
BIOLOGICALLY INSPIRED ATTENTIVE MOTION ANALYSIS FOR
VIDEO SURVEILLANCE
Florian Raudies and Heiko Neumann
Institute of Neural Information Processing, University of Ulm, 89069 Ulm, Germany
Keywords:
Attention, Video Surveillance, Motion Streaks, Image Flow, Recurrent Grouping.
Abstract:
Recently proposed algorithms in the field of vision-based video surveillance are build upon directionally con-
sistent flow (Wixson and Hansen, 1999; Tian and Hampapur, 2005), or statistics of foreground and back-
ground (Ren et al., 2003; Zhang et al., 2007). Here, we present a novel approach which utilizes an attention
mechanism to focus processing on (highly) suspicious image regions. The attention signal is generated through
temporal integration of localized image features from monocular image sequences. This approach incorpo-
rates biologically inspired mechanisms, for feature extraction and spatio-temporal grouping. We compare our
approach with an existing method for the task of video surveillance (Tian and Hampapur, 2005) with a re-
ceiver operator characteristic (ROC) analysis. In conclusion our model is shown to yield results which are
comparable with existing approaches.
1 INTRODUCTION
Video surveillance is a recent field of research ad-
dressing the tasks of detection, localization, recog-
nition, and tracking of specific objects. Existing ap-
proaches are based upon the following assumptions
to detect attentional regions in spatio-temporal im-
age sequences: (i) directionally consistent image flow
were used to separate coherent object movement from
spatio-temporal fluctuations of scene events (Wixson
and Hansen, 1999; Tian and Hampapur, 2005), or
(ii) temporally non-deformable image features were
matched between subsequent frames (Zhou and Ag-
garwal, 2001). In contrast, our model utilizes moving
features which could be further updated over time due
to an increasing gain of evidence for the presence of
the spatio-temporal structure or event.
Several mechanisms in our model are motivated
by neurophysiological evidence. At first, simple fea-
tures are extracted, according to the early visual pro-
cessing in area V1 (Hubel and Wiesel, 1968). These
features are temporally differentiated to extract on-
and offset of temporal changes in the image struc-
ture (Marr and Ullman, 1981). The result of feature
extraction and differentiation are then integrated and
temporally smoothed which in turn leads to a lower
temporal signal resolution. This result is referred to
as streak image, representing traces from temporal
changing features. For the extraction of activity for
a specified orientation of those traces, we employ Ga-
bor filters (Daugman, 1988). Grouping of these activ-
ities is realized by long-range interaction filters uti-
lizing a biologically inspired scheme (Neumann and
Sepp, 1999). Motion information is processed along
a pathway parallel to the form features. This division
of segregated form and motion processing is reminis-
cent of the ventral and the dorsal stream in cortical
visual processing in primates.
The main contributions of our model architecture
are: (i) the formulation of a biologically inspired
model for the task of video surveillance, (ii) the con-
struction of a motion streak image, integrating only
salient temporally changing features, (iii) a general
grouping mechanism, and (iv) feature binding at vari-
ous stages within the model. To the best of our knowl-
edge, this is the first model which incorporates motion
streaks as an attentional signal and furthermore con-
structs salient streak representations, which contain
no temporally static features. Additionally, the com-
bination of three attentive signals is new in the field of
video surveillance. Processing in two parallel path-
ways is motivated by the representation of changes
on two temporal scales, whereas motion streaks in-
tegrate over several time steps, and image flow con-
tains mostly information of two temporally subse-
quent snapshots. These two temporal scales combine
645
Raudies F. and Neumann H. (2008).
BIOLOGICALLY INSPIRED ATTENTIVE MOTION ANALYSIS FOR VIDEO SURVEILLANCE.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 645-650
DOI: 10.5220/0001078806450650
Copyright
c
SciTePress
long-time motions with actually motions in an appro-
priate way to identify attentional regions, which is one
task of surveillance.
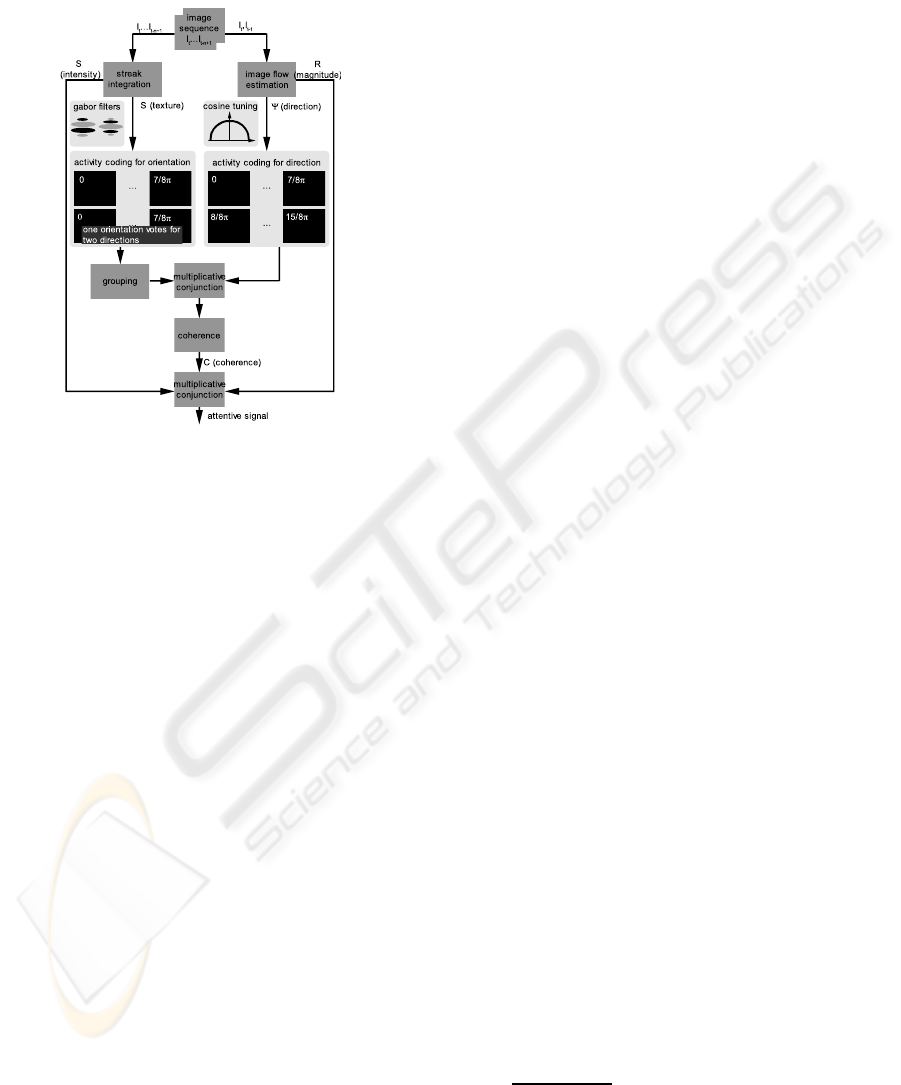
Figure 1: Schematic overview of the model. Details about
the functionality of all parts are reported in Sec. 3.
2 OVERVIEW OF THE MODEL
This model computes an attention signal from an im-
age sequence I
t
,...,I
t−n+1
of n frames. The streak im-
age is the result of a temporal integration of all frames
while the image flow is estimated on the basis of the
two most recent frames. These two mechanisms form
four signal channels: (i) the intensity of the motion
streaks, (ii) the specific texture of the motion streak
image, (iii) the direction of image flow, and (iv) the
magnitude of image flow. At the very beginning an
activity coding is constructed, for orientations in the
texture channel and for directions of the image flow.
Subsequently, a grouping mechanism is employed to
further process the activity code of the texture chan-
nel. This mechanism enforces aligned structures get-
ting the same orientation. An incorporation of both
activity codes is realized by a multiplication. The re-
sult contains information about the direction of fea-
ture displacements, which is then transformed into a
coherence signal. Finally, again a multiplication of
this coherence signal together with the streak intensity
signal and motion magnitude signal results in the final
attention signal. Fig. 1 gives an schematic overview
about the processing pathways of the signal channels.
3 SPECIFIC MECHANISMS
Motion Detection and Integration. For the estima-
tion of image flow we used the algorithm of Lucas &
Kanade (Lucas and Kanade, 1981), with a window
size of 21. Spatial derivatives are calculated using
the discrete kernel [−1, 8,0,−8,1]/12 according to
(Barron et al., 1994). Further processing uses a po-
lar representation of the image flow with magnitude
R and direction Ψ. For the interaction with the streak
texture signal a population code for the direction Ψ of
motion is constructed by a rectified cosine-tuning
A
motion,dir
ψ
= max(cos(Ψ− ψ), 0), ψ = 0,...,15/8π (1)
for each sampling direction ψ. Here the sampling
is equidistant and is defined for sixteen directions, an
example is shown in Fig. 2.
Temporal Change Detection and Motion Streaks.
The computation of salient motion streaks starts with
the extraction of corner features, resulting in a rep-
resentation of more distinctive and localized image
properties. These features are detected with the
F¨orstner corner detector (F¨orstner, 1986). In a prepro-
cessing stage each image is smoothed with a Gaus-
sian kernel (σ
pre
=1.0). The structure tensor is com-
puted by calculating the vector product of the inten-
sity gradient that is averaged over a local neighbor-
hood (smoothing with a Gaussian kernel σ
tensor
=0.5).
Let λ
1
and λ
2
denote the eigenvalues of this tensor,
then a continuous valued corner is characterized by
F = λ
1
λ
2
/(λ
1
+ λ
2
),
¯
F = F ∗ G
gauss
σ
t
. (2)
These corner features are temporally smoothed with a
Gaussian (σ
t
= 2.0), which suppresses temporal noise
in the input sequence. A logarithmic transformation is
applied to enhance features with low response ampli-
tudes, resulting in
¯
F
space
. For an integration of mov-
ing features a temporal derivative
¯
F
time
(x,y;t) ≈
¯
F
space
(x,y;t) ∗ [1, −1](t) (3)
of each image is additionally calculated. Together
with the previoustemporal smoothing this mechanism
eliminates pure static image features. The conjunc-
tion of feature representations
¯
F
space
and
¯
F
time
given
by
¯
F
comb
=
¯
F
space
·
¯
F
time
results in a high spatial reso-
lution and a sufficient temporal resolution of features.
Temporal integration of the combined signals is real-
ized by the weighted sum
S =
α
1− (1− α)
n
n−1
∑
i=0
(1− α)
i
¯
F
comb
(x,y;t − i), (4)
where S denotes the motion streak image. The
parameter α avoids an infinite temporal integration
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
646

(α=0.05). In addition to the intensity image the streak
image contains a specific texture generated by moving
corner features. An analysis of this texture is realized
by oriented derivatives of the streak image S
A
streak,ori
φ
= S ∗ G
gabor
φ,σ,λ
, φ ∈ [0,π) (5)
computed with a Gabor filter approach (DC level
free). The Gabor filters are parameterized by eight
orientations φ, with ∆φ = π/8, one scale σ, and wave-
length λ (σ=4, λ=6px).
Grouping Mechanism. Grouping is performed for
the motion streak activities A
streak,ori
φ
serving as input
activity A
in
φ
, and the result of grouping A
out
φ
is further
referred to as
ˆ
A
streak,ori
φ
. The grouping method em-
ployed is a simplified version of a mechanism that has
been proposed to account for the neural mechanisms
of surface boundary formation and the extraction of
invariant surface features (Weidenbacher et al., 2006;
Neumann and Sepp, 1999). The method consists of
four steps forming an iterative loop (for notational
simplification we omit parameters denoting 2-D spa-
tial location):
x
ori
φ
= A
in
φ
(1+ cA
out
φ
) (6)
y
ori
φ
= x
ori
φ
/(µ+
∑
ϒ
x
ori
ϒ
) (7)
x
group
φ
= y
ori
φ
∗ G
bipol
φ,σ
1
,σ
2
(8)
A
out
φ
= x
group
φ
/(µ+
∑
ϒ
x
group
ϒ
). (9)
In Eq. 6 the initial input signal A
in
φ
is nonlinearly en-
hanced by the feedback term (1 + cA
out
φ
), with the
feedback constant c (c=100). This modulatory cou-
pling of feedback guarantees stability, therefore only
existing feature activities at given location and ori-
entation are enhanced by feedback, since the term
1+ cA
out
φ
is gated by the driving signal activation A
in
φ
.
However, feedback alone cannot generate any feature
activities. Substages at the levels of orientation and
grouping computation (Eq. 7 and Eq. 9) consist of a
normalization step to keep activities within bounds.
The parameter µ affects the influence of the total acti-
vation in the normalization process (µ = 10
−2
). Eq. 8
realizes the propagation (grouping) of orientational
responses along their corresponding orientation axis
φ. In this equation, G
bipol
φ,σ
1
,σ
2
denotes a bipolar filter
consisting of two Gaussian kernels which are spa-
tially offset along the orientation axis at the target lo-
cation. Each kernel has an elongation σ
1
for the major
axis, σ
2
for the minor axis, and orientation φ (σ
1
=3.5,
σ
2
=1.5). These kernels are combinedto form a group-
ing filter along the orientation φ. In Eq. 9 a normal-
ization similar to Eq. 7 is applied. To quantify the
improvement caused by the iterative grouping mech-
anism we report the orientation error for a scene with
existing ground-truth motion, shown in Fig. 4(B).
Combination of Motion Responses with Streaks
and Attentional Signal. A general motivation for
the need of an attentional signal in many applica-
tions of computer vision is given in (Rothenstein and
Tsotsos, 2007), suggesting that an attentional sig-
nal reduces the complexity for visual search tasks.
Here, the activity of motion direction is multiplica-
tively combined with the grouped activity of motion
streaks, each serving as an attentional signal. For
an combination activities corresponding to orienta-
tions are replicated
ˆ
A
streak,dir
ψ
= {
ˆ
A
streak,ori
φ
,
ˆ
A
streak,ori
φ+π
},
by this means that one orientation votes for the two
corresponding directions. The final multiplication
A
comb,dir
ψ
= A
motion,dir
ψ
·
ˆ
A
streak,dir
ψ
are motivated for two
reasons: (i) activities corresponding to a specific
direction from streaks and motion are independent
sources, (ii) streak activity acts as a bias for motion
activity or vice versa.
Coherence and Attentional Signals. The combined
activity is used for the computation of a coherence
signal, based on large patches with similar move-
ments. Therefore, a maximum likelihood estimate is
calculated from the ensemble (population) of activi-
ties (Deneve et al., 1999), given by
x
y
=
∑
ψ
A
comb,dir
ψ
cosψ
sinψ
/
∑
ψ
A
comb,dir
ψ
, (10)
with the direction Ψ
comb,dir
= arctan2(y,x) ∈ (−π,π],
where arctan2 denotes the four quadrant inverse tan-
gent. Coherent motion
C =k
cos(Ψ
comb,dir
) ∗ G
σ
coh
sin(Ψ
comb,dir
) ∗ G
σ
coh
k
2
(11)
is detected by large integrating Gaussian filter kernels
(σ
coh
=11.25). As in Fig. 1 all three attentive signals,
namely the flow magnitude R, the streak intensity S,
and the coherence of directions C, are normalized and
multiplied to provide the final attentional signal. This
multiplication is a simple mechanism to avoid addi-
tional complexity. The mechanism could be extended
by incorporating weighing factors for the three atten-
tional signals.
4 PROCESSING RESULTS AND
EVALUATION
Results are presented for motion detection and for
motion streak integration. Subsequently, we present
BIOLOGICALLY INSPIRED ATTENTIVE MOTION ANALYSIS FOR VIDEO SURVEILLANCE
647

an evaluation of our model for the task of video
surveillance.
Motion Detection.Here, results for the Hamburg
Taxi Sequence are shown (http://i21www.ira.uka.de,
03/2007). In this scene the background flickers, and
the main attentive motion signals which should be de-
tected are the movement of the cars and the pedes-
trian. The activity code of the flow field is shown in
Fig. 2. Activity representing the motion of the ve-
hicles are present in several maps, due to the broad
tuning. For example, the car approaching from the
left side induces activity in four neighboring maps,
according to the directions ψ = 0,π/8, 14π/8, 15π/8
(compare with Fig. 2).
Figure 2: Motion activity for the Hamburg Taxi Sequence.
Activities are normalized and linearly coded from black
(zero activity) to white (unit activity).
Motion Streak Integration. Fig. 3(A) shows the last
frame of the Hamburg Taxi sequence and Fig. 3 (B)
shows the streak image. Additionally, lines are su-
perimposed on this streak image, where the length re-
flects the streak intensity and the orientation results
from the texture analysis. Therefore, the activities
ˆ
A
streak,ori
φ
corresponding to orientations φ are inter-
preted as described in Eq. 10, where directions ψ
are substituted by orientations φ. The resulting ori-
entation Φ defines a vector (cos(Φ),sin(Φ)) which
is weighted with the streak intensity S, forming the
lines.
(A)
(B)
Figure 3: Motion streak image: (A) Last frame of the Ham-
burg Taxi sequence. (B) Temporally integration of fea-
tures produces the streak image, where the extracted and
grouped orientation of the streaks is superimposed by lines
(41 frames, 10 iterations, sampled 15 times).
(A)
1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
10
iteration
orientation error [°]
(B)
mean
median
Figure 4: Motion streaks for Yosemite sequence with
clouds: (A) Streak lines with superimposed extracted ori-
entations from texture and grouping (15 frames used for in-
tegration, 10 iterations, sampled 15 times). (B) Decreasing
error over iterations of grouping.
Figure 5: Masked last frame of sequences: (A) Durlacher
Tor. (B) Indoor. Attentional regions are plotted with full
intensity and the background with an intensity of at most
thirty percent.
In general the construction of a motion streak im-
age and the analysis of the streak texture for orien-
tations is not restricted to object motion. Thus, we
present results for an ego-motion sequence, a simu-
lated flight through the valley of the Yosemite park.
Temporal integration results in the motion streak im-
age in Fig.4(A). From this characteristic streak tex-
ture the orientation is determined and former refined
by grouping. The final result (lines) is superimposed
to the streak texture. To show the effect of iterative
grouping the mean and median orientation error are
reported in Fig. 4 (B). This orientation error is defined
as the deviation between the ground-truth orientation
and the estimated orientation. After only few itera-
tions (approx. five) of recurrent grouping this error
saturates at the level of 3.9 deg median and 6.3deg
mean.
Evaluation for Video Surveillance. For video
surveillance an evaluation based on four different se-
quences has been conducted (results are shown only
for two of them). In this evaluation regions with atten-
tive motion should be correctly detected which refer
to suspicious activity. Accordingly, those regions are
masked in the last frame of the processed sequence,
shown in Fig. 5. The first scene is a characteristic
traffic scenario, the second a typical indoor sequence
(from (Brown et al., 2005)).
For the evaluation of robustness receiver operator
characteristics (ROC) with decisions at pixel level are
investigated. Within this analysis the false positive
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
648
ratio is defined as FPR =k N
det
attentive
\ N
gt
attentive
k / k
N
gt
inattentive
k where N
det
attentive
is the set of pixels de-
tected as salient, N
gt
attentive
is the set of salient pix-
els according to the masked regions, and N
gt
inattentive
for inattentive pixels. The numerator contains the set
difference between N
det
attentive
and N
gt
attentive
. A FPR of
zero indicates that no inattentive pixel is detected as
salient. The true positive ratio is defined as TPR =k
N
det
attentive
k / k N
gt
attentive
k. In our model the attentional
signal is finally thresholded, as the only decision pa-
rameter that needs to be adjusted in the algorithm.
In the algorithm of (Tian and Hampapur, 2005) the
parameter T
d
that is applied to the accumulated tem-
poral difference image is critical and is therefore se-
lected as reference parameter in the ROC analysis.
Additionally, the parameter W
accum
for the weighted
summation of the accumulated temporal difference
seems critical. For this reason we applied the analysis
for two representative values W
accum
= 0.5 (as stated
in (Tian and Hampapur, 2005)) and W
accum
= 0.125.
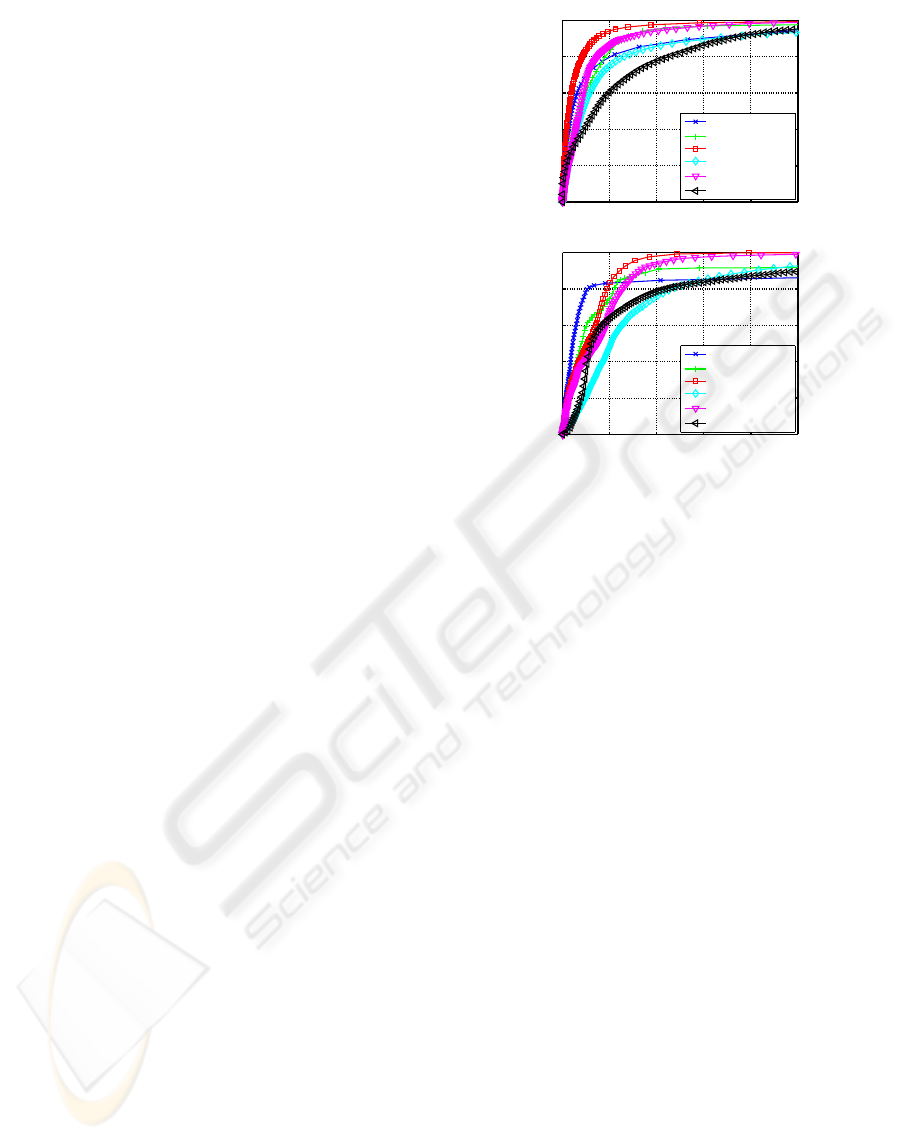
In Fig. 6 results for the analysis are shown. Be-
side this, results for the attentive signals from streak
saliency
˜
S, motion saliency
˜
R, saliency from coher-
ence
˜
C, and their multiplicative conjunction are vi-
sualized, where the symbol ’tilde’ imposes that the
signals are scaled to the interval [0,1]. For the traffic
scene (Fig. 6(A)) our model performs better than that
of (Tian and Hampapur, 2005) and in the second se-
quence our model performs better for specific ratios
of FPR/TPR. Another measure is the area under the
ROC curve, where the our model has the best perfor-
mance value for the traffic sequence (0.982) and for
the indoor sequence (0.970). For the method of (Tian
and Hampapur, 2005) the calculation of the area un-
der the ROC curve is not possible due to the two vari-
able thresholds W
accum
and T
d
.
5 DISCUSSION
The model proposed in this contribution follows the
main idea of (Tsotsos et al., 2005) for the decom-
position of an image sequence into single features
(here the channels intensity, texture, flow direction,
and magnitude) and their re-combination into an at-
tention signal. In contrast to the approach of (Tsotsos
et al., 2005), which suggests a feed-forward process-
ing pyramid, our model contains feedback signals in
the grouping stage.
For the construction of motion streaks a related
idea was reported in (Majchrzak et al., 2000). Unlike
to our approach the authors simply add the images in
a specific time window. Then they extract edges in
the resulting motion streak image. On the basis of
0 0.05 0.1 0.15 0.2 0.25
0
0.2
0.4
0.6
0.8
1
False Positive Ratio
True Positive Ratio
(A)
Tian W
accum
=1/2
Tian W
accum
=1/8
Neural Model (0.982)
Streaks S
~
(0.934)
Magnitude R
~
(0.968)
Coherence C
~
(0.933)
0 0.05 0.1 0.15 0.2 0.25
0
0.2
0.4
0.6
0.8
1
False Positive Ratio
True Positive Ratio
(B)
Tian W
accum
=1/2
Tian W
accum
=1/8
Neural Model (0.970)
Streaks S
~
(0.913)
Magnitude R
~
(0.957)
Coherence C
~
(0.912)
Figure 6: ROC analysis: (A) Durlacher Tor (frames 11-21).
(B) Indoor, (frames 45-55, parameter σ
pre
=2). Our model
constructs the attentive signals streaks
˜
S, magnitude
˜
R, co-
herence
˜
C, and a combination denoted by the neural model.
The x-axis ranges from 0 to 0.25. Values in brackets denote
the area under the ROC curve.
the orientation of these edges they define a decision
mechanism to differentiate between a rotational field,
sidewards translation, or a translation near the line of
sight (FOE/FOC). Compared to our method, the fea-
ture extraction and subsequent weighted integration
results in more salient streaks. For this specific streak
texture we then extracted and grouped orientations. A
heading estimation on the basis of these orientations
as proposed by (Majchrzak et al., 2000) is also possi-
ble.
Our model behaves robust compared to assump-
tions in video surveillance: First, the assumption of
directionally-consistent movements or coherent tem-
poral motion (Wixson and Hansen, 1999; Tian and
Hampapur, 2005), which is here included within the
temporal integration for the construction of the streak
image. If this assumption is not fulfilled the streak in-
tensity and flow magnitude supports an attention sig-
nal. Second, non-stationary backgrounds (like wig-
gling trees, waves, fountains, rain, snow) are as-
sumed. Generally, those backgrounds are outlined
through spatial and temporal statistics (Ren et al.,
2003; Zhang et al., 2007). Within this predictive
mechanism only the most important variations are
captured through a sub-space analysis of the input se-
quence. Our method outlines distracting background
movements by temporal smoothing and integration.
BIOLOGICALLY INSPIRED ATTENTIVE MOTION ANALYSIS FOR VIDEO SURVEILLANCE
649

6 CONCLUSIONS
The proposed model combines information from mo-
tion streaks and image flow, forming the signals mag-
nitude of image flow, intensity of motion streaks, and
coherence of motion directions. These three signals
are combined for the final attention signal. An ROC
analysis for scenarios of video surveillance is con-
ducted and shows that three attentive signals and the
final signal are appropriate for the division between
attentive motion and background noise. Compared
with the method of (Tian and Hampapur, 2005) our
model has only one critical threshold and shows bet-
ter results for two analyzed scenes. Main challenges
solved by our model are the robust processing and
analysis of noisy background and locally incoherent
motions of walking persons.
Within our model motion streaks are used, which
provide information about orientation and speed for
object and self-motion. In addition to the approach
of (Majchrzak et al., 2000) our model provides a
dense field of orientations and speeds. Therefore, mo-
tion streaks could serve as a robustprior or bias for the
estimation of image flow and also for the estimation
of ego-motion. Future work will pursue incorpora-
tions of motion streaks into those estimation tasks.
ACKNOWLEDGEMENTS
This work is supported by the Graduate School
Mathematical Analysis of Evolution, Information and
Complexity.
REFERENCES
Barron, J., Fleet, D., and Beauchemin, S. (1994). Perfor-
mance of optical flow techniques. IJCV, pages 43–77.
Brown, L., Senior, A., Tian, Y.-L., Connell, J., Hampapur,
A., Shu, C.-F., Merkl, H., and Lu, M. (2005). Perfor-
mance evaluation of surveillance systems under vary-
ing conditions. IEEE Int’l Workshop on Performance
Evaluation of Tracking and Surveillance.
Daugman, J. (1988). Complete discrete 2-D Gabor trans-
forms by neural networks for image analysis and com-
pression. Trans. Acoustics, Speech, and Signal Proc.,
26(7):1169–1179.
Deneve, S., Latham, P., and Pouget, A. (1999). Reading
population codes: a neural implementation of ideal
observers. Nature Neuroscience, 2:740–745.
F¨orstner, W. (1986). A feature based correspondence algo-
rithm for image matching. ISP Comm. III, Rovaniemi
1986, International Archives of Photogrammetry,
pages 26–3/3.
Hubel, D. and Wiesel, T. (1968). Receptive fields and func-
tional architecture of monkey striate cortex. J. Phys-
iol., (195):215–243.
Lucas, B. and Kanade, T. (1981). An iterative image regis-
tration technique with an application to stereo vision.
Proc. DARPA Image Understanding Workshop, pages
121–130.
Majchrzak, D., Sarkar, S., Sheppard, B., and Murphy, R.
(2000). Motion detection from temporally integrated
images. In Proc. IEEE 15th ICPR, pages 836–839.
Marr, D. and Ullman, S. (1981). Direction selectivity and
its use in early visual processing. Proc. Royal Soc. of
London, B, 211:151–180.
Neumann, H. and Sepp, W. (1999). Recurrent V1-V2 in-
teraction in early visual boundary processing. Biol.
Cybernetics, 81:425–444.
Ren, Y., Chua, C.-S., and Ho, Y.-K. (2003). Motion detec-
tion with nonstationary background. Machine Vision
and Applications, 13:332–343.
Rothenstein, A. and Tsotsos, J. (2007). Attention links sens-
ing to recognition. Image and Vision Computing. (in
press).
Tian, Y.-L. and Hampapur, A. (2005). Robust salient mo-
tion detection with complex background for real-time
video surveillance. Proc. IEEE Workshop on Motion
and Video Computing, pages 30–35.
Tsotsos, J., Liu, Y., Martinze-Trujiloo, J., Pomplun, M.,
Simine, E., and Zhou, K. (2005). Attending to visual
motion. Computer Vision and Image Understanding,
100:3–40.
Weidenbacher, U., Bayerl, P., Neumann, H., and Flemming,
R. (2006). Sketching shiny surfaces: 3D shape extrac-
tion and depicting of specular surfaces. ACM Trans.
on Applied Perception, 3:262–285.
Wixson, L. and Hansen, M. (1999). Detecting salient mo-
tion by accumulating directionally-consistent flow. In
Proc. of the Seventh IEEE ICCV, pages 797–804.
Zhang, W., Fang, X., Yang, X., and Wu, Q. (2007). Spa-
tiotemporal gaussian mixture model to detect moving
objects in dynamic scenes. J. of Electronic Imaging,
16.
Zhou, Q. and Aggarwal, J. (2001). Tracking and classifying
moving objects from video. In IEEE Int. Workshop on
PETS.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
650
