
CONTINUOUS
LEARNING OF SIMPLE VISUAL CONCEPTS USING
INCREMENTAL KERNEL DENSITY ESTIMATION
∗
Danijel Sko
ˇ
caj, Matej Kristan and Ale
ˇ
s Leonardis
Faculty of Computer and Information Science, University of Ljubljana Tr
ˇ
zaˇska 25, SI-1001 Ljubljana, Slovenia
Keywords:
Continuous learning, incremental learning, incremental kernel density estimation, learning associations.
Abstract:
In this paper we propose a method for continuous learning of simple visual concepts. The method continu-
ously associates words describing observed scenes with automatically extracted visual features. Since in our
setting every sample is labelled with multiple concept labels, and there are no negative examples, reconstruc-
tive representations of the incoming data are used. The associated features are modelled with kernel density
probability distribution estimates, which are built incrementally. The proposed approach is applied to the
learning of object properties and spatial relations.
1 INTRODUCTION
An important characteristic of a system that operates
in a real-life environment is the ability to expand its
current knowledge. The system has to create and ex-
tend concepts by observing the environment – and
has to do so continuously, in a life-long manner. An
integral part of such a continuous learning system
is a method for incremental updating of previously
learned representations, which has to fulfill several
requirements: (i) the learning algorithm should be
able to update the current representations (and create
new ones if necessary), (ii) it should not require ac-
cess to old (previously processed) original data, (iii)
the representations should be kept compact, and (iv)
the computational effort needed for a single update
should not depend on the amount of previously ob-
served data.
In this paper we present an algorithm that ad-
dresses these requirements in the context of learn-
ing associations between low-level visual features and
higher-level concepts. In particular, we address the
problem of continuous learning of visual properties
(such as colour or shape) and spatial relations (such
as ‘to the left of’ or ‘far away’). The main goal is
to find associations between words describing these
concepts and simple visual features extracted from
∗
This
research has been supported in part by the
EU project CoSy (FP6-004250-IP) and Research program
Computer Vision P2-0214 (RS).
images.
In our setting, the inputs in the learning process
are partial descriptions of the scene; descriptions of
the objects and relationships between them. An ob-
ject can be labeled with several concept labels (e.g.,
object A can be ‘yellow’ and ‘round’ and positioned
‘in the middle’ of the image and ‘to the left of’ object
B). These descriptions serve as learning examples.
There are no negative examples (e.g., the information
that ‘yellow’ is not ‘red’ is not provided). Therefore,
the algorithm should build reconstructive representa-
tions without relying on discriminative information,
which would discriminate between different classes
(i.e., concepts) (Fidler et al., 2006). It can only ex-
ploit consistency of the feature values extracted from
the objects labelled with the same concept and speci-
ficity of these values with respect to the rest of the
feature values related to other concept labels.
The contribution of this paper is twofold. First, we
present a method that is able to continuously process
input feature vectors and learn corresponding associa-
tions based on the consistency and specificity criteria.
Similar problems are commonly referred to as exam-
ples of the symbol grounding problem and have of-
ten been tackled by different researchers in different
settings (Harnad, 1992; Ardizzone et al., 1992; Roy
and Pentland, 2002; Roy, 2002; Vogt, 2002). Sev-
eral papers have also been published addressing on-
line learning, particularly with regard to object recog-
nition (Kirstein et al., 2005; Steels and Kaplan, 2001;
Arsenio, 2004). In our system, however, we utilize,
598
Sko
ˇ
caj D., Kristan M. and Leonardis A. (2008).
CONTINUOUS LEARNING OF SIMPLE VISUAL CONCEPTS USING INCREMENTAL KERNEL DENSITY ESTIMATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 598-604
Copyright
c
SciTePress

in a unified framework, continuous online learning of
qualitative object properties and spatial relations in
a setting with no negative examples and when every
sample is labelled with multiple concept labels, with
a view toward using this as a basis for further learning
and facilitating unlearning as well.
To facilitate this type of learning, our method
models the values of features, that are associated
with individual concepts, by estimating the probabil-
ity density function that generated them. To that end,
we employ kernel density estimates (KDE), which
apply a mixture of kernels to approximate the un-
derlying density. Since the models have to be esti-
mated continuously from the arriving data, we con-
struct a kernel for each incoming data and use it to
update the corresponding distributions. This boils
down to estimating the single parameter of the kernel
– its bandwidth. We propose a method for estimat-
ing the bandwidth of each incoming kernel, which
is the second contribution of this paper. A number
of bandwidth selection methods have been proposed
previously which aim to minimize the asymptotic-
mean-integrated-squared-error (AMISE) between the
unknown original distribution and its approximation
based on a set of the observed samples (e.g., Wand
and Jones (Wand and Jones, 1995)). However, these
approaches are not directly applicable in incremental
settings. To that end, various incremental approaches
have been proposed which usually incorporate some
constraints or prior knowledge of the relation between
the consecutive samples (Elgammal et al., 2002; Han
et al., 2004), like temporal coherence on the incom-
ing data (Arandjelovic and Cipolla, 2005; Song and
Wang, 2005). Szewczyk (Szewczyk, 2005) applies a
Dirichlet process prior on components and applies a
Gamma density prior to sample the bandwidth of the
incoming data. A drawback of this approach, how-
ever, is that the parameters of the prior need to be
specified for a given problem. Here, we propose an
incremental bandwidth selection approach that does
not assume any temporal coherence and does not re-
quire setting a large number of parameters.
The paper is organised as follows. First we intro-
duce the main incremental learning algorithm. Then
we explain the algorithm for incremental updating of
KDE representations. In section 4 we then present
the evaluation of the proposed methods. Finally, we
summarize and outline some work in progress.
2 MAIN INCREMENTAL
LEARNING ALGORITHM
The main task of the incremental algorithm is to as-
sign associations between extracted visual features
and the corresponding visual concepts. Since our
system is based on positive examples only (we do
not have negative examples for the concepts being
learned), and each input instance can be labelled with
several concept labels, the algorithm can not exploit
discriminative information and can rely only on re-
constructive representations of observed visual fea-
tures. Each visual concept is associated with a vi-
sual feature that best models the corresponding im-
ages according to the consistency and specificity cri-
teria. It must determine which of the automatically
extracted visual features are consistent over all im-
ages representing the same visual concept and that
are, at the same time, specific for that visual concept
only. The learning algorithm thus selects from a set
of one-dimensional features (e.g., median hue value,
area of segmented region, coordinates of the object
center, distance between two objects, etc.), the feature
whose values are most consistent and specific over all
images representing the same visual concept (e.g., all
images of large objects, or circular objects, or pairs of
objects far apart etc.). Note that this process should
be performed incrementally, considering only the cur-
rent image (or a very recent set of images) and learned
representations – previously processed images cannot
be re-analysed.
Therefore, at any given time, each concept is asso-
ciated with one visual feature, i.e., with the represen-
tation built from previously observed values of this
feature. A Kernel Density Estimate (KDE) is used
to model the underlying distribution that generated
these values. The KDE models, in our case Gaussian
mixture models, are updated at every step by consid-
ering the current model and new samples using the
algorithm presented in the next section. However, af-
ter new samples have been observed, it may turn out
that some other feature would better fit the particu-
lar concept. The system enables such switching be-
tween different features by keeping simplified repre-
sentations of all features. Assuming that the data that
has to be modeled is coarsely normally distributed the
proposed algorithm keeps updating the Gaussian rep-
resentations of all features for every concept being
learned
2
. These updates can be performed without
loss of information. When at some point the algo-
rithm determines that some other feature is to be asso-
ciated with the particular concept, it starts building a
2
In practice, only the representations of a number of po-
tentially interesting features could be maintained.
CONTINUOUS LEARNING OF SIMPLE VISUAL CONCEPTS USING INCREMENTAL KERNEL DENSITY
ESTIMATION
599

new KDE, starting with one component obtained from
the corresponding Gaussian model
3
.
The only question that still remains is how to
select the best feature. The algorithm fulfills the
consistency and specificity criteria mentioned above
by selecting the feature with a distribution that is
most distant from the distributions of the correspond-
ing feature values of all other concepts. The dis-
tances between two distributions are measured us-
ing the Hellinger distance [16]. Note that while the
Hellinger distance can be calculated exactly for two
Gaussians, there is no closed-form solution for Gaus-
sian mixtures. We therefore apply the unscented-
transform (Julier and Uhlmann, 2005) to approxi-
mate the Hellinger distance between two mixtures.
The proposed incremental learning algorithm is pre-
sented
4
in Algorithm 1.
The learned concepts are than used for analysis
of new images. Feature vectors are extracted from
the image and evaluated with a recognition algorithm
that for every concept returns a belief, a value in the
range from 0 to 1. This value is obtained by verifying
how well the value of the feature, which is assigned
to the concept, fits the particular KDE distribution,
i.e., p
(i)
= getBelief(mC
(i)
t
.KDE, f
(mC
(i)
t
.B
). This esti-
mation can be done in different ways; our algorithm
returns the integral over the pdf values that have lower
probability than the current sample.
3 INCREMENTAL ESTIMATION
OF KDE
In the previous section we described the main algo-
rithm for incremental learning of simple visual con-
cepts. Since these concepts are described using ker-
nel density estimates (in our case mixtures of one-
dimensional Gaussians), we present here an approach
to incremental construction of these estimates.
Formally we define a Gaussian-kernel-based
KDE as an M-component mixture of Gaussians
p(x) =
M
∑
j=1
w
j
K
h
j
(x−x
j
), (2)
3
In practice, several KDEs of the most interesting fea-
tures could be maintained.
4
The following notation is used: mC
(i)
represent nc
models of concepts being learned, where mC
(i)
.G
( j)
is a
Gaussian model of the j-th feature and mC
(i)
.KDE is a KDE
model of the best feature (mC
(i)
.B) for the i-th concept. f
is a n f −dimensional training feature vector, c is a list of
the corresponding concept labels. The subscripts t −1 and
t indicate the time step.
Algorithm 1 Main incremental learning algorithm.
Input: mC
(i)
t−1
;i = 1...nc
t−1
, f
t
, c
t
// current models
and current input
Output: mC
(i)
t
,i = 1... nc
t
// updated models
// Update Gaussian models
for i ∈ c
t
do // for all current concept labels
if i /∈mC
t−1
then // previously unencountered
concept
nc
t
= nc
t−1
+ 1 // increase the number of
concepts
init(mC
(i)
t
) // initialize a new concept
else // existing concept
for j = 1.. . nf do // for all features
mC
(i)
t
.G
( j)
= updateG(mC
(i)
t−1
.G
( j)
, f
( j)
t
)
// update Gaussian models
end for
end if
end for
// Select best features
for i = 1...nc
t
do // for all learned concepts
for j = 1.. . nf do // for all features
d
i j
=
∑
nc
t
k=1
d
Hel
(pd f 1, pd f 2),
where // calculate Hellinger
distances
pd f 1 =
(
mC
(i)
t
.KDE , if mC
(i)
t
.B = j
mC
(i)
t
.G
( j)
, if mC
(i)
t
.B 6= j
(1)
pd f 2 =
(
mC
(k)
t
.KDE , if mC
(k)
t
.B = j
mC
(k)
t
.G
( j)
, if mC
(k)
t
.B 6= j
end for
mC
(i)
t
.B = argmax
j
d
ij
// determine the best feature
end for
// Update KDE models
for i = 1...nc
t
do // for all learned concepts
if mC
(i)
t
.B 6= mC
(i)
t−1
.B then // new best feature
mC
(i)
t
.KDE = mC
(i)
t
.G
(mC
(i)
t
.B)
// initialize
KDE with corresp. Gaussian
else // still the same best feature
if i ∈ c
t
then // current concept label
mC
(i)
t
.KDE =
updateKDE(mC
(i)
t−1
.KDE, f
(mC
(i)
t
.B)
t
)
using Algorithm 2
else // not current concept label
mC
(i)
t
.KDE = mC
(i)
t−1
.KDE // keep the old
model
end if
end if
end for
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
600
where w
j
is the weight of the j-th component and
K
σ
(x−µ) is a Gaussian kernel
K
σ
(z) = (2πσ
2
)
−1
2
exp(−
1
2
z
2
/σ
2
), (3)
centered at mean µ with standard deviation σ; note
that σ is also known as the bandwidth of the kernel.
Suppose that we observe a set of n
t
samples {x
i
}
i=1:n
t
up to the current time-step t. We seek a kernel density
estimate with kernels of equal bandwidths h
t
ˆp
t
(x;h
t
) =
1
n
t
n
t
∑
i=1
K
h
t
(x−x
i
), (4)
which is as close as possible to the underlying distri-
bution that generated the samples. A classical mea-
sure used to define closeness of the estimator ˆp
t
(x;h
t
)
to the underlying distribution p(x) is the mean inte-
grated squared error (MISE)
MISE = E[ ˆp
t
(x;h
t
) −p(x)]
2
. (5)
Applying a Taylor expansion, assuming a large
sample-set and noting that the kernels in ˆp
t
(x;h
t
)
are Gaussians ((Wand and Jones, 1995), p.19), we
can write the asymptotic MISE (AMISE) between
ˆp
t
(x;h
t
) and p
t
(x) as
AMISE =
1
2
√
π
(h
t
n
t
)
−1
+
1
4
h
4
R(p
00
(x)), (6)
where p
00
(x) is the second derivative of p(x) and
R(p
00
(x)) =
R
p
00
(x)
2
dx. Minimizing AMISE w.r.t.
bandwidth h
t
gives AMISE-optimal bandwidth
h
tAMISE
= [
1
2
√
πR(p
00
(x))n
t
]
1
5
. (7)
Note that (7) cannot be calculated exactly since it
depends on the second derivative of p(x), and p(x)
is exactly the unknown distribution we are trying to
approximate. Several approaches to approximating
R(p
00
(x)) have been proposed in the literature (see e.g.
(Wand and Jones, 1995)), however these require ac-
cess to all observed samples, which forgoes the pos-
sibility of incremental learning where we wish to dis-
card previous samples and retain only compact rep-
resentations of them. Thus in our setting we have to
estimate the bandwidth of the kernel corresponding to
the incoming sample and update the existing density
estimate using that kernel; we propose a plug-in rule
to achieve that.
Let x
t
be the currently observed sample and let
ˆp
t−1
(x) be an approximation to the underlying distri-
bution p(x) from the previous time-step. Note that
in incremental learning we compress the estimated
distributions once in a while to maintain low com-
plexity (Leonardis and Bischof, 2005). Therefore,
in general, the bandwidths of the kernels in ˆp
t−1
(x)
may vary. The current estimate of p(x) is initial-
ized using the distribution from the previous time-
step ˆp
t
(x) ≈ ˆp
t−1
(x). The bandwidth
ˆ
h
t
of the ker-
nel K
ˆ
h
t
(x−x
t
) corresponding to the current observed
sample x
t
is obtained by approximating the unknown
distribution p(x) ≈ ˆp
t
(x) and applying (7)
ˆ
h
t
= c
scale
[2
√
πR( ˆp
00
t
(x))n
t
]
−1/5
, (8)
where c
scale
is used to increase the bandwidth a lit-
tle and thus avoid undersmoothing. In our experi-
ence, values of the scale parameter c
scale
∈ [1, 1.5] in
(8) give reasonable results and in all our experiments
c
scale
= 1.3 is used. The resulting kernel K
ˆ
h
t
(x −x
t
)
is then combined with ˆp
t−1
(x) into an improved esti-
mate of the unknown distribution
ˆp
t
(x) = (1 −
1
n
t
) ˆp
t−1
(x) +
1
n
t
K
ˆ
h
t
(x−x
t
). (9)
Next, the improved estimate ˆp
t
(x) from (9) is plugged
back in the equation (8) to re-approximate
ˆ
h
t
and thus
equations (8) and (9) are iterated until convergence;
usually, five iterations suffice. The entire procedure is
outlined in Algorithm 2.
Algorithm 2 Incremental density approximation algo-
rithm.
Input: ˆp
t−1
(x), x
t
... the current density approxima-
tion and the new sample
Output: ˆp
t
(x) ... the new approximation of density
1: Initialize the estimate of the current distribution
ˆp
t
(x) ≈ ˆp
t−1
(x).
2: Estimate the bandwidth h
t
of K
ˆ
h
t
(x −x
t
) accord-
ing to (8) using ˆp
t
(x).
3: Reestimate ˆp
t
(x) according to (9) using K
ˆ
h
t
(x −
x
t
).
4: Iterate steps 2 and 3 until convergence.
5: If the number of components in ˆp
t
(x) exceeds a
threshold N
comp
, compress ˆp
t
(x).
4 EXPERIMENTAL RESULTS
In this section we present two sets of experiments,
which were conducted to evaluate the proposed meth-
ods. The aim of the first experiment was to demon-
strate the incremental bandwidth selection method
proposed in Section 3. We generated 1000 samples
from a 1D mixture of Gaussians and a uniform dis-
tribution (Figure 1(a)). These samples were then
used one at a time to incrementally build the ap-
proximation to the original distribution using Algo-
rithm 2. At each time-step two other KDE approxi-
mations were also built for reference: an optimal and
CONTINUOUS LEARNING OF SIMPLE VISUAL CONCEPTS USING INCREMENTAL KERNEL DENSITY
ESTIMATION
601

−1 −0.5 0 0.5 1
0.5
1
1.5
2
200 400 600 800
0
0.1
0.2
0.3
0.4
0.5
0.6
error
Number of samples
200 400 600 800
0.05
0.1
0.15
0.2
0.25
0.3
0.35
bandwidth
Number of samples
Source
Optimal
Our method
Silverman
Optimal
Our method
Silverman
Optimal
Our method
Silverman
(a) (b) (c)
Figure 1: Illustration of Incremental KDE algorithm: (a) final estimated distributions, (b) MISE with respect to the source
distribution, (c) estimated bandwidth.
A
B
A is yellow, small, and circular.
B is blue, large, and square.
A is on the left.
A is near.
B is on the right.
B is far away.
A is to the left of B.
A is closer than B.
A is far from B.
B is to the right of A.
B is further away than A.
B is far from A.
(a) (b)
Figure 2: (a) Input shapes. (b) Training / automatically generated scene description.
a suboptimal. These were batch approximations, and
were thus built by processing all samples observed
up to the given time-step simultaneously. The op-
timal bandwidth was estimated using the solve-the-
equation plug-in method (Jones et. al, 1996), which
is currently theoretically and empirically one of the
most successful bandwidth selection methods. For the
suboptimal bandwidth selection we have chosen Sil-
verman’s rule-of-thumb ((Wand and Jones, 1995), pg.
60), which was also used to initialize our algorithm
from the first two samples.
The results are shown in Figure 1. The final
KDEs, after observing all 1000 samples, estimated by
the proposed incremental method and the two refer-
ence methods, are shown in Figure 1(a). It is clear
that Silverman produced an undersmoothed approx-
imation to the ground-truth distribution. The incre-
mentally constructed KDE and the batch-estimated
KDE using the solve-the-equation plug-in both visu-
ally agree well with the ground-truth. This can be
further quantitatively verified from Figure 1(b) where
we show how the integrated squared error (ISE) be-
tween the three approximations and the ground-truth
was changing as new samples were observed. While
initially errors are high for all three approximations
they decrease as new samples arrive. As expected,
the error of the KDE calculated using Silverman’s
rule remains high even after all 1000 samples have
been observed. On the other hand, the error de-
creases faster for the KDE constructed by the pro-
posed method and comes close to the error of the
optimally selected bandwidth with increasing num-
bers of samples. Note that the optimal bandwidth
was calculated using all samples observed up to a
given step. On the other hand, the proposed incremen-
tal method produced similar bandwidths using only a
low-dimensional representation of the observed sam-
ples (Fig.1(c)).
We evaluated the proposed method for learning
visual concepts in a task that involved learning
concepts of several object properties and spatial
relations using simple objects of basic shapes and of
different colours and sizes (Fig. 2(a)). This image
domain is quite suitable for such analysis, since the
object properties are very diverse and well defined.
The input images contained pairs of objects that
were placed on a table in different configurations.
For every object, we considered ten visual concepts
related to the object’s colour, size and shape (red,
green, blue, yellow; small, large; square, circular,
triangular, and rectangular). Next, we also consid-
ered eleven different spatial relations – six binary
relations between the two objects (with respect to
the observer/camera): ‘to the left of’, ‘to the right
of’, ‘closer than’, ‘further away than’, ‘near to’,
‘far from’, and five unary relations describing the
position of the object in the scene: ‘on the left’, ‘in
the middle’, ‘on the right’, ‘near’, and ‘far away’.
Fig. 2(b) depicts one image with the corresponding
description, which gave two training samples (for
object A and object B). From every training sample
11 features were extracted (three appearance features,
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
602
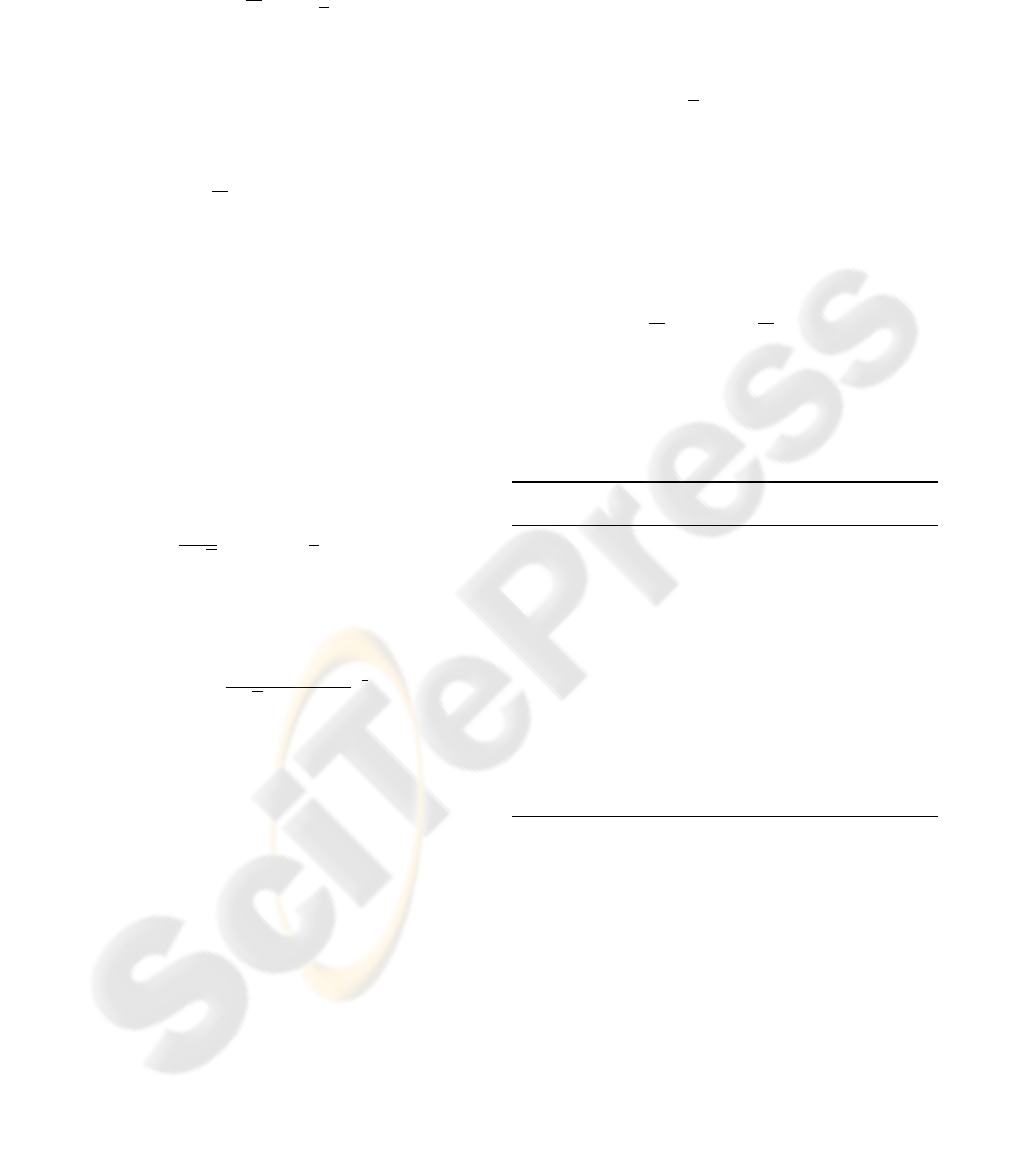
0 50 100 150
0
20
40
60
80
100
no of added samples
accuracy
0 50 100 150
0
5
10
15
20
no of added samples
average number of components
(a) (b)
Figure 3: Experimental results: (a) accuracy. (b) average number of components.
0.32 0.33 0.34 0.35 0.36 0.37
10
20
30
40
50
60
70
Gr
Hu
350 400 450 500 550 600
2
4
6
8
x 10
−3
Lr
Pr
−1000 −500 0 500
2
4
6
8
10
12
14
16
x 10
−4
TL
dx
0 100 200 300 400
1
2
3
4
5
6
7
8
x 10
−3
OL
x
600 700 800 900 1000 1100
1
2
3
4
5
x 10
−3
OR
x
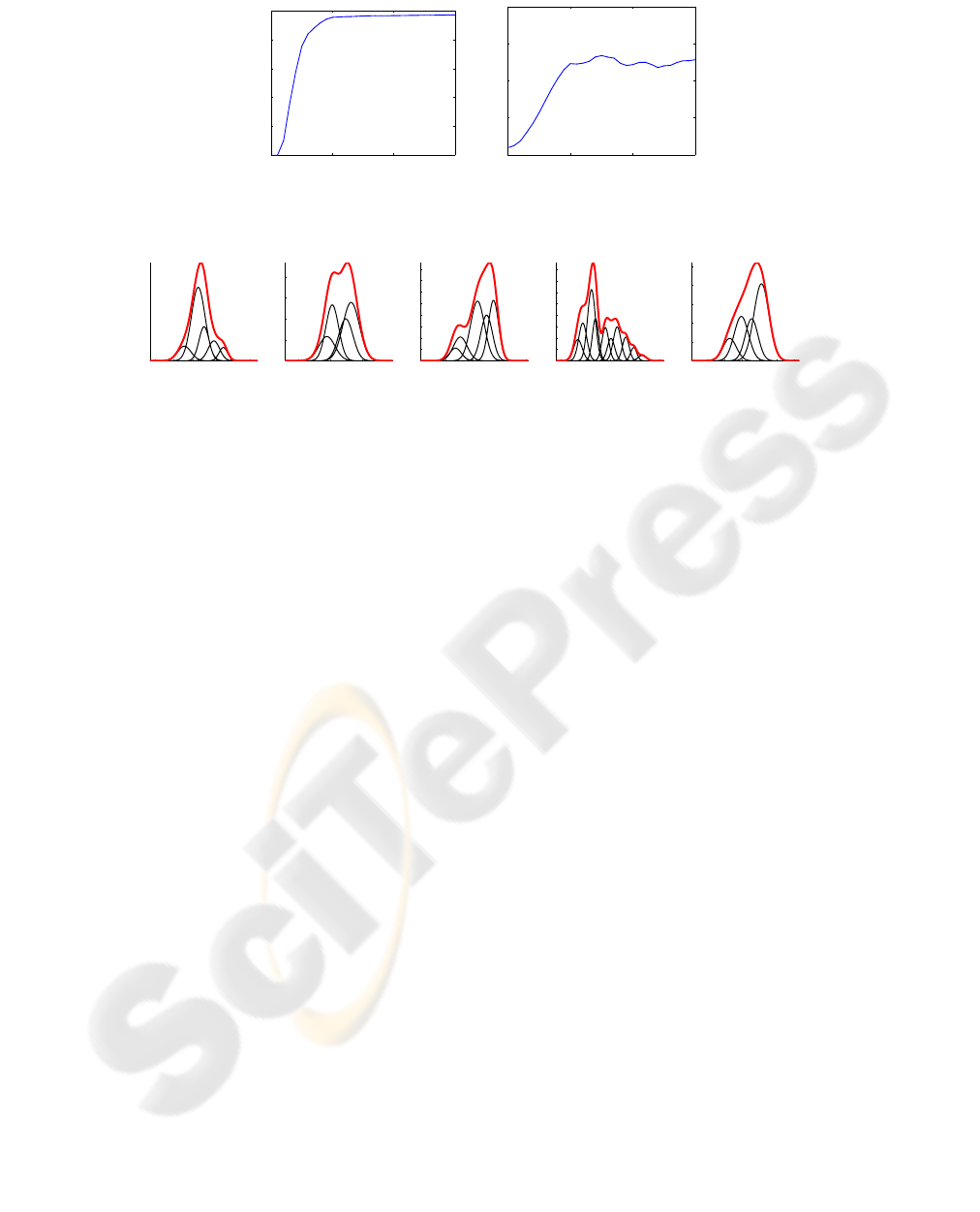
Figure 4: Final models for ‘green’, ‘large’, ‘to the left of’, ‘on the left’, and ‘on the right’.
three shape features, and five distance features),
which were to be associated with 21 visual concepts
being learned.
We randomly divided a set of 300 samples into
two halves consisting of training and test samples
respectively. Then we added training samples one by
one and at each step updated the models of object
properties and spatial relations using the proposed
method. We evaluated the current models by trying
to recognize all training samples and observing the
achieved accuracy. To limit the complexity of the
models, the current KDE was compressed whenever
the number of components exceeded the number 20.
The experiment was repeated 20 times with dif-
ferent sequences of input samples. The average re-
sults are depicted in Fig. 3. From Fig. 3(a) it can be
seen that the overall accuracy increases by adding new
samples. The growth of the accuracy is very rapid at
the beginning when new models of newly introduced
concepts are being added, but still remains positive
even after all models are formed due to refinement
of the corresponding associations and representations.
Fig. 3(b) plots the average number of Gaussian com-
ponents in KDE distributions of all models. One can
observe that after a while this number does not grow
any more, thus the model size remains limited. The
models do not improve by increasing their complex-
ity, but rather due to refinement of the underlying rep-
resentations. Fig. 4 depicts kernel density estimates of
their best features for five concepts at the end of the
learning process. These trained models can be used
for automatic generation of scene descriptions as pre-
sented in Fig. 2(b).
5 CONCLUSIONS
In this paper we proposed a method for continuous
learning of simple visual concepts and applied it to
learning object properties and spatial relations. The
method keeps continuously establishing associations
between automatically extracted visual features and
words describing the observed scenes. The associated
features are modelled with kernel density probability
distribution estimates using the proposed incremental
KDE algorithm.
The proposed method fulfills four requirements
for incremental learning presented in the introduction:
(i) the learning algorithm is able to update the current
representations and create new ones when new con-
cepts occur, (ii) it does not require access to old data
(it uses only their representations), (iii) the represen-
tations are kept compact and do not grow any more
once they reach an adequate complexity, and, con-
sequently (iv) the computational effort needed for a
single update at a given time does not depend on the
amount of data observed up until that time.
The work presented in this paper is a part of a
larger framework for continuous learning of concepts
that we have been developing. We will embed this
algorithm in an interactive setting, where the concept
labels (descriptions of scenes) will be obtained in an
interactive dialogue with the tutor. In this way nega-
tive training examples will also be introduced, which
will enable correction of erroneous updates. The pro-
posed algorithm was tailored to support such opera-
tions. In addition we also plan to extend the proposed
incremental KDE algorithm to multiple dimensions
and to advance the method to handle associations with
CONTINUOUS LEARNING OF SIMPLE VISUAL CONCEPTS USING INCREMENTAL KERNEL DENSITY
ESTIMATION
603

several features, as well as to improve the feature se-
lection method. Our ultimate goal is to develop a gen-
eral, scalable and robust method for continuous learn-
ing of visual concepts.
REFERENCES
Fidler, S., Sko
ˇ
caj, D., Leonardis, A., Combining re-
constructive and discriminative subspace methods for
robust classification and regression by subsampling.
IEEE Transactions on Pattern Analysis and Machine
Intelligence 28 (2006) 337–350
Harnad, S., The symbol grounding problem. Physica D:
Nonlinear Phenomena 42 (1990) 335–346
Ardizzone, E., Chella, A., Frixione, M., Gaglio, S., Inte-
grating subsymbolic and symbolic processing in artifi-
cial vision. Journal of Intelligent Systems 1(4) (1992)
273–308
Roy, D.K., Pentland, A.P., Learning words from sights and
sounds: a computational model. Cognitive Science 26
(2002) 113–146
Roy, D.K., Learning visually-grounded words and syntax
for a scene description task. Computer Speech and
Language 16(3) (2002) 353–385
Vogt, P., The physical symbol grounding problem. Cogni-
tive Systems Research 3 (2002) 429–457
Kirstein, S., Wersing, H., K
¨
orner, E., Rapid online learn-
ing of objects in a biologically motivated recognition
architecture. In: 27th DAGM. (2005) 301–308
Steels, L., Kaplan, F., AIBO’s first words. the social learn-
ing of language and meaning. Evolution of Commu-
nication 4 (2001) 3–32
Arsenio, A., Developmental learning on a humanoid robot.
In: IEEE International Joint Conference On Neural
Networks. (2004) 3167–3172
Wand, M.P., Jones, M.C., Kernel Smoothing. Chapman &
Hall/CRC (1995)
Elgammal, A., Duraiswami, R., Harwood, D., Davis, L.,
Background and foreground modeling using nonpara-
metric kernel density estimation for visual surveil-
lance. In: Proceedings of the IEEE. (2002) 1151–
1163
Han, B., Comaniciu, D., Davis, L., Sequential density ap-
proximation through mode propagation: Applications
to background modeling. In: Asian Conf. Computer
Vision. (2004)
Arandjelovic, O., Cipolla, R., Incremental learning of
temporally-coherent gaussian mixture models. In:
British Machine Vision Conference. (2005) 759–768
Song, M., Wang, H., Highly efficient incremental estima-
tion of gaussian mixture models for online data stream
clustering. In: SPIE: Intelligent Computing: Theory
and Applications. (2005) 174–183
Szewczyk, W.F., Time-evolving adaptive mixtures. Techni-
cal report, National Security Agency (2005)
Julier, S., Uhlmann, J., A general method for approximating
nonlinear transformations of probability distributions.
Technical report, Department of Engineering Science,
University of Oxford (1996)
Leonardis, A., Bischof, H., An efficient MDL-based
construction of RBF networks. Neural Networks
11(1998) 963 – 973
Jones, M.C., Marron, J.S., Sheather, S.J., A brief survey of
bandwidth selection for density estimation. J. Amer.
Stat. Assoc. 91 (1996) 401–407
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
604
