
TRA
CK AND CUT: SIMULTANEOUS TRACKING AND
SEGMENTATION OF MULTIPLE OBJECTS WITH GRAPH CUTS
Aur
´
elie Bugeau and Patrick P
´
erez
INRIA, Centre Rennes - Bretagne Atlantique, Campus Universitaire de Beaulieu, 35042 Rennes Cedex, France
Keywords:
Tracking, Graph Cuts.
Abstract:
This paper presents a new method to both track and segment multiple objects in videos using min-cut/max-flow
optimizations. We introduce objective functions that combine low-level pixel-wise measures (color, motion),
high-level observations obtained via an independent detection module (connected components of foreground
detection masks in the experiments), motion prediction and contrast-sensitive contextual regularization. One
novelty is that external observations are used without adding any association step. The minimization of these
cost functions simultaneously allows ”detection-before-track” tracking (track-to-observation assignment and
automatic initialization of new tracks) and segmentation of tracked objects. When several tracked objects get
mixed up by the detection module (e.g., single foreground detection mask for objects close to each other), a
second stage of minimization allows the proper tracking and segmentation of these individual entities despite
the observation confusion. Experiments on sequences from PETS 2006 corpus demonstrate the ability of the
method to detect, track and precisely segment persons as they enter and traverse the field of view, even in cases
of occlusions (partial or total), temporary grouping and frame dropping.
1 INTRODUCTION
Visual tracking is an important and challenging prob-
lem. Depending on applicative context under con-
cern, it comes into various forms (automatic or man-
ual initialization, single or multiple objects, still or
moving camera, etc.), each of which being associated
with an abundant literature. In a recent review on vi-
sual tracking (Yilmaz et al., 2006), tracking methods
are divided into three categories: point tracking, sil-
houette tracking and kernel tracking. These three cat-
egories can be recast as ”detect-before-track” track-
ing, dynamic segmentation and tracking based on dis-
tributions (color in particular).
The principle of ”detect-before-track” methods is
to match the tracked objects with observations pro-
vided by an independent detection module. Such a
tracking can be performed with either deterministic or
probabilistic methods. Deterministic methods amount
to matching by minimizing a distance based on cer-
tain descriptors of the object. Probabilistic methods
provide means to take measurement uncertainties into
account and are often based on a state space model of
the object properties.
Dynamic segmentation aims to extract successive
segmentations over time. A detailed silhouette of the
target object is thus sought in each frame. This is
often done by making evolve the silhouette obtained
in the previous frame towards a new configuration
in current frame. It can be done using a state space
model defined in terms of shape and motion parame-
ters of the contour (Isard and Blake, 1998; Terzopou-
los and Szeliski, 1993) or by the minimization of a
contour energy functional. The contour energy in-
cludes temporal information in the form of either tem-
poral gradients (optical flow) (Bertalmio et al., 2000;
Cremers and C. Schn
¨
orr, 2003; Mansouri, 2002) or
appearance statistics originated from the object and
its surroundings in previous images (Ronfard, 1994;
Yilmaz, 2004). In (Xu and Ahuja, 2002) the authors
use graph cuts to minimize such an energy functional.
The advantages of min-cut/max-flow optimization are
its low computational cost, the fact that it converges
to the global minimum without getting stuck in local
minima and that no a priori on the global shape model
is needed.
In the last group of methods (“kernel tracking”),
the best location for a tracked object in the current
frame is the one for which some feature distribution
(e.g., color) is the closest to the reference one for the
447
Bugeau A. and Pérez P. (2008).
TRACK AND CUT: SIMULTANEOUS TRACKING AND SEGMENTATION OF MULTIPLE OBJECTS WITH GRAPH CUTS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 447-454
DOI: 10.5220/0001075704470454
Copyright
c
SciTePress

tracked object. The most popular method in this class
is the one of Comaniciu et al. (Comaniciu et al.,
2000; Comaniciu et al., 2003), where approximate
“mean shift” iterations are used to conduct the iter-
ative search. Graph cuts have also been used for illu-
mination invariant kernel tracking in (Freedman and
Turek, 2005).
These three types of tracking techniques have dif-
ferent advantages and limitations, and can serve dif-
ferent purposes. The ”detect-before-track” methods
can deal with the entries of new objects and the exit of
existing ones. They use external observations that, if
they are of good quality, might allow robust tracking.
However this kind of tracking usually outputs bound-
ing boxes only. By contrast, silhouette tracking has
the advantage of directly providing the segmentation
of the tracked object. With the use of recent graph
cuts techniques, convergence to the global minima is
obtained for modest computational cost. Finally ker-
nel tracking methods, by capturing global color dis-
tribution of a tracked object, allow robust tracking at
low cost in a wide range of color videos.
In this paper, we address the problem of mul-
tiple objects tracking and segmentation by combin-
ing the advantages of the three classes of approaches.
We suppose that, at each instant, the moving objects
are approximately known from a preprocessing al-
gorithm. Here, we use a simple background sub-
traction but more complex alternatives could be ap-
plied. An important novelty of our method is that
the use of external observations does not require the
addition of a preliminary association step. The as-
sociation between the tracked objects and the obser-
vations is jointly conducted with the segmentation
and the tracking within the proposed minimization
method. The connected components of the detected
foreground mask serve as high-level observations. At
each time instant, tracked object masks are propa-
gated using their associated optical flow, which pro-
vides predictions. Color and motion distributions are
computed on the objects segmented in previous frame
and used to evaluate individual pixel likelihood in
the current frame. We introduce for each object a
binary labeling objective function that combines all
these ingredients (low-level pixel-wise features, high-
level observations obtained via an independent detec-
tion module and motion predictions) with a contrast-
sensitive contextual regularization. The minimiza-
tion of each of these energy functions with min-
cut/max-flow provides the segmentation of one of the
tracked objects in the new frame. Our algorithm
also deals with the introduction of new objects and
their associated tracker. When multiple objects trig-
ger a single detection due to their spatial vicinity,
the proposed method, as most detect-before-track ap-
proaches, can get confused. To circumvent this prob-
lem, we propose to minimize a secondary multi-label
energy function which allows the individual segmen-
tation of concerned objects.
In section 2, notations are introduced and an
overview of the method is given. The primary en-
ergy function associated to each tracked object is in-
troduced in section 3. The introduction of new objects
and the handling of complete occlusions are also ex-
plained in this section. The secondary energy function
permitting the separation of objects wrongly merged
in the first stage is introduced in section 4. Exper-
imental results are reported in section 5, where we
demonstrate the ability of the method to detect, track
and precisely segment persons and groups, possibly
with partial or complete occlusions and missing ob-
servations. The experiments also demonstrate that the
second stage of minimization allows the segmentation
of individual persons when spatial proximity makes
them merge at the foreground detection level.
2 PRINCIPLE AND NOTATIONS
In all this paper, P will denote the set of N pixels of
a frame from an input image sequence. To each pixel
s of the image at time t is associated a feature vector
z
s,t
= (z
(C)
s,t
,z
(M)
s,t
), where z
(C)
s,t
is a 3-dimensional vector
in RGB color space and z
(M)
s,t
is a 2-dimensional vector
of optical flow values. Using an incremental multi-
scale implementation of Lucas and Kanade algorithm
(Lucas and Kanade, 1981), the optical flow is in fact
only computed at pixels with sufficiently contrasted
surroundings. For the other pixels, color constitutes
the only low-level feature. However, for notational
convenience, we shall assume in the following that
optical flow is available at each pixel.
We assume that, at time t, k
t
objects are tracked.
The i
th
object at time t is denoted as O
(i)
t
and is defined
as a mask of pixels, O
(i)
t
⊂ P .
The goal of this paper is to perform both seg-
mentation and tracking to get the object O
(i)
t
corre-
sponding to the object O
(i)
t−1
of previous frame. Con-
trary to sequential segmentation techniques (Juan and
Boykov, 2006; Kohli and Torr, 2005; Paragios and
Deriche, 1999), we bring in object-level “observa-
tions”. They may be of various kinds (e.g., obtained
by a class-specific object detector, or motion/color de-
tectors). Here we consider that these observations
come from a preprocessing step of background sub-
traction. Each observation amounts to a connected
component of the foreground map after background
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
448
subtraction (figure 1). The connected components are
obtained using the ”gap/mountain” method described
in (Wang et al., 2000) and ignoring small objects. For
the first frame, the tracked objects are initialized as
the observations themselves. We assume that, at each
time t, there are m
t
observations. The j
th
observation
at time t is denoted as M
( j)
t
and is defined as a mask
of pixels, M
( j)
t
⊂ P . Each observation is characterized
by its mean feature vector:
z
( j)
t
=
∑
s∈M
( j)
t
z
s,t
|M
( j)
t
|
. (1)
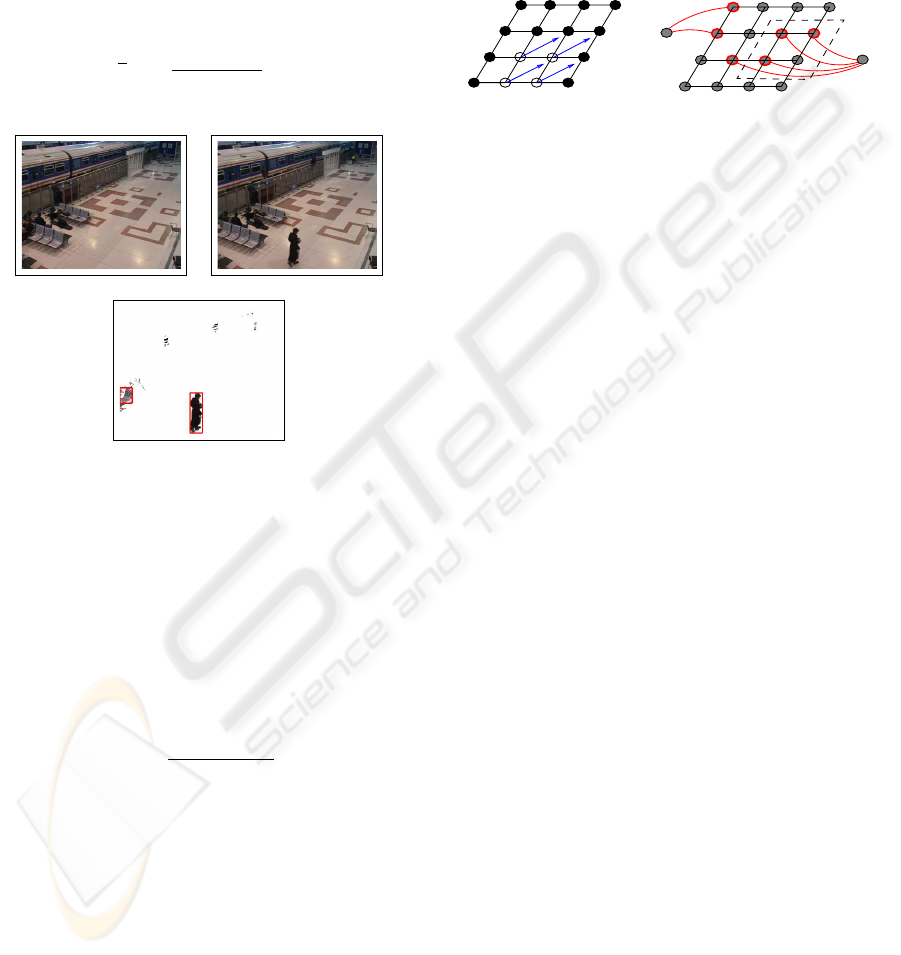
(a) (b)
(c)
Figure 1: Observations obtained with background subtrac-
tion. (a) Reference frame. (b) Current frame. (c) Result of
background subtraction (pixels in black are labeled as fore-
ground) and derived object detections (indicated with red
bounding boxes).
The principle of our algorithm is as follows. A
prediction O
(i)
t|t−1
⊂ P is made for each object i of time
t − 1. We denote as d
(i)
t−1
the mean, over all pixels of
the object at time t − 1, of optical flow values:
d
(i)
t−1
=
∑
s∈O
(i)
t−1
z
(M)
s,t−1
|O
(i)
t−1
|
. (2)
The prediction is obtained by translating each pixels
belonging to O
(i)
t−1
by this average optical flow:
O
(i)
t|t−1
= {s + d
(i)
t−1
,s ∈ O
(i)
t−1
} . (3)
Using this prediction, the new observations, as
well as color and motion distributions of O
(i)
t−1
, an en-
ergy function is built. The energy is minimized using
min-cut/max-flow algorithm (Boykov et al., 2001),
which gives the new segmented object at time t, O
(i)
t
.
The minimization also provides the correspondences
of the object with all the available observations.
3 ENERGY FUNCTIONS
We define one tracker for each object. To each tracker
corresponds, for each frame, one graph and one en-
ergy function that is minimized using the min-cut/
max-flow algorithm (Boykov et al., 2001). Nodes and
edges of the graph can be seen in figure 2.
n
(1)
t
n
(2)
t
Object i at time t-1
O
(i)
t|t−1
Graph for object i at time t
Figure 2: Description of the graph. The left figure is the re-
sult of the energy minimization at time t − 1. White nodes
are labeled as object and black nodes as background. The
optical flow vectors for the object are shown in blue. The
right figure shows the graph at time t. Two observations
are available, each of which giving rise to a special “obser-
vation” node. The pixel nodes circled in red correspond to
the masks of these two observations. Dashed box indicates
predicted mask.
3.1 Graph
The undirected graph G
t
= (V
t
,E
t
) is defined as a set
of nodes V
t
and a set of edges E
t
. The set of nodes
is composed of two subsets. The first subset is the
set of N pixels of the image grid P . The second sub-
set corresponds to the observations: to each obser-
vation mask M
(
j
)
t
is associated a node n
(
j
)
t
. We call
these nodes ”observation nodes”. The set of nodes
thus reads V
t
= P
S
m
t
j=1
n
( j)
t
. The set of edges is di-
vided in two subsets: E
t
= E
P
S
m
t
j=1
E
M
( j)
t
. The set E
P
represents all unordered pairs {s,r} of neighboring el-
ements of P , and E
M
( j)
t
is the set of unordered pairs
{s,n
( j)
t
}, with s ∈ M
( j)
t
.
Segmenting the object O
(i)
t
amounts to assigning a
label l
(i)
s,t
, either background, ”bg”, or object, “fg”, to
each pixel node s of the graph. Associating observa-
tions to tracked objects amounts to assigning a binary
label l
(i)
j,t
(“bg” or “fg”) to each observation node n
( j)
t
.
The set of all the node labels forms L
(i)
t
.
3.2 Energy
An energy function is defined for each object at each
instant. It is composed of unary data terms R
(i)
s,t
and
smoothness binary terms B
(i)
s,r,t
:
E
(i)
t
(L
(i)
t
) =
∑
s∈V
t
R
(i)
s,t
(l
(i)
s,t
) +
∑
{s,r}∈E
t
B
(i)
s,r,t
(1 − δ(l
(i)
s,t
,l
(i)
r,t
)) (4)
TRACK AND CUT: SIMULTANEOUS TRACKING AND SEGMENTATION OF MULTIPLE OBJECTS WITH
GRAPH CUTS
449

3.2.1 Data Term
The data term only concerns the pixel nodes lying in
the predicted regions and the observation nodes. For
all the other pixel nodes, labeling will only be con-
trolled by the neighbors via binary terms. More pre-
cisely, the first part of energy in (4) reads:
∑
s∈V
t
R
(i)
s,t
(l
(i)
s,t
) =
∑
s∈O
(i)
t|t−1
−ln(p
(i)
1
(s,l
(i)
s,t
))+
m
t
∑
j=1
−ln(p
(i)
2
( j,l
j,t
)) .
(5)
Segmented object at time t should be similar, in
terms of motion and color, to the preceding instance
of this object at times t − 1. To exploit this consis-
tency assumption, color and motion distributions of
the object and the background are extracted from pre-
vious image. The distribution p
(i,C)
t−1
for color, respec-
tively p
(i,M)
t−1
for motion, is a Gaussian mixture model
fitted to the set of values {z
(C)
s,t−1
}
s∈O
(i)
t−1
, respectively
{z
(M)
s,t−1
}
s∈O
(i)
t−1
. Under independency assumption for
color and motion, the likelihood of individual pixel
feature z
s,t
according to previous joint model is:
p
(i)
t−1
(z
s,t
) = p
(i,C)
t−1
(z
(C)
s,t
) p
(i,M)
t−1
(z
(M)
s,t
) . (6)
The two distributions for the background are q
(i,M)
t−1
and q
(i,C)
t−1
. They are Gaussian mixture models built
on the sets {z
(M)
s,t−1
}
s∈P \O
(i)
t−1
and {z
(C)
s,t−1
}
s∈P \O
(i)
t−1
respec-
tively. Foreground likelihood at pixel s then reads:
q
(i)
t−1
(z
s,t
) = q
(i,C)
t−1
(z
(C)
s,t
) q
(i,M)
t−1
(z
(M)
s,t
) . (7)
The likelihood p
1
, invoked in (5) within predicted
region, can now be defined as:
p
(i)
1
(s,l) =
p
(i)
t−1
(z
s,t
) if l = “fg”,
q
(i)
t−1
(z
s,t
) if l = “bg” .
(8)
An observation should be used only if it is likely
to correspond to the tracked object. Therefore, we use
a similar definition for p
2
. However we do not eval-
uate the likelihood of each pixel of the observation
mask but only the one of its mean feature z
( j)
t
. The
likelihood p
2
for the observation node n
( j)
t
is defined
as:
p
(i)
2
( j,l) =
p
(i)
t−1
(z
( j)
t
) if l = “fg”,
q
(i)
t−1
(z
( j)
t
) if l = “bg” .
(9)
3.2.2 Binary Term
Following (Boykov and Jolly, 2001), the binary term
between neighboring pairs of pixels {s, r} of P is
based on color gradients and has the form
B
(i)
s,r,t
= λ
1
1
dist(s,r)
e
−
kz
(C)
s,t
−z
(C)
r,t
k
2
σ
2
T
. (10)
As in (Blake et al., 2004), the parameter σ
T
is set to
σ
T
= 4 · h(z
(i,C)
s,t
− z
(i,C)
r,t
)
2
i, where h.i denotes expecta-
tion over a box surrounding the object. For edges be-
tween one pixel node and one observation node, the
binary term is similar:
B
(i)
s,n
( j)
t
,t
= λ
2
e
−
kz
(C)
s,t
−z
( j,C)
t
k
2
σ
2
T
. (11)
Parameters λ
1
and λ
2
are discussed in the experi-
ments.
3.2.3 Energy Minimization
The final labeling of pixels is obtained by minimizing
the energy defined above:
ˆ
L
(i)
t
= argmin
L
(i)
t
E
(i)
t
(L
(i)
t
). (12)
This labeling gives the segmentation of the i-th object
at time t as:
O
(i)
t
= {s ∈ P :
ˆ
l
(i)
s,t
= “fg”}. (13)
3.3 Handling Complete Occlusions
When the number of pixels belonging to a tracked ob-
ject becomes equal to zero, this object is likely to have
disappeared due to either its exit of the field of view
or its complete occlusion. If it is occluded, we want
to recover it as soon as it reappears. Let t
o
be the time
at which the size drops to zero, and S
(i)
t
be the size of
object i at time t. The simplest way to handle occlu-
sions is to keep predicting the object using informa-
tion available just before its complete disappearance:
O
(i)
t|t−1
= {s + (t − t
o
+ 1)d
(i)
t
o
−1
,s ∈ O
(i)
t
o
−1
} ,t > t
o
,
(14)
and minimizing the energy function with
p
(i)
t−1
≡ p
(i)
t
o
−1
, q
(i)
t−1
≡ q
(i)
t
o
−1
. (15)
However, before being completely occluded, an
object is usually partially occluded, which influences
its shape, its motion and the feature distributions.
Therefore, using only information at time t
0
− 1 is not
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
450

sufficient and a more complex scheme must be ap-
plied. To this end, we try to find the instant t
p
at which
the object started to be occluded. A Gaussian distribu-
tion N (S
(i)
,σ
(i)
S
) on the size of the object is built and
updated at each instant. If |N (S
(i)
t
;S
(i)
,σ
(i)
S
) − S
(i)
| <
3σ
(i)
S
, then we consider that the object is partially oc-
cluded and t
p
= t − 1. The prediction and the distri-
butions are finally built on averages over the 5 frames
before t
p
:
O
(i)
t|t−1
= {s +
t −t
p
+ 1
5
t
p
∑
t
0
=t
p
−5
d
(i)
t
0
,s ∈ O
(i)
t
p
}, (16)
while the distributions p
(i)
t−1
and q
(i)
t−1
are now Gaussian
mixture models fitted on sets {z
s,t
0
}
t
0
=t
p
−5...t
p
, s∈O
(i)
t
0
and {z
s,t
0
}
t
0
=t
p
−5...t
p
, s∈P \O
(i)
t
0
respectively. Specific mo-
tion models depending on the application could have
been used but this falls beyond the scope of the paper.
3.4 Creation of New Objects
One advantage of our approach lies in its ability to
jointly manipulate pixel labels and track-to-detection
assignment labels. This allows the system to track and
segment the objects at time t while establishing the
correspondence between an object currently tracked
and all the approximative object candidates obtained
by detection in current frame. If, after the energy min-
imization for an object i, an observation node n
( j)
t
is
labeled as “fg” it means that there is a correspondence
between the i-th object and the j-th observation. If for
all the objects, an observation node is labeled as “bg”
(∀i,
ˆ
l
(i)
t, j
= “bg”), then the corresponding observation
does not match any object. In this case, a new object
is created and initialized with this observation.
4 SEGMENTING MERGED
OBJECTS
Assume now that the results of the segmentations for
different objects overlap, that is ∩
i∈F
O
(i)
t
6=
/
0, where F
denotes the current set of object indices. In this case,
we propose an additional step to determine whether
these objects truly correspond to the same one or if
they should be separated. At the end of this step,
each pixel of ∩
i∈F
O
(i)
t
must belong to only one ob-
ject. For this purpose, a new graph
˜
G
t
= (
˜
V
t
,
˜
E
t
) is
created, where
˜
V
t
= ∪
i∈F
O
(i)
t
and
˜
E
t
is composed of
all unordered pairs of neighboring pixel nodes of
˜
V
t
.
The goal is then to assign to each node s of
˜
V
t
a label
ψ
s
∈ F . Defining
˜
L = {ψ
s
,s ∈
˜
V
t
} the labeling of
˜
V
t
, a
new energy is defined as:
˜
E
t
(
˜
L) =
∑
s∈
˜
V
t
−ln(p
3
(s,ψ
s
))
+ λ
3
∑
{s,r}∈
˜
E
t
1
dist(s,r)
e
−
kz
(C)
s
−z
(C)
r
k
2
σ
2
3
(1 − δ(ψ
s
,ψ
r
)).
(17)
The parameter σ
3
is here set as σ
3
= 4 ·
h(z
(i,C)
s,t
− z
(i,C)
r,t
)
2
i with the averaging being over i ∈ F
and {s,r} ∈
˜
E. The fact that several objects have been
merged shows that their respective feature distribu-
tions at previous instant did not permit to distinguish
them. A way to separate them is then to increase the
role of the prediction. This is achieved by choosing
function p
3
as:
p
3
(s,ψ) =
(
p
(ψ)
t−1
(z
s,t
) if s /∈ O
(ψ)
t|t−1
,
1 otherwise .
(18)
This multi-label energy function is minimized us-
ing the α-expansion and the swap algorithms (Boykov
et al., 1998; Boykov et al., 2001). After this mini-
mization, the objects O
(i)
t
,i ∈ F are updated.
5 EXPERIMENTAL RESULTS
In this section we present various results on a se-
quence from the PETS 2006 data corpus (sequence
1 camera 4). The robustness to partial occlusions and
the individual segmentation of objects that were ini-
tially merged, are first demonstrated. Then we present
the handling of missing observations and of complete
occlusions on other parts of the video. Following
(Blake et al., 2004), the parameter λ
3
was set to 20.
However parameters λ
1
and λ
2
had to be tuned by
hand to get better results. Indeed λ
1
was set to 10
while λ
2
to 2. Also, the number of classes for the
Gaussian mixture models was set to 10.
(a) (b)
Figure 3: Reference frames. (a) Reference frame for sub-
sections 5.1 and 5.2. (b) Reference frame for subsection
5.3.
TRACK AND CUT: SIMULTANEOUS TRACKING AND SEGMENTATION OF MULTIPLE OBJECTS WITH
GRAPH CUTS
451

5.1 Observations at Each Time
First results (figure 4) demonstrate the good behavior
of our algorithm even in the presence of partial oc-
clusions and of object fusion. Observations, obtained
by subtracting reference frame (frame 10 shown on
figure 3(a)) to the current one, are visible in the first
column of figure 4. The second column contains the
segmentation of the objects with the use of the second
energy function. Each tracked object is represented
by a different color. In frame 81, two objects are
initialized using the observations. Note that the con-
nected component extracted with the “gap/mountain”
method misses the legs for the person in the upper
right corner. While this impacts the initial segmen-
tation, the legs are included in the segmentation as
soon as the subsequent frame. Even if from the 102
nd
frame the two persons at the bottom of the frames cor-
respond to only one observation, our algorithm tracks
each person separately (frames 116, 146). Partial oc-
clusions occur when the person at the top passes be-
hind the three other ones (frames 176 and 206), which
is well handled by the method, as the person is still
tracked when the occlusion stops (frame 248).
In figure 5, we show in more details the influence
of the second energy function by comparing the re-
sults obtained with and without it. Before frame 102,
the three persons at the bottom generate three dis-
tinct observations while, passed this instant, they cor-
respond to only one or two observations. Even if the
motions and colors of the three persons are very close,
the use of the secondary multi-label energy function
allows their separation.
5.2 Missing Observations
On figure 6 we illustrate the capacity of the method
to handle missing observations thanks to the predic-
tion mechanism. In our test we have only performed
the background subtraction on one over three frames.
On figure 6, we compare the obtained segmentations
with the ones based on observations at each frame.
First column shows the intermittent observations, the
second one the masks of the objects obtained in case
of missing observations and the last one the masks
with observations at each time. Thanks to the predic-
tion, the results are only partially altered by this dras-
tic temporal subsampling of observations. As one can
see, even if one leg is missing in frames 805 and 806,
it is recovered as soon as a new observation is avail-
able. Conversely, this result also shows that the incor-
poration of observations from the detection module
enables to get better segmentations than when using
only predictions.
(a) (b)
Figure 4: Results on sequence from PETS 2006 (frames 81,
116, 146, 176, 206 and 248). (a) Result of simple back-
ground subtraction and extracted observations. (b) Tracked
objects on current frame using the secondary energy func-
tion.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
452
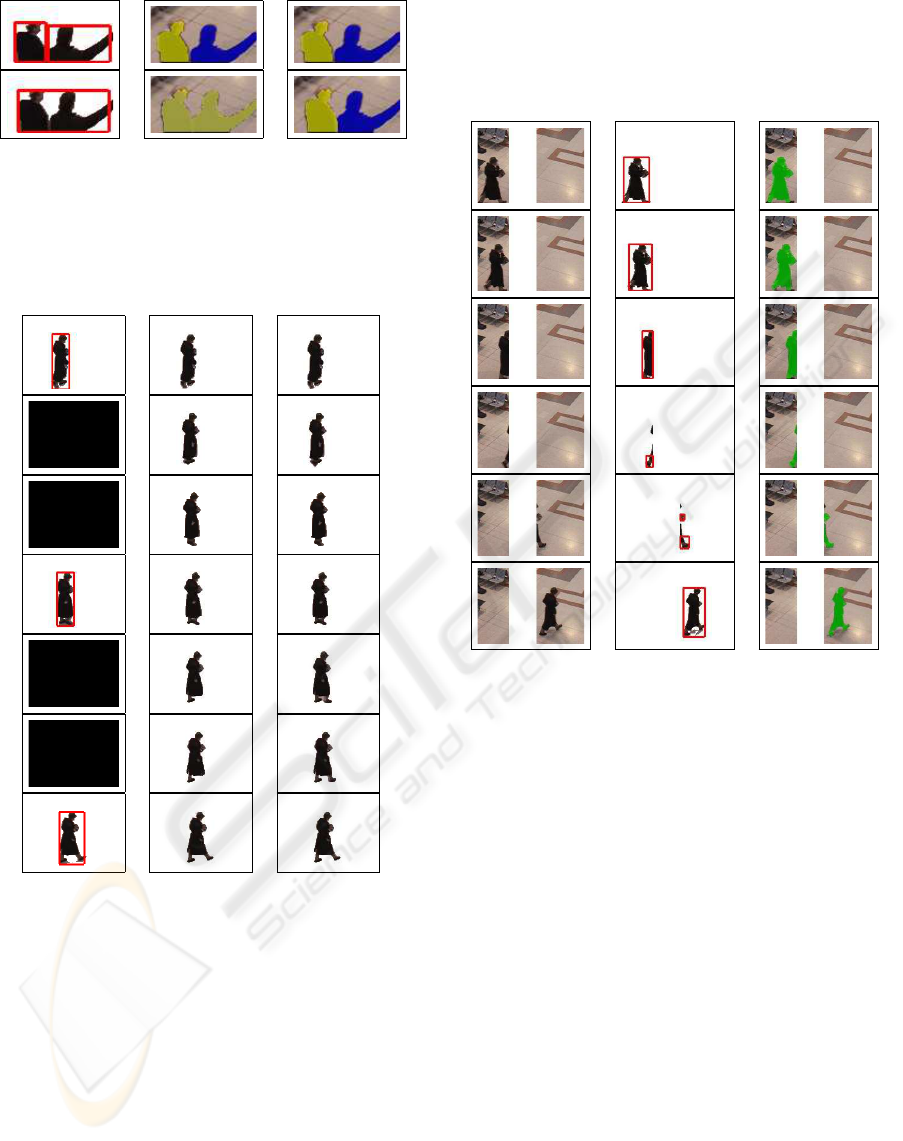
(a) (b) (c)
Figure 5: Separating merged objects with the secondary
minimization (frames 101 and 102). (a) Result of sim-
ple background subtraction and extracted observations. (b)
Segmentations with primary energy functions only. (c) Seg-
mentation after post-processing with the secondary energy
function.
(a) (b) (c)
Figure 6: Results with observations only every 3 frames
(frames 801 to 807) (a) Results of background subtraction
and extracted observations. (b) Masks of tracked object.
(c) Comparison with the masks obtained when there is no
missing observations.
5.3 Complete Occlusions
Results in figure 7 demonstrate the ability of our
method to deal with complete occlusions. In this por-
tion of the video, we added synthetically a vertical
white band in the images in order to generate com-
plete occlusions. The reference frame can be seen on
figure 3(b). On figure 7, the first column contains the
original images (with the white band), the second one
the observations and the last one the obtained segmen-
tations. Our algorithm keeps tracking and segmenting
the object as it progressively disappears and resumes
tracking and segmenting it as soon as it reappears.
(a) (b) (c)
Figure 7: Results with complete occlusions (frames 782,
785, 792, 798, 810 and 824) (a) Original frames. (b) Results
of background subtraction and extracted observations. (c)
Comparison with the masks obtained when there is not any
missing observations.
6 CONCLUSIONS
In this paper we have presented a new method to
simultaneously segment and track objects. Predic-
tions and observations, composed of detected objects,
are introduced in an energy function which is mini-
mized using graph cuts. The use of graph cuts per-
mits the segmentation of the objects at a modest com-
putational cost. A novelty is the use of observation
nodes in the graph which gives better segmentations
but also enables the direct association of the tracked
objects to the observations (without adding any as-
sociation procedure). The algorithm is robust to par-
tial and complete occlusions, progressive illumination
changes and to missing observations. Thanks to the
use of a secondary multi-label energy function, our
method allows individual tracking and segmentation
TRACK AND CUT: SIMULTANEOUS TRACKING AND SEGMENTATION OF MULTIPLE OBJECTS WITH
GRAPH CUTS
453

of objects which where not distinguished from each
other in the first stage. The observations used in this
paper are obtained by a simple background subtrac-
tion based on a single reference frame. Note however
that more complex background subtraction or object
detection could be used as well with no change to the
approach.
As we use feature distributions of objects at pre-
vious time to define current energy functions, our
method breaks down in extreme cases of abrupt il-
lumination changes. However, by adding an external
detector of such changes, we could circumvent this
problem by keeping only the prediction and updating
the reference frame when the abrupt change occurs.
Also, other cues, such as shapes, should probably be
added to improve the results.
Apart from this rather specific problem, several re-
search directions are open. One of them concerns the
design of an unifying energy framework that would
allow segmentation and tracking of multiple objects
while precluding the incorrect merging of similar ob-
jects getting close to each other in the image plane.
Another direction of research concerns the automatic
tuning of the parameters, which remains an open
problem in the recent literature on image labeling
(e.g., figure/ground segmentation) with graph-cuts.
REFERENCES
Bertalmio, M., Sapiro, G., and Randall, G. (2000). Morph-
ing active contours. IEEE Trans. Pattern Anal. Ma-
chine Intell., 22(7):733–737.
Blake, A., Rother, C., Brown, M., P
´
erez, P., and Torr, P.
(2004). Interactive image segmentation using an adap-
tive gmmrf model. In Proc. Europ. Conf. Computer
Vision.
Boykov, Y. and Jolly, M. (2001.). Interactive graph cuts for
optimal boundary and region segmentation of objects
in n-d images. Proc. Int. Conf. Computer Vision.
Boykov, Y., Veksler, O., and Zabih, R. (1998). Markov
random fields with efficient approximations. In Proc.
Conf. Comp. Vision Pattern Rec.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast approxi-
mate energy minimization via graph cuts. IEEE Trans.
Pattern Anal. Machine Intell., 23(11):1222–1239.
Comaniciu, D., Ramesh, V., and Meer, P. (2000). Real-
time tracking of non-rigid objects using mean-shift.
In Proc. Conf. Comp. Vision Pattern Rec.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based optical tracking. IEEE Trans. Pattern Anal. Ma-
chine Intell., 25(5):564–577.
Cremers, D. and C. Schn
¨
orr, C. (2003). Statistical shape
knowledge in variational motion segmentation. Image
and Vision Computing, 21(1):77–86.
Freedman, D. and Turek, M. (2005). Illumination-invariant
tracking via graph cuts. Proc. Conf. Comp. Vision Pat-
tern Rec.
Isard, M. and Blake, A. (1998). Condensation – conditional
density propagation for visual tracking. Int. J. Com-
puter Vision, 29(1):5–28.
Juan, O. and Boykov, Y. (2006). Active graph cuts. In Proc.
Conf. Comp. Vision Pattern Rec.
Kohli, P. and Torr, P. (2005). Effciently solving dynamic
markov random fields using graph cuts. In Proc. Int.
Conf. Computer Vision.
Lucas, B. and Kanade, T. (1981). An iterative technique of
image registration and its application to stereo. Proc.
Int. Joint Conf. on Artificial Intelligence.
Mansouri, A. (2002). Region tracking via level set pdes
without motion computation. IEEE Trans. Pattern
Anal. Machine Intell., 24(7):947–961.
Paragios, N. and Deriche, R. (1999). Geodesic active re-
gions for motion estimation and tracking. In Proc. Int.
Conf. Computer Vision.
Ronfard, R. (1994). Region-based strategies for active con-
tour models. Int. J. Computer Vision, 13(2):229–251.
Terzopoulos, D. and Szeliski, R. (1993). Tracking with
kalman snakes. Active vision, pages 3–20.
Wang, Y., Doherty, J., and Van Dyck, R. (2000). Mov-
ing object tracking in video. Applied Imagery Pattern
Recognition (AIPR) Annual Workshop.
Xu, N. and Ahuja, N. (2002). Object contour tracking us-
ing graph cuts based active contours. Proc. Int. Conf.
Image Processing.
Yilmaz, A. (2004). Contour-based object tracking with
occlusion handling in video acquired using mobile
cameras. IEEE Trans. Pattern Anal. Machine Intell.,
26(11):1531–1536.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM Comput. Surv., 38(4):13.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
454
