
MEAN SHIFT SEGMENTATION
Evaluation of Optimization Techniques
Jens N. Kaftan, Andr
´
e A. Bell and Til Aach
Institute of Imaging and Computer Vision, RWTH Aachen University, Templergraben 55, 52056 Aachen, Germany
Keywords:
Mean shift, segmentation, optimization, evaluation.
Abstract:
The mean shift algorithm is a powerful clustering technique, which is based on an iterative scheme to detect
modes in a probability density function. It has been utilized for image segmentation by seeking the modes in
a feature space composed of spatial and color information.
Although the modes of the feature space can be efficiently calculated in that scheme, different optimization
techniques have been investigated to further improve the calculation speed. Besides those techniques that
improve the efficiency using specialized data structures, there are other ones, which take advantage of some
heuristics, and therefore affect the accuracy of the algorithm output.
In this paper we discuss and evaluate different optimization strategies for mean shift based image segmen-
tation. These optimization techniques are quantitatively evaluated based on different real world images. We
compare segmentation results of heuristic-based, performance-optimized implementations with the segmen-
tation result of the original mean shift algorithm as a gold standard. Towards this end, we utilize different
partition distance measures, by identifying corresponding regions and analyzing the thus revealed differences.
1 INTRODUCTION
Image segmentation plays a crucial role in various
image processing applications in several domains, in-
cluding industrial as well as medical applications. It
describes the task of partitioning an image into sev-
eral segments or regions. Common segmentation ap-
proaches include simple thresholding techniques (Hu
et al., 2006), graph-based methods (Grady, 2006),
and level set techniques (Sethian, 1999) among oth-
ers. They have been applied to images from different
imaging modalities in typically two or three dimen-
sions, e.g., gray/color images, high dynamic range
images, CT/MR datasets, and multispectral images.
In general, these methods are adapted to the specific
application.
Mean shift is an unsupervised clustering algorithm
(Fukunaga and Hostetler, 1975), which estimates the
gradient of a probability density function to detect
modes in an iterative fashion. Hence, image segmen-
tations that take color/intensity-similarity as well as
local connectivity into account, can be obtained by
applying this algorithm to the combined spatial-range
domain (Comaniciu and Meer, 1997). Mean shift seg-
mentation has been successfully applied to several ap-
plications (Comaniciu and Meer, 1999; Suri et al.,
2002; Bell et al., 2006).
However, for larger images or applications where
processing time is very crucial, the mean shift seg-
mentation algorithm might be still too time consum-
ing. Based on the EDISON framework (Christoudias
et al., 2002; Comaniciu and Meer, 2002) we sum-
marize different optimization techniques for mean
shift based image segmentation. Given an applica-
tion for which the mean shift algorithm has proven
to be effective, one might now ask how these op-
timization techniques influence the segmentation re-
sults. Especially heuristic-based optimization tech-
niques alter the segmentation result and might affect
the applicability of the algorithm to the specific ap-
plication. Hence, we evaluate the segmentation re-
sults of performance-optimized compared to the non-
performance-optimized mean shift algorithm.
The paper is organized as follows. In Section 2 we
recapitulate the theoretical background of the mean
shift procedure. Subsequently, we present different
performance optimization techniques in Section 3. To
evaluate these heuristic-based performance optimiza-
tions with respect to the non-performance-optimized
mean shift segmentation we derive evaluation meth-
365
Kaftan J., Bell A. and Aach T. (2008).
MEAN SHIFT SEGMENTATION - Evaluation of Optimization Techniques.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 365-374
DOI: 10.5220/0001085003650374
Copyright
c
SciTePress

ods in Section 4. Consequently, we apply these eval-
uation methods to several different image databases
and give numerical results in Section 5. Finally, we
conclude our results in Section 6.
2 THEORY
The mean shift algorithm (Fukunaga and Hostetler,
1975; Cheng, 1995) can be applied to a variety of
applications, including clustering, segmentation, and
filtering (Comaniciu and Meer, 1997; Comaniciu and
Meer, 2002) and provides consistently good results
(Figure 1). The mean shift technique detects modes
in a probability density function based on the Parzen
Density Estimate (Fukunaga and Hostetler, 1975):
ˆ
f
K
S
(x) =
1
Nh
d
N
∑
i=1
K
S
x − x
i
h
(1)
Here, N equals the number of d-dimensional vec-
tors x
1
..x
N
. The parameter h is the window radius
of the used kernel K
S
. In the domain of image seg-
mentation each feature vector is composed of the spa-
tial information of each pixel and the corresponding
color/intensity information in the range domain of di-
mension one or more.
The multivariate mean shift vector in the point x
is given by (Comaniciu and Meer, 2002)
m
K
(x) =
N
∑
i=1
x
i
K
x−x
i
h
N
∑
i=1
K
x−x
i
h
− x (2)
For the uniform kernel K
U
the calculation of the mean
shift vector (2) thus becomes an average of vector dif-
ferences. It can be shown that the mean shift vector
then is proportional to the normalized density gradi-
ent estimate (Comaniciu and Meer, 2002)
m
K
(x) =
1
2
h
2
c
∇
ˆ
f
K
E
(x)
ˆ
f
K
U
(x)
(3)
where c is the corresponding normalization constant
and K
E
is the radially symmetric Epanechnikov kernel
given by
K
E
(x) =
(
1
2
c
−1
d
(d + 2)(1 −
k
x
k
2
)
k
x
k
≤ 1
0 otherwise
(4)
with c
d
being a normalization constant.
To ensure the isotropy of the feature space, a uni-
form color space, such as the L
∗
u
∗
v
∗
is typically used.
In the case of grayvalue images, the L
∗
component is
used only. To account for different spatial and tonal
(a) Original (b) Mean shift segmented
Figure 1: Cameraman image. (a) Original. (b) Mean
shift segmented using high speedup level with (h
s
, h
r
) =
(32, 16).
variances it is reasonable to choose a kernel window
of size S
h
= S
h
s
,h
r
with differing radii h
s
in the spatial
and h
r
in the range domain.
Since the mean shift vector is designed to be
aligned with the local gradient estimate, it can be
shown that by successive computation of (2) and shift-
ing the kernel window by m
K
(x), the mean shift pro-
cedure is guaranteed to converge to a point with zero
gradient, i.e., to a mode corresponding to the initial
position. Modes that are closer than h
s
and h
r
are
grouped together. For segmentation purposes, to each
pixel is then assigned the color/intensity value of the
corresponding mode. Furthermore, regions with less
than some pixelcount M might be optionally elimi-
nated.
The mean shift procedure is hence an effective
algorithm for mode seeking in a density distribution
without prior calculation of the distribution itself.
3 OPTIMIZATION TECHNIQUES
Although the mean shift vector can be calculated ef-
ficiently by just averaging the differences between
the current feature vector x and all feature vectors
within a certain space S
h
(x) around x, it is still ex-
pensive to identify the feature vectors falling into this
space for each mean shift vector calculation. This
problem is known as multidimensional range search-
ing (Georgescu et al., 2003).
Different performance optimizations have been
realized in the past. These mean shift variants reduce
computational time either by accelerating the calcula-
tion of one mean shift vector (category I) or by reduc-
ing the number of necessary mean shift vector cal-
culations (category II) or by combining both. Opti-
mizations that speed up the mean shift vector calcu-
lation often take advantage of specialized data struc-
tures and therefore do not affect the segmentation re-
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
366

sult. Methods that reduce the number of necessary
mean shift vector calculations, however, usually use
heuristics, and therefore influence the quality of the
segmentation outcome.
For the Gaussian mean shift four different accel-
eration strategies have been examined in (Carreira-
Perpinan, 2006). The best speedup performance was
achieved by a spatial discretization step, which is very
similar to the mean shift vector reutilization technique
described in Section 3.2. With an optimal parameter
choice a speedup of factor 10x − 100x was achieved
with an error P < 3% (number of misclustered pixels
divided by the total number of pixels within the im-
age). Note that the Gaussian mean shift segmentation
is initially far slower to converge than the one using
the Epanechnikov kernel.
Based on the EDISON framework (Christoudias
et al., 2002; Comaniciu and Meer, 2002) that realizes
different mean shift optimizations using the Epanech-
nikov kernel, we detail these optimization techniques
in the following, which have also been shortly men-
tioned in (Christoudias et al., 2002).
While basic implementations of the mean shift
procedure usually work on the regular lattice struc-
ture of the image, one can improve the performance
utilizing an optimized ”bucket” structure that we de-
scribe in Section 3.1. This optimization of cate-
gory I significantly increases the computational per-
formance without influencing the segmentation result.
Furthermore, we present two optimizations of cate-
gory II with medium (Section 3.2) and high (Sec-
tion 3.3) speedup level, respectively. Using all pos-
sible combinations - two realizations of category I
(lattice and bucket structure) × three of category II
(non-optimized (as described in Section 2), medium
speedup level, and high speedup level) - this sums up
to six different realizations.
3.1 Bucket Data Structure
One bottleneck of the mean shift procedure is the cost
per iteration, i.e., the cost of calculating the mean
shift vector for a given position x. The multidimen-
sional range searching problem, i.e., the identification
of feature vectors within a certain space S
h
(x) around
x, is fairly straightforward on the regular lattice struc-
ture of an image within spatial range h
s
using a pro-
jection of S
h
(x) into the spatial domain S
h
s
(x) as a bi-
nary mask. Still, all those vectors need to be checked
if they are also within dynamic range h
r
, which is
computationally expensive even though the Epanech-
nikov kernel has a finite support.
This number of comparisons can be reduced with-
out impacting the result using a 3D bucket structure,
where each feature vector is assigned to the corre-
sponding 3D element of size h
s
× h
s
× h
r
, a so called
”bucket” (in case the feature vector is of higher di-
mension than three, only the first three elements are
used for data organization). Now, each feature vector
within S
h
(x) is guaranteed to be within the same or
a neighboring bucket of x. This discretization of the
feature vectors into buckets allows for easy identifi-
cation of feature vectors that are farther than 2 · h
s
or
2 · h
r
away from x, and thus do not need to be consid-
ered any further. Hence, the number of comparisons
is reduced on average.
3.2 Mean Shift Vector Reutilization
Another bottleneck of the mean shift procedure is the
number of iterations to identify the mode correspond-
ing to the initial position x. Using the non-optimized
mean shift definition, the mean shift vector is calcu-
lated and added to the current feature vector until con-
vergence. This is repeated for each point within the
image. Thus if we start the mean shift process from
a data point x
n
, at some iteration τ the current feature
vector x
(τ)
n
might become equal (or very similar) to
another feature vector x
m
and hence both x
n
and x
m
share the same fate, i.e., converge to the same mode.
Such information is not exploited in the basic version,
so that the mean shift vector of certain positions might
be calculated several times, especially for positions
close to a mode, that are typically traversed by many
paths (iteration steps starting from a position x).
Using this optimization, the closest point (i.e.,
the spatially nearest neighbor) to the current feature
vector x
(τ)
n
at each iteration step τ, which we refer
to as x
candidate
in the following, is considered and if
x
candidate
is within a distance of ε
1
· h
r
to the current
feature vector x
(τ)
n
, both points are assigned to the
same mode. Because of the regular grid of the im-
age and the uniform kernel chosen to calculate the
mean shift vector, it is obvious that a feature vector
x
(τ)
n
converges to the same mode as its nearest neigh-
bor x
candidate
on the grid if both feature vectors are
identical in their range domain (after quantization of
the range part of x
(τ)
n
into the image range domain).
If both vectors are not equal but very similar in their
range domain, however, this is not always true, but
a reasonable assumption. Now, in case the corre-
sponding mode to x
candidate
has already been calcu-
lated, the iteration can be stopped early, while other-
wise x
candidate
can be assigned to the same mode as
the initial feature vector x
n
.
Compared to this optimization technique, the spa-
tial discretization step (Carreira-Perpinan, 2006) sub-
MEAN SHIFT SEGMENTATION - Evaluation of Optimization Techniques
367

divides each pixel into l × l cells. Each data point
x
n
that projects onto a cell at some iteration τ
n
does
converge to the same mode as any other point x
m
that
projects onto the same cell at some iteration τ
m
, inde-
pendent of the range domain.
This mean shift vector reutilization technique is
called ”medium speedup” in the EDISON framework.
The parameter ε
1
can be freely chosen and is preset to
ε
1
= 0.5. A low factor will result in a small speedup
and a high segmentation accuracy compared to the
non-optimized case and vice versa.
3.3 Local Neighborhood Inclusion
Additionally to the heuristic described in Section 3.2
one can extend the idea of forcing feature vectors x
(τ)
n
and x
candidate
that are identical in their spatial domain
(after quantization into the image grid) and similar
in their range domain to converge to the same mode
into forcing feature vectors that are similar in both
domains. That means that additionally all feature
vectors within S
h
(x
(τ)
n
) are checked if their distances
are smaller than ε
2
· h
r
to x
(τ)
n
. Then, in analogy to
the above described method, feature vectors x
candidate
within ε
2
· h
r
distance that are not yet assigned to an-
other mode get assigned to the same mode as the cur-
rent feature vector x
(τ)
n
. In case one vector candidate
has already been assigned to a mode, the iteration pro-
cess for x
n
can be again stopped early.
As this optimization strategy, called ”high
speedup” in the EDISON framework, is more error-
prone than the mean shift vector reutilization it is rea-
sonable to choose the parameter ε
2
< ε
1
(ε
2
is preset
to 0.1).
4 EVALUATION METHOD
Assuming the mean shift segmentation results are
satisfying for a given application, we are interested
in how much the heuristics of the performance-
optimized mean shift segmentation will alter the seg-
mentation result. The performance optimizations
covered in Section 3.2 and 3.3 will in this respect
introduce ”errors” compared to the non-optimized
mean shift segmentation result. Hence, to exam-
ine the influence of these optimization techniques on
the mean shift segmentation, we use the original,
non-optimized mean shift segmentation as reference,
which we will call the ”original” result in the follow-
ing. To simplify matters, we limit the evaluation to
single channel 2D images, but one can easily trans-
fer the following methods and results to multichannel
and multidimensional images.
As the mean shift algorithm partitions the image
into several segments rather than separating an ob-
ject (foreground) from the background, typical evalu-
ation features based on the well-known true/false pos-
itive/negative notation (Udupa et al., 2002) cannot be
used for validation purposes. It is also not sufficient
to analyze the difference of both resulting images to
compare different mean shift methods in the domain
of image segmentation. In this particular case the ob-
ject boundaries of all resulting regions are relevant.
To identify erroneous segmented areas one needs to
find corresponding regions in both resulting images,
i.e., the original and comparison segmentation (see
Section 4.1). Then, those pixels at identical image
position that belong to non corresponding regions are
erroneous segmented and can be further analyzed (see
Section 4.2).
4.1 Corresponding Regions
In the output images of the segmentation step, each
region is colored by the gray value of the correspond-
ing mode. As multiple modes may have the same gray
value we firstly label each connected region of pixels
of identical gray value with an unique ID resulting in
two partitions: O for the original and C for the com-
parison result. To identify corresponding regions, the
number of pixels at identical image positions that be-
long to region c
i
∈ C, i ∈ [0, n − 1] and o
j
∈ O, o ∈
[0, m − 1] are counted with n, m being the total num-
ber of regions in C and O, respectively. These pixel-
counts are then stored within a joint-histogram or cor-
respondence matrix A(O,C) := (a
i, j
)
n×m
as elements
at position (i, j). In the following refers one row i to
the pixelcounts of one region c
i
in C and one column
j to the pixelcounts of one region o
j
in O. The iden-
tification of corresponding regions equals an optimal
assignment problem that can be defined in different
manners (Cardoso and Corte-Real, 2005):
Each region in C corresponds to a maximum of
one region in O and vice versa. Then, O and C are
identical if and only if each corresponding pair of re-
gions is identical and when there are no regions with-
out correspondence left. Otherwise, the partition dis-
tance d
sym
(O,C) equals the sum of pixels that belong
to non corresponding regions in O and C and pixels of
regions without correspondence. In other words, the
symmetric partition distance equals
d
sym
(O,C) = t − v(O,C) (5)
with t being the total number of pixels and v(O,C)
denoting the value of the assignment (Cardoso and
Corte-Real, 2005), which is the sum of a selection of
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
368

(a) Partition O (b) Partition C
Figure 2: The right partition is a refinement of the left par-
tition.
elements a
i, j
of A(O,C) such that no row or column
contains more than one selected element. The optimal
assignment is that one of all possible ones that mini-
mizes the symmetric partition distance d
sym
(O,C) and
consequently maximizes the number of pixels v(O,C)
at identical image positions that belong to correspond-
ing regions c
i
, o
j
. This assignment problem is solved
based on the Hungarian method (Kuhn, 1955) and re-
sults in a one-to-one matching.
Alternatively the maximum element in each row
max
j
A(O,C) ∀ i can be located and used to assign
corresponding regions c
i
, o
j
. Such strategy, however,
can result in a many-to-one matching (Kaftan et al.,
2006). In other words, if a region o
j
within the origi-
nal partition falls apart into two or more different re-
gions, many regions c
i
within the comparison parti-
tion might be assigned to o
j
, allowing an oversegmen-
tation of C compared to O. Then, C is a refinement
(Cardoso and Corte-Real, 2005) of O (or C is finer
than O) if and only if each region c
i
in C is identical
to or is contained in one region o
j
in O (see Figure 2).
The resulting asymmetric partition distance
d
asy
(O,C) can be obtained straightforward from ma-
trix A(O,C) as
d
asy
(O,C) = t −
∑
i
max
j
A(O,C)
(6)
Under this asymmetric distance, any partition finer
than the partition O will be at zero distance from it.
Notice that, in general, d
asy
(O,C) 6= d
asy
(C, O).
The other asymmetric distance d
asy
(C, O) can be
calculated accordingly by locating the maximum ele-
ment in each column of A(O,C)
d
asy
(C, O) = t −
∑
j
max
i
A(O,C)
(7)
Under this asymmetric distance, any partition C for
which O is an refinement will be at zero distance from
it and hence allows an undersegmentation of C com-
pared to O.
The optimal strategy, however, depends on the
intended application, because different error types
might have unequal strong effects on the overall per-
formance.
4.2 Evaluation Features
Once corresponding regions have been identified, the
revealed differences can be analyzed. For qualitative
evaluation we show binary error images wherein each
missegmented pixel is colored in black. For quantita-
tive evaluation we have furthermore calculated differ-
ent features:
For segmentation purposes it is important how the
errors are distributed over the image. If many isolated
pixels are evenly spread it might not be as severe as
large connected regions being missegmented. Hence,
we applied a connected component analysis to the re-
sulting error images and calculated the average region
size A
region
and its standard deviation.
Using the mean shift procedure as edge preserv-
ing filtering technique, however, does not necessarily
need a large overlap of corresponding regions. For
such an application the grayvalue differences might
be more meaningful and hence we calculate the mean
grayvalue difference of missegmented pixels between
the original and comparison filter output.
5 RESULTS
We have evaluated optimization techniques based on
several real world images from different databases
(see Figure 3). In the domain of object segmenta-
tion we have used the publicly available databases
COIL-20 and COIL-100 (Nene et al., 1996a; Nene
Figure 3: Example images from the COIL, CELL, and
MISC databases, respectively.
MEAN SHIFT SEGMENTATION - Evaluation of Optimization Techniques
369
Table 1: Processing times for the Cameraman image (256x256 Pixel, 256 grayvalues, Figure 1) using the lattice data structure
(ε
1
= 0.5, ε
2
= 0.1) as absolute time (in seconds) and relative to the non-optimized version using the lattice structure.
Parameters No optimization Medium speedup High speedup
h
s
= 8, h
r
= 4 6.575 (1.0) 1.704 (0.26) 0.239 (0.04)
h
s
= 16, h
r
= 8 40.574 (1.0) 5.997 (0.15) 0.333 (0.008)
h
s
= 32, h
r
= 16 279.530 (1.0) 17.343 (0.06) 0.281 (0.001)
Table 2: Processing times using the bucket data structure (ε
1
= 0.5, ε
2
= 0.1) as absolute time (in seconds) and relative to the
non-optimized version using the lattice structure as listed in Table 1.
Parameters No optimization Medium speedup High speedup
h
s
= 8, h
r
= 4 5.471 (0.83) 0.933 (0.14) 0.214 (0.03)
h
s
= 16, h
r
= 8 27.075 (0.67) 2.949 (0.07) 0.229 (0.006)
h
s
= 32, h
r
= 16 180.909 (0.64) 8.471 (0.03) 0.219 (0.0008)
et al., 1996b). Each available object was segmented
at grayscale level using three different rotations, sum-
marizing to a total of 360 images (in the following
referred to as COIL-database). In the medical domain
we have examined 200 brightfield light microscopy
cell images (Bell et al., 2006) from human oral mu-
cosae in Feulgen and Silver staining each (CELL-
database). Additionally we have used a set of 20 dif-
ferent images, cropped and scaled to a common im-
age size to allow a better comparison, that have been
used in earlier publications (see especially (Comani-
ciu and Meer, 1999)) to show the effectiveness of the
original mean shift procedure (MISC-database). Each
performance-optimized segmentation has been vali-
dated (see Section 5.1 and Section 5.2) in comparison
to the original result as reference. Since the used data
structure does not influence the segmentation result,
we have used the bucket structure (see Section 3.1)
for all experiments analyzing the segmentation accu-
racy. The computational efficiency has been exam-
ined using all possible permutations of optimization
techniques. Considering both aspects, segmentation
quality and computation time, allows to rate the ap-
plicability of each technique to the application of in-
terest, based on its requirements.
To measure the processing time, the Cameraman
image (256x256 Pixel, 256 grayvalues, Figure 1) has
been processed using various spatial and range kernel
radii on a Pentium 4, 3.4GHz. The results averaged
over three runs are shown in Table 1 using the lattice
and in Table 2 using the bucket structure. Addition-
ally to the absolute times (in seconds) the relative time
according to the non-optimized version using the lat-
tice structure are listed.
5.1 Segmentation Quality
To evaluate the segmentation quality, each image
has been segmented without using optional post-
processing steps to avoid their influence on the seg-
mentation output. Using the mean shift procedure
alone, however, will still result in an image contain-
ing several very small regions depending on the ker-
nel size. To circumvent the image falling apart into
too many regions we have chosen relatively large ker-
nel sizes (h
s
, h
r
) = (15, 25). The parameters of the
optimization techniques have been set to ε
1
= 0.5 and
ε
2
= 0.1.
To quantify the differences between the non-
optimized and optimized versions of the mean shift
procedure, the resulting images have been compared
using the symmetric partition distance d
sym
(O,C)
and both asymetric partition distances d
asy
(O,C) and
d
asy
(C, O), which allow the optimized result to be
oversegmented, resp. undersegmented compared to
the original result. The resulting difference images
are exemplarily shown in Figure 4. Averaged over all
test images the relative number on missegmented pix-
els ranges between 4.6% and 18.2% for the mean shift
vector reutilization and between 6.2% and 23.6% for
the local neighborhood inclusion technique depend-
ing on the chosen partition distance and database (see
Table 3).
However, as the test set includes different images,
it is difficult to compare the absolute number of mis-
segmented pixels for both optimization techniques.
Looking at each individual image, we have therefore
calculated the relative increase of missegmented pix-
els of the local neighborhood inclusion technique in
relation to the number of missegmented pixels us-
ing the mean shift vector reutilization technique and
hence obtain a measure that considers the complex-
ity of the segmentation task. Determining the median
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
370
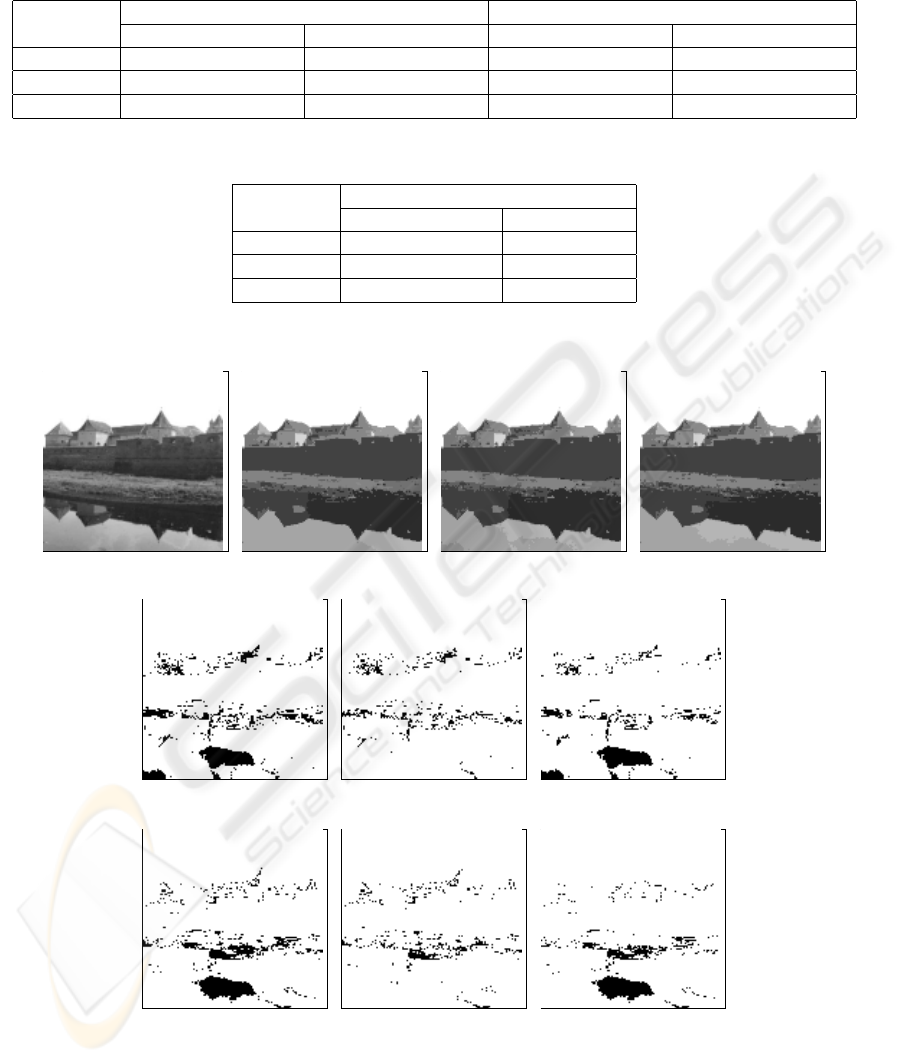
Table 3: Averaged segmentation error. For each optimization technique, the partition distances are listed as absolute pixel
count and relative to the image size (mean value ± standard deviation). Note that the image size within one database is
constant while varying between different databases.
MISC-database COIL-database
Medium speedup High speedup Medium speedup High speedup
d
sym
(O,C) 2807 (18.0±11.2%) 3163 (20.2±10.2%) 2217 (13.5±11.7%) 2802 (17.1±12.7%)
d
asy
(O,C) 1209 (7.7±4.2%) 1433 (9.2±5.2%) 841 (5.1±5.5%) 1167 (7.1±7.1%)
d
asy
(C, O) 2120 (13.6±10.8%) 2333 (14.9±8.3%) 1738 (10.6±10.6%) 2124 (13.0±11.0%)
Averaged segmentation error relative to the image size (image size varies within CELL-database).
CELL-database
Medium speedup High speedup
d
sym
(O,C) 18.2±14.2% 23.6±15.1%
d
asy
(O,C) 4.6±4.0% 6.2±5.6%
d
asy
(C, O) 15.8±13.5% 20.3±14.1%
(a) Original (b) Non-optimized (c) Medium speedup (d) High speedup
(e) d
sym
(O,C) (f) d
asy
(O,C) (g) d
asy
(C, O)
(h) d
sym
(O,C) (i) d
asy
(O,C) (j) d
asy
(C, O)
Figure 4: (a) Fagaras image. (b-d) Mean shift segmented using different speedup levels with (h
s
, h
r
) = (15, 25). (e-g) Partition
distance of (c) and (b). (h-j) Partition distance of (d) and (b) (missegmented pixels are shown in black color).
MEAN SHIFT SEGMENTATION - Evaluation of Optimization Techniques
371
Table 4: Averaged size of missegmented regions in pixel. The common image sizes of the MISC- and COIL-database are
125x125, and 128x128 respectively. The averaged standard deviation of the region sizes within each image is listed in
brackets.
MISC-database COIL-database
Medium speedup High speedup Medium speedup High speedup
d
sym
(O,C) 19.2 (137.3) 17.7 (143.7) 67.6 (233.7) 66.0 (299.3)
d
asy
(O,C) 6.1 (26.0) 6.8 (37.4) 14.5 (48.9) 12.2 (69.0)
d
asy
(C, O) 16.6 (119.3) 14.4 (117.2) 83.3 (209.1) 66.9 (252.9)
Averaged size of missegmented regions relative to the image size on the CELL database. The averaged standard deviation of
the relative region sizes within each image is listed in brackets.
CELL-database
Medium speedup High speedup
d
sym
(O,C) 0.26 (3.3) 0.33 (4.0)
d
asy
(O,C) 0.04 (0.2) 0.06 (0.4)
d
asy
(C, O) 0.32 (4.9) 0.35 (4.9)
Table 5: Averaged mean difference between the grayvalues of missegmented pixels compared to the non-optimized segmen-
tation result in absolute values and relative to the dynamic range (mean value ± standard deviation).
MISC-database COIL-database
Medium speedup High speedup Medium speedup High speedup
d
sym
(O,C) 14.5 (5.7±2.0%) 14.0 (5.5±2.1%) 19.5 (7.6±2.9%) 19.7 (7.7±3.0%)
d
asy
(O,C) 17.4 (6.8±2.4%) 16.5 (6.5±2.4%) 22.6 (8.8±3.0%) 22.0 (8.6±3.6%)
d
asy
(C, O) 14.9 (5.8±2.1%) 14.7 (5.7±2.5%) 20.5 (8.0±3.2%) 21.6 (8.4±3.3%)
Averaged mean grayvalues difference on the CELL database.
CELL-database
Medium speedup High speedup
d
sym
(O,C) 15.3 (6.0±2.3%) 14.3 (5.6±2.0%)
d
asy
(O,C) 21.0 (8.2±2.0%) 19.9 (7.8±2.3%)
d
asy
(C, O) 16.2 (6.3±3.3%) 14.8 (5.8±3.0%)
value of this measure shows that the number of mis-
segmented pixels grows by 24.7% using the symmet-
ric distance measure and by 19.7% and 24.3% using
d
asy
(O,C) and d
asy
(C, O), respectively.
Next, the average missegmented region size did
not significantly change between the optimization
techniques. However the increased averaged standard
deviation of the region sizes within each image indi-
cates that the local neighborhood inclusion techniques
produces a larger variance (d
sym
(O,C) and d
asy
(O,C))
and hence also larger connected regions of misseg-
mented pixel than the mean shift vector reutilization
technique (see Table 4).
Finally, the average mean difference of the mis-
segmented pixel gray values compared to the non-
optimized segmentation result did not change signifi-
cantly (see Table 5).
5.2 Rotational Invariance
The heuristic-based optimization techniques both ac-
cess earlier calculated mean shift vectors to estimate
the correct mean shift vector at some positions and
hence result in a mean shift procedure, which is not
rotationally invariant anymore. In fact, the order-
ing of the pixels being processed may have a sig-
nificant impact on the segmentation result. To ver-
ify this observation, we have exemplarily rotated one
image by 90
◦
and compared its segmentation using
(h
s
, h
r
) = (15, 25) for each optimization technique to
the segmentation result of the non-rotated image. Fig-
ure 5 shows on the basis of the error images using the
symmetric partition distance that the local neighbor-
hood inclusion technique is stronger corrupted (as ex-
pected) than the mean shift vector reutilization tech-
nique, while the non-optimized version can be con-
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
372
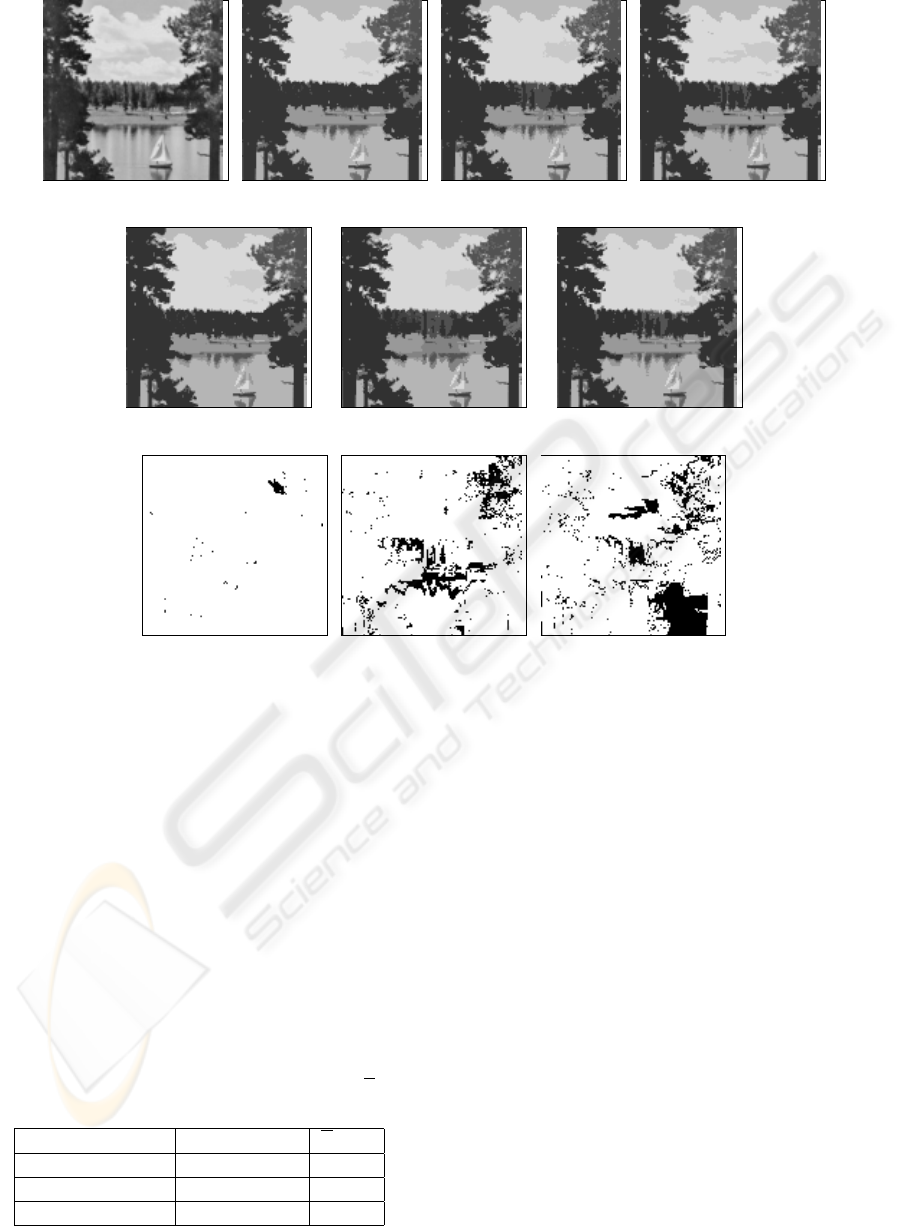
(a) Original (b) Non-optimized (c) Medium speedup (d) High speedup
(e) Rotated, non-optimized (f) Rotated, med. speedup (g) Rotated, high speedup
(h) d
sym
(O,C) (i) d
sym
(O,C) (j) d
sym
(O,C)
Figure 5: (a) Lake image. (b-d) Mean shift segmented using different speedup levels with (h
s
, h
r
) = (15, 25). (d-f) Mean
shift segmented using identical parameters, but a 90
◦
rotated input image. (h-j) Partition distance of (b-d) and (e-g) using
d
sym
(O,C) comparing corresponding optimization techniques.
sidered to be practically rotationally invariant. In fact,
even for the non-optimized version, a few error pixels
can be observed due to numerical reasons. Analyzing
the error images shows (see Table 6) that 16.1% of the
pixels are affected using the local neighborhood in-
clusion speedup technique and 11.1% using the mean
shift vector reutilization technique (compared to 0.6%
for the non-optimized version) with an average region
size of 10.56 and 9.75 pixels, respectively.
Table 6: Segmentation error caused by rotational variance.
For each optimization technique, the symmetric partition
distance d
sym
(O,C) and the average error region size A
region
are listed from the images shown in Figure 5.
Optimization d
sym
(O,C) A
region
Non-optimized 96 (0.6%) 3.84
Medium speedup 1742 (11.1%) 10.56
High speedup 2516 (16.1%) 9.75
6 CONCLUSIONS
We have quantitatively evaluated different optimiza-
tion techniques for the Epanechnikov based mean
shift segmentation algorithm regarding their accuracy
and computational performance. As expected, each
optimization technique that reduces the number of
necessary mean shift vector calculations introduces
some errors compared to the non-optimized mean
shift procedure. On the one hand, the quantity of er-
rors has been measured to be on average 18.0% for the
mean shift vector reutilization and 20.2% for the local
neighborhood inclusion technique using a symmetric
partition distance measure. However, the impact of
such optimizations on the segmentation accuracy de-
pends on the image material. Depending on the ap-
plication the fact that using the described heuristics
results in a rotationally variant segmentation (up to
16.1% of the pixels have been affected in our exam-
ple) might be even more severe than the previously
MEAN SHIFT SEGMENTATION - Evaluation of Optimization Techniques
373

mentioned errors. On the other hand, the improve-
ment of the computational efficiency is remarkable.
Especially for large kernel radii, the processing time
could be reduced from 280s to 0.219s on a standard
PC in our example. Finally, it depends on the require-
ments of the intended application if the described op-
timization techniques are applicable but analyzing our
results one can rate the pros and cons of each tech-
nique.
ACKNOWLEDGEMENTS
We would like to thank the authors of
(Christoudias et al., 2002) for providing the
EDISON software at their laboratory website
(http://www.caip.rutgers.edu/riul/) and the authors of
(Cardoso and Corte-Real, 2005) for providing their
evaluation application upon request.
REFERENCES
Bell, A. A., Kaftan, J. N., Aach, T., Meyer-Ebrecht, D., and
B
¨
ocking, A. (2006). High Dynamic Range Images as
a Basis for Detection of Argyrophilic Nucleolar Or-
ganizer Regions Under Varying Stain Intensities. In
IEEE International Conference on Image Processing.
ICIP 2006, pages 2541–2544.
Cardoso, J. and Corte-Real, L. (2005). Toward a generic
evaluation of image segmentation. IEEE Transactions
on Image Processing, 14(11):1773–1782.
Carreira-Perpinan, M. A. (2006). Acceleration strategies for
gaussian mean-shift image segmentation. In Proceed-
ings of the 2006 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition. CVPR
2006, pages 1160–1167.
Cheng, Y. (1995). Mean Shift, Mode Seeking, and Clus-
tering. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 17(8):790–799.
Christoudias, C. M., Georgescu, B., and Meer, P. (2002).
Synergism in Low Level Vision. In IEEE Inter-
national Conference on Pattern Recognition. ICPR
2002, volume 4, pages 150–155.
Comaniciu, D. and Meer, P. (1997). Robust Analysis of
Feature Spaces: Color Image Segmentation. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion. CVPR 1997, pages 750–755.
Comaniciu, D. and Meer, P. (1999). Mean Shift Analysis
an Applications. In International Conference on Com-
puter Vision. ICCV 1999, volume 2, pages 1197–1203.
Comaniciu, D. and Meer, P. (2002). Mean Shift: A Ro-
bust Approach Toward Feature Space Analysis. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 24(5):603–619.
Fukunaga, K. and Hostetler, L. D. (1975). The Estimation
of the Gradient of a Density Function, with Applica-
tions in Pattern Recognition. IEEE Transactions on
Information Theory, 21(1):32–40.
Georgescu, B., Shimshoni, I., and Meer, P. (2003). Mean
Shift Based Clustering in High Dimensions: A Tex-
ture Classification Example. In International Con-
ference on Computer Vision. ICCV 2003, volume 1,
pages 456–463.
Grady, L. (2006). Random walks for image segmentation.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 28(11):1768–1783.
Hu, Q., Hou, Z., and Nowinski, W. L. (2006). Supervised
range-constrained thresholding. IEEE Transactions
on Image Processing, 15(1):228–240.
Kaftan, J. N., Kiraly, A. P., Naidich, D. P., and Novak, C. L.
(2006). A Novel Multi-Purpose Tree and Path Match-
ing Algorithm with Application to Airway Trees. In
SPIE Medical Imaging 2006: Physiology, Function,
and Structure from Medical Images, volume 6143,
pages 215–224.
Kuhn, H. W. (1955). The Hungarian method for the assign-
ment problem. Naval Research Logistic Quarterly,
2:83–97.
Nene, S., Nayar, S., and Murase, H. (1996a). Columbia
Object Image Library (COIL-100). Technical report,
Computer Vision Laboratory, Columbia University.
Nene, S., Nayar, S., and Murase, H. (1996b). Columbia Ob-
ject Library (COIL-20). Technical report, Computer
Vision Laboratory, Columbia University.
Sethian, J. A. (1999). Level Set Methods and Fast Marching
Methods. Cambridge University Press.
Suri, J. S., Setarehdan, S. K., and Singh (Eds), S. (2002).
Advanced Algorithmic Approaches to Medical Image
Segmentation. Springer.
Udupa, J. K., LaBlanc, V. R., Schmidt, H., Imielinska, C.,
Saha, P. K., Grevera, G. J., Zhuge, Y., Currie, L. M.,
Molholt, P., and Jin, Y. (2002). Methodology for eval-
uating image-segmentation algorithms. In SPIE Med-
ical Imaging: Image Processing, volume 4684, pages
266–277.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
374
