
EVOLVING ROI CODING IN H.264 SVC
Syeda Shamikha F. Shah and Eran A. Edirisinge
Loughborough University, Leicestershire LE11 3TU, UK
Keywords: SVC, ROI, Motion Estimation, Video Surveillance.
Abstract: Region-of-Interest (ROI) based coding is an integral feature of most image/video coding
techniques/standards and has im-portant applications in content based video coding, storage and
transmission. However, in the latest scalable extension of H.264 AVC video coding standard, i.e. H.264
SVC, motion estimation across the slice group boundaries does not preserve the coding quality and
compression rate of the ROI. In this paper novel enhancements to the ROI based coding for H.264 SVC
have been proposed to constrain the inter frame prediction across slice group boundaries. We show that the
proposed algorithms do not negatively affect the rate-distortion performance of the coded video, but provide
useful additional functionality that enables the extended use of the standard in many new application
domains. Further, we pro-pose a method for supporting the coding of moving ROI in the scalable video
coding domain, by adaptively changing the shape, size and position of the slice groups. We show that this
additional functionality is particularly useful in video surveil-lance applications to effectively compress and
transmit the ROI and reduce the storage and transmission requirements without any quality degradation of
the ROI.
1 INTRODUCTION
The Scalable extension of H.264-AVC, i.e. H.264
SVC addresses the challenges of supporting
heterogeneous users linked over heterogeneous
networks. Each user might have different
requirements and constraints. This includes different
screen resolution or different QOS requirement of
the application. Similarly, the condition of the
network is not a constant factor owing to congestion
and fluctuation of bandwidth. SVC provides the
flexible encoding to cater to these changing
requirements (Ziliani and Michelou, 2005). The
application areas of Scalable video coding include
digital video surveillance and network applications.
The scalable standard should be able to discard parts
of the video bit stream to meet channel requirements
and provide better compression and performance
efficiency (Mark et al., 2002).
ROI based coding is an important topic in video
coding. A considerable amount of research has been
carried out on enhancing the ROI coding as well as
adapting it to the scalability domain. Some problems
encountered in enabling ROI based coding, such as
carrying out motion compensation and intra coding
of macroblocks have been highlighted in Wang and
Hannuksela, 2002. Bae et al., 2006 takes it on
further and addresses the issues related to coding
ROI in scalable mode. It shows how to overcome the
problems posed by the dependency between slice
groups (ROI) in intra-prediction, motion estimation,
half-sample interpolation on the slice group
boundary and upsampling in intra-base mode on the
slice group boundary. It further suggests that the
dependency between slice groups for motion
estimation should be resolved by implementing
constrained motion estimation.
The importance of limiting the inter prediction
across slice group boundary has been realized by the
H.264 SVC standard (Wiegand et al., 2006) by
introducing the motion constrained SEI message.
This message signals to the decoder that the samples
from a given set of slice groups shall not refer to
samples outside this set. The encoder shall provide
the functionality to limit this reference and so should
the decoder.
In this paper, novel techniques to restrict the
motion estimation across slice group boundaries at
the encoder have been proposed. These techniques
do not require the transmission of the motion
constrained SEI or any special handling at the
decoder. Constrained inter-frame prediction across
slice group boundaries is important for the
13
Shamikha F. Shah S. and A. Edirisinge E. (2008).
EVOLVING ROI CODING IN H.264 SVC.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 13-19
DOI: 10.5220/0001085200130019
Copyright
c
SciTePress

independent decoding of ROI and preserving its
coding quality.
A further issue with ROI coding is the change in
the shape, size and position of the ROI. (Wang and
Hannuksela, 2002) proposes ways to code evolving
ROI, that is, the shape of the isolated region
grows/evolves with time. FMO map type 3, 4 and 5
provide the feature of growing and evolving slice
groups. However, these map types do not cater to a
moving slice group. The slice group can grow from
its initial position but not change shape, or move
horizontally or vertically across the frames.
Therefore, these map types cannot be used for
implementing moving ROI and special handling
needs to be provided for changing/moving slice
groups. In light of the above observations and
practical significance, support for moving ROI in
H.264 SVC has been proposed in this paper.
The rest of the paper is organized as follows.
Section 2 describes the proposed algorithms for
constrained inter frame prediction across slice group
boundaries. Changing slice groups (moving ROI)
feature is presented in Section 3. Section 4 provides
the experimental results and their analysis. The
conclusion to this research is drawn in Section 5
with suggestions for future work.
2 CONSTRAINED INTER FRAME
PREDICTION
Constrained inter prediction across the slice group
boundary is a useful functionality to allow for
independent decoding of slice groups, and hence the
ROI. The independent ROI decoding can increase
the error resilience by limiting the motion search for
the ROI to the same slice group in the reference
pictures. It will restrict motion compensation from
slice groups coded at lower quality. Restricted
motion compensation, in turn, maintains the
compression quality of different slice groups. A slice
group that is coded at a lower compression rate
would maintain its quality by not referring to the
samples that are outside this slice group and are
possibly coded with higher compression.
Three different techniques to constrain the inter
prediction across slice groups boundaries are
proposed as follows.
2.1 Boundary Padding of Non-ROI
The proposed method to restrict the inter-frame
prediction across slice group boundaries is to
eliminate the possibility of any sample in one slice
group finding its best match from the other slice
group. This can be done by padding the boundaries
of the ‘non-current’ (current slice group being the
one for whose samples, a best match is being found)
slice group.
The size of padding should be equal in width to
the minimum of search range specified in the
encoder configuration and the width of ‘non-current’
slice group. The value with which this region is
padded should be some value other than a
permissible pixel sample value (both luma and
chroma). This padding shall be applied to all
reference pictures used for inter prediction, and not
the current picture. The interpolation process for the
reference frame, for creating half pixel accurate and
quarter pixel accurate sample buffers, shall be
carried out after the padding.
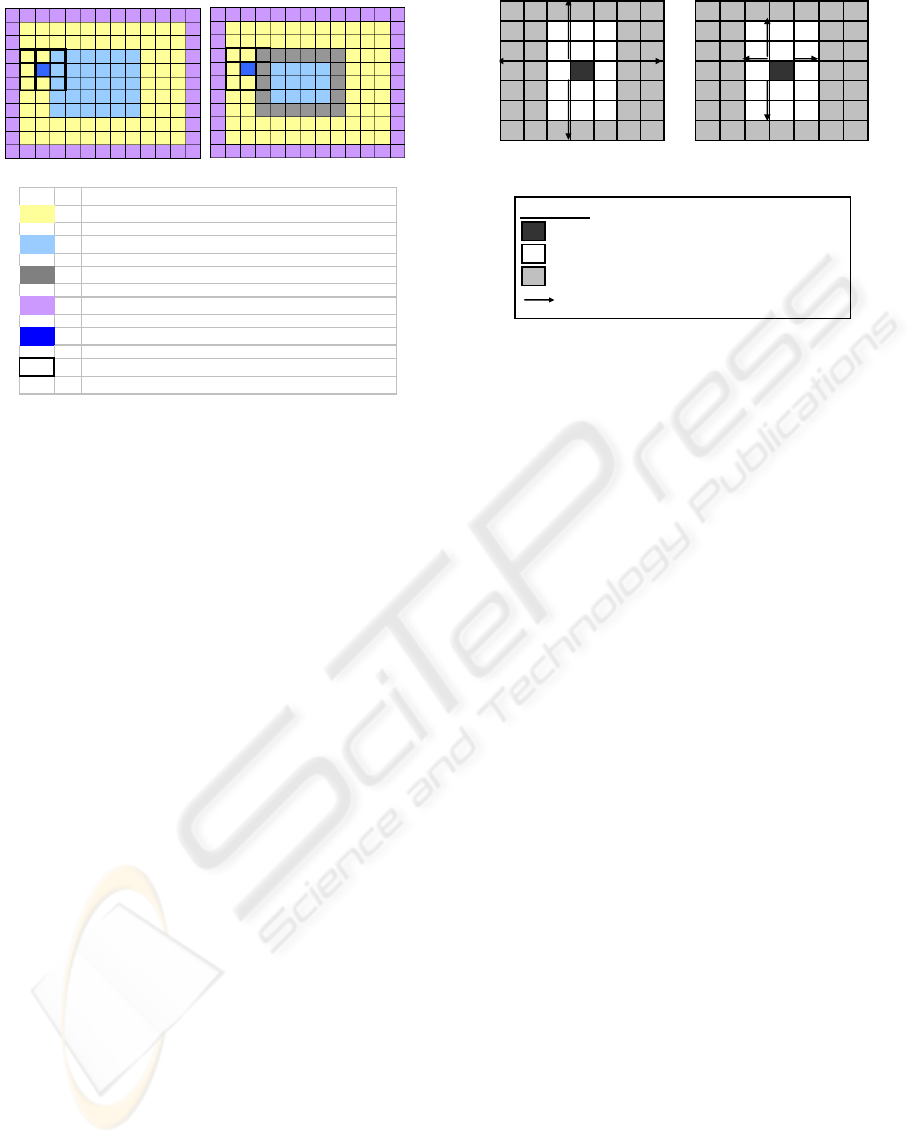
Figure 1 illustrates the padding process. In figure
1(b), the macroblocks from slice group B are padded
with an undefined value. Although they fall inside
the search range of the current macroblock, their
undefined value cannot provide a match for this
macroblock. Based on the implementation it is
possible to restrict the motion vectors of just one
slice group or multiple slice groups. The one draw
back of this technique is that if the reference frames
are padded only once and used for all slice groups,
then the padded slice group can effect the motion
estimation of its own samples.This is because the
padded area would become ‘inaccessible’ to the
padded slice group as well. A way to solve this can
be to pad the reference frames for each slice group
separately.
2.2 Limiting the Search Rectangle
Constrained inter prediction can be implemented by
redefining the search range for each macroblock
according to its position in the slice group. In this
algorithm, the search range of the current
macroblock is defined in a way that the rows and
columns of macroblocks belonging to other slice
groups are excluded from the search rectangle of the
current macroblock. The technique is illustrated in
figure 2.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
14
(a) (b)
Legend
Slice Group A
Slice Group B
Padding of Slice Group B
Picture Boundary Padding
Current Macroblock
Search Rectangle
Search Range = 16 pixels = 1 macroblock.
Figure 1: Padding slice group inner boundary (a) without
padding (b) with padding.
The implementation requires the initialization of
the macroblock for motion compensation to be
changed. This technique is ideally suited to restrict
inter-frame prediction for the foreground slice group
in FMO map type 2.
2.3 Constrained Inter-frame Prediction
at MB and Sub-MB Level
This technique involves restricting the motion
vectors of each macroblock to point inside the slice
group to which it belongs. This restriction has to be
implemented in the form of checks at the
macroblock and sub macroblock level, so that
neither the 16x16 macroblock, nor any of its
partitions have the motion vector pointing outside.
Further, the restriction should be active for both full
pel motion vectors and sub pel motion vectors.
The following algorithm is designed to check if
the motion vector points to a macroblock or
macroblock partition that belongs to the current slice
group. If so, the motion vector is valid, otherwise
this motion vector shall not be used in the motion
estimation process.
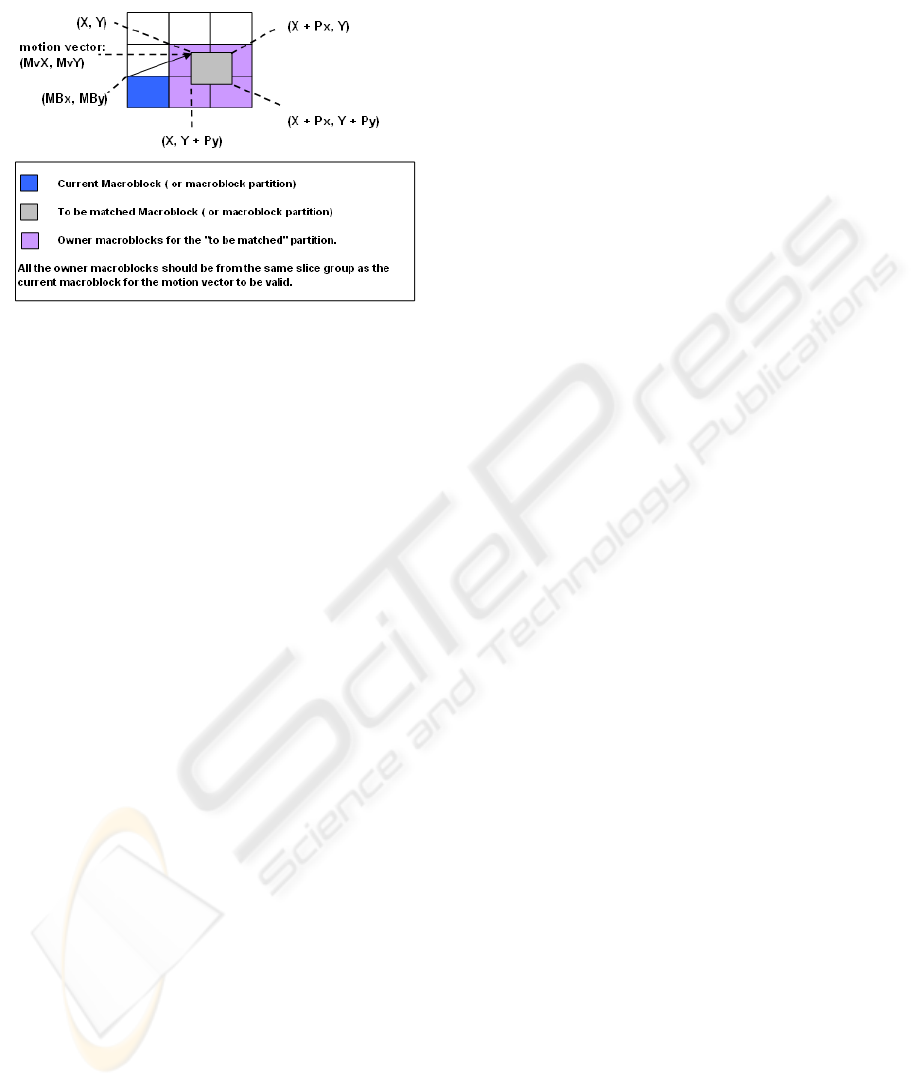
• Let the Motion Vector (Mv) to be checked be
(MvX, MvY).
• Let the partition size of the partition for
which the motion is being estimated be Px
(width) and Py (height).
• Let the coordinates of the current macroblock
(MB) be (MBx, MBy).
(a) (b)
Legend:
Current Macroblock (Foreground)
Foreground
Background
Search range
Figure 2: Limiting search rectangle (a) original search
range (b) limited search range.
Step 1: The starting coordinates (X, Y) of the
partition to be checked for best match, by calculating
the SAD with the current macroblock partition, are
derived as:
X = MBx + MvX
Y = MBy + MvY
Step 2: Determine the coordinates of the pixels
that mark the four corners of the partition to be
checked to give the best match.
• (X + Px, Y)
• (X, Y + Px)
• (X + Px, Y + Px)
• (X , Y)
The x and y coordinates of any of these pixels,
that is calculated to be lying outside the picture
boundary should be clipped to the nearest boundary
coordinate.
• x = min ( 0, max (x, picture width in pixels ))
• y = min ( 0, max (y, picture height in pixels))
Note that by doing so, the padded area outside
the pixel boundary is mapped to a macroblock
closest to the padded area but lying inside the
boundary. Thus the slice group of this part of padded
region would be inferred as the slice group of the
closest boundary macroblock.
Step 3: The owner macroblocks of the four
pixels, as given in step 2, shall be determined. If all
of these owner macroblocks belong to the same slice
group as the current macroblock, then the motion
vector is valid, otherwise it is invalid.
Usage of the algorithm. The algorithm given above
is used in the motion estimation process for
EVOLVING ROI CODING IN H.264 SVC
15
restricting the motion vectors to the current slice
group.
Figure 3: Determine valid motion vector.
Motion estimation process picks the predicted
motion vector as the first best estimate for refining
the motion vector. However, even when the
predictor blocks belong to the current slice group,
their motion vectors when translated to the current
macroblock may point outside the slice group.
Therefore the validity of the motion vector should be
checked by using the proposed algorithm.
The motion estimation of the macroblock and its
partitions, by zero vector and tree search
(hierarchical search), shall also be restricted by
applying the algorithm.
Moreover, this algorithm shall also be used in
sub-pel motion estimation. The sub pixel motion
estimation involves the half pel and quarter pel
interpolation. As the first step towards determining
if the motion vector points to a macroblock inside
the current slice group, the macroblock to which the
sub pel would belong should be identified. After the
mapping from sub-pel to full pel, the validity of the
motion vector shall be determined.
This technique is applicable to both the
rectangular slice groups (FMO map type 2) and
arbitrary shaped slice groups (FMO map type 6).
Moreover, it inter predicts each slice group
independently of the other, and is not restricted by
the number of slice groups in all.
3 CHANGING SLICE GROUPS
(MOVING ROI)
The FMO functionality in the SVC standard allows
defining multiple slice groups in the frame. In the
case of FMO type 2, the foreground slice group can
be selected as the ROI. However this selection is
fixed for the entire video sequence. In real life
applications, the object constituting the ROI changes
its position with time. This calls for updating the
place and shape of the ROI from time to time.
The support for changing slice groups/ROI, as
proposed in this paper, allows changing the ROI
definition at the encoder. The relevant information is
transmitted to the decoder in time to decode the
changing slice groups. The changes are transparent
to the decoder. Furthermore, it preserves the
encoded quality of each slice group as ensured
through constrained motion estimation techniques.
The following steps are involved in
implementing changing slice groups.
3.1 Slice Group Map Redefinition per
GOP
The slice group definitions for the video sequence
are provided to the SVC encoder as the
configuration parameters. The encoder subsequently
generates the macroblock to slice group mapping for
the entire video sequence, once it starts encoding the
sequence. In order to redefine a slice group, the
corresponding FMO parameters should be changed.
The new parameters, such as the starting and ending
MB for the ROI, should correspond to the updated
size, position and shape of the ROI. These
parameters can be obtained by repeated ROI
identification per GOP, through some computer
vision algorithm.
Following the parameter change, the FMO unit
shall be reinitialized to construct the macroblock to
slice group map according to the new definition of
the slice groups. The frequency of changing the slice
group can be as high as per frame. However, this
increases the computation cost of the encoder. Thus
it is advisable to change the slice group mapping
once per group of pictures (GOP).
3.2 Reference Slice Group Map for
Motion Estimation
In the reference SVC encoder (JSVM 8.13), one
slice group map is used for all the frames of the
video sequence. The constrained motion estimation
process refers to the slice group map to find the slice
group of a macroblock. This is to ensure that the best
match macroblock is only picked up from the same
slice group as the current macroblock.
When the moving ROI functionality is
implemented, the slice group map changes every
GOP. Since the key frame from the previous GOP is
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
16
used in the motion estimation process for the frames
of the current GOP, the need to have the current as
well as the old slice group mapping is essential. For
this reason, the slice group map is stored with each
frame. A macroblock from the reference frame is
selected as the best match only if it lies in the same
slice group according to the slice group map of the
reference frame.
3.3 Picture Parameter Set Update and
Transmission
The FMO parameters, which include the first MB in
a slice and the number of macroblocks in the slice
are transmitted by the encoder in the slice header.
However, the macroblock to slice group map is
communicated to the decoder in the picture
parameter set. Therefore, for moving ROI, the
picture parameter set NAL unit is updated and
transmitted by the encoder every time the slice
group mapping is changed.
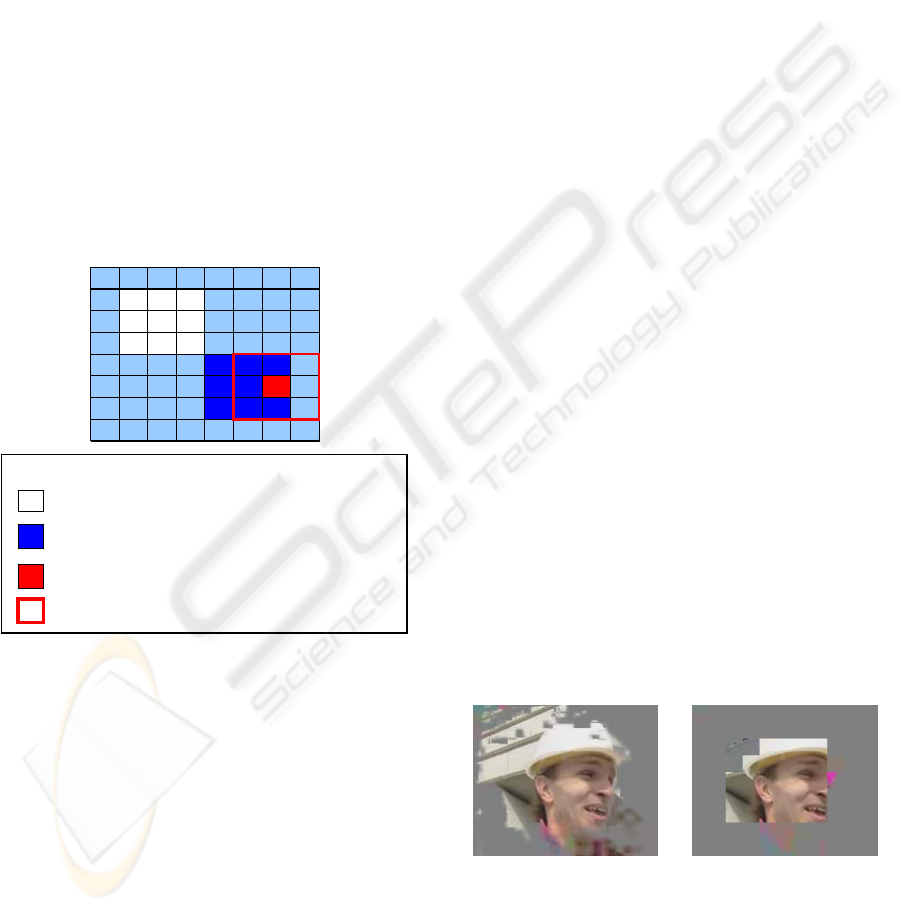
Legend:
Foreground Slice group in reference Frame
Foreground Slice group in current Frame
Current Macroblock for ME
Search Window around zero vector for current MB
Figure 4: Non overlapping search window of current MB
with foreground SG in reference frame.
3.4 Increase in Search Range
The constrained motion estimation process considers
a macroblock in the reference frame as the best
match if it belongs to the same slice as the current
macroblock. Changing slice groups implies that the
slice group definition in the reference picture may be
different from that in the current picture. In the case
when the motion between the GOPs is fast, it is
possible that the search window for a macroblock
may not overlap with the slice group mapping of its
owner slice group in the reference frame. This is
illustrated in figure 4.
In this case, no macroblock in the reference
frame will fulfill the criteria that it belongs to the
same slice group as the current macroblock. For this
reason, even a macroblock with otherwise a very
low SAD, will not be selected to estimate motion of
the current macroblock, since this would be a
compromise to the coding quality of the ROI and
violate the principles of constrained motion
estimation. To resolve this issue, the search range in
the configuration parameters shall be increased. The
increased search range would be effective for all the
macroblocks in the entire video sequence.
4 EXPERIMENTAL RESULTS
The algorithms for constrained inter-frame
prediction and the support for moving ROI has been
implemented on JSVM reference software (version
8.13).
4.1 Constrained Inter-frame Prediction
In the experiments, Football and Foreman video
sequences were coded with 2 slice groups defined
using FMO map type 2. Constrained inter-frame
prediction at MB and sub-MB level was tested for
FMO map type 6 as well. Skip mode and Direct
mode for motion estimation were not enabled for the
constrained inter-frame prediction at MB and sub
MB level. The loop filter was disabled for the
experiments. Different QP values were set for the
two slice groups. One of the slice groups is coded
with QP value greater than 52. This is to make the
distinction between the two slice groups visually
apparent for testing purposes. The algorithms have
been tested for two spatial layers (QCIF and CIF).
(a) (b)
Figure 5: Decoded frame (Foreman QCIF) (a) without
constrained inter frame prediction (b) with boundary
padding of non-ROI (ROI in grey).
EVOLVING ROI CODING IN H.264 SVC
17

(a) (b)
Figure 6: Decoded frame (Foreman QCIF) (a) without
constrained inter-frame prediction (b) with limiting the
search rectangle for ROI (ROI in grey).
(a) (b)
Figure 7: frame (Foreman QCIF) (a) without constrained
inter-frame prediction (b) with constrained inter-frame
prediction at MB and sub MB level.
Without constrained inter-frame prediction, the
samples from one slice groups are compensating
motion for the other slice group and hence no
distinct boundary is seen for P or B frames. This
distinction in quality is present with constrained
inter-frame prediction.
4.1.1 Effect on Bitrate and PSNR
The PSNR and bitrate values were obtained on
constrained inter-frame prediction at MB and sub
MB level encoded with two spatial layers. It is
observed that there is no significant difference in
PSNR with or without the constrained ME.
Therefore we conclude that the constrained ME
technique does not effect the overall quality of the
sequence.
Experiments were conducted for bitrate on
foreman and foreground test sequences with the two
slice groups coded with a base QP of 8 and 48
respectively. The experiments show a decrease in
the bitrate. However, for some values of QP and QP
difference between the two slice groups, the bitrate
may increase. This is because the bitrate is a balance
between the bits used to encode the error and the bits
used to encode the motion vector. With constrained
motion estimation, the magnitude of motion vector
is reduced, since it is constrained to the same slice
group. However, the error increases with the
constrained ME, since the best match is forced to be
selected from within the same slice group, which
otherwise could have existed somewhere outside the
slice group.
The magnitude of error as well as that of motion
vector also depends on the size of the slice groups
and the degree of motion between frames. Hence the
effect on bitrate is controlled by all these factors.
4.1.2 Computational Complexity
The constrained inter-frame prediction techniques
were implemented without any hardware
accelerator. No special emphasis was given to
optimized implementation of these techniques. The
computation time of the Constrained Inter Frame
Prediction techniques was computed using Intel®
VTune™ Performance Analyzer 8.0 for windows.
The computation time was calculated on both fast
motion sequence (football) and slower motion
sequence (foreman) with one and two spatial layers.
The technique with boundary padding of non-
ROI shows an increase in computation time of
roughly 23% for foreman and 7 to 10% for football.
Constrained inter-frame prediction at MB and sub-
MB level causes an increase of 32% for both test
sequences. A decrease of about 6% in computation
time is observed for constrained inter-frame
prediction by limiting the search rectangle.
4.2 Changing Slice Groups (Moving
ROI)
The support for moving ROI has been implemented
on JSVM (version 8.13). Experiments were
conducted on Foreman and Bus video sequence.
Testing was done with and without spatial
scalability. The loop filter was disabled for the
experiment.
The ROI was selected using FMO map type 2,
with the foreground slice group compressed with a
lower QP then the background slice group. The basic
QP for foreground slice group is set to 25 and as for
the background slice group, it is set to a much higher
value (out of range value to effectively nullify the
background).
ROI identification per GOP was done by
integrating the JSVM software with Intel OpenCV
(version 1.0) Library.
The results show effective coding of ROI with
change in position, size and rectangular shape across
GOPs.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
18

(a) 1
st
frame of 1
st
GOP (b) Middle frame of 2
nd
GOP
(c) Middle frame of 3
rd
GOP (d) Middle frame of 4
rd
GOP
Figure 8: Decoded frames of BUS test sequence (QCIF).
5 CONCLUSIONS
In this paper, three novel algorithms for constraint
inter frame prediction have been proposed. The
implementation of constrained inter-frame
prediction algorithms on H.264 SVC reference
encoder (version 8.13) gives encouraging results.
There is no significant negative impact on the PSNR
or bitrate of the coded video for carefully selected
quantization parameter values. The computational
complexity of the proposed techniques is high, and
can be reduced in part by optimized implementation
in software or more effectively; through hardware
acceleration.
The paper also proposes the technique to support
changing slice groups (moving ROI) in H.264 SVC.
The technique, as implemented on JSVM (version
8.13), has been verified for both fast and slow
moving video sequences. The results show effective
encoding and decoding of the video sequence with
ROI of changing shape, size and position.
REFERENCES
Ziliani F. and Michelou, J. (VisioWave), “Scalable video
coding in digital video security”, VisioWave, SA,
2005.
Mrak, M., et al., “Scalable video coding in network
applications”, VIPromCom-2002, 4th EURASIP-IEEE
region 8 international Symposium on Video/Image
processing and multimedia communications, Zadar,
Croatia, June 2002.
Ye-Kui Wang and Hannuksela, M.H., “Isolated Regions:
Motivation, Problems, and Solutions”, Input
Document to JVT, JVT 3rd Meeting, Fairfax, Virginia,
USA, Document #JVT-C072, May 2002.
Bae, T.M., et al., “Multiple Region-of-Interest Support in
Scalable Video Coding”, ETRI Journal, Vol. 28,
Number 2, April 2006.
Wiegand, T. et al., Joint Draft 6, JVT 19
th
Meeting,
Geneva, Switzerland, Document #JVT-S201, April
2006.
EVOLVING ROI CODING IN H.264 SVC
19
