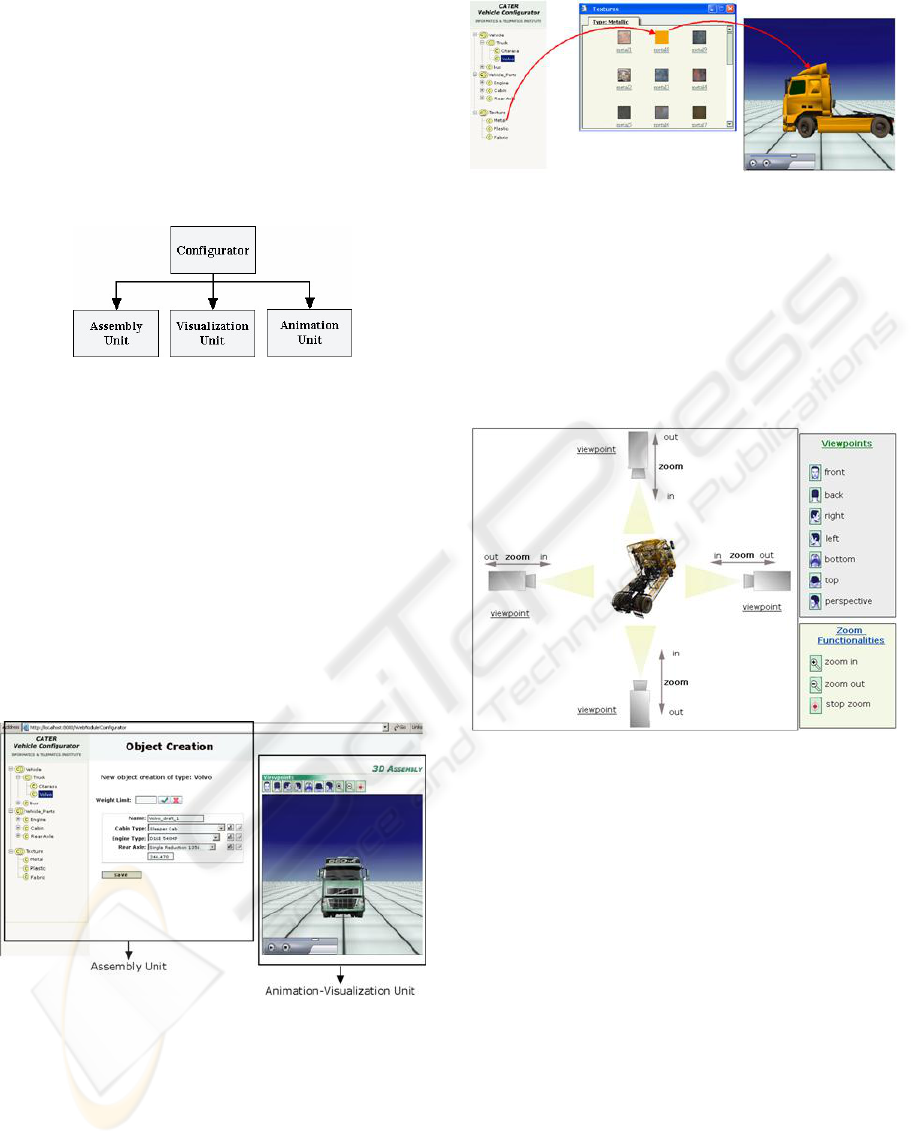
maintained by the vehicle manufacturer. Figure 2
displays the Units of the Configurator module.
Figure 2: The Units of the Configurator Module.
The Assembly Unit allows the user to insert
individual 3D objects to the scene that can consist of
a fully functional vehicle. The user can compose the
desired vehicle according to his/her needs by
selecting the vehicle’s parts. The vehicle part and the
texture selection processes are being controlled by
the restriction mechanisms that are generated from
the system Ontology (Kompatsiaris et al 2005,
Tsampoulatidis et al 2004, Mezaris et al 2003). The
main functionalities of the Assembly Unit are the
following: (i) Insertion of 3D object parts, (ii)
Selection of texture and (iii) Assembly process
based on dynamic constraints (e.g. weight).
Figure 3: The web interface of the Configurator.
Once the user has selected the preferred vehicle
parts then the selected parts are loaded to the 3D
scene and the user is allowed to modify the
colouring scheme of each selected part by activating
the textures menu option (Figure 4). The allowed
colouring scheme is defined in the CATER
ontology.
Figure 4: Modification of the colouring scheme of the
inserted 3D parts based on the CATER ontology.
The purpose of the Visualization Unit is to
record and store the 3D object assembly steps in
real-time. The assembly sequence is being stored in
the 3D animation repository for future reproduction.
The Visualization Unit allows the user to select
various viewpoints in order to preview the assembly
process from various viewing angles (Figure 5).
Figure 5: The viewpoints supported by the Visualization
Unit.
The Animation Unit allows the reproduction of
the vehicle parts assembly processes that are stored
in the animation system repository. In the Animation
Unit the user can control the viewpoints and the
playback of the loaded vehicle assembly process.
Animations can be prepared by the manufacturer to
enhance the user experience or to highlight
particular features of the vehicle. Animations can
also be useful in situations where the assembly order
is important for the customer to understand how a
particular set of parts work together. The web
interface of the Configurator Module is depicted in
Figure 3.
3.2 3D Visualisation Module
Virtual Reality (VR) interfaces can provide the most
realistic presentation of a configuration for end
users. It combines high quality visualization with the
correct perception of depth and scale, which enables
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
378
a feeling for the roominess of the interior of a car.
Additionally, a highly intuitive interface allows easy
manipulations of models, assemblies and parts.
Combined with simulations (e.g. physics or a man-
model), the models can be evaluated in terms of
packaging (fit of the components) of ergonomics.
The 3D Visualization Module of the CATER
system is realized on the Visualization and
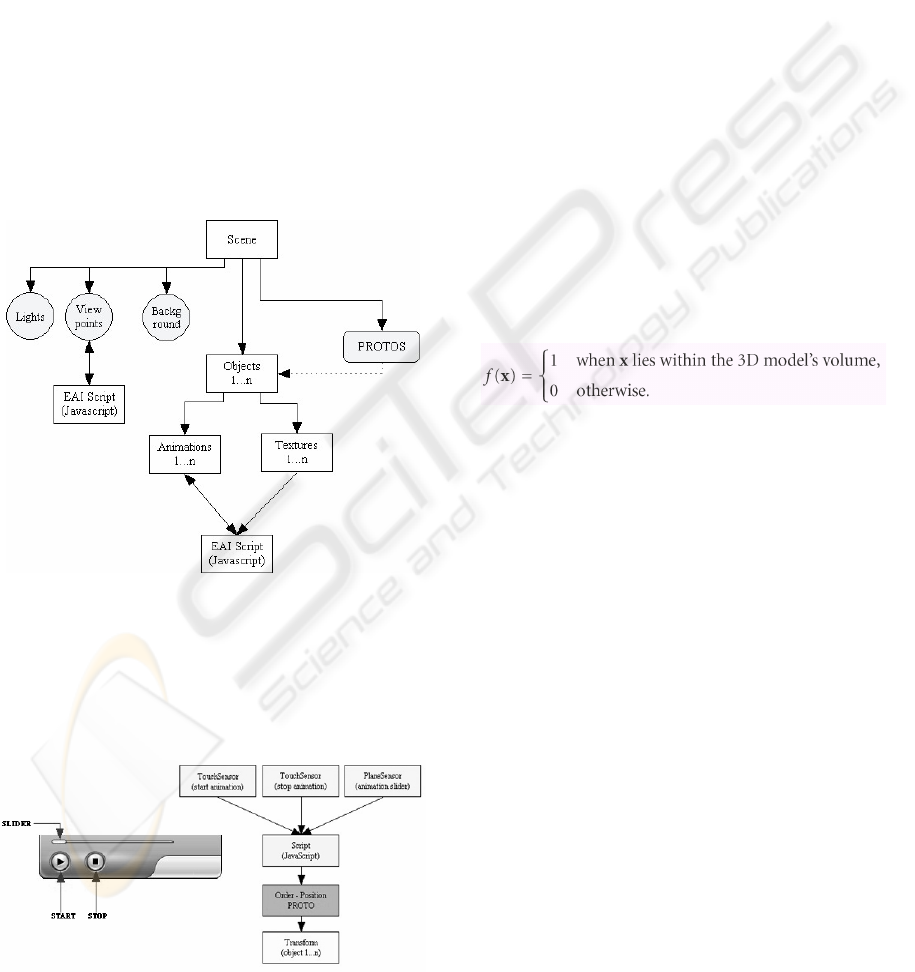
Animation Units. The structure of the individual 3D
scenes supported by the 3D Visualization Module
can be seen in Figure 6.
The 3D scene contains the viewpoints, the
lighting of the 3D world, the background, the 3D
objects and the object functionalities (interactions)
that are created dynamically according to the
ontology specifications. The user interaction with
the 3D scene is achieved by the use of predefined
VRML Protos. For every 3D object that is inserted
in the 3D scene an animation representing its
assembly process is dynamically generated.
Figure 6: The 3D scene structure of the 3D Visualization
Module.
The playback functionalities of the assembly
process are controlled by a panel (Figure 7) that was
developed using several VRML sensors
(TouchSensor & PlaneSensor).
Figure 7: The assembly process control.
3.3 3D Geometry Search Module
The 3D geometry search module utilizes novel
algorithms for low-level feature extraction from 3D
objects, based on geometric characteristics. The
algorithms are robust to affine transformations
(rotation, translation, scaling) and are applied to 3D
objects regardless of their degeneracies, formats and
levels of detail. This results in a more compact
representation of the objects, which uniquely
characterizes them. The 3D search module can be
used whenever the user wants to provide a specific
part of a vehicle as a query and retrieve similar
objects from the repository.
Every 3D object is described with a rotation,
scaling and translation invariant descriptor vector,
which is formed according to the Spherical Trace
Transform (STT) (Zarpalas at al 2007). Initially,
every object is translated and scaled so that all
objects are expressed in the same coordinate system.
To achieve the latter, a local coordinate system has
been defined centred to the centre of mass of the
object and scaled so that the object fits to the unit
sphere. Then, the object’s binary volumetric
function is computed
and the STT (Figure 8) is performed as follows:
• A set of radius segments is defined. Every
radius segment Λ
i
is formed by the
intersection of a radius (η
i
,ρ
j
) with the object.
• A set of spheres, concentric to the unit sphere is
defined.
• A set of plane segments is defined for every
sphere S
r
. Every plane segment Π
i
r
is formed
by the intersection of a plane tangent to the
sphere at point P
i
with the object.
The points P
i
and radii r
i
are uniformly
distributed on the sphere’s surface exploiting the
icosahedric-based tessellation.
Every Λ
i
segment is treated as a one-dimensional
signal and descriptors based on classical 1D Discrete
Fourier Transform and an integration transform are
computed. Every plane segment Π
i
r
is treated as a
2D signal and descriptors based on the Krawtchouk,
the Zernike and the Hu moments, the polar wavelet
transform and the 3D Radial Integration Transform
(Daras et al 2006) are computed. Then, the spherical
Fourier Transform is applied separately on every
extracted descriptor, so as the final descriptors are
invariant under rotation and, thus, appropriate for 3D
object matching.
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE DESIGN BASED ON 3D VISUALIZATION AND
ONTOLOGIES
379
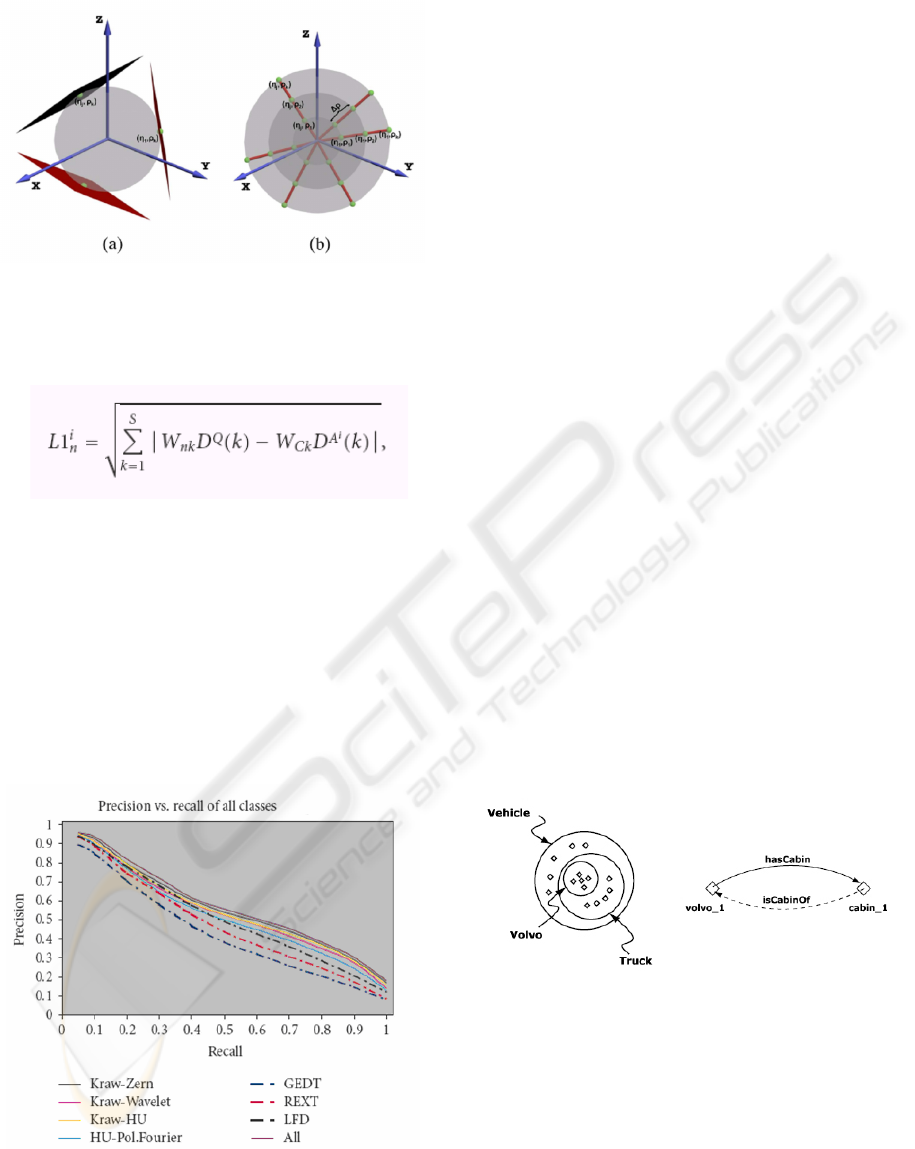
Figure 8: The Spherical Trace Transform.
The matching procedure is based on a mixture of
the weighted Minkowski L1 distance and the
normalized distance.
Equation 1: Weighted Minkowski L1 distance, where D
T
(k) is the k-th element of object.t T descriptor vector and
W
i
,T is the assigned weight
The computation of the weights for every single
descriptor is based on the statistical behaviour of
every descriptor for every class (e.g. mean value,
standard deviation, etc). Two different methods for
weight assignment have been proposed. The method
has been tested on the Princeton Shape Benchmark.
Figure 9 depicts the results in terms of precision and
recall diagrams.
Figure 9: Efficiency of the STT using combination of
different descriptors (Krawtchouk, Zernike, Hu etc).
3.4 Configurator Implementation
The Configurator Module is implemented using the
Java programming language. The system runs on
Apache Jakarta Tomcat as a Java Servlet and it is
based on the Jena framework, which is a Java
framework for building Semantic Web applications.
The ontology was created using the OWL Web
Ontology Language, and the Protégé OWL-Plugin.
The persistent store of the ontology is achieved
using the persistence subsystem of Jena, while the
3D visualization was developed using the VRML
standard and External Authoring Interface (EAI)
mechanisms.
The OWL-DL profile which was used in order to
create the ontology, is based on Description Logics.
Description Logics are a decidable fragment of First
Order Logic2 and are therefore amenable to
automated reasoning. It is therefore possible to
automatically compute the classification hierarchy
and check for inconsistencies in an ontology that
conforms to OWL-DL (Horridge et al 2004).
3.4.1 Specification of Classes
The classes in the Ontology are interpreted as sets
that contain individuals. They are described using
formal descriptions that state precisely the
requirements for membership of the class. For
example, the class “Vehicle” contains all the
individuals that are of type Vehicle in the CATER
domain. The taxonomy of the classes is being
achieved using the superclass-subclass model
hierarchy.
Class Model Object Type Property
Figure 10: Example of the class hierarchy of the class
“Vehicle” and an example of an Object Type Property for
the individual “volvo_1”.
3.4.2 Specification of Properties
There are two types of properties supported by our
ontology a) Data Type Properties and b) Object
Type Properties. These OWL Properties represent
relationships between two individuals.
In OWL, properties are used to create
restrictions. In our ontology the restrictions were
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
380
used to restrict the individuals that belong to a class.
We used the universal quantifier ∀ restrictions to
constrain the relationships along a given property to
individuals that are members of a specific class. For
example, the universal restriction ∀ hasCabin
cabin_1 describes the individuals all of whose
hasCabin relationships are members of the class
Cabin.
Table 1: List of the property restrictions applied to the
example class Volvo.
Class: Volvo
NECESSARILY
Truck
hasCabinEngineType
hasEngineType
hasRearAxle
accessType write
INHERITED
Root
owl:Thing
Vehicle
Cardinality restrictions were used to define the
order in which the individual object parts should
appear during the 3D assembly process (i.e. real-
time animation). The cardinality restrictions
provided the way to describe the class of individuals
that have at least, at most or exactly a specified
number of relationships with other individuals or
datatype values.
The hasValue restrictions, denoted by the
symbol ∋, were used to describe the set of
individuals that have at least one relationship along a
specified property to a specific individual. For
example, when we wanted to predefine the
dimensions of an individual object part we used a
hasValue restriction (dimensions ∋ “40-50-80”).
3.4.3 RDQL – Data Oriented Query Model
for the CATER Ontology
The CATER ontology uses an implementation of the
RDQL query language for quering RDF models
using the Jena API. RDQL provides a data-oriented
query model so that there is a more declarative
approach to complement the fine-grained,
procedural Jena API.
RDQL queries only the information held in the
models; there is no inference being done. The
RDQL system receives the description of what the
application requests, in the form of a query, and
returns that information, in the form of a set of
bindings.
RDQL is an implementation of the SquishQL
RDF query language, which itself is derived from
rdfDB. This class of query languages regards RDF
as triple data, without schema or ontology
information unless explicitly included in the RDF
source.
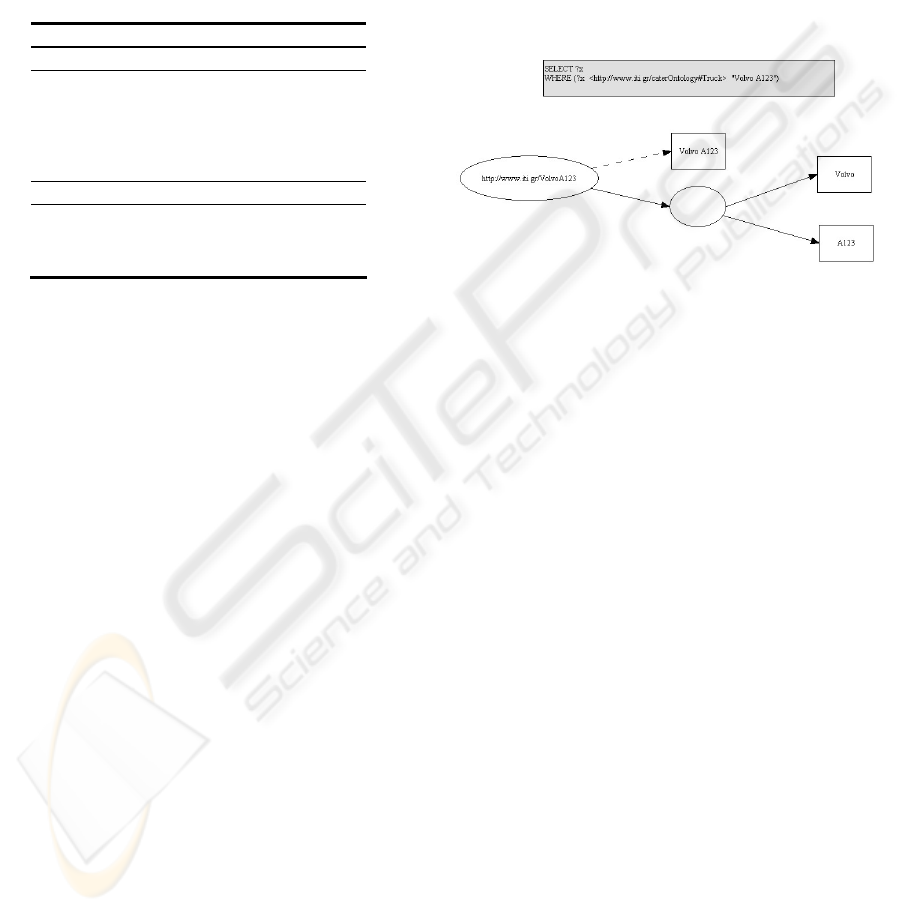
RDF provides a graph with directed edges - the
nodes are resources or literals. RDQL provides a
way of specifying a graph pattern that is matched
against the graph to yield a set of matches. It returns
a list of bindings - each binding is a set of name-
value pairs for the values of the variables. All
variables are bound (there is no disjunction in the
query).
Figure 11: Graphic representation of an example RDQL
query used for the CATER ontology.
3.5 The e-shopping Platform in
Practice
The use of the CATER platform “brings” advantages
for both suppliers and buyers regarding (i) the
cutback of transaction costs, (ii) the use of
automated supply procedures, (iii) economy of scale,
(iv) wide access on both local and international
markets, (v) dynamic real-time price
mechanisms/modules and (vi) the use of
compatible/expandable technologies.
The requirements of the described CATER
platform for vehicle products that together with the
Intelligent Configurator Module and the 3D
Visualisation Module comprises the advanced 3D
Shop system are:
• search and present all the available products,
based on multi-criteria search engines
• group products into multilevel categories (set
by the e-shop administrator)
• make offers/ sales and promote them
• update both the product catalogue and all items’
availability (set by the e-shop administrator)
• create/use shop baskets (by the end buyers)
• provide several convenient pay/receive methods
• provide a secure e-payment credit card
transaction (with the use of HTTPS and SSL
protocols).
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE DESIGN BASED ON 3D VISUALIZATION AND
ONTOLOGIES
381

However, the efficiency and overall quality of an
e-commerce service depends “heavily” on its
automatic connection with the existing ERP
(Enterprise Resource Planning) system for the
catalogue, prices, stock and product update. In order
to integrate all the available ERP data with the e-
shop database, a powerful staging mechanism is
developed and securely transfers all necessary data.
This staging process uses a smart “track changes”
algorithm, to enhance the update speed.
There are two staging processes, Real Time
Staging and Off Line Staging (that uses an
automated batch process). The characteristics of the
two staging “methods” are compared in the
following table.
Table 2: Staging Procedures comparison.
Real Time Staging Off Line Staging
Data
Update
(+) All data are
updated at all times
(-) All data are
updated at
specifically defined
time periods
Infra-
structure
(-) Reliable, high
speed, technical
infrastructure is
necessary, available
on a 24x7x365
basis
(+) Not so advanced
technical
infrastructure is
necessary
Security (-) The system can
be secure but
certain “protective”
actions must be
taken
(+) Security is
obvious
The previous table shows that a real time staging
procedure should be followed only if the nature of
the commodity traded imposes the constant database
update. In our case an every day off line procedure is
chosen for both security and convenience reasons.
Yet, if we try to deduct a general case example
we must notice that each company’s and product’s
needs, concerning the use of an e-market, are
different; therefore the connectivity solutions
(between an e-shop and an ERP) provided vary
depending on: (i) the ERP used (it can be a widely
used international ERP such as SAP, Oracle
Applications, etc. or it can be a custom made system
that fits to specific needs), (ii) the transaction
volume and the form of the data transferred, (iii) the
importance of the information transferred (regarding
time, safety etc. aspects), (iv) the use of unilateral or
bilateral communication and (v) whether it is an on-
line or a batch transfer of data.
E-commerce services offered through a B2C
(business to consumer) or B2B (business to
business) system, provide the necessary
infrastructure for real time e-business and an added
value package of services that guarantee faster and
more efficient buy and sell transactions, access to a
broadened database of buyers/suppliers and business
opportunities through the development of new
partnerships.
4 CONCLUSIONS
In conclusion, in this paper we presented an
interactive and user-friendly e commerce solution
for the vehicle sector, but appropriate for other
sectors as well. Volvo Technology Corporation
(VTEC) has been the end-user responsible for using
and testing the CATER platform, so a number of its
vehicles were integrated in the platform for
evaluation and testing purposes.
Finally, the main contribution is that our
approach adopts additional technologies such as a
configuration engine supported by ontologies,
advanced search mechanisms, and 3D visualisation
in a virtual reality environment aiming at enabling a
suitable representation of products in order to
achieve the most realistic possible visualization and
simulate an up to close shopping procedure.
ACKNOWLEDGEMENTS
We wish to acknowledge the CATER project
Consortium for their valuable contributions to this
work. The CATER project is partially funded by the
EC.
REFERENCES
The Economist, 2004. Research Tools Survey: Fighting
Back.
D. Döllner and G. Kellner, 2000. Digital Mock-up in
Rapid Prototyping in Automotive Product
Development. Journal of Integrated Design and
Process Science 4 (1), p. 56-66.
J. Wilson and M. D’Cruz, 2006. Virtual and interactive
environments for work of the future. International
Journal of Human-Computer Studies 64 (3), p. 158-
169.
I. Kompatsiaris, V. Mezaris, and M. G. Strintzis, 2005.
Multimedia content indexing and retrieval using an
object ontology, Multimedia Content and the Semantic
Web: Methods, Standards and Tools, G. Stamou and
S. Kollias (Eds), ISBN 0-470-85753-6, Wiley, p. 339-
371.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
382

I. Tsampoulatidis, G. Nikolakis, D. Tzovaras and M. G.
Strintzis, 2004. Ontology Based Interactive Graphic
Environment for Product Presentation, in Proc. CGI
2004, p.644 - 647, Heraklion, Crete, Greece.
V. Mezaris, I. Kompatsiaris, M. G. Strintzis, 2003. An
Ontology Approach to Object-Based Image Retrieval,
Proc. IEEE International Conference on Image
Processing (ICIP 2003), Barcelona, Spain, vol. II, p.
511-514.
D. Zarpalas, P. Daras, A. Axenopoulos, D. Tzovaras, and
M. G. Strintzis, 2007. 3D Model Search and Retrieval
Using the Spherical Trace Transform. EURASIP
Journal on Advances in Signal Processing, vol. 2007,
Article ID 23912
P. Daras, D. Zarpalas, D. Tzovaras, and M. G. Strintzis,
2006. Efficient 3-D model search and retrieval using
generalized 3-D radon transforms. IEEE Transactions
on Multimedia, 8(1), p. 101-114.
Apache Jakarta. Available at: http://jakarta.apache.org/.
Jena, A Semantic Web Framework for Java. Available at:
http://jena.sourceforge.net/.
The OWL Web Ontology Language. Available at:
http://www.w3.org/TR/owl-features/.
Protégé OWL Plugin. Available at:
http://protege.stanford.edu/plugins/owl/.
Web 3D Consortium, VRML Standard. Available at:
http://www.web3d.org/x3d/vrml/.
M. Horridge, H. Knublauch, A. Rector, R. Stevens, and C.
Wroe, 2004. A Practical Guide To Building OWL
Ontologies Using The Protégé-OWL Plugin and CO-
ODE Tools, Edition 1.0, The University of
Manchester.
A DIYD (DO IT YOURSELF DESIGN) SYSTEM FOR VEHICLE DESIGN BASED ON 3D VISUALIZATION AND
ONTOLOGIES
383
