
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY
SIMILAR MOTIONS
Yang Yuedong, Zhao Qinping
State Key Laboratory of Virtual Reality Technology, Beihang University, Xueyuan Road, Beijing, China
Hao Aimin,Wu Weihe
State Key Laboratory of Virtual Reality Technology, Beihang University, Xueyuan Road, Beijing, China
Keywords: Motion capture, logical classification, hierarchical clustering, DTW, DTW-Curve.
Abstract: Logical classification of motion data is the precondition of motion editing and behaviour recognition. The
typical distance metrics of sequences can not identify logical relation between motions well. Based on the
traditional DTW distance metrics, this paper proposes strategies bidirectional DTW and segment DTW,
both of which could improve the robustness of identifying logically related motions, and then proposes a
DTW-Curve method which is used to compare the logical similarity between the motions. The generation of
DTW-Curve includes three steps. Firstly, motions should be normalized to remove the global translation
and align the global orientation. Secondly, motions are resampled to cluster local frames and remove
redundant frames. Finally, DTW-Curve is generated under the control of different thresholds. DTW-Curve
may produce many statistical properties, which could be used to unsupervised logical classification of
motions. We propose two types of statistical properties, and classify motion data by using hierarchical
clustering procedure. The experiment results demonstrate that the logical classification based on DTW-
Curve has better classification performance and robustness.
1 INTRODUCTION
Motion capture is a popular way of obtaining
realistic motions for games and films. Motion data
are often stored in a motion library with behaviour
labels. Now, the clips need to be labelled and
classified manually. And this way consumes too
much time and energy.
The crucial point in classification is the
definition and judgment of the similarity between
motions. At present, there are two types of
similarity: numerical similarity and logical similarity
(Kovar and Gleicher, 2004, Muller et al., 2005).
Numerical similarity based on numerical comparison
is usually used in motion editing, motion graph and
motion synthesis. But logically similar motions need
not be numerically similar. For example, the motions
of kicking forward and kicking side have different
moving track and are not similar according to
numerical similarity, but they are similar and belong
to the same motion cluster semantically.
The classification based on numerical similarity
is simple, and mature. Dynamic time warping
(DTW) is a typical metric of evaluating the
numerical similarity. The basic idea of DTW is to
find an optimal alignment of two sequences by
stretching them with respect to time. Because DTW
warps the local data, DTW distance (the average of
optimized path) can identify the logical similarity
between two sequences to some extent. Meanwhile
there are two disadvantages of using DTW to judge
the logical similarity between two motions:
(1) Overly Restricted Constraints
DTW restricts searching range of optimized path
to accelerate DTW and avoid illegal problems, such
as non-monotony, discontinuousness and
degeneration (Kovar and Gleicher, 2004). However,
the conditions are overly restrictive for comparing
logical similarity.
(2) Poor Robustness
The DTW distance between two motions is a
numerical value. It is not robust to judge logical
281
Yuedong Y., Qinping Z., Aimin H. and Weihe W. (2008).
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY SIMILAR MOTIONS.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 281-289
DOI: 10.5220/0001093702810289
Copyright
c
SciTePress

similarity only by a numerical value because of its
sensitivity to the noise.
Logical similarity was proposed by Kovar (2004)
and was used for motion searching. Muller(2005)
adopted this idea and proposed a better motion
searching method. Muller(2006) further proposed
Motion Template which brought the concept of
logical similarity into motion classification, but MTs
need more training and learning.
The purpose of this paper is to build a simple
logical similarity metric without training. Based on
DTW, we propose two new strategies (bidirectional
DTW and segment DTW) to loosen the constraints,
and propose a DTW-Curve method which can be
used to compare the logical similarity of two
motions without training. DTW-Curve may produce
many statistical properties, which can be used for
unsupervised logical classification of motions. We
propose two kinds of statistical information, and
classified motion data by using hierarchical
clustering procedure. In order to evaluate the
classified results, this paper provides Reward-Punish
Value to evaluate and analyze the results.
2 RELATED WORK
Many scientists have researched in motion data
segmentation and clustering. Lee(2006) used PCA
method to represent low dimensional motion data,
and adopted self-organizing map (SOM) to cluster
these data, finally found Motion Primitives
Segmentation in motion data. Barbic(2004)
presented three models of automatic segmentation:
PCA, PPCA and Gaussian mixture model.
Souvenir(2005) chose Manifold Clustering method
to segment simple behavior motion. Seward (2005)
used non-linear dimension reduction in tangent
space to segment motion data. Jenkins (2002, 2003,
2004) derived the action and behavior primitives
from motion data by using ST-Isomap. The same
action could be clustered and generalized, and
further dimension reduction iterations were applied
to derive extended-duration behaviors.
The common conception in the methods above is
using dimension reduction or clustering to identify
the similarity of motions. The drawbacks of this
conception are that the quantity of data points will
affect the clustering, and that the procedure should
be re-executed if a new motion is concerted.
The logical similarity of motions is mainly used
for motion indexing and identifying. Kovar(2004)
presented a method to locate and extract motion
segments which were logically similar by using
multi-step searching. Muller(2005) proposed a class
of boolean features, called geometric features, to
express the geometric relations between poses. The
geometric features are powerful in describing and
specifying motions at a high semantic level. Based
on the geometric features, Muller(2006) introduced
the concept of motion templates(MTs) to capture the
essence of an entire class of logically related
motions. Although MTs are powerful concept for
classification, they need lots of training and learning
before being used.
Dynamic time warping (DTW) is a technique
frequently used for the optimal alignment of
sequences with given constraints (Cardle
2004)(Ratanamahatana 2005). Bruderlin and
Williams(1995) applied it to animation parameters
in their paper. Subsequent authors used it to align
motion clips before interpolation (Kovar and
Gleicher, 2003). Wang(2004) used time warping to
search appropriate blending length before blending
motion. Keogh (2004) indexed a large human-
motion database by using DTW to align the time
axis. Forbes(2005) found similarities in motion data
using DTW which must pass some seed points.
Hsu(2005) proposed iterative motion warping to
compute dense correspondences between
stylistically different motions. And Hsu(2007)
presented a time-warping technique to simplify the
process of motion editing.
Schödl(2000) searched the transition points in
the video sequences to synthesize new video.
Kova(2002) and Arikan(2002) adopted a similar
method with Schödl to search direct transition points
in motion sequences, and constructed a motion
graph. Gleicher(2003) created a graph structure with
a small number of hub nodes where transitions were
to occur. Inspired by them, we loosen the constraints
of DTW referring to the concept of transition points
and propose the segment DTW to improve the
effectiveness of logical classification.
3 EFFECTIVENESS OF LOGICAL
CLASSIFICATION
Many functions can be used to compare the
similarity of motions. Some of them are effective in
comparing the numerical similarity, and some are
effective in measuring the logical similarity. For the
sake of clarity, we propose two notions to describe
the classification ability of these functions.
(1)Effectiveness of Numerical Classification
(EoNC): EoNC evaluates the performance of a
function on numerical classification. Good
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
282
performance means the function can cluster most of
motions which are numerically similar. DTW has
perfect performance on numerical classification, so
it has a high EoNC. However, logical classification
algorithms may have low EoNC, such as our method,
because they cluster the motions which are not
numerically similar.
(2) Effectiveness of Logical
Classification(EoLC): EoLC is used to evaluate the
performance of a function on logical classification.
If a function has a high EoLC, it can cluster most of
motions which are logically similar.
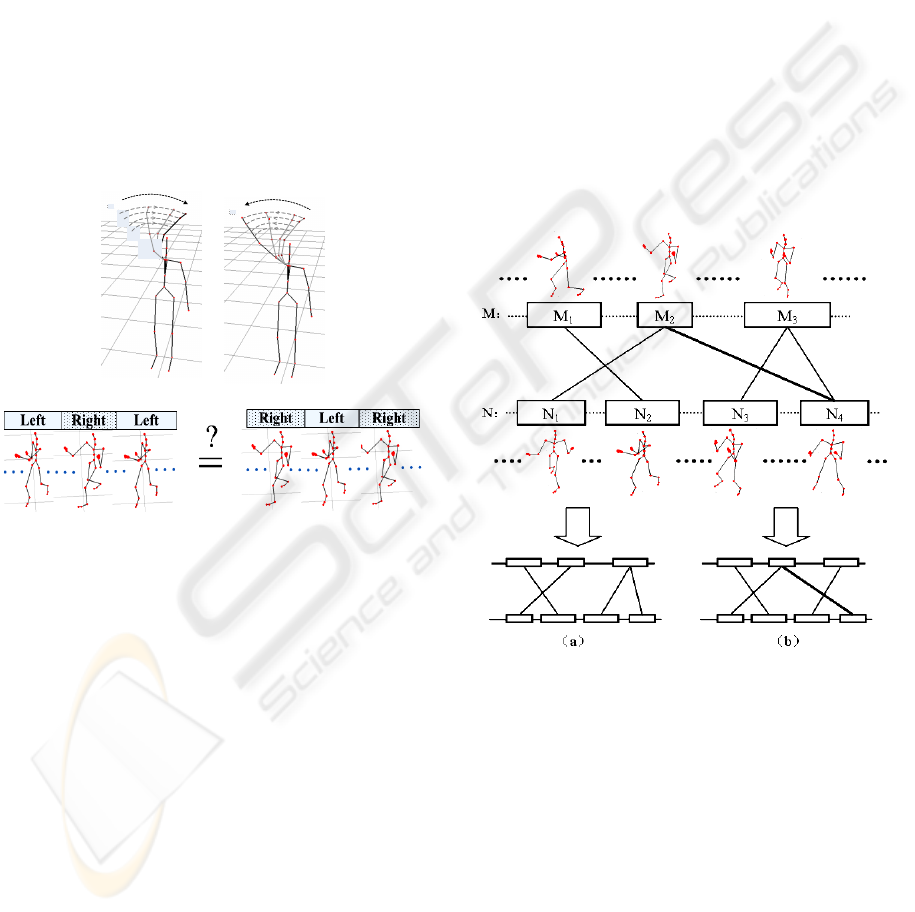
Some motions are similar with their symmetrical
motions. For example, the two motions of
“clockwise waving” and “anticlockwise waving” are
semantically similar to each other, and they belong
to the same motion cluster(Fig.1 a). However, they
may not be similar if evaluated by DTW.
=
?
(a)
(b)
Figure 1: Logically similar motions may be numerically
dissimilar. (a): Clockwise waving and anticlockwise
waving. (b): Two cross-similar boxing.
Some motions are cross-similar between their
segments. For instance (Fig.1 b), a boxing motion is
composed of three segments (“left-boxing, right-
boxing” and “left-boxing”). Another boxing motion
is also composed of three segments (“right-boxing”,
“left-boxing” and “right-boxing”). Both of the
boxing motions are regarded as logically similar,
although they have a large DTW distance value.
In this paper, we presente two strategies to
identify the symmetrical similarity and cross-
similarity based on typical DTW.
(1)Bidirectional Dynamic Time Warping (B-DTW)
In general, a motion
123
( , , ,..., )
n
NGGG G= may
be viewed as logically similar with its symmetrical
motion
12 1
( , , ,..., )
nn n
NGGG G
−−
′
=
. Mathematically,
given two motions
M
and N , the DTW distance
between
M
and N is (,)
dtw
dMN, and the DTW
distance between
M
and N
′
is (, )
dtw
dMN
′
. Then
the B-DTW distance between
M
and N is defined
as:
(,)
Bdtw
dMN
−
=min{ (,)
dtw
dMN, (, )
dtw
dMN
′
}
(1)
B-DTW could improve the effectiveness of
logical classification by applying DTW in two
symmetrical directions.
(2)Segment Dynamic Time Warping(S-DTW)
We split the motions into some segments and
compute the B-DTW distance between them. The
S-DTW distance is defined as the minimum sum of
B-DTW distance which could cover all the
segments.
Take two motions
M
and N (Fig.2) for example.
M
is segmented into
1
M
,
2
M
and
3
M
, and N is
also split into four segments:
1
N ,
2
N ,
3
N and
4
N .
Figure 2: Schematic of S-DTW process.
If all the B-DTW distance between the segments
are
12
(,)
Bdtw
dMN
−
,
21
(,)
Bdtw
dMN
−
,
24
(,)
Bdtw
dMN
−
,
33
(,)
Bdtw
dMN
−
and
34
(,)
Bdtw
dMN
−
.
And
24
(,)
Bdtw
dMN
−
>
34
(,)
Bdtw
dMN
−
.
There are two ways to sum up the B-DTW distance
and cover all the segments:
(a)
(,)
Sdtw
dMN
−
=
12
(,)
Bdtw
dMN
−
+
21
(,)
Bdtw
dMN
−
+
33
(,)
Bdtw
dMN
−
+
34
(,)
Bdtw
dMN
−
(b)
(,)
Sdtw
dMN
−
′
=
12
(,)
Bdtw
dMN
−
+
21
(,)
Bdtw
dMN
−
+
33
(,)
Bdtw
dMN
−
+
24
(,)
Bdtw
dMN
−
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY SIMILAR MOTIONS
283
Because
24
(,)
Bdtw
dMN
−
>
34
(,)
Bdtw
dMN
−
, the S-
DTW distance between
M
and N is (a).
Because this algorithm need search the minimum
of distance, it will contain lots of iterations. If there
are
n
jumps (connection in Fig.2) between
M
and
N , !n times of iteration should be executed and the
worst-case running time is
()
n
On . In order to
improve the algorithm’s efficiency, we may reduce
the time cost by the condition (“cover all the
segments”) in the definition of S-DTW. If a segment
has only one jump (connection) with other segments,
the total times of iteration will fall to
(1)!n − . This
improvement could reduce the running time by 97%.
4 DTW-CURVE GENERATION
The key of the S-DTW algorithm is splitting the
motions into segments. In this paper, we propose a
novel method of segmentation based on distance
thresholds. Given a threshold, we can identify all the
potential similar segments and obtain S-DTW
distance. As the threshold changes, a set of S-DTW
distance values can be generated, and we define the
set of values as DTW-Curve.
The overview of DTW-Curve generation is
illustrated in Fig.3, which contains three phases.
Given two motions
M
and N , firstly, they both
should be normalized to remove the global
translation and align the global orientation. Then
they are resampled to cluster local frames and
remove redundant frames. Finally, DTW-Curve is
generated under the control of thresholds.
Motion Data
M
Normalizing
Resampling
DTW-Curve
Motion Data
N
S-DTW
threshold
Figure 3: The overview of DTW-Curve generation.
4.1 Normalizing
A motion is fundamentally unchanged by a rotation
about the vertical axis and a translation along the
floor plane. For example, all walking towards
different directions are logically similar. Therefore,
the global translation should be removed and the
orientation should be aligned.
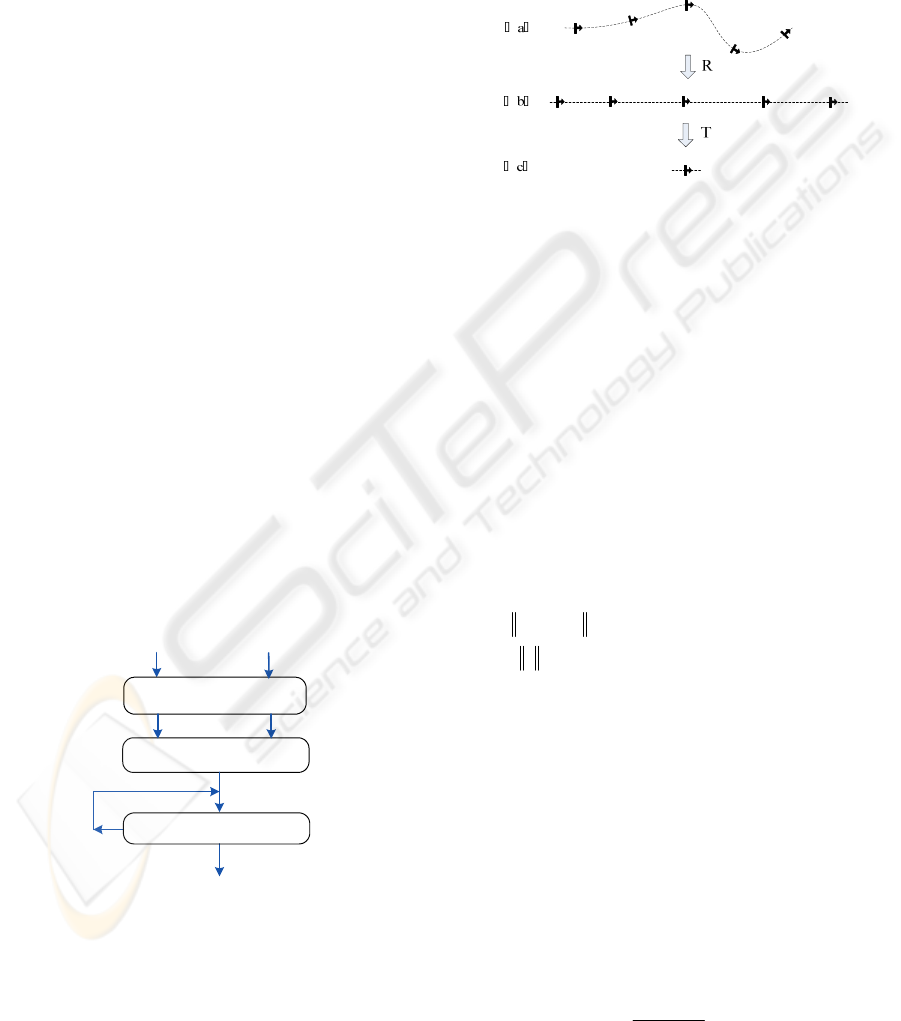
For example, Fig.4(a) is a motion showed in 2D
space. After rotating, each frame of the motion
oriented to the same orientation (Fig.4 b). And after
translating, the roots of all the frames have the same
position (Fig.4 c).
Figure 4: The process of normalizing. (a): A motion
showed in 2D. (b): Align the orientation about the vertical
axis. (c): Remove the global translation.
4.2 Resampling
People are sensitive to high-frequency motion, so
they identify a motion by its high-frequency part.
The low-frequency segments, such as standing,
make less contribution to the classification, and even
result in a wrong classification. For instance, a
motion
M
is composed of standing and boxing, and
N is composed of standing and kicking. The longer
the standing time lasts, the lower the S-DTW
distance between
M
and N will be. In order to
overcome this problem, we clustered low-frequency
frames and generated a new motion.
Given a normalized motion
12
(, ,..., )
m
M
FF F= ,
1
2
ii i
dFF
+
∇= −
denotes first order difference,
where
2
•
is L2 norm. If the sum of
i
d
∇
in
continuous
k frames is less than a user-defined
threshold
ε
, and the sum in continuous
k
+1 frames
is larger than or equal to
ε
, the k frames will be
clustered into one frame. Mathematically, let
()Cluster M denote the new motion after clustering:
()Cluster M =
23
12
,1 ,
,1
12
( , ,... )
n
mm mm
mm
n
GG G
−
−
=
12
(, ,...)
Cn
M
mm m
ε
(2)
where
1
,1
ii
mm
i
G
+
−
is the
th
i frame in the new motion
and is generated after clustering the frames (
i
m to
1i
m
+
-1) in the old motion. That is,
1
1
1
,1
1
1
i
ii
i
m
mm
ik
km
ii
GF
mm
+
+
−
−
=
+
=
−
∑
(3)
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
284
In the clustering process, the parameters
12
(, ,...)
n
mm m are specified by the constraints (4)
and (5):
ε
<∇
−−
∑
−
=
+
+
2
1
1
1
1
i
i
m
mk
k
ii
d
mm
(4)
ε
≥∇
−
∑
−
=
+
+
1
1
1
1
i
i
m
mk
k
ii
d
mm
(5)
The essence of clustering is resampling the
motion and compressing the low-frequency
segments. Although the motion length is shortened,
the high-level behaviour denoted by the motion is
not changed.
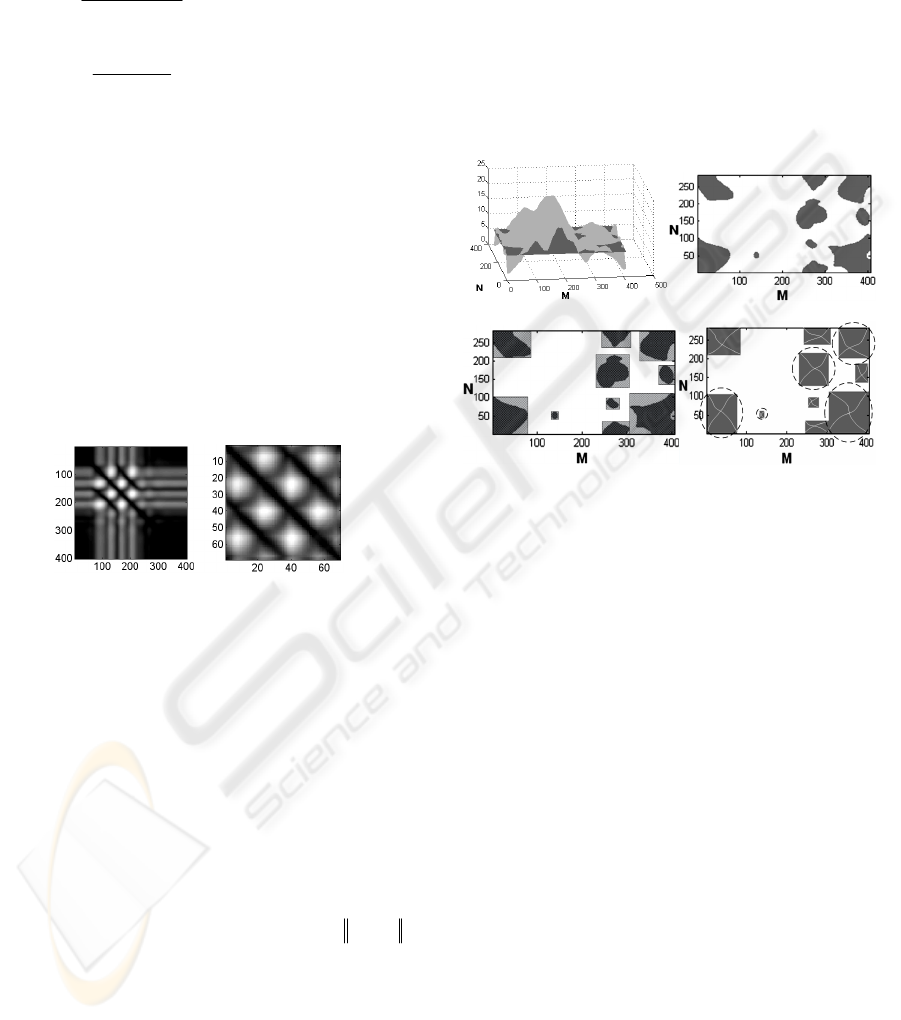
For example, a motion (420 frames) is composed
of standing and walking. The distance matrix is
computed between every pair of frames in the
motion (Fig.5 left). After clustering and resampling,
a new motion (78 frames) is generated. The new
distance matrix is illustrated in the right of Fig.5. By
comparing the two figures, we can find the motion
has been compressed without affecting the high-
level behaviour.
Figure 5: Resampling doesn’t change the high-level
behaviour of motion. Left: The distance matrix of initial
motion. Right: The distance matrix of resampled motion.
The clustering not only compresses the motion
and reduces the length, but improves the computing
efficiency. What’s more, the clustering can improve
EoLC, because it only retains the frames which
contribute to the logical classification.
4.3 Creating DTW-Curve
The two motions
12
( , ,..., )
m
M
FF F=
and
12
( , ,..., )
n
N
GG G=
compose a distance matrix
(,)DM N , where the element
2
(, )
ij
D
ij F G=−
represents the Euler distance between the
th
i frame
of
M
and
th
j frame of N .
Given a threshold parameter [0,1]
λ
∈ and the
corresponding threshold
δ
(Fig.6 a).
δ
=(max( (,)DM N )-min( (,)DM N ))
λ
×
+min(
(,)DM N )
(6)
Several 8-connecting zones(Fig.6 b) are obtained
by eliminating the elements bigger than
δ
in the
distance matrix
D
. The 8-connecting zone is an
area, in which all points are 8-neighbors and below
the distance threshold in the self-similarity matrix.
The values in every 8-connecting zone are less
than or equal to the threshold
δ
, which means the
two motion segments in the connecting zone are
potentially similar pairs of motion segments. We
define the least enveloped rectangle of the
connecting zone as Least Similar Zone, which is
showed in the shadow rectangle of the fig.6(c).
(a) (b)
(c) (d)
Figure 6: The process of creating DTW-Curve. (a): Setting
a threshold parameter. (b): Obtaining several 8-connection
zones. (c): Defining shadow rectangle as Least Similar
Zone. (d): computing the bidirectional DTW distances of
all Least Similar Zones and obtaining the S-DTW distance
under the threshold.
Mathematically, the Least Similar Zone is the
distance matrix of some segments of
M
and N ,
and its average distance is less than the average
distance of every neighbour distance matrixes with
the same dimension. So the two segments in the
Least Similar Zone are potentially similar.
According to the S-DTW algorithm, we compute the
bidirectional DTW distances of all Least Similar
Zones, and obtain the S-DTW distance
(, , )
Sdtw
dMN
λ
−
between
M
and N (Fig.6 d),
where
λ
represents threshold parameter,
M
and N
are the motion sequences which are normalized and
resampled.
[0,1]
λ
∈
is independent of the motion length and
distance range. Generally, the parameter
λ
determines the total area of the Least Similar Zones.
As
λ
becomes smaller, the total area will become
smaller and the metric error will become larger. But
as the total area becomes larger, the robustness of
method will become poorer.
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY SIMILAR MOTIONS
285
Especially, when the threshold
λ
is equal to 1,
there exists only one Least Similar Zone which is the
distance matrix
(,)DM N . That is,
(1, , )
Sdtw
dMN
−
= (,)
Bdtw
dMN
−
and EoNC is the
largest now.
When
λ
is equal to 0, (0, , )
Sdtw
dMN
−
=0. It
means the value is meaningless to the logical
classification and both of EoNC and EoLC are the
smallest.
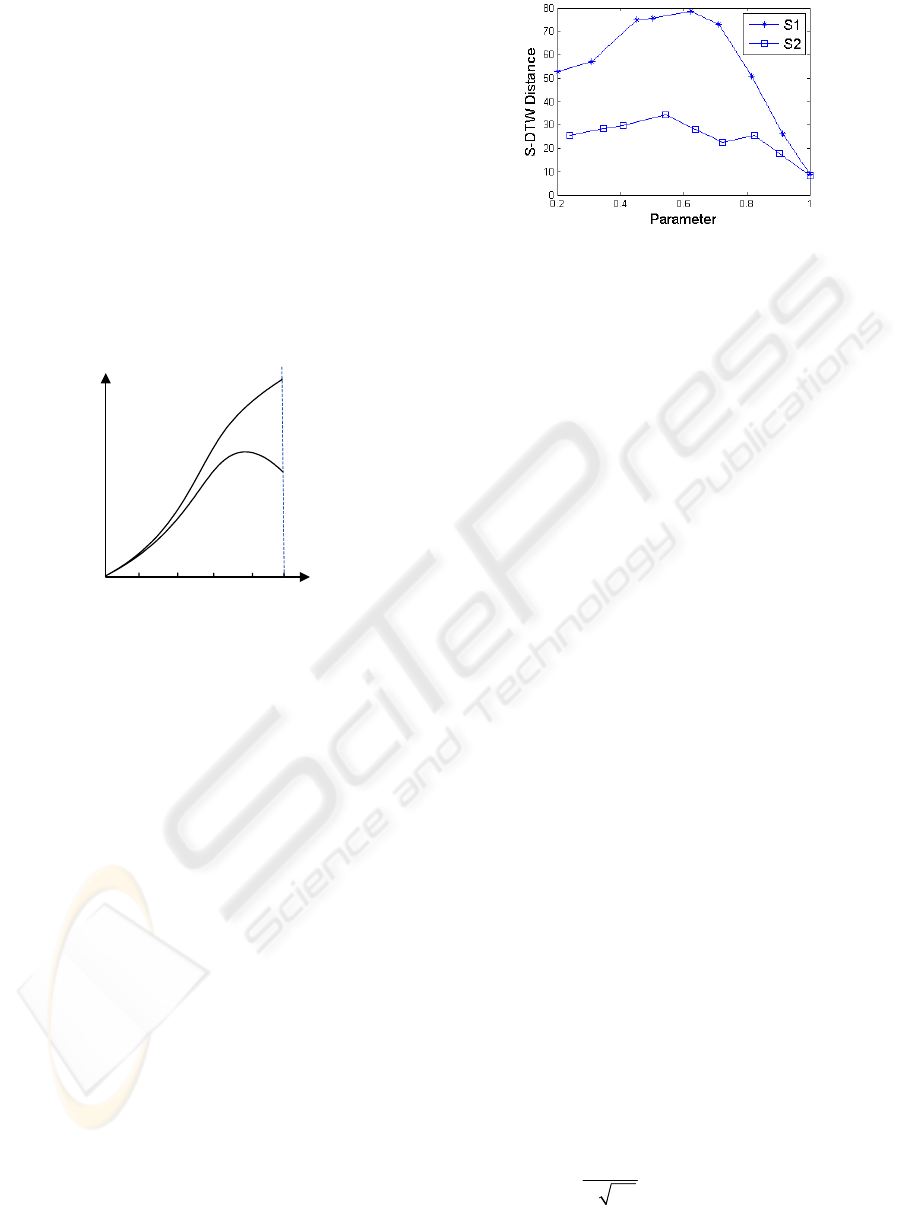
As
λ
increases from 0, EoNC and EoLC
increase gradually. While
λ
is approaching to 1,
EoNC continues to increase, but EoLC decreases
because of the numbers of Least Similar Zones
become reduce. (See Figure 7).
Parameter
Effectiveness
1
0
EoNC
EoLC
Figure 7: The EoNC curve and EoLC curve.
Each threshold parameter
λ
is corresponding to
a S-DTW distance, so we will obtain a set of
(, , )
Sdtw
dMN
λ
−
as the threshold
λ
changes. The
distance curve formed by the set of
(, , )
Sdtw
dMN
λ
−
is called DTW-Curve.
When the value of
λ
is close to 0, the EoLC is
too low to be used for classification. So we only
select a segment of DTW-Curve, in which the
threshold
λ
is [0.3, 1].
Because DTW-Curve is formed by a set of S-
STW values, it has a higher EoLC and higher
robustness than a single S-DTW value does.
Therefore, DTW-Curve is a more feasible method to
evaluate the similarity of two motions.
We take an example to further describe the
features of DTW-Curve. Given three motions
jumping1, jumping2 and basketball, we can obtain
DTW-Curves in the threshold parameter range [0.3,
1] (Figure 8).
Figure 8: Comparing the similarity of three motions based
on DTW-Curve. S1 denotes the DTW-Curve between
jumping1 and basketball. S2 denotes the DTW-Curve
between jumping1 and jumping2.
Let
1
()S
λ
denote DTW-Curve between jumping1
and
basketball, and let
2
()S
λ
denote DTW-Curve
between
jumping1 and jumping2.
When
λ
=1,
1
(1)S is almost equal to
2
(1)S . That
is, judging by the DTW distance, three motions are
logically similar. However, judging by the DTW-
Curve, the logical distance between
jumping1 and
basketball is larger than the logical distance between
jumping1 and jumping2, because the curve
1
S is
above
2
S . The result proves that DTW-Curve is
more reasonable than typical DTW for identifying
the logical relationship of motions.
5 LOGICAL CLASSIFICATION
DTW-Curve could produce many statistical
properties, which could be used to unsupervised
logical classification of motion data. In this paper,
we propose two kinds of statistical information, and
classify motion data by using hierarchical clustering
procedure.
(1) Weighted DTW Distance
We take EoLC as the weight, and sum the
distance of DTW-Curve. Mathematically, the
weighted DTW distance is defined as:
(,)
Wdtw
dMN
−
=
1
0
() (, , )
EoLC S dtw
WdMNd
λ
λλ
−
⋅
∫
(7)
We assume the function of EoLC is:
22
(0.7)/2
00.3
()
1
0.3 1
2
EoLC x
x
Wx
ex
σ
σπ
−−
≤
⎧
⎪
=
⎨
<<
⎪
⎩
(8)
where the standard deviation
σ
is 0.3.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
286
In order to improve the efficiency, we adopt the
sum of discrete value instead of integral in the
algorithm. We split the parameter
λ
into 8 intervals:
(0,0.3], (0.3,0.4] , (0.4,0.5], (0.5,0.6], (0.6,0.7],
(0.7,0.8], (0.8,0.9] and (0.9,1]. And only a parameter
is selected in each interval randomly.
The distance between the cluster
i
D and
j
D is
defined as:
(, )max( (,))
i
j
ij Wdtw
MD
ND
dD D d MN
−
∈
∈
=
(9)
When the minimum of (, )
ij
dD D is larger than
classification threshold
μ
, the procedure will finish.
And the algorithm is also called complete-linkage
algorithm.
(2) Fuzzy Distance
In this algorithm, the distance of motions is
expressed by an interval, called fuzzy distance. The
fuzzy distance is defined as:
[]
(,)dMN
⋅
=
[,]ab =
[min( ( , , )), max( ( , , ))]
Sdtw Sdtw
dMNdMN
λ
λ
−−
(10)
where
[0.3,1]
λ
∈
.
Then the distance between the clusters
i
D and
j
D is defined as:
(, )[,]
ij
dD D cd==
[] []
[min( (,).),max( (,).)]
i
i
j
j
MD
MD
ND
ND
dMNa dMNb
⋅⋅
∈
∈
∈
∈
(11)
In the algorithm, there are two parameters:
classification threshold
μ
and fuzzy parameter
τ
. If
the value of
()dc c
τ
−×+ is less than
μ
, the two
clusters can be merged. When fuzzy parameter
τ
is
0, the algorithm can be called single-linkage
algorithm. And when
τ
is 1, the algorithm can be
called complete-linkage algorithm. In the
implementation, we set
τ
=0.5.
6 EXPERIMENTS AND RESULTS
We implemented our algorithms in Matlab and ran
the experiments on a machine with 1GB of memory
and 2.8 GHz Pentium D processor.
We random selected 80 motion sequences from 6
clusters, and each motion sequence consisted of
about 800 frames. These sequences included 11
basketball, 6 soccer, 7 boxing, 17 jumping, 20
running and 19 walking.
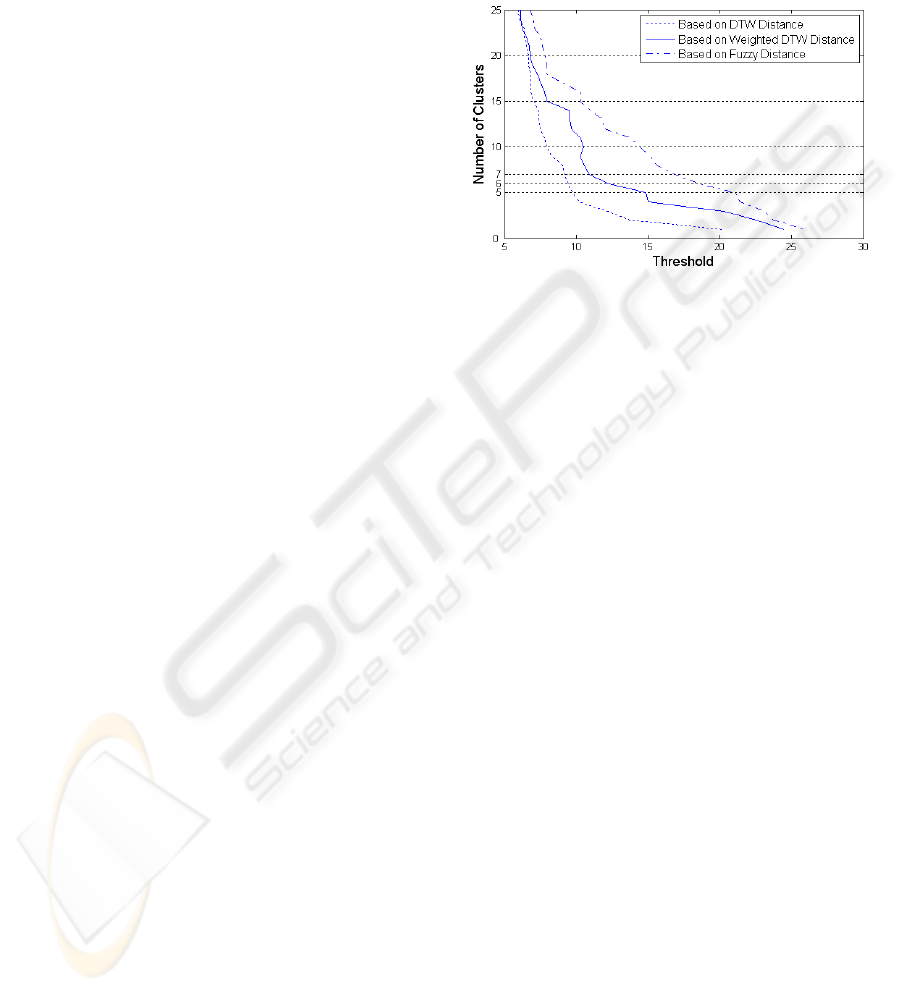
We calculate the DTW distance matrix, weighted
DTW distance matrix and fuzzy distance matrix of
the 80 motion sequences. And we cluster them using
the algorithm in the section 5. As the classification
threshold
μ
changes, we obtain a
κ
μ
- curve (Fig.
9), where
k is the number of clusters.
Figure 9: The
κ
μ
- curves based on three types of
distance.
The Fig.9 illustrates that the logical classification
based on DTW-Curve has some advantages below:
(1) Good performance of classification: When
using traditional DTW distance, the difference
between the threshold value corresponding to the
number of clusters 5 and the threshold value
corresponding to the number 7 is unobvious. That is,
the threshold strip of the number 6 is narrow and has
poor performance of classification. When using the
algorithm proposed in this paper, the threshold strip
of the number 6 is broader and has better
performance.
(2) Good extensibility: We can obtain many
statistical properties from DTW-Curve, and all of
them can be used for classification. That is, the
algorithm proposed in this paper has better
extensibility than traditional DTW.
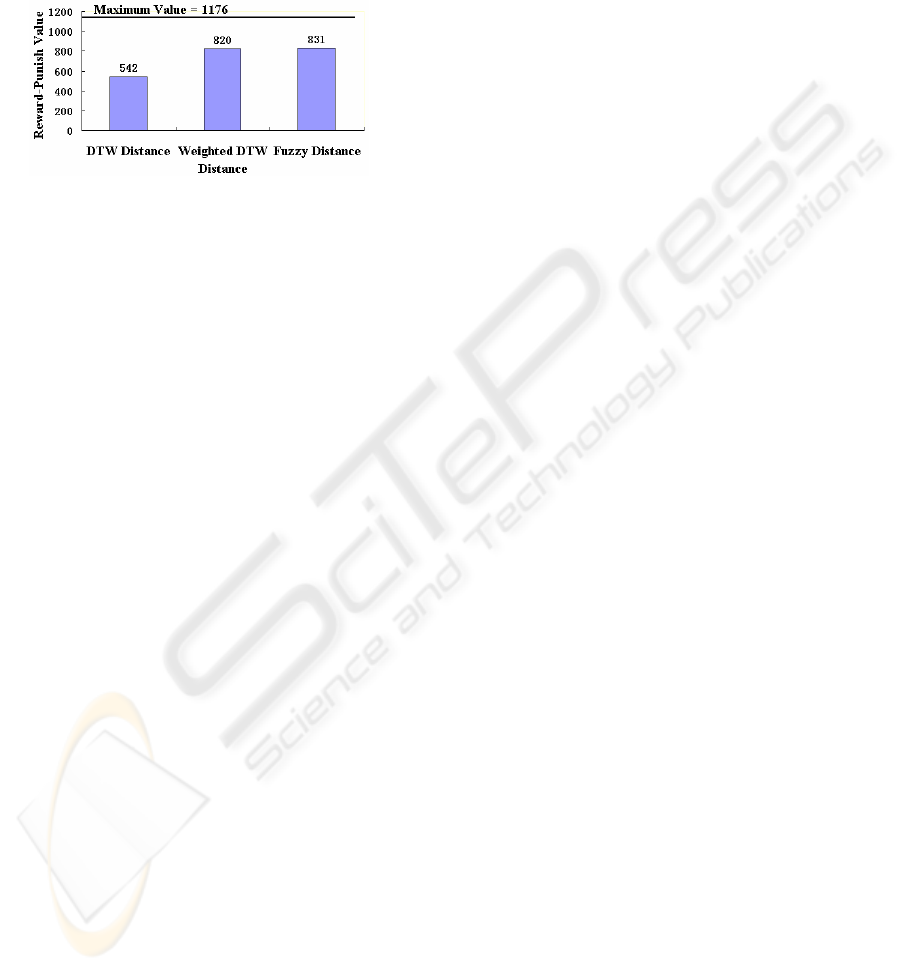
In order to evaluate the classification error, we
propose an evaluating metric: Reward-Punish Value.
Its main idea is rewarding the classification
algorithm which clusters two motions correctly,
otherwise punishing it. Mathematically, given a
classification algorithm
f
. It classifies motion
sequences to
K
clusters, which are
1
C ,
2
C ,…, and
K
C . We define the Reward-Punish Value of
f
under the numbers of clusters
K
as:
1
(, ) ( , )
ik
jk
K
R
Pij
kMC
MC
ij
VfK FMM
=∈
∈
≤
=
∑∑
(12)
Where
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY SIMILAR MOTIONS
287
1()()
(,)
1() ()
cluster M cluster N
FMN
cluster M cluster N
=
⎧
=
⎨
−≠
⎩
(13)
If the two motions belong to the same cluster,
F
=1or else
F
= -1. When the number of clusters
is 6, we calculate the Reward-Punish Values of three
types of classification algorithm (see Fig. 10) .
Figure 10: The Reward-Punish Values of three types of
classification algorithm.
The Reward-Punish Value of the best
classification algorithm is 1176. The fig.10
illustrates that all of the three algorithms could not
reach the maximum value, but compared to the
traditional DTW method, the algorithms in this
paper could obtain larger Reward-Punish Values and
the results are closer to the best classification.
7 CONCLUSIONS
Based on traditional DTW distance, this paper
proposed two strategies (bidirectional DTW and
segment DTW) and a method (DTW-Curve) to
compare the motions logical similarity. Comparing
to conventional DTW, DTW-Curve had better
logical classification performance and robustness.
Then we proposed two types of statistical
properties (Weighted DTW Distance and Fuzzy
Distance), and classified motion data by using
hierarchical clustering procedure. And we compared
them with DTW distance metric by using Reward-
Punish Value. The experiment showed that DTW-
Curve method could lead to more reasonable logical
classification results.
Based on the current work, the further work is
probably as follows:
(1) Motion recognition and retrieval. DTW-Curve
can identify logical similarity more effectively, so
we can extend the method to unsupervised motion
recognition and retrieval.
(2) Algorithm efficiency. One major drawback of
DTW-Curve is that it can not be generated real-time
because of lots of iterations. So we should improve
the algorithm efficiency in the future.
ACKNOWLEDGEMENTS
We would like to thank the Graphics Lab. of
Charnegic Mellon University for generously
providing their motion capture data on their web.
This work was supported by China High-tech
Olympics Project (Z0005191041211) and China 863
Project (No. 2006AA01Z333).
REFERENCES
Kovar, L. & Gleicher, M., 2004. Automated extraction and
parameterization of motions in large data sets. In
International Conference on Computer Graphics and
Interactive Techniques. Los Angeles, California, ACM
Press.
Muller, M., Roder, T. & Clausen, M., 2005. Efficient
content-based retrieval of motion capture data. ACM
Trans. Graph., 24, 677--685.
Muller, M. & Roder, T., 2006. Motion Templates for
Automatic Classification and Retrieval of Motion
Capture Data. In Proceedings of the 2006 ACM
SIGGRAPH / Eurographics Symposium on Computer
Animation (SCA 2006). Vienna, Austria, Eurographics
Association.
Lee, C. & Elgammal, A., 2006. Human Motion Synthesis
by Motion Manifold Learning and Motion Primitive
Segmentation. In IV Conference of Articulated Motion
and Deformable Objects (AMDO). Mallorca, Spain,
LNCS.
Barbic, J., Safonova, A., Pan, P., Faloutsos, P., Hodgins, P.
K. & Pollard, N. S., 2004. Segmenting motion capture
data into distinct behaviors. In Proceedings of the
2004 conference on Graphics interface GI '04.
University of Waterloo, Canadian Human-Computer
Communications Society.
Souvenir, R. & Pless, R., 2005. Manifold Clustering. In
Proceedings of the Tenth IEEE International
Conference on Computer Vision (ICCV'05). Beijing,
IEEE Computer Society.
Seward, A. E. & Bodenheimer, P., 2005. Using nonlinear
dimensionality reduction in 3D figure animation. In
Proceedings of the 43rd annual Southeast regional
conference. Kennesaw, Georgia, ACM Press.
Cardle, M., 2004. Technical Report: Automated Motion
Editing. Computer Laboratory, University of
Cambridge, UK.
Ratanamahatana, C. A. and Keogh. E, 2005. Three Myths
about Dynamic Time Warping. In proceedings of
SIAM International Conference on Data Mining (SDM
'05), Newport Beach, CA.
Bruderlin, A. & Williams, L., 1995. Motion signal
processing. In Proceedings of the 22nd annual
conference on Computer graphics and interactive
techniques. ACM Press.
Kovar, L. & Gleicher, M., 2003. Flexible automatic
motion blending with registration curves. In
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
288

Proceedings of the 2003 ACM
SIGGRAPH/Eurographics symposium on Computer
animation. San Diego, California, Eurographics
Association.
Wang, J. & Bodenheimer, B., 2004. Computing the
duration of motion transitions: an empirical approach.
In Proceedings of the 2004 ACM
SIGGRAPH/Eurographics symposium on Computer
animation. Grenoble, France, Eurographics
Association.
Keogh, E., Palpanas, T., Zordan, V. B., Gunopulos, D. &
Cardle, M., 2004. Indexing Large Human-motion
Databases. In Proceding of the 30th VLDB Conference.
Toronto, Canada.
Forbes, K. & Fiume, E., 2005. An efficient search
algorithm for motion data using weighted PCA. In
Proceedings of the 2005 ACM
SIGGRAPH/Eurographics symposium on Computer
animation. Los Angeles, California, ACM Press.
Hsu, E., Pulli, P. & Popovic, J., 2005. Style translation for
human motion. In International Conference on
Computer Graphics and Interactive Techniques. Los
Angeles, California, ACM Press.
Hsu, E., Silva, M. D. & Popovic, J., 2007. Guided time
warping for motion editing. In Proceedings of the
2007 ACM SIGGRAPH/Eurographics symposium on
Computer animation. San Diego, California,
Eurographics Association.
Schödl, A., Szeliski, R., Salesin, D. H. & Essa, I., 2000.
Video textures. In Proceedings of the 27th annual
conference on Computer graphics and interactive
techniques. , ACM Press.
Kovar, L., Gleicher, M. & Pighin, F., 2002. Motion graphs.
ACM Trans. Graph., 21, 473-482.
Arikan, O. & Forsyth, D. A., 2002. Interactive motion
generation from examples. In Proceedings of the 29th
annual conference on Computer graphics and
interactive techniques. San Antonio, Texas, ACM
Press.
Gleicher, M., Shin, H. J., Kovar, L. & Jepsen, A., 2003.
Snap-together motion: assembling run-time
animations. ACM SIGGRAPH 2003. San Diego,
California, ACM Press.
Jenkins O. C., Mataric M. J., 2002. Deriving Action and
Behavior Primitives from Human Motion Data. In the
IEEE/RSJ International Conference on Intelligent
Robots and Systems. Lausanne, Switzerland,.
Jenkins, O. C. & Mataric, M. J., 2003. Automated
derivation of behavior vocabularies for autonomous
humanoid motion. In Proceedings of the second
international joint conference on Autonomous agents
and multiagent systems. Melbourne, Australia, ACM
Press.
Jenkins, O. C. & Mataric, M. J., 2004. A spatio-temporal
extension to Isomap nonlinear dimension reduction. In
Proceedings of the twenty-first international
conference on Machine learning. Alberta, Canada,
ACM Press.
DTW-CURVE FOR CLASSIFICATION OF LOGICALLY SIMILAR MOTIONS
289
