
HAND GESTURE TRACKING FOR WEARABLE COMPUTING
SYSTEMS
Xiujuan Chai, Kongqiao Wang, Luosi Wei and Hao Wang
System Research Center, Nokia Research Center, Hepingli Dongjie, Beijing, China
School of Automation Science and Electrical Engineering, Beihang University, Beijing, China
Keywords: Wearable computing, temporal differencing, motion region, skin detection, colour histogram.
Abstract: Wearable computing is a hot research field in recent years. For the important role in wearable computing
systems, hand gesture tracking attracts many researchers’ interests. This paper proposes a simple but
efficient temporal differencing based hand motion tracking scheme which is used to build an augmented
drumming system. In our method, the accurate motion information is gotten by a fine-coarse-fine strategy.
Once getting the motion region candidates, a skin detector based on skin colour histogram is used to
determine which region is our concerned hand. In the tracking procedure, motion direction constraint is also
adopted in order to get a robust result. Different with the traditional skin detection for the whole image
frame, combining with the motion region detection, the hand detection is no longer effected by the skin-like
background. Experimental results show that our presented hand gesture tracking is robust and fast. We also
adopt it into an augmented drumming system to show the good performance and powerful potential of our
method in wearable computing systems.
1 INTRODUCTION
Wearable computing facilitates a new form of
human-computer interaction(HCI). Hand detection
and tracking is widely exploited for the important
role in wearable computing systems for the potential
applications, including the command control, games,
text input and many other aspects (Manresa,
2005)(Buades, 2004)(MacCormick, 2000).
So far, the state-of-the-art tracking strategy can
achieve high accuracy under restrict environment.
However, when confronted with complicated
background and irregular motion, the tracking
performance will be decreased dramatically.
Therefore, researchers’ should pay more attention to
the robust hand tracking under unrestricted
conditions. Over the study of these years, there are
many literatures focus on hand tracking and
analysis. Roughly, the tracking methods can be
divided into two categories: appearance-based
method and the model-based method.
In general, the model-based method aims to find
the accurate mapping from the 2D image to the 3D
configuration model of hand (Wu, 2001) (Lu, 2003)
(Chang, 2005). Although such tracking can achieve
good performance even for the detailed finger
motion, the computations are always time-
consuming for the iterative fitting to the elaborate
3D hand model.
While the appearance-based method aims to get
the correspondence between sequential video frames
based on the image features. Here, the image
features include not only the color, edge, position,
but also the transformed features, such as the
histogram feature, wave-let feature, high level
semantic feature etc. The time cost changes with the
selected features and in general, it will be less than
the model-based method. (Shamaie, 2003) proposes
a Kalman filtering-based dynamic model to deal
with the bimanual movements. (Shan, 2007)
proposes mean shift embedded particle filtering to
improve the sampling efficiency. (Bowden, 2002)
adopts eigenspace approaches to model contour and
appearance feature spaces. And there are also some
papers focusing on much simpler features (Martin,
1998) (Huang, 2002). It is naturally that if the
selected feature is simpler, then the time cost is
lower.
Considering the efficiency, we also adopt
appearance-based method to tackle hand tracking
problem. First, a fine-coarse-fine strategy is
performed to realize robust motion region finding.
651
Chai X., Wang K., Wei L. and Wang H. (2008).
HAND GESTURE TRACKING FOR WEARABLE COMPUTING SYSTEMS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 651-654
DOI: 10.5220/0001080306510654
Copyright
c
SciTePress
Then skin color is used as a constraint for the
determination of the hand region. Simultaneously,
the moving direction of each motion rectangle is
also computed, which is used to eliminate some
unmeaningful motions and erect the correspondence
of moving targets. To show the potential to wearable
computing, the tracking is conducted in an
augmented drumming system as an instance and
shows good performance.
2 HAND MOTION TRACKING
STRATEGY
Our scheme for hand motion tracking mainly
includes three modules: motion region detection,
skin detection and the final motion vector
computing.
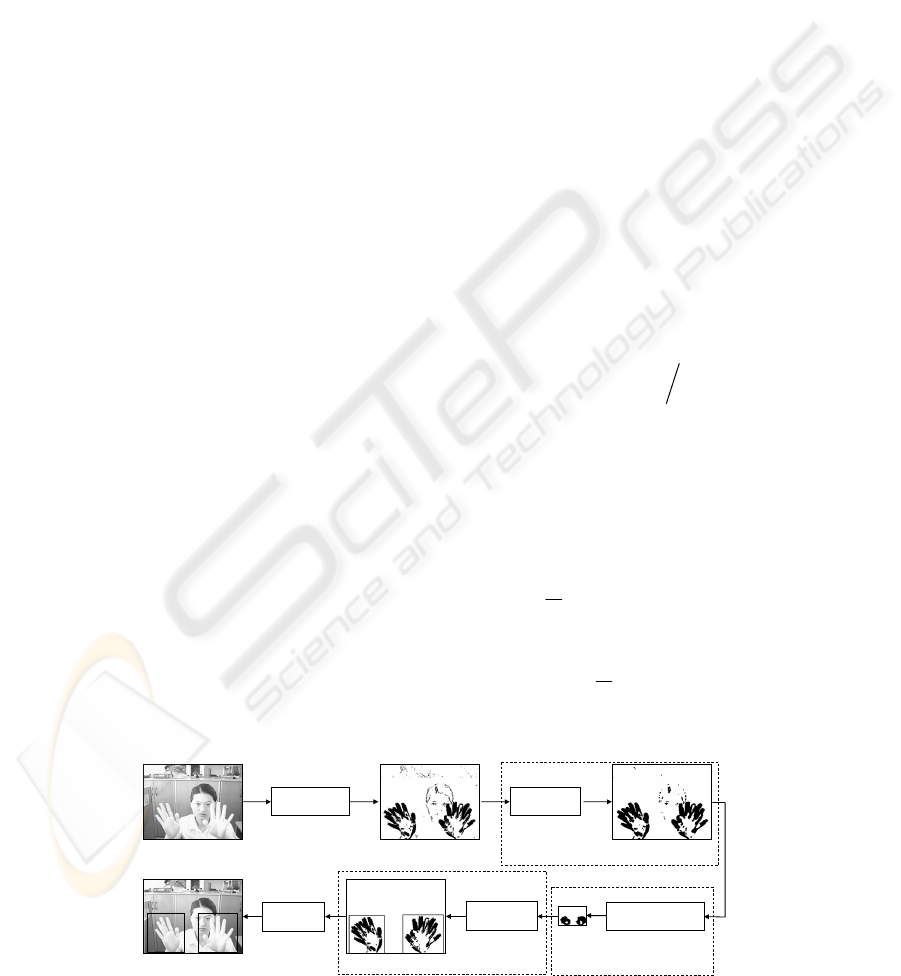
2.1 Motion Region Detection
In this part, a fine-coarse-fine strategy is adopted in
the temporal differencing to achieve a good de-
noising. For two consecutive video frames, i.e. . the
differencing is operated between the current frame
n
I and the previous frame
1−n
I . With an
experimential threshold, we get the binary difference
image
n
D according to Eq.(1), which usually
contains many noise points for the illumination
effect, as shown in Figure.1 (b).
()
⎩
⎨
⎧
=
,1
,0
,
round)else(backg
elmotion pix
yx
n
D
(1)
To further eliminate these noises, a fine-coarse-
fine strategy is using here. By performing the de-
noising operation in these transformable levels, the
obtained differencing image is very clear.
Fine level: Performing the de-noising operation
(erosion and dilation) to
n
D , and we can get a
binary image
n
D
′
with less noise as shown in Figure.
1(c).
Coarse level: Performing down-sampling to
n
D
′
,
then doing the de-noising operation to get
()
s
n
D
′
.
Fine level: Refining
n
D
′
from
()
s
n
D
′
:
()
(
)
()( )
()
⎪
⎩
⎪
⎨
⎧
=
′′′
=
=
′
lse ,,
0,
0,, ,0
,
eyx
yxDand
yx
yx
n
s
n
n
n
D
D
D
(2)
here,
hyywxx /,/
=
′
=
′
, w and h are the down-
sampling steps along x and y directions respectively.
2.2 Skin Detection
In the motion region detection stage, we can detect
all the dominating motions, which are caused by
hand movement, body movement, or the movement
of anything else in the scene. It is obvious that some
motions are meaningless for us. Therefore, how to
move such motions from all detected candidates is
important and here we exploit a skin detector based
on color histogram.
In the model training procedure, first collecte
many hand moving rectangles. Then by using color
clustering, the skin pixels in these rectangles are
determined to erect the statistical color histogram
H ,
which could be defined as follows:
{
}
),...,1,0(,),(
),(
KiMiyxfN
yx
i
===
∑
H
.
(3)
In Eq.(3),
binyxIyxIbinyxIyxf
BGR
/).().(*).(),( ++=
, and
binbinK /255255*255
+
+
=
, with 16
=
bin .
Here
M is the total number of the skin pixels and N
is defined as:
{}
⎩
⎨
⎧
=
is false, f
is true , f
fN
0
1
.
(4)
Similarly, we can get a statistical non-skin color
histogram
H
. Therefore, one pixel is determined to
be skin point if it satisfies the following two terms:
(1)
0
),(
>
yxf
H
,
(2)
),(),( yxfyxf
HH ⋅>
α
, 10 <
<
α
.
Temporal
Differencin
g
Erosion
& Dilation
Downsampling
& Dilation & Erosion
Refine from
downsam
p
lin
g
Map to
ima
g
e frame
A. Fine Level
B. Coarse Level C. Fine Level
(a)
(b)
(c)
(d)
(e)
(f)
Figure 1: Flowchart of the motion region finding.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
652

Figure 2 gives two examples for skin color
detection. The results clearly show that the skin
detection strategy can extracted the hand region
from so difficult background.
Figure 2: Examples for skin color detection.
With this skin detection procedure, the
percentage of the skin pixels to the whole pixels in
the moving rectangle can be computed. Through a
comparison with a predefined threshold, we can
eliminate the moving regions caused by non-skin
color objects, as given in Figure 3.
(a) Original frame (b) Hand tracking
without skin detection
(a) Hand tracking with
skin detection
Figure 3: The comparison of the hand motion tracking
with and without skin detection constraint.
2.3 Motion Vector Computing
To complete the tracking task, we try to erect the
correspondence between these motion rectangles by
using the moving direction information. Considering
the simplicity and effectiveness, block matching
algorithm is adopted in this paper. In our
implementation, we aim to get the mean moving
direction of each motion rectangle based on the
moving vector of the whole frame. Figure.4 gives an
example for the motion vector field and moving
directions for hand regions.
3 AN INSTANCE - AUGMENTED
DRUMMING SYSTEM
Augmented reality (AR) is a hot field of wearable
computing research which deals with the real world
(b) Current frame
(a) Previouse frame
(c) Motion vector field
(d) Moving direction
for hands
Figure 4: An example for the motion vector field and hand
motion region direction.
and computer generated data. In this paper, we
present a simple augmented drumming system as an
instance. Through the hand motion tracking, the
virtual drumming sound is generated and the virtual
drum is displayed with the real person and
background in the screen. Some examples are given
in Figure. 5 of Section 4.
Simply speaking, if the hand motion region
arrived at the virtual drum surface location with a
downwards moving direction, then it is determined
as a valid drum activity and the system is triggered
to sound. Another important parameter is the volume
of the sound and here it is determined through the
location information according to Eq.(5):
(
)
hCCVv
y
nn 2−
−⋅= ,
(5)
where,
V is the predefined max value of volume.
y
nn
CC
2−
− is the vertical distance between the two
centers
n
C and
2−n
C of n-th and (n-2)-th frames, h
is the height of the image frame.
4 EXPERIMENTS
4.1 Experiment on Hand Motion
Tracking
The qualitative results for hand motion tracking have
been given in the Figure 2 and Figure 3 shown.
To evaluate the performance of the hand motion
tracking, we adopt such a measurement principle:
dh
nnr
=
,
(6)
here,
h
n and
d
n are the numbers of hand motion
region and totally detected motion region
respectively.
In our experiment, 10 short videos are recorded,
totally 2055 frames. We compare the hand motion
HAND GESTURE TRACKING FOR WEARABLE COMPUTING SYSTEMS
653

detection rates between with and without skin
detection constraint as listed in the table 1. In some
of our test videos, we add some motions caused by
other objects, and the experimental results show that
this kind of motion can be effectively eliminated and
thus the hand motion detection rate with skin
detection constraint improves remarkably. Importing
the skin detection modular also causes the increasing
of the time cost, as shown in Table 1. Fortunately,
the increasing can be accepted for general HCI tasks
and it can be compensated by high performance
computers.
Table 1: The comparison results of the hand motion
detections with skin model and without skin model
conditions.
skin detection
constraint
Hand motion
detection
Evaluation
Without With
Detection rate 76.4% 93.04%
Time cost (ms/frame) 2.7 6.2
4.2 Experiment on Augmented
Drumming
In this wearable computing instance, the aim of our
hand motion tracking is to monitor an augmented
drumming system. Assuming a virtual drum location
first, through the hand tracking results, the rataplan
activity can be determined and the drumbeat is
played. By the integration of the hand motion
tracking and motion vector computation, the
augmented drumming system works well. Here,
some examples are given on Figure. 5, which show
the good performance of the interactive system.
(a) (b) (c)
Figure 5: The examples of the augmented drumming
system.
5 CONCLUSIONS
This paper proposes a robust hand gesture tracking
strategy. As an important visual analysis task for
wearable computing system, it is also used for an
augmented drumming system. In our motion
detection method, a fine-coarse-fine strategy is
adopted to eliminate lots of noise and get clear
results. Based on the extracted motion rectangles,
the skin detection using color histogram feature is
performed on them to determine the hand region.
The simple training procedure makes the distinction
between hand pixels and the skin-like background
become very easy and effective. Integrating the
motion vector computing, our proposed hand gesture
tracking strategy shows good performance in the
augmented drumming system.
REFERENCES
Martin, J., Devin, V, Crowley, J. L. 1998. Active Hand
Tracking. Proc. of the 3rd. Int. Conf. on Face and
Gesture Recognition. pp. 573-578.
Buades, J. M., Perales, F. J. , Varona, J., 2006. Real Time
Segmentation and Tracking of Face and Hands in VR
Application. Third Int. Workshop on Articulated
Motion and Deformable Objects. pp. 259-268.
Manresa, C., Varona, J., Mas, R., Perales, F. J., 2005.
Hand Tracking and Gesture Recognition for Human-
Computer Interaction. Electronic Letters on Computer
Vision and Image Analysis. 5(3): 96-104.
Lu, S., Metaxas, D., Samaras, D., Oliensis, J.2003. Using
Multiple Cues for Hand Tracking and Model
Refinement. CVPR, 2(443-450).
Chang, W., Chen, C., Hung, Y., 2005. Appearance-
Guided Particle Filtering for Articulated Hand
Tracking.CVPR. pp.235-242.
Wu, Y., Lin, J., Huang, T., 2001. Capturing Natural Hand
Articulation. ICCV. pp. 426-432.
Shamaie, A., Sutherland, A., 2003. A Dynamic Model for
Real-Time Tracking of Hands in Bimanual
Movements. Gesture Workshop. pp.172-179.
Rosales, R., Sclaroff, S., 2006. Combining Generative and
Discriminative Models in a Framework for Articulated
Pose Estimation. IJCV. 67(3): 251-276.
Stenger, B. 2005. Model-Based hand Tracking Using a
Hierarchical Bayesian Filter. Ph.D. Thesis. University
of Cambridge, St. John’s College.
MacCormick, J., Isard, M., 2000. Partitioned Sampling,
Articulated Objects, and Interface-Quality Hand
Tracking. ECCV. pp.3-19.
Shan, C., Tan, T. Wei, Y. 2007. Real-Time Hand
Tracking using a Mean Shift Embedded Particle Filter.
Pattern Recognition. 40(7):1958-1970.
Huang, Y., Huang, T., Niemann, H., 2002. Two-Handed
Gesture Tracking Incorporating Template Warping
With Static Segmentation. FGR.. pp.275-280.
Bowden, R., Sarhadi, M.,2002. A Non-linear Model of
Shape and Motion for Tracking Finger Spelt American
Sign Language, Image Vision Comput. 20: 597–607.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
654
