
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL
WORLD GLOSSY SURFACES
Claus B. Madsen, Bjarne K. Mortensen and Jens R. Andersen
Computer Vision and Media Technology Lab, Aalborg University, Aalborg, Denmark
Keywords:
HDR, radiance, Image-Based Rendering, reflectance, real-time, non-isotropic textures.
Abstract:
A technique for real-time visualization of glossy surfaces is presented. The technique is aimed at recreating
the view-dependent appearance of glossy surfaces under some fixed illumination conditions. The visualized
surfaces can be actual real world surfaces or they can be surfaces for which the appearance is precomputed with
a global illumination renderer. The approach taken is to image to surface from a large number of viewpoints
distributed over the viewsphere. From these images the reflected radiance in different directions is sampled
and a parameterized model is fitted to these radiance samples. Two different models are explored: a very
low parameter model inspired by the Phong reflection model, and a general Spherical Harmonics model. It is
concluded that the Phong-based model is best suited for this type of application.
1 INTRODUCTION
The use of images as textures in computer graphics
is extremely common. These images, acquired with
a camera under controlled illumination, or syntheti-
cally generated (procedurally or manually), are typi-
cally/traditionally used to modulate the diffuse reflec-
tion of light from surfaces. Therefore albedo maps
could be a more proper term than the term texture
map normally used, (Yu et al., 1999). Increasingly
more visual realism is achieved by combining such
diffuse textures (appearance is independent on view-
ing direction) with a global glossiness term (for the
entire surface), normal maps, displacement maps, etc.
A special case application area for textures is
for image-based illumination of augmented objects
in Augmented Reality applications, (Debevec, 2005;
Madsen et al., 2003; Havran et al., 2005; Barsi et al.,
2005; Jensen et al., 2006; Madsen and Laursen, 2007;
Debevec, 1998; Debevec, 2002). Here, fully omni-
directional images of the environment are used for
determining the illumination conditions at the loca-
tion where the augmented object will be inserted into
the scene. These environment maps are acquired in
High Dynamic Range (HDR, where pixel values are
floating point numbers) in order to fully capture the
range of illumination in a real scene. Using omni-
directional environment maps have the clear disad-
vantage that the technique assumes that the surround-
ing scene is distant, i.e., that distances from the aug-
mented object to the surfaces of the rest of the scene
are large compared to the size of the augmented ob-
ject. Pasting the omni-directional environment map
onto a coarse model of the scene, (Gibson et al., 2003)
alleviates the distant scene assumption, but introduces
a new assumption (or problem): since the environ-
ment map was a acquired with a camera from a cer-
tain position in the scene it is assumed that the re-
flected light from the surfaces of the scene is view-
independent (diffuse reflectors). This poses a severe
problem in scenes containing windows and/or non-
isotropic light fixtures. For a survey of illumination
in mixed reality see (Jacobs and Loscos, 2004).
This paper addresses the general issue of explor-
ing techniques for view-dependent, glossy textures.
Our long term goal is to use such textures for improv-
ing illumination of augmented objects (as described
above). Our short term goal, as reported in the present
paper, is simply to develop techniques addressing the
following problem: How can we, by taking many im-
ages of a surface from a large number of viewpoints,
reconstruct, in real-time, the view-dependent appear-
ance of a glossy surface, faithfully recreating the illu-
mination conditions present during image acquisition.
We are thus not interested in being able to change
the illumination conditions, and therefore not inter-
ested in explicitly modelling reflectance functions
(BRDFs). Rather, we are interested in being able to
231
B. Madsen C., K. Mortensen B. and R. Andersen J. (2008).
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL WORLD GLOSSY SURFACES.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 231-240
DOI: 10.5220/0001095602310240
Copyright
c
SciTePress

synthesize novel views of real world glossy surfaces
in real-time. Figure 1 illustrates the type of results of
this work.
2 RELATED WORK
Clearly, this work falls within the field of Image-
Based Rendering, IBR. Overviews of the field can be
found in (Kang, 1997; Oliveira, 2002). Related work
can be grouped in three categories: 1) BRDFs esti-
mated from multiple images, 2) Light Fields, and 3)
View-Dependent Texture Maps.
Estimation of reflectance functions from images
has been formulated as inverse rendering, (Yu et al.,
1999; Boivin and Gagalowicz, 2001; Boivin and
Gagalowicz, 2002), where one or a small number
images of a surface are used to estimate the pa-
rameters of low-parameter BRDFs. The advantage
of such an approach is that the surface can subse-
quently be subjected to novel illumination conditions,
but the clear disadvantage is that the estimation pro-
cess requires knowledge of the light sources in the
scene. Conversely, the Bidirectional Texture Func-
tion, (Dana et al., 1997), represents a technique for
storing surface appearance indexed by viewing and
illumination directions. Similarly, there is a large
body of research into capturing reflectance maps, e.g.,
(McAllister et al., 2002; Lensch et al., 2003; Zick-
ler et al., 2005). By capturing BRDFs from system-
atic and controlled imaging under varying view direc-
tion and illumination direction enormous flexibility
is achieved and the appearance can subsequently be
reconstructed under arbitrary illumination conditions.
The disadvantage of this approach is that acquisition
requires sampling the illumination direction as well
as the viewing direction, which is impossible given
our long term goal of being able to capture the view-
dependent appearance of for instance a room under
totally normal illumination conditions.
Light Fields and Surface Light Fields (Levoy and
Hanrahan, 1996; Gortler et al., 1996; Miller et al.,
1998; Wood et al., 2000) represent techniques for
appearance reconstruction using more or less knowl-
edge about scene geometry. Appearance from novel
views is based on interpolation of acquired appear-
ances from sample viewing directions. These tech-
niques either impose limitations on the allowable set
of viewing directions for novel views, or require very
high quality geometric models of the scene. Fur-
thermore, the Surface Light Field approach is vertex
based and appearance reconstruction is a complicated
process ill suited for rendering using acceleration.
View-Dependent Texture maps (Debevec et al.,
1998) use geometric information to re-project input
images to any novel view, blending among the input
images based on considerations of view direction and
sampling rate to avoid aliasing. A disadvantage of
this technique is that is based simply on interpolation
on input images and does not represent any kind of
condensation of appearance samples into a compact
representation.
In the present paper we explore techniques for
compacting view-dependent appearance into a single
parametric representation per surface point, suitable
for accelerated (GPU-based) visualization in real-
time.
3 OVERVIEW OF APPROACH
The chosen approach is conceptually very simple. We
mount a particular surface, e.g., a poster or piece of
card board with various material samples glued onto
it, in a setup which allows for photographing the sur-
face from a large number of viewpoints distributed
across the upper hemisphere. Figure 1 demonstrates
an OpenGL application with special purpose pixel
shaders developed to reconstruct the view-dependent
appearance based on models fitted to the measure-
ments from the photographs of the surface.
In the example in figure 1 the surface was pho-
tographed from approximately 100 different view-
points keeping illumination conditions fixed. For ev-
ery point on the surface we therefore have 100 RGB
measurements of that point’s appearance from differ-
ent view directions. For every point we then fit a low-
parameter model to those 100 measurements. In the
demonstrated case we have used 10 parameters per
surface point. These parameters are stored in a texture
which is mapped to quadrilateral in an OpenGL based
application. A purpose-built pixel shader then recon-
structs the view-dependent appearance of the surface.
As seen, highlights move across the surface as the
view changes.
4 CAPTURING APPEARANCE
In order to model and reconstruct the appearance of
a surface as a function of viewing direction we need
to sample (measure) the appearance from a number
of viewing directions. Furthermore, since the ap-
pearance changes across the surface, e.g., due to tex-
ture, and changes in glossiness, we need to sample
the appearance at a large number of distinct locations
across the surface. This section describes how images
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
232

Figure 1: Three different views of a surface with different materials (in the foreground some duct tape, alu-foil and various
plastics). The view-dependent appearance of the surface is reconstructed in a pixel shader in real-time (60 fps) based on a
per-pixel appearance model fitted to data acquired from a large number of photos of the real surface.
are used in order to collect information about view-
dependent appearance changes for a given surface un-
der given illumination conditions.
The proper radiometricquantity to use for describ-
ing appearance is the outgoing radiance. Imaging
sensors, cameras and human eyes alike, produce re-
sponses that are proportional to the incident radiance
and the proportionality constant depends on the ge-
ometry of the sensor, (Dutr´e et al., 2003). Radiance
is a radiometric quantity measured inW/(m
2
· sr) and
describes the power leaving (or arriving at) a surface
point, per solid angle, and per projected area. Radi-
ance does not attenuate with distance and hence a cer-
tain surface looks (to a camera or to a human) equally
bright independent on the distance between the ob-
server and the surface, (provided that interaction with
participating media is disregarded).
4.1 Measuring Real Surface Radiances
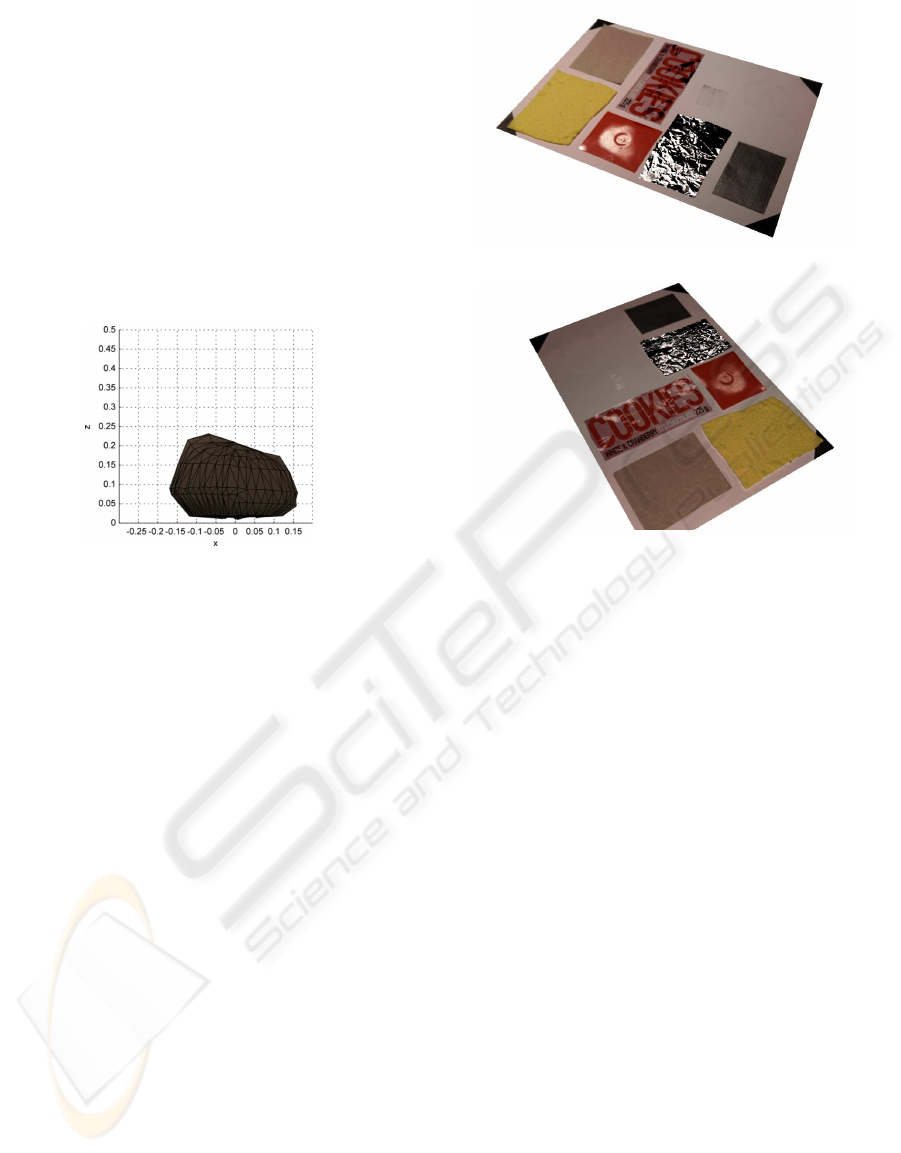
Figure 2: The setup used to acquire photographs of the sur-
face from a all directions. The surface sample and the light
source are mounted together on a setup which can pan and
tilt relative to a static camera on a tripod. For these con-
trolled experiments the light source is the only illumination
in the room.
A high quality digital camera is used to take im-
ages of a surface. Figure 2 shows images of a simple
setup used to acquire measurements of surface radi-
ance. To be able to properly represent the actual dy-
namic range in reflected radiance from real specular
surfaces we capture multiple images from each view-
ing position by varying the exposure. These multi-
ple exposures are fused into a single High Dynamic
Range (HDR) floating point image using the free soft-
ware tool HDRShop, (Debevec et al., 2007), which is
based on the techniques presented in (Debevec and
Malik, 1997). In this work we have not taken steps to
radiometrically calibrate the camera (Canon EOS 1Ds
MARK II 16 Mega pixel digital SLR fitted with a 28
- 135 mm zoom lens) we use for acquiring images of
real surfaces. Therefore the constant of proportion-
ality between HDR pixel value and reflected surface
radiance is unknown. We simply operate on the pixel
values directly in further processing, acknowledging
that there is an unknown scale factor. Nevertheless,
the pixel values will be referred to as measured radi-
ances, a radiance for each of the three color channels.
4.2 Surface Sample Points
A rectilinear sampling grid is imposed on the surface
patch. Figure 3 illustrates how the surface is sampled
at high density (typically 512x512 or 1024x1024). To
ensure that the sample points have the same location
on the surface for all viewpoints a camera calibration
process is run in order to compute the position and
orientation of the camera relative to the surface for
all views. When combined with an a priori internal
camera calibration of the lens and camera parameters
this allows for projecting world coordinate points (the
sample grid points) to the image plane. The black
squares at the corners of the surface patch in figure
3 are used to estimate camera position and orienta-
tion. A camera calibration toolbox for MATLAB has
been used, (Bouguet, 2007), which also exist as an
OpenCV toolbox for implementation in a C program,
(SourceForge.net, 2007).
Since the camera by no means is infinitely far
awayfrom the surface being imaged the direction vec-
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL WORLD GLOSSY SURFACES
233

(a) Resolution = 16x16.
(b) Resolution = 32x32.
Figure 3: Two different low sampling resolutions for illus-
trative purposes. In reality higher resolutions are required
to reconstruct text and detailed figures on the surface. The
black squares at the corners are used for calibrating the cam-
era position and orientation to the surface coordinate sys-
tem.
tor to the focal point of the camera is not the same for
all sample grid locations. That is, for a given image
the viewing direction for all the surface points is not
the same. Therefore, alongside with storing the RGB
radiances for a given surface point for a given image it
is also necessary to store the viewing direction which
the radiance measurement corresponds to.
4.3 Constructing an Observation Map
An Observation Map (OM) is a large multi-
dimensional texture. It contains all the information
accumulated from the sequence of images taken of the
surface. For a given surface point each image (each
viewpoint) produces three radiance values (RGB) and
two parameters describing the viewing direction in
spherical coordinates (the distance to the camera is ir-
relevant as radiance is independent on distance). The
OM thus contains S· T · N times five floating point val-
ues, where S and T give the resolution of the sampling
grid, and N is the number of viewpoints from which
the surface has been imaged.
The viewing directions (camera positions relative
to surface coordinate system) used are found by sub-
sampling an icosahedron in order to get uniformly
distributed positions across the upper hemisphere,
(Ballard and Brown, 1982). Between 100 to 300 di-
rections are used for the real surfaces shown in this
paper, which in reality is not quite enough for highly
glossy surfaces. Our rig for acquiring images (figure
2) is manual. An automated (motorized and control-
lable) rig would make acquisition much easier. Figure
4 shows the measured radiances for a specific sample
point on a surface.
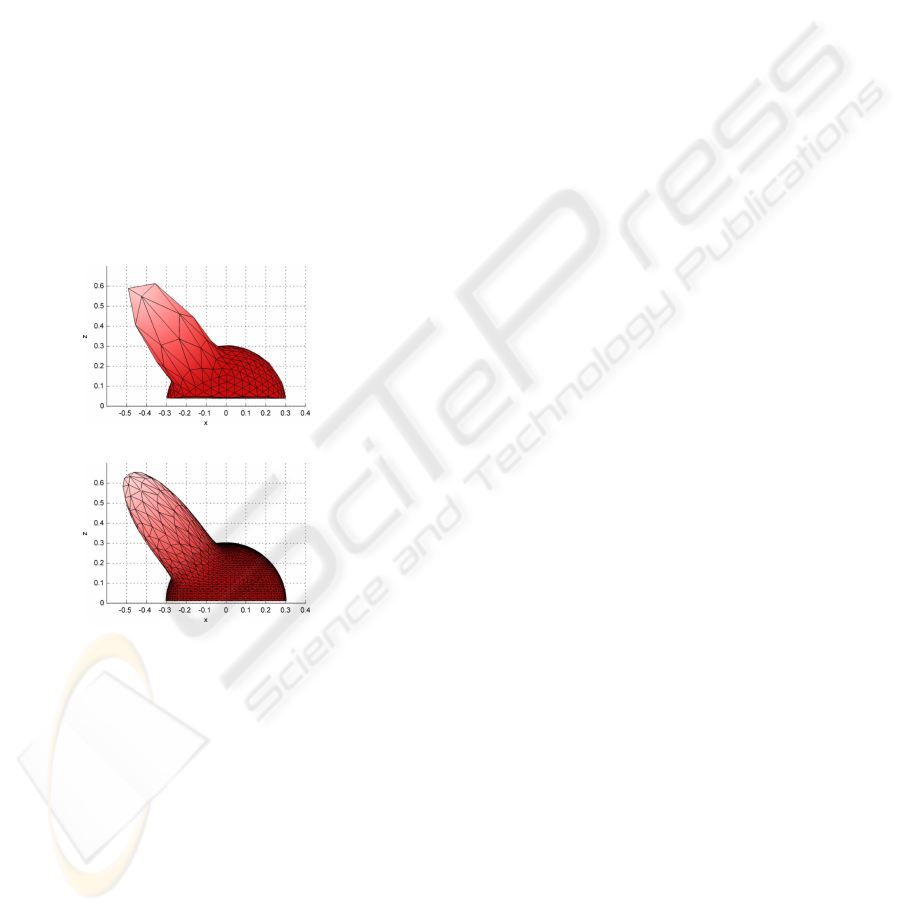
Figure 4: Measured radiance from 278 views of a point on
a glossy poster. Notice the clear highlight spike caused by
the single light source illuminating the surface during ac-
quisition. The colors in the figure correspond to the balance
between the measured RGB radiances, but since the high-
light is so strong most of the radiances appear black. This
figure illustrates the content of the Observation Map at each
surface sample point.
A brute force Image-Based Rendering approach
using the OM directly for subsequent real-time visu-
alization would involve creating a pixel shader which
used the view vector to interpolate between the ob-
served radiances for a given texel. Apart from being
cumbersome this has three obvious disadvantages: 1)
the number of observations may vary from surface to
surface complicating the shader code, 2) the observa-
tions per texel would have to be sorted some how in
order to make it possible to efficiently search for near-
est neighbors among the observation directions for a
given view vector, and 3) the shear size of the OM
is prohibitive (1.5 GByte for a 512x512 map, with
300 observation directions). Obviously, some kind of
compression is needed and in this work we have opted
for fitting a parameterized model to the measured ra-
diances in order to be able to reconstruct the radiation
diagram, an example of which was illustrated in fig-
ure 4. Section 5 addresses the modelling issue.
4.4 Synthesized Surface Radiances
Experimentally we have for this paper worked pri-
marily with trying to re-visualize real world surfaces
but all techniques are equally applicable to basing
the modelling process on synthesized surface radi-
ances computed with a Global Illumination solver,
for example a ray tracer/path tracer. It would be
quite straight forward to alter a path tracer to di-
rectly produce the OM data needed per surface point.
This would make it possible to visualize precom-
puted view-dependent global illumination effects in
real time.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
234

5 PARAMETRIC MODELLING
OF RADIANCES
We are trying to model the outgoing radiance distribu-
tion, e.g., figure 4, for a surface point as a function of
viewing direction. Depending on the surface material
properties and the illumination conditions of the en-
vironment this radiance distribution can be arbitrarily
complex. The worst case situation is a mirror surface
which reflects the environment and the outgoing radi-
ance from a point on the surface can thus change with
very high frequency as a function of view direction
change. Below we describe two models that can be
used to approximate the outgoing radiance distribu-
tion for surfaces with some degree of specularity. We
shall return briefly to the issue of frequency content
of the outgoing radiance distribution in section 5.3.
5.1 The Multiple Highlight Model
This model is inspired by the Phong reflection model,
although it should be kept in mind that this work does
not attempt to model reflection properties. We are try-
ing to model reflected radiance, which obviously is a
combination of reflection properties and illumination
conditions as typically formulated by the Rendering
Equation, (Jensen, 2001; Dutr´e et al., 2003).
The Multiple Highlight model (henceforththe MH
model) is inspired by the Phong reflection model in
the sense that it models the reflected radiance from
a material which can be described by the Phong
reflection model, and which is illuminated by N
point/directional light sources. The MH model can
be formulated as a combination of an ambient term
and a sum of highlight cosine lobes:
L(~v) = K
d
+
N
∑
i=1
K
si
·
~
d
i
·~v
m
(1)
Here L(~v) is the outgoing radiance in the view-
ing direction,~v. N is a number of highlights that the
model must encompass. K
d
is a view-independent,
“ambient”, term and can be represented with 3 pa-
rameters (one for each color channel). K
si
is a specu-
lar highlight “amplitude” for each of the N highlights.
Again, since there are three color channels, 3 parame-
ters are needed to represent each K
si
. The dot product
between
~
d
i
and~v (both vectors are assumed to be unit
length) modulates the specular highlight with the co-
sine of the angle between the viewing direction and a
main “highlight direction”,
~
d
i
. The width of this co-
sine lobe is controlled by raising the cosine to some
power, controlled by the shininess parameter, m. The
shininess is a characteristic of the surface and is there-
fore the same for all the N highlights, i.e., does not
depend on i. The highlight direction for the ith high-
light,
~
d
i
, can be parameterized by two spherical di-
rections, φ
i
and θ
i
. When fitting the MH model to
acquisition data we have opted to parameterize it by
its three cartesian coordinate components, though, in
order to have simpler expressions and less non-linear
behaviour. In total the MH model requires 3 (ambient
term), plus N times 6 (three for specular amplitude
plus three for highlight direction) plus 1 (shininess)
parameters, equalling 4+ N · 6 parameters.
A collection of cosine lobes somewhat similar to
eq. 1 were used in (Gibson et al., 2001) for mod-
elling non-isotropic radiation from virtual point light
sources, but in that work the exponent was a fixed
number not estimated during fitting.
The Phong reflection model is based on point or
directional light sources which in reality do not ex-
ist. Even the sun subtends a non-infinitesimal solid
angle as seen from the Earth (a 0.53 degree diameter
disc). The reflected radiance from a specular surface
modeled by a Phong reflection model and illuminated
by an area light source will exhibit a thicker highlight
lobe for a given shininess m than the same surface il-
luminated by a point light source. Therefore, by using
the Phong-like specular highlight term we are not de-
limiting ourselves from modelling highlights caused
by area light sources. The estimated shininess, m,
would just be smaller than the actual shininess of the
surface, in order to encompass the thicker highlight
lobe.
As stated the MH model requires 4+ N · 6 param-
eters, e.g., 10 to model one highlight, 16 to model
2 highlights. Each image (viewing direction) of a
surface point provides three radiance sample values
(one for each of the three color channels). There-
fore, at a minimum four viewing directions for each
point is needed to provide enough equations to solve
for a model with one highlight, and six directions are
needed to solve for two highlights. In practice many
more observations are needed to ensure a good model
fit the critical part being to ensure getting direction
samples that clearly describe the highlight(s).
Model fitting has been implemented in MATLAB
using the built-in lsqcurvefit function. This function
allows specification of validity ranges of the param-
eters to be estimated, in order to bound the search
space. K
d
and K
si
are constrained to the interval [0,1]
for all color channels, since the measured radiance
values are normalized to this range prior to perform-
ing the model fitting. The highlight direction vector,
~
d
i
, is constrained to the upper hemisphere, and the
shininess, m, must be larger than 1.
To ensure fast convergence it is important with
reasonable initial estimates for the parameters to be
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL WORLD GLOSSY SURFACES
235
fitted. Initial estimates for K
d
are set to the average of
all direction radiance samples. The initial estimates
for K
si
are set to zero, whereas the highlight direction
is initialized to the direction of the strongest radiance
sample. Shininess, m, is initialized to 10. Conver-
gence is obtained within 5 to 10 iterations for syn-
thetic data and within 10 to 20 iterations for real data.
Figure 5 shows results of fitting a 10 parameter
(one highlight) MH model to synthetically generated
radiance samples of a surface. Synthetic radiance
samples are generated in the following manner. A
square surface is modelled in Autodesk 3DS Max 8
and illuminated by a single, white point light source.
289 uniformly distributed viewpoints are generated
from the upper hemisphere of a subsampled icosahe-
dron and the surface is rendered from each of these
views. Using these images an observation map is gen-
erated as described in section 4.3, and the MH model
is fitted to each of the surface sample points in the ob-
servation map. Figure 5 concerns an arbitrarily cho-
sen sample point on the surface.
(a) Input radiances.
(b) Fitted MH model.
Figure 5: Top: 289 synthetically generated reflected radi-
ance samples uniformly distributed across the upper hemi-
sphere. Bottom: One-highlight MH model fitted to the sam-
ples. The mean percentage residuals are [0.94,2.34,2.34]
for R, G, and B, respectively.
5.2 The Spherical Harmonics Model
As an alternative to the MH model described above
we have also experimented with the much more gen-
eral Spherical Harmonics framework. Spherical Har-
monics (SH) comprise a linear set of basis function
which can be used to represent spherical functions,
similarly to how Fourier basis functions are used
describe normal N-dimensional functions. (Green,
2003) provides an excellent introduction to practical
use of SH based approaches. It is beyond the scope of
the present paper to give an exhaustive description of
the fundamentals of the SH approach. We shall focus
on the two important issues of 1) how to compute the
SH coefficients for a given data input, and 2) how to
handle the issue that the SH approach in principle as-
sumes signals that are periodical over the sphere and
the data we are fitting to are only valid for the upper
hemisphere.
In the continuous case the ith SH coefficient, c
i
, is
found by projecting the signal (the reflected radiance
distribution) onto the ith SH basis function, y
i
(θ,φ).
This in turn is done through convolution over the en-
tire sphere. In the present case we have a set of radi-
ance samples, L
k
, k = 1...K, where K is the number
of views stored in the OM for the given surface point.
These samples of the radiance distribution function
can be projected onto the SH basis vectors using nu-
merical integration:
c
i
≈
k=1
∑
K
L
k
· y
i
(θ
k
,φ
k
)A
k
(2)
where (θ
k
,φ
k
) are the spherical angles of the view-
ing direction of the kth sample point, and A
k
is the
solid angle subtended by the viewing direction (each
sample represents a certain potion of the sphere of di-
rections). These solid angles are computed by pro-
jecting all the viewing directions (on a unit sphere)
onto the plane, performing a Voronoi tessellation, and
computing the area of each Voronoi polygon. These
areas are in turned weighted by 1/cos(θ
k
) to compen-
sate for the projection onto the plane.
The other non-trivial issue concerns handling the
missing samples for the lower hemisphere. Several
different approaches have been tried: 1) only inte-
grating over the upper hemisphere (the Zero Hemi-
sphere, ZH, approach), (Sloan et al., 2002), 2) mir-
roring the upper hemisphere, (Westin et al., 1992),
and 3) the Least Squares Optimal Projection (LSOP)
method, (Sloan et al., 2003). Experimentally the
LSOP method performs better, confirming results in
(Sloan et al., 2003).
5.3 Discussion On Frequency Content
Both models can be made arbitrarily complex, and
can thus in principle be used to model the outgoing ra-
diance from a surface point even for mirror surfaces.
The cost is obviously an increase in the number of pa-
rameters. For there to be any “space savings”, or com-
pression factor, in modelling the radiance distribution
with a function, it must be reasonable to assume that
the radiance distribution is sufficiently smooth that it
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
236

can be faithfully represented by the chosen parameter-
ization. In the case of the Spherical Harmonics model
there is also an aliasing issue to consider if the num-
ber of SH coefficients is too small compared to the
frequency content of the radiance distribution.
In the experiments section (section 7) we demon-
strate that the SH model cannot faithfully model the
reflected radiance from a glossy poster even with 64
parameters, and this is for a case where only one
light source is illuminating the material. Obviously,
the more light sources the more highlights, which in
turn leads to a higher frequency content in the radi-
ance distribution. A 64 parameter (per color channel)
SH model for a 512x512 surface texture requires 192
MByte memory with no compression.
6 REAL-TIME VISUALIZATION
A demonstrator system has been implemented in C++
using OpenGL. A multi-dimensional texture contain-
ing the parameters estimated for the chosen model
(beit the MH model or the SH model) is mapped to
a surface through uv coordinates. Using the mouse
the user can rotate the surface using a world-in-hand
scheme combined with moving toward or away from
the surface. In a vertex program the viewing direction
is computed and transformed to tangent space. This
viewing direction is interpolated over the surface and
passed to a fragment shader.
The fragment shader depends on the chosen
model. Assuming that the number of parameters used
for the given model is passed to the shader there is
no significant overhead in implementing the shader
generally enough that it can encompass an arbitrary
number of parameters. It is quite straight forward to
reconstruct reflected radiance given viewing direction
for both models, especially for the MH model, where
the reconstruction expression is given by equation 1.
For the SH model reconstruction is found by comput-
ing the values of all the basis functions in the given
viewing direction and finding the dot product with the
coefficient vector:
L(~v) ≈
n
2
−1
∑
i=0
c
i
y
i
(~v) (3)
where n is the number of bands used. An SH
model with 64 parameters encompasses 8 bands, 0
through 7. In our implementation the y
i
(~v) values
are computed directly in the shader instead of storing
them in high resolution tables and interpolating.
The fragment shader performs all computations in
floating point, and as a result the reconstructed ra-
diance for a given fragment is floating point. Prior
to display the radiance values are tone-mapped to
LDR 8 bit RGB brightness values as brightness =
1 − exp(−γ · L(~v)), where γ is an interactively ad-
justable exposure value.
7 EXPERIMENTAL RESULTS
The described techniques have been implemented and
tested on a single processor 2.2 GHz AMD athlon 64
machine with 3 GByte RAM. The computer is run-
ning 32 bit Windows XP (emulating 32 bit). The
graphics card is an NVIDIA GeForce 6800 series
card. On this machine the visualization application
is running at 60 fps (limited to refresh rate) with a
10 parameter MH model, and 20 and 10 fps with a
36 and a 64 parameter (per color) SH model, respec-
tively. There is much room for improvement on effi-
ciency of the shader code.
(a) 10 parameter MH model
(b) 3x64 parameter SH model
Figure 6: A glossy poster reconstructed using the MH and
the SH models, respectively. The MH models highlights
much better, but has problems with the white areas on the
poster. See text for explanation.
Figure 6 compares the visual performance of the
MH and SH models. At first glance the SH model
performs much more pleasing, since the MH model
appears to give a very spotty result. In reality the SH
model basically fails to represent the highlight areas.
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL WORLD GLOSSY SURFACES
237
The 64 parameter SH projection simply cannot handle
the narrow highlight lobe correctly. On the other hand
the MH model (the simple Phong inspired model) ac-
tually recreates the highlights very accurately, only
there are some areas where it does not catch them
(large regions of the white part of the poster). The
problem does not lie in the MH model, though. When
inspecting the data in the Observation Map (OM), it is
seen that in the white areas the highlight lobe is sim-
ply so narrow that it is not captured from any view-
point. Figure 7 shows the OM data for a sample point
in a white poster area.
Figure 7: For most of the white area on the poster the high-
light is not captured in the radiance samples and conse-
quently does not appear in the subsequent visual reconstruc-
tion. Compare to figure 4 which illustrates a sample point
in one of the few white poster areas where the highlight ac-
tually is properly captured.
Two lessons are learned immediately from this: 1)
roughly 300 viewpoint samples distributed over the
viewsphere is not enough to provide good samples
for a material such as a glossy poster, and 2) the SH
model requires more than 64 parameters to represent
highlights from such a material.
Another experimental result is illustrated in fig-
ure 8. When looking at the yellow cloth in the fore-
ground it is seen that the visual reconstruction method
is capable of handlingeffects that are usually achieved
through displacement mapping. More specifically the
depth discontinuity along the edges of the yellow
cloth correctly exhibits occlusion/dis-occlusion and
shadows appear and vanish consistently with a visual
interpretation of a non-planar surface.
More generally the demonstrated approach
with modelling and reconstructing appearance
embeds illumination, reflectance, normal, and depth-
discontinuity information into a single compact
representation. The advantage being that it can
represent and reconstruct all these phenomena, and
the disadvantage being that it is just an appearance
model, which does allow for a change in any of the
embedded information.
(a) View 1
(b) View 2
Figure 8: Two different reconstructed views of a surface
with multiple materials. Notice the correct handling of the
displacement and shadow at the edges of the thick yellow
cloth material in the foreground.
8 DISCUSSIONS AND FUTURE
WORK
This work has explored the possibilities for creating
non-diffuse textures which can be reconstructed (vi-
sualized) in real-time based on direction to the viewer.
With the current size of GPU memory it is clear
that the parameter maps used to represent these non-
diffuse textures must be as economical as possible in
their memory requirements. As described a 10 pa-
rameter (one highlight) MH model for a 512x512 tex-
ture requires 10 MBytes. A three highlight MH map
requires 22 MBytes. In comparison a 64 parameter
(per color channel) SH map of the same resolution re-
quires a staggering 192 MBytes.
We therefore believethe MH model to be the more
viable approach. In addition the MH model captures
the nature of highlights from a real glossy surface bet-
ter than the SH model (given that it is unrealistic to in-
crease the number of SH parameters). It could be said
that the MH model in this context is a more “model-
based model” than the SH model, which is completely
general. The drawback of the MH model is that it is
necessary to a priori determine how many highlight
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
238

to include when fitting the model to data. We have
successfully fitted two-highlight MH models to data
(not reported in this paper), and we have fitted one-
highlight models to data with two highlights. In the
latter case, if highlights are close (on the hemisphere)
the resulting fit is a broad, soft highlight. If the high-
lights are further apart the smaller of the two high-
lights is basically ignored in the fit. An important area
for future research is to explore robust techniques for
fitting the MH model to general data with no a priori
knowledge, e.g., by gradually increasing the number
of highlights until the optimal fit is achieved.
Another approach to combating the memory re-
quirements of the parameter maps is to switch from
a texel-based to a vertex-based approach. For some
applications (when surfaces are not highly textured) it
may be sufficient to store radiance distribution models
per vertex in a high resolution mesh, and then perhaps
use SH models with higher number of parameters.
As hinted in section 1 we also wish to continue
this work in a direction where the view-dependent
textures are used for illuminating augmented objects
in Augmented Reality applications. We are exploring
the use of an Irradiance Volume, (Greger et al., 1998),
approach, where the Irradiance Volume is computed
in real-time based on the view-dependent textures.
This would alleviate the assumption that the envi-
ronment is infinitely distant, an assumption typically
made when using image-based approaches to illumi-
nation in Augmented Reality, (Debevec, 2005; Mad-
sen et al., 2003; Havran et al., 2005; Cohen and De-
bevec, 2001; Barsi et al., 2005).
9 CONCLUSIONS
It has been demonstrated that it is possible to model
real-world glossy surface appearance with a low pa-
rameter model fitted to measured reflected radiance
sampled over the viewsphere. The parameters of the
fitted models are stored in texture maps which are
used by pixel shaders for hardware accelerated real-
time visualization.
Two different modelling schemes have been com-
pared, one being a specific highlight model (the Mul-
tiple Highlight model) inspired by the Phong reflec-
tion model, and the other being the completely gen-
eral Spherical Harmonics framework. Experiments
demonstratedthat the MH model is the only viable ap-
proach due to the fact that the SH models require too
many coefficients to faithfully represent highlights
from glossy materials, resulting in parameter textures
that cannot fit into contemporary texture memory.
It was also seen that the number of view sam-
ples needs to be very high (several hundreds) in order
to properly capture highlights if uniform sampling is
used.
The advantage of the approach is that photo-
realistic appearance of a real-world glossy surface
can be achieved, which compresses the combined ef-
fects of illumination, reflectance, surface normal and
moderate height differences into a single appearance
model which can be reconstructed in real-time.
ACKNOWLEDGEMENTS
This research is funded by the CoSPE project (26-04-
0171) under the Danish Research Agency.
REFERENCES
Ballard, D. H. and Brown, C. M. (1982). Computer Vision.
Prentice-Hall.
Barsi, A., Szirmay-Kalos, L., and Sz´ecsi, L. (2005). Image-
based illumination on the gpu. Machine Graphics and
Vision, 14(2):159 – 169.
Boivin, S. and Gagalowicz, A. (2001). Image-based render-
ing of diffuse, specular and glossy surfaces from a sin-
gle image. In Proceedings: ACM SIGGRAPH 2001,
Computer Graphics Proceedings, Annual Conference
Series, pages 107–116.
Boivin, S. and Gagalowicz, A. (2002). Inverse rendering
from a single image. In Proceedings: First European
Conference on Color in Graphics, Images and Vision,
Poitiers, France, pages 268–277.
Bouguet, J.-Y. (2007). Camera Calibration Toolbox for
Matlab, www.vision.caltech.edu/bouguetj/calib doc/.
Cohen, J. M. and Debevec, P. (2001). The Light-
Gen HDRShop plugin. www.hdrshop.com/main-
pages/plugins.html.
Dana, K. J., van Ginneken, B., Nayar, S. K., and Koen-
derink, J. J. (1997). Reflectance and texture of real-
world surfaces. IEEE Conference on Computer Vision
and Pattern Recognition.
Debevec, P. (1998). Rendering synthetic objects into real
scenes: Bridging traditional and image-based graph-
ics with global illumination and high dynamic range
photography. In Proceedings: SIGGRAPH 1998, Or-
lando, Florida, USA.
Debevec, P. (2002). Tutorial: Image-based lighting. IEEE
Computer Graphics and Applications, pages 26 – 34.
Debevec, P. (2005). A median cut algorithm for light probe
sampling. In Proceedings: SIGGRAPH 2005, Los An-
geles, California, USA. Poster abstract.
Debevec, P. and Malik, J. (1997). Recovering high dynamic
range radiance maps from photographs. In Proceed-
ings: SIGGRAPH 1997, Los Angeles, CA, USA.
REAL-TIME VIEW-DEPENDENT VISUALIZATION OF REAL WORLD GLOSSY SURFACES
239

Debevec, P. E., Borshukov, G., and Yu, Y. (1998). Efficient
view-dependent image-based rendering with projec-
tive texture-mapping. In 9th Eurographics Rendering
Workshop,.
Debevec et al., P. (2007). www.hdrshop.com.
Dutr´e, P., Bekaert, P., and Bala, K. (2003). Advanced
Global Illumination. A. K. Peters.
Gibson, S., Cook, J., Howard, T., and Hubbold, R. (2003).
Rapic shadow generation in real-world lighting envi-
ronments. In Proceedings: EuroGraphics Symposium
on Rendering, Leuwen, Belgium.
Gibson, S., Howard, T., and Hubbold, R. (2001). Flexi-
ble image/based photometric reonstruction using vir-
tual light sources. In Chalmers, A. and Rhyne, T.-M.,
editors, Proceedings: Annual Conference of the Eu-
ropean Association for Computer Graphics, EURO-
GRAPHICS 2001, Manchester, United Kingdom.
Gortler, S. J., Grzeszczuk, R., Szeliski, R., and Cohen,
M. F. (1996). The lumigraph. In SIGGRAPH ’96:
Proceedings of the 23rd annual conference on Com-
puter graphics and interactive techniques, pages 43–
54, New York, NY, USA. ACM Press.
Green, R. (2003). Spherical harmonic lighting: The gritty
details. Technical report, Sony Computer Entertain-
ment America.
Greger, G., Shirley, P., Hubbard, P. M., and Greenberg,
D. P. (1998). The irradiance volume. IEEE Computer
Graphics and Applications, 18(2):32–43.
Havran, V., Smyk, M., Krawczyk, G., Myszkowski, K., and
Seidel, H.-P. (2005). Importance Sampling for Video
Environment Maps. In Bala, K. and Dutr´e, P., editors,
Eurographics Symposium on Rendering 2005, pages
31–42,311, Konstanz, Germany. ACM SIGGRAPH.
Jacobs, K. and Loscos, C. (2004). State of the art report on
classification of illumination methods for mixed real-
ity. In EUROGRAPHICS, Grenoble, France.
Jensen, H. W. (2001). Realistic Image Synthesis Using Pho-
ton Mapping. A. K. Peters.
Jensen, T., Andersen, M., and Madsen, C. B. (2006). Real-
time image-based lighting for outdoor augmented re-
ality under dynamically changing illumination condi-
tions. In Proceedings: International Conference on
Graphics Theory and Applications, Set´ubal, Portugal,
pages 364–371.
Kang, S. B. (1997). A survey of image-based rendering
techniques. Tehcnical report series CRL 97/4, Cam-
bridge Research Laboratory, Digital Equipment Cor-
poration, One Kendall Square, Building 700, Cam-
bridge, Massachusetts 02139.
Lensch, H. P. A., Kautz, J., Goesele, M., Heidrich, W., and
Seidel, H.-P. (2003). Image-based reconstruction of
spatial appearance and geometric detail. ACM Trans-
actions on Graphics, 22(2):234–257.
Levoy, M. and Hanrahan, P. (1996). Light field render-
ing. In SIGGRAPH ’96: Proceedings of the 23rd an-
nual conference on Computer graphics and interac-
tive techniques, pages 31–42, New York, NY, USA.
ACM Press.
Madsen, C. B. and Laursen, R. (2007). A scalable gpu-
based approach to shading and shadowing for photo-
realistic real-time augmented reality. In Proceedings:
International Conference on Graphics Theory and Ap-
plications, Barcelona, Spain, pages 252 – 261.
Madsen, C. B., Sørensen, M. K. D., and Vittrup, M. (2003).
Estimating positions and radiances of a small num-
ber of light sources for real-time image-based lighting.
In Proceedings: EUROGRAPHICS 2003, Granada,
Spain, pages 37 – 44.
McAllister, D. K., Lastra, A. A., and Heidrich, W. (2002).
Efficient rendering of spatial bi-directional reflectance
distribution functions. In Graphics Hardware 2002,
pages 79–88.
Miller, G. S. P., Rubin, S. M., and Ponceleon, D. B. (1998).
Lazy decompression of surface light fields for pre-
computed global illumination. In Rendering Tech-
niques, pages 281–292.
Oliveira, M. M. (2002). Image-based modelling and render-
ing: A survey. RITA - Revista de Informatica Teorica
a Aplicada, 9(2):37 – 66. Brasillian journal, but paper
is in English.
Sloan, P.-P., Hall, J., Hart, J., and Snyder, J. (2003). Clus-
tered principal components for pre-computed radiance
transfer. In Proceedings: SIGGRAPH 2003, New
York, New York, USA, pages 382 – 391.
Sloan, P.-P., Kautz, J., and Snyder, J. (2002). Precomputed
radiance transfer for real-time rendering in dynamic,
low-frequency lighting environments. In Proceedings:
SIGGRAPH 2002, San Antonio, Texas, USA, pages
527 – 536.
SourceForge.net (2007). OpenCV Computer Vision Library,
www.sourceforge.net/projects/opencv/.
Westin, S., Arvo, J., and Torrance, K. (1992). Predict-
ing reflectance functions from complex surfaces. In
Proceedings: SIGGRAPH 1992, New York, New York,
USA, pages 255 – 264.
Wood, D. N., Azuma, D. I., Aldinger, K., Curless, B.,
Duchamp, T., Salesin, D. H., and Stuetzle, W. (2000).
Surface light fields for 3D photography. In Proceed-
ings: SIGGRAPH 2000, pages 287–296.
Yu, Y., Debevec, P., Malik, J., and Hawkins, T. (1999).
Inverse global illumination: Recovering reflectance
models of real scenes from photographs. In Pro-
ceedings: SIGGRAPH 1999, Los Angeles, California,
USA, pages 215 – 224.
Zickler, T., Enrique, S., Ramamoorthi, R., and Belhumeur,
P. (2005). Reflectance sharing: Image-based render-
ing from a sparse set of images. In Rendering Tech-
niques 2005: 16th Eurographics Workshop on Ren-
dering, pages 253–264.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
240
