
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC
PROGRAMMING-BASED STEREO MATCHING
Michael Bleyer and Margrit Gelautz
Institute for Software Technology and Interactive Systems, Vienna University of Technology
Favoritenstrasse 9-11/188/2, A-1040 Vienna, Austria
Keywords:
Stereo matching, tree-based dynamic programming, fast stereo method.
Abstract:
This work describes a fast method for computing dense stereo correspondences that is capable of generating
results close to the state-of-the-art. We propose running a separate disparity computation process in each
image pixel. The idea is to root a tree graph on the pixel whose disparity needs to be reconstructed. The tree
thereby forms an individual approximation of the standard four-connected grid for this specific pixel. An exact
optimum of a predefined energy function on the applied tree structure is determined via dynamic programming
(DP), and the root pixel is assigned to the disparity of optimal costs. We present two simple tree structures
that allow for the efficient calculation of all trees’ optima with only four scanline-based DP passes. These
simple trees are designed to capture all pixels of the reference frame and incorporate horizontal and vertical
smoothness edges in order to weaken the scanline streaking problem inherent in DP-based approaches. We
evaluate our results using the Middlebury test set. Our algorithm currently ranks at the eighth position of
approximately 30 algorithms in the Middlebury database. More importantly, it is the currently best-performing
method that does not use image segmentation and is significantly faster than most competing algorithms. Our
method needs less than a second to determine the disparity map for typical stereo pairs.
1 INTRODUCTION
Stereo vision represents an inexpensive way for re-
constructing three-dimensional information from the
surrounding environment and is therefore of vital
importance for a large number of vision applica-
tions. Unfortunately, the key step in stereo vision,
i.e. the stereo matching problem, cannot be regarded
as solved. Factors that complicate the matching pro-
cess include image noise, untextured regions and the
occlusion problem. Although there is a large body
of literature, choosing a stereo algorithm for a practi-
cal application is still difficult. While state-of-the-art
methods are computationally rather demanding, fast
techniques generate significantly worse results. This
paper proposes an algorithm that represents a good
compromise between these conflicting requirements.
Stereo techniques are commonly divided between
local and global methods. Local algorithms are com-
putationally cheap, but they can typically not com-
pete with state-of-the-art results. We therefore fo-
cus our discussion on the latter category. A more
complete review of stereo methods is, however, given
in (Scharstein and Szeliski, 2002).
Global algorithms transform the stereo matching
task into an optimization problem. They seek for a
disparity map D that minimizes a predefined energy
functional E(D), which is typically in the form of
E(D) = E
data
(D) + E
smooth
(D). (1)
Here, the data term E
data
assesses the agreement
of the disparity solution with the input images by
computing a match measurement. In addition, the
smoothness term E
smooth
imposes a penalty on spa-
tially neighbouring pixels carrying different disparity
labels. This term is motivated by the fact that neigh-
bouring image points are highly correlated, i.e. they
are likely to have similar disparities. A natural choice
for a pixel’s neighbourhood is the four-connected
neighbourhood structure, so that a pixel’s disparity is
biased towards the disparities of its closest two hori-
zontal and two vertical neighbours. This neighbour-
hood system leads to the standard four-connectedgrid
shown in Figure 1a.
Optimization of (1) is known to be NP-complete
for discontinuity-preserving smoothness functions.
Modern stereo techniques commonly apply graph-
cuts (Boykov et al., 2001) or belief propagation (Sun
et al., 2003) to approximate such energies. Meth-
ods that build upon these minimization schemes cur-
rently represent the state-of-the-art in stereo match-
415
Bleyer M. and Gelautz M. (2008).
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 415-422
DOI: 10.5220/0001072904150422
Copyright
c
SciTePress
(a) (b)
p
(c) (d)
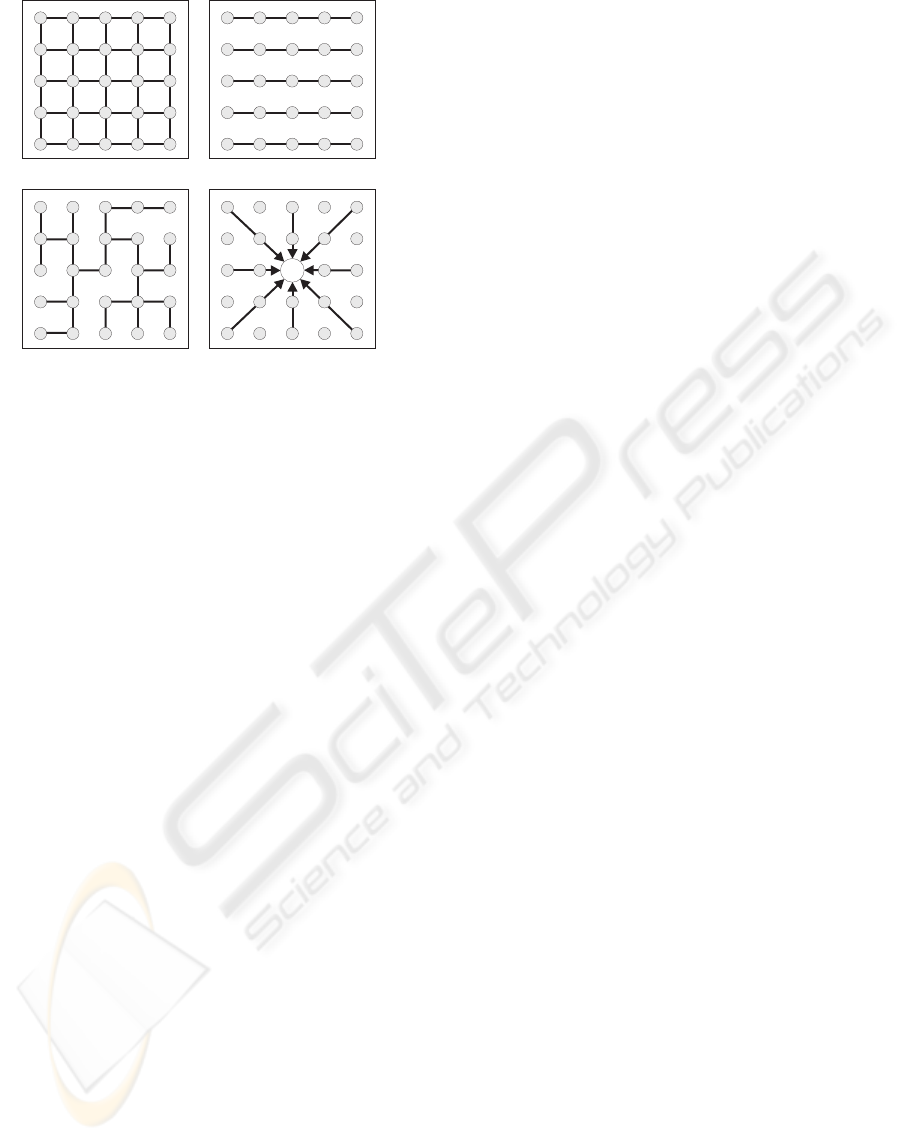
Figure 1: Grid structures of previous approaches. Nodes
represent pixels, while edges indicate that the smooth-
ness function operates on the adjacent nodes. (a) Four-
connected grid. (b) Scanline-based DP approaches. (c)
Tree-based DP proposed by (Veksler, 2005). (d) Approach
of (Hirschm¨uller, 2005) to derive the disparity of pixel p.
ing (Scharstein and Szeliski, 2002). However, a se-
vere limitation of these optimization algorithms is that
they are computationally rather expensive. Especially
for the graph-cut approach, calculation of a single dis-
parity map can still take several minutes.
To bypass the NP-complete optimization problem,
classical DP approaches (Bobick and Intille, 1999;
Ohta and Kanade, 1985; Wang et al., 2006) adopt
a greatly simplified neighbourhood structure in their
smoothness terms. They enforce smoothness only
within, but not across horizontal scanlines. The corre-
sponding grid graph is illustrated in Figure 1b. Since
there is no interconnection between horizontal scan-
lines, an energy minimum for this grid structure can
be derived by computing the optimum for each scan-
line separately. The exact optimum of (1) on each in-
dividual scanline is then determined using DP. Such
approaches are favourable for their excellent com-
putational speed. Skipping the vertical smoothness
edges, however, leads to the well-known scanline
streaking effect. This inherent problem represents a
major reason for the bad reconstruction quality of DP
in comparison to the state-of-the-art.
Recently, (Veksler, 2005) proposed approximat-
ing the four-connected grid via a tree. The motiva-
tion is that efficient DP-based optimization also works
on tree structures. Roughly spoken, the tree is con-
structed by discarding edges that show a high gradient
in the intensity image from the four-connected grid.
In contrast to scanline-based DP, horizontal and ver-
tical edges are treated symmetrically, which weakens
the streaking problem. Nevertheless, as can be seen
from Figure 1c, a large number of edges have to be
sacrificed in order to obtain a tree structure. The in-
formation of these edges remains unused, which is
most likely the reason for the only average results
of this method. Subsequent work (Deng and Lin,
2006; Lei et al., 2006) combines tree-based DP with
colour segmentation. These algorithms improve the
results on standard images such as the Middlebury
set (Scharstein and Szeliski, 2002). They, however,
fail if segments overlap disparity discontinuities.
A different approach to handle the streaking prob-
lem is to compute multiple DP passes. Two-pass
methods (Gong and Yang, 2005; Kim et al., 2005)
first apply DP on the horizontal scanlines and use the
results to bias the second pass, which operates on
the vertical scanlines. While horizontal streaks are
reduced, these algorithms introduce vertical streaks,
and their scanline-based nature is clearly visible in the
resulting disparity maps.
(Hirschm¨uller, 2005) proposed a hybrid approach
between local and global methods. The disparity
of each pixel is computed using the winner-takes-all
strategy, i.e. without considering the disparity assign-
ments of neighbouring pixels. Instead of aggregating
matching costs from spatially surrounding pixels, the
algorithm computes DP paths from various directions
towards each pixel p as shown in Figure 1d. Cost
aggregation is then performed by summing up the in-
dividual path costs. In Hirschm¨uller’s approach, the
disparity of an image point is influenced by only a
small subset of the whole image’s pixels. This repre-
sents a problem if none of the paths captures enough
texture to provide a clear cost minimum at the correct
disparity. To weaken this problem, Hirschm¨uller pro-
posed increasing the number of paths. Nevertheless,
this results in higher computational demands and only
partially represents a remedy to the problem. In a sub-
sequent paper (Hirschm¨uller, 2006), he addressed this
problem using image segmentation.
2 THE SIMPLE TREE METHOD
The algorithm proposed in this paper performs a sep-
arate disparity computation for each individual pixel.
We apply an individual tree construction in order to
determine the disparity of a single pixel. The tree’s
root node is formed by the pixel whose disparity
needs to be computed. Although our trees prove to be
effective, their structure is relatively simple. (Hence,
we call our algorithm the Simple Tree Method.) For
now, it is only important to know that a tree spans all
pixels of the reference frame. A global minimum of
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
416

an energy function that operates on the tree structure
is determined via DP. We then look up the disparity
that lies on this energy minimum in the root node. Fi-
nally, this disparity is assigned to the image point for
which we performed the disparity computation.
In comparison to (Hirschm¨uller, 2005), our algo-
rithm assigns disparities based on the exact solution
of a clearly defined optimization problem. This might
represent a more “meaningful” result than selecting
the minimum of summed-up path costs. More impor-
tantly, we use tree structures that incorporateall pixels
of the reference image. A pixel’s disparity is there-
fore influenced by all other pixels and not just by a
subset thereof. This is what (Veksler, 2005) refers to
as “truly global”. Practically spoken, our algorithm
does not show the problem of missing image features
that help to disambiguate a pixel’s disparity, which is
specifically important in less textured image regions.
In the context of (Veksler, 2005), the most distinct
difference is that we do not apply a single tree to com-
pute the disparities of all pixels at once, but design
more flexible trees that vary their grid structures with
the spatial position of the pixel under consideration.
Obviously, we also share the disadvantage of losing
a large number of edges by approximating the four-
connected grid via a tree. However, as will be shown
in this section, we address this problem by using two
complementary tree structures, each of which incor-
porating a complementary set of edges.
The remainder of this section is organized as fol-
lows. We start by defining our energy function (sec-
tion 2.1). We then present the tree structures applied
in our approach (section 2.2). DP on a tree is reviewed
in section 2.3. Efficient optimization of the energy
function on our tree structures is discussed in section
2.4. Section 2.5 shows how our algorithm combines
two different types of trees. Finally, occlusion han-
dling is addressed in section 2.6.
2.1 Energy Function
Let I be the set of all pixels in the reference frame
and D denote the set of allowed disparity labels. We
formulate the stereo matching task as finding a dis-
parity solution D that maps each pixel p ∈ I to a dis-
parity d
p
∈ D . The goodness of a disparity map D is
evaluated by an energy functional, which is subject to
minimization. We define the energy function by
E(D) =
∑
p∈I
m(p, d
p
) +
∑
(p,q)∈N
s(d
p
, d
q
). (2)
Here, the data term m(p, d
p
) computes the pixel dis-
similarity of p being assigned to d
p
. We implement
this function using the sampling-insensitive measure-
p p
(a) (b)
Figure 2: Tree-based approximations of the four-connected
grid applied in this approach. Two trees are constructed for
each pixel p of the reference frame. (a) Horizontal Tree. (b)
Vertical Tree.
ment of (Birchfield and Tomasi, 1998) on RGB val-
ues. The smoothness function applied on two pixels
p and q that are neighbours according to a predefined
set N is defined by
s(d
p
, d
q
) =
0 : d
p
= d
q
P
1
: |d
p
− d
q
| = 1
P
2
: otherwise.
(3)
We impose a user-defined penalty P
1
for small jumps
in disparity that do not exceed a value of one pixel.
Such jumps commonly occur for slanted surfaces and
are typically overpenalized when using the standard
Potts model. A second penalty P
2
with P
2
> P
1
ac-
counts for penalizing large jumps in disparity that oc-
cur at disparity borders. In order to align disparity dis-
continuities with discontinuities in the intensity im-
age, we compute the value of P
2
by
P
2
=
P
3
· P
′
2
: |I
p
− I
q
| < T
P
′
2
: otherwise
(4)
with |I
p
− I
q
| being the summed-up absolute differ-
ences of RGB channels. P
′
2
, P
3
and T denote prede-
fined constants.
2.2 Simple Tree Structures
Choosing the set of neighbours N in equation (2)
defines the complexity of the resulting optimization
problem. In the ideal case, N is formed by all pairs of
spatially neighbouring pixels of the reference image.
Since it is known that optimization of the resulting
four-connected grid (Figure 1a) is difficult and com-
putationally challenging, we propose finding approx-
imations of this grid in each individual image point.
Our approximationsare based on trees, i.e. graphs that
do not contain cycles. If N consists of pixel pairs that
form a tree on the grid graph, exact minimization of
our energy can efficiently be accomplished via DP.
Our first approximation is shown in Figure 2a.
The tree is rooted on pixel p whose disparity is com-
puted. It includes all horizontal smoothness edges
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING
417

of the four-connected grid. In addition, the edges
from the vertical scanline on which p is located en-
force smoothness in vertical direction. Since horizon-
tal edges dominate in this tree structure, we refer to
this tree as the Horizontal Tree.
The second approximation illustrated in Figure
2b can be regarded as the complementary tree struc-
ture to the Horizontal Tree. The idea is to include
those edges that have been discarded from the four-
connected grid in order to derive the Horizontal Tree.
The tree is formed by all vertical edges as well as the
edges of the horizontal scanline on which p resides.
We call this tree the Vertical Tree.
To determine p’s disparity, we optimize our en-
ergy function with the set N being built by all edges
of the tree rooted on p. The disparity d
p
is then de-
rived by selecting the disparity that lies on the com-
puted optimum. Our algorithm thereby combines the
results of Horizontal and Vertical Trees. Section 2.5
shows how this is accomplished.
2.3 DP on a Tree
We can determine an exact optimum of energy (2) on
a tree via DP. This works as follows. Let r be the
root node of a tree. A minimum value of energy for
r at disparity d is computed by passing r and d as
arguments to a recursive function l() defined by
l(p, d) = m(p, d) +
∑
q∈v(p)
min
i∈D
(s(d,i) + l(q, i)). (5)
Here, the function v(p) returns the siblings of p, i.e.
the nodes that have p as their direct predecessor on
the path to the root r. Since, by definition, leaf nodes
do not have siblings, the function l() can be directly
evaluated for these nodes. For a non-leaf node, l()
is evaluated when the values of l() have been com-
puted for all its siblings. The algorithm terminates
once it reaches the root r. A global energy minimum
is computed by min
d∈D
l(r, d), and r’s disparity is de-
termined by argmin
d∈D
l(r, d).
(Veksler, 2005) has shown that for her energy
function the complexity of this algorithm can be re-
duced to O(|D |wh) with w and h being the image
width and height. However, if we apply the algorithm
on a large number of trees, this can easily become
computationally intractable.
2.4 DP on Simple Trees
In our approach, we benefit from the simple struc-
ture of our trees to significantly improve the compu-
tational speed. We show how the optima of all Hori-
zontal Trees are determined with four scanline-based
p
wy,
p
x y,
p
1,y
r
(a)
p
wy,
p
1,y
r
p
x y,
(b)
p
wy,
p
1,y
r
p
x y,
(c)
Figure 3: Computation of optimal costs on a scanline. Ar-
rows determine the order in which path costs are computed.
In the tree DP algorithm, r denotes the position of the root
node. (a) Forward pass. (b) Backward pass. (c) Optimal
costs for pixel p
x,y
are derived by combining costs of for-
ward and backward passes.
DP passes. An analogous construction can be applied
for Vertical Trees.
In the first step, we optimize horizontal scanlines
separately from each other. The goal is to compute
the values of an array C with C[p, d] representing the
costs of an optimal disparity solution in which pixel p
is assigned to disparity d. In this context, an optimal
disparity solution is one that minimizes the energy on
individual scanlines. In the following, the values of C
are determined with two DP passes as shown in Figure
3. C is needed for further processing.
The first DP pass, which is referred to as forward
pass, is similar to that of standard DP methods. We
compute the optimal costs for reaching each pixel’s
disparity from the leftmost pixel of a scanline. These
costs are calculated using the following recursion,
which represents a simplified form of equation (5):
l
′
(p, d) = m(p, d) + min
i∈D
s(d, i) + l
′
(q, i)
. (6)
Here, q denotes the sibling of p. For the forward pass,
this is the pixel to the left of p. In contrast to stan-
dard DP methods, l() does not enforce the ordering
constraint. This approach is therefore closer related
to Scanline Optimization (Scharstein and Szeliski,
2002). The accumulated costs l
′
(p, d) for each pixel
p and disparity d are recorded in an array F.
As a second DP pass, the backward pass deter-
mines the costs to reach each pixel’s disparity from
the rightmost pixel of a scanline. These costs are com-
puted using the function l
′
(p, d) with p’s sibling q be-
ing defined as the pixel to the right of p. An array B
stores the accumulated costs of the backward pass.
The optimal costs for each pixel’s disparity can be
computed from the accumulated costs of forward and
backward passes (Kim et al., 2005). Let p
x,y
denote
the pixel at coordinates (x, y). The energy minimum
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
418
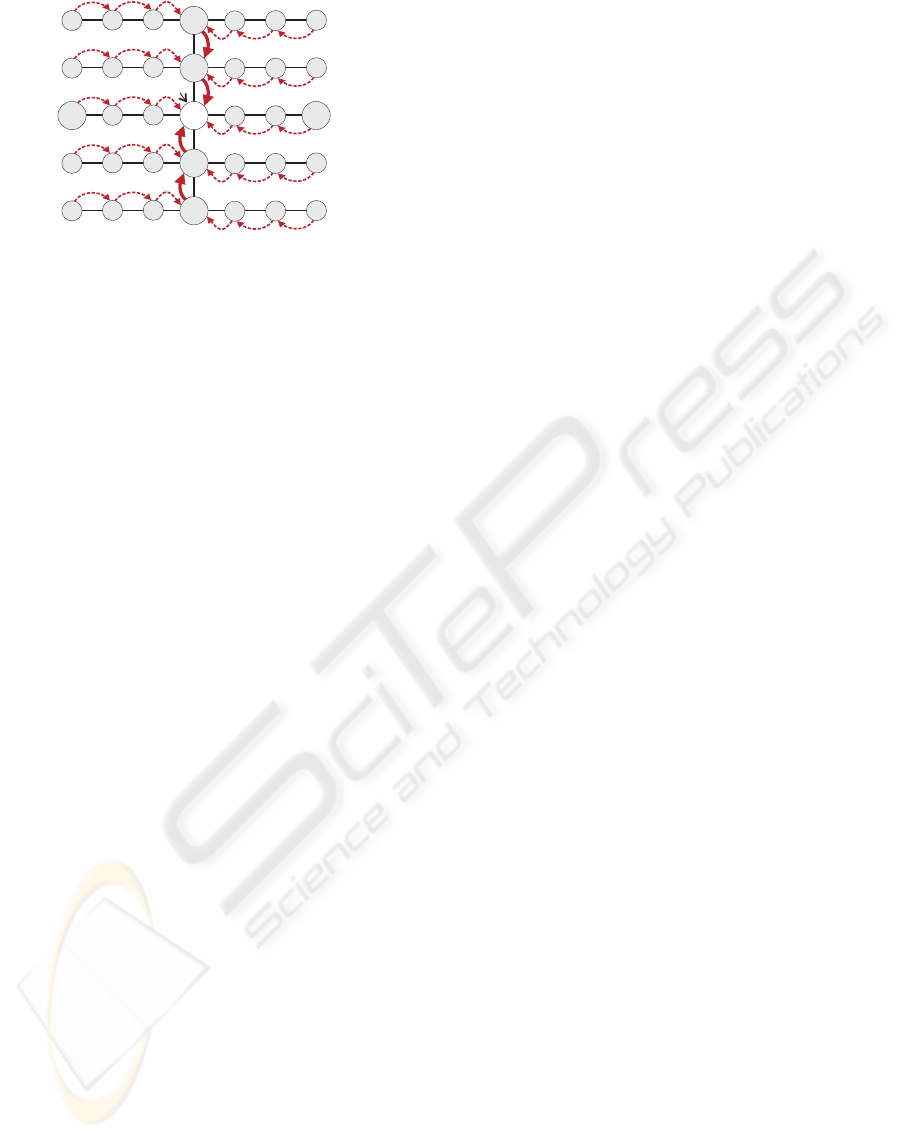
p
x,y
p
wy,
p
1,y
p
x,1
p
x h,
r
Figure 4: Computation of optimal costs on the Horizontal
Tree rooted on pixel p
x,y
. DP only needs to be performed
for solid arrows. Optimal values are determined by DP on
the vertical scanline using precomputed path costs.
of p
x,y
at disparity d is derived by expanding the sum
in equation (5) at pixel p
x,y
, i.e.
C(p
x,y
, d) = m(p
x,y
, d) + min
i∈D
(s(d, i) + F[p
x−1,y
, i])
+ min
i∈D
(s(d, i) + B[p
x+1,y
, i]).
(7)
This is equivalent to
C(p
x,y
, d) = F[p
x,y
, d] + B[p
x,y
, d] − m(p
x,y
, d). (8)
It is noteworthy that min
d∈D
C[p, d] is constant for all
pixels p of the same scanline. This makes sense, since
this value represents the global optimum of our en-
ergy function on the scanline. Given that this opti-
mum is unique, we can reconstruct the optimal dispar-
ity assignment by computing d
p
= argmin
d∈D
C[p, d].
In the following, we calculate the energy minima
for all Horizontal Trees. The basic idea is sketched in
Figure 4. We compute the values of an array H with
H[p, d] being the energy optimum for the Horizontal
Tree rooted on pixel p at disparity d. This value is
derived by passing p and d as parameters to a function
l
′′
(). Considering the special structure of the tree, we
define l
′′
() by expanding the sum in equation (5):
l
′′
(p
x,y
, d) = m(p
x,y
, d) + min
i∈D
(s(d, i) + F[p
x−1,y
, i])
+ min
i∈D
(s(d, i) + B[p
x+1,y
, i])
+
∑
q∈v
′
(p
x,y
)
min
i∈D
s(d, i) + l
′′
(q, i)
.
(9)
Here, the function v
′
(p) returns the siblings that are
connected to their predecessor via a vertical edge. We
use the precomputed values of array C to write
l
′′
(p
x,y
, d) = C[p
x,y
, d]
+
∑
q∈v
′
(p
x,y
)
min
i∈D
s(d, i) + l
′′
(q, i)
.
(10)
In the computation of H[p, d] for each pixel p and
disparity d, we take advantage of the fact that l
′′
()
solely operates on pixels of the same vertical scan-
line. When interpreting the values of C as the match-
ing costs m() of a DP path, this calculation is, in
fact, equivalent to scanline-based DP along the ver-
tical scanlines. Hence, we can use the same strategy
as before. That is, we compute forward and backward
passes on the precomputed values of C in vertical di-
rection. Finally, the forward and backward passes are
combined to determine the energy minima in H.
Computation of the array V representing the op-
tima for the Vertical Tree structure is accomplished
equivalently, except that we first optimize vertical
scanlines and then operate on the horizontal ones.
Regarding the computational performance, the
most expensive part of our algorithm is the calcu-
lation of scanline-based DP passes. In a naive im-
plementation, evaluation of l
′
(p, d) in equation (6)
for each pixel p and disparity d takes a complex-
ity of O(|D |
2
wh). This is an undesirable prop-
erty when designing a fast algorithm. Analogously
to (Hirschm¨uller, 2005), we reformulate l
′
() for our
energy function as
l
′
(p, d) =m(p, d) + min(l
′
(q, d), l
′
(q, d − 1) + P
1
,
l
′
(q, d + 1) + P
1
, min
i∈D
l
′
(q, i) + P
2
).
(11)
Let us compute the values of l
′
(p, d) at a specific
pixel p for each disparity d ∈ D using this formula-
tion. The value of min
i∈D
l
′
(q, i) can be precomputed,
so that the complexity of this operation is linear in the
number of disparity labels. Consequently, the overall
complexity of a DP pass is reduced to O(|D |wh).
2.5 Combining the Tree Structures
To combine Horizontal and Vertical Trees in our algo-
rithm, we propose the following strategy. We start by
operating on the Vertical Tree structure and determine
the array V as described in section 2.4. V serves to
propagate the results of the Vertical Tree computation
to the subsequent calculation of Horizontal Trees. We
therefore manipulate the data costs m(). The updated
matching scores m
′
() are derived by
m
′
(p, d) = m(p, d) + λ · (V(p, d) − min
i∈D
V(p, i))
(12)
with λ being a parameter that regulates the influence
of the Vertical Trees on the final disparity map. Our
update proceduremeasures the difference between the
costs of the solution in which a pixel p is assigned to
disparity d and the costs of p’s optimal disparity as-
signment. If d does not represent an optimal disparity
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING
419

for p, we impose a penalty on d. The amount of this
penalty is proportional to the computed difference. If
the difference is large, it is likely that d is the wrong
disparity for pixel p. This information is passed to the
subsequent calculation by imposing a large penalty.
However, if there are pixels whose costs are not much
higher than those of the optimal disparity or the opti-
mal disparity is not unique, estimation of p’s dispar-
ity is still ambiguous. Such disparities receive only a
small penalty, and it is left to the subsequent compu-
tation of Horizontal Trees to resolve this ambiguity.
The updated matching scores then represent the
input to the calculation of Horizontal Trees. We de-
termine the values of the array H using the modified
data costs m
′
(). The final disparity for each pixel p is
then selected by d
p
= argmin
d∈D
H[p, d].
2.6 Occlusion Handling
An inherent problem in stereo matching is that of oc-
cluded pixels, i.e. pixels visible in one input image,
but not in the other one. We cannot expect that our
algorithm generates correct depth information in the
absence of a matching point. Even worse, the smooth-
ness term of our energy function corrupts disparity es-
timates for non-occludedpixels by propagatingwrong
disparity information gathered in occluded regions.
To handle occlusions, we compute two disparity
maps. The first disparity map D
R
is calculated with
the right frame being the reference image. D
R
serves
solely to identify the occluded pixels of the left image.
We use D
R
to warp the right image into the geometry
of the left view. Pixels of the warped image that do
not receive contribution from at least one pixel of the
right image are marked as being occluded (Bleyer and
Gelautz, 2005). These pixels are recorded in an occlu-
sion map for the left image denoted by O
L
. We post-
process O
L
by deleting occluded pixels whose left and
right spatial neighbours are marked as non-occluded.
Such pixels typically occur for slanted surfaces that
are oversampled in the left image (Ogale and Aloi-
monos, 2004). These pixels are not occluded, but vi-
olate the uniqueness constraint.
The second disparity map D
L
is computed with the
left image being the reference frame. At this point, we
do not attempt to assign occluded pixels of O
L
to “cor-
rect” disparities. We, however, attempt to avoid that
occluded pixels of O
L
propagate wrong disparities.
We therefore extend the smoothness term of equation
(3) by an additional constraint. This constraint is: If
at least one of the two neighbouring pixels is marked
as occluded in O
L
, the smoothness penalty is set to
zero. As a consequence, an occluded pixel does not
influence the disparity assignments of its neighbour-
ing pixels by imposing the smoothness penalty.
The final disparity map of our algorithm is de-
rived from D
L
by overwriting the estimated disparities
for occluded pixels with more “meaningful” disparity
values. For each occluded pixel p in the occlusion
map O
L
, we search p’s closest non-occluded pixels
on the same horizontal scanline in left and right di-
rections. We determine the minimum of both pixels’
disparities and assign this disparity to p.
3 EXPERIMENTAL RESULTS
We use the Middlebury data set (Scharstein and
Szeliski, 2002) to evaluate the results of our algo-
rithm. The test set consists of four stereo pairs for
which ground truth data is provided. Results of our
algorithm on these stereo images are shown in Fig-
ure 5. All disparity maps have been generated using
constant parameter settings. (The parameters are set
to P
1
= 20, P
′
2
= 30, P
3
= 4, T = 30 and λ = 0.025.)
Obviously, we could improve the results by tuning the
parameters for each image pair separately.
The disparity maps in Figure 5 show that our al-
gorithm produces smooth disparity results. Due to
the occlusion handling procedure and the algorithm’s
pixel-based nature, disparity discontinuities appear to
be correctly captured. The algorithm also preserves
details in the disparity map (e.g., sticks in the cup
of the Cones data set). As opposed to other DP ap-
proaches, our disparity maps seem to be almost free of
streaks. This can be attributed to the structure of our
trees that captures horizontal and vertical smoothness
edges. Our disparity maps also hardly contain iso-
lated pixels. These are typical artefacts produced by
the Semi-Global Approach of (Hirschm¨uller, 2005)
when the DP paths do not capture enough texture.
Our approach avoids this problem by applying trees
that span all pixels of the reference image. A rela-
tively large error is, however, found to the right of the
pink teddy in the Teddy data set. This region is virtu-
ally free of texture and image noise biases the results
towards the wrong disparity.
We use the Middlebury stereo website (Scharstein
and Szeliski, 2002) for a quantitative comparison
against competing approaches. Currently, our algo-
rithm ranks on the eighth position of approximately
30 algorithms in the Middlebury online table. Most
methods that achieve a better ranking build on graph-
cuts or belief propagation. They are far slower than
the proposed algorithm, which makes a compari-
son partially unfair. Moreover, all of the better-
performing techniques apply colour segmentation and
most of them use the segmentation information as a
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
420

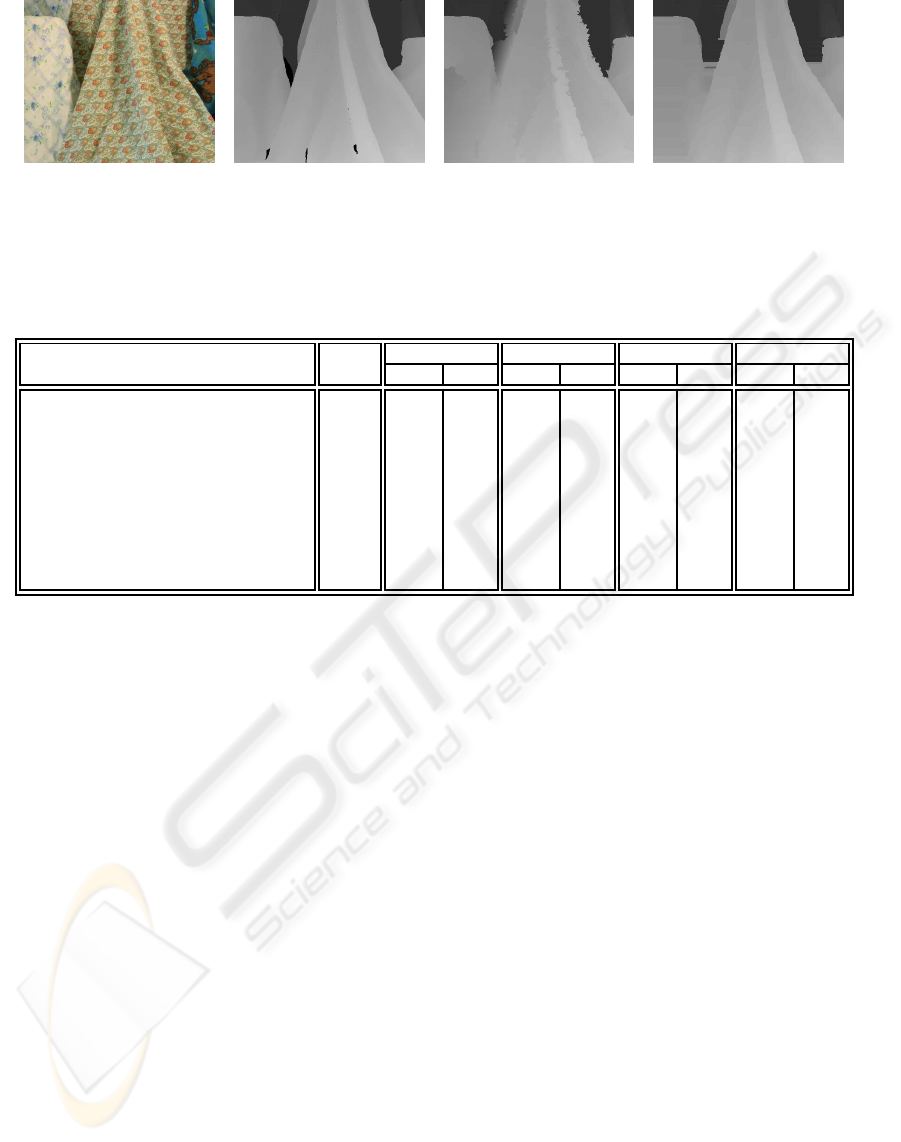
Figure 5: Results of our algorithm on the Tsukuba, Venus, Teddy and Cones image pairs from the Middlebury data set. The
upper row shows the ground truth images. The bottom row shows the disparity maps computed by the Simple Tree Method.
hard constraint. While segmentation works well on
the Middlebury data set, these algorithms fail in situa-
tions such as shown in Figure 6. Applying colour seg-
mentation on the reference image (Figure 6a) leads to
segments that overlap disparity discontinuities. Due
to these overlapping regions, the segmentation-based
algorithm of (Bleyer and Gelautz, 2005), which is
one of the top-performersin the Middlebury database,
generates erroneous disparity estimates in the proxim-
ity of disparity borders (Figure 6c). In contrast to this,
the proposed algorithm can correctly capture the dis-
parity discontinuities as the consequence of its pixel-
based nature (Figure 6d).
Table 1 gives a quantitative comparison of our
algorithm against other DP approaches. These re-
sults are obtained from the Middlebury website. Two
methods that apply colour segmentation show slightly
better results. Apart from the above described prob-
lem, it should be noted that performing image seg-
mentation (commonly accomplished using the mean-
shift algorithm) is also a computationally costly oper-
ation, which can spoil the speed advantage of DP op-
timization. (Lei et al., 2006) report running times be-
tween 10 and 25 seconds on the Middlebury data set
with most of the time being consumed by the segmen-
tation overhead. (Hirschm¨uller, 2006) states that seg-
mentation increases the running time of this approach
by 30–50 percent, which makes it likely that also this
method is slower than the proposed approach. It can
be seen from the table that our technique shows better
quantitative results than the Semi-Global Approach
of (Hirschm¨uller, 2005) and significantly outperforms
the tree DP method of (Veksler, 2005).
We have run our method on a machine equipped
with two dual-core AMD Opteron processors clocked
at 2.4 GHz. To take advantage of this multi-core
architecture, we have parallelized the optimization
component of our algorithm. We therefore divide the
image into even sets of scanlines. The scanline sets
are then distributed among the CPUs for perform-
ing DP. Overall running times of our implementation
range from 0.18 seconds on the Tsukuba stereo pair
(384×288 pixels, 16 disparity labels) to 0.57 seconds
on the Teddy and Cones sets (450×375 pixels, 60 dis-
parity labels). It is realistic to expect real-time perfor-
mance as the result of further parallelization, which
can, for example, be implemented on the GPU.
4 CONCLUSIONS
The idea of this paper has been to generate a dense
disparity map by solving an individual optimization
problem for each image point. We approximate the
standard four-connected grid in each pixel of the ref-
erence frame. Our approximations build on two com-
plementary tree structures, i.e. the Horizontal Tree
and the Vertical Tree. We have shown that by ex-
ploiting the simple structure of these trees we can effi-
ciently compute the exact solutions of all optimization
tasks with only few scanline-based DP passes.
Our algorithm produces disparity maps that are
almost free of the streaking problem inherent to DP
approaches. Currently, the method is the overall
best-performing algorithm in the Middlebury online
database that does not apply segmentation. Our algo-
rithm is faster than most competing methods, which
typically rely on graph-cuts or belief propagation. We
therefore see our algorithm as an alternative method
when speed matters. It takes less than a second to
compute the disparity map for typical image pairs.
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING
421
(a) (b) (c) (d)
Figure 6: Limitations of segmentation-based methods. (a) Reference view. (b) Ground truth. (c) Result of the segmentation-
based algorithm in (Bleyer and Gelautz, 2005). (Percentage of pixels having an absolute disparity error > 1 in non-occluded
regions = 4.08.) (d) Result of the proposed method. (Error percentage = 1.80.) More information is given in the text.
Table 1: Rankings of DP approaches in the Middlebury database. Values represent error percentages measured in different
image regions. Our algorithm (SimpleTree) is currently the overall best-performing method that does not use segmentation.
Algorithm Rank
Tsukuba Venus Teddy Cones
nocc all nocc all nocc all nocc all
C-SemiGlob (Hirschm¨uller, 2006) 5 2.61 3.29 0.25 0.57 5.14 11.8 2.77 8.35
RegionTreeDP (Lei et al., 2006) 6 1.39 1.64 0.22 0.57 7.42 11.9 6.31 11.9
SimpleTree 8 1.86 2.56 0.42 0.76 7.31 12.7 4.00 9.74
SegTreeDP (Deng and Lin, 2006) 10 2.21 2.76 0.46 0.60 9.58 15.2 3.23 7.86
SemiGlob (Hirschm¨uller, 2005) 12 3.26 3.96 1.00 1.57 6.02 12.2 3.06 9.75
RealTimeGPU (Wang et al., 2006) 19 2.05 4.22 1.92 2.98 7.23 14.4 6.41 13.7
ReliabilityDP (Gong and Yang, 2005) 21 1.36 3.39 2.35 3.48 9.82 16.9 12.9 19.9
TreeDP (Veksler, 2005) 22 1.99 2.84 1.41 2.10 15.9 23.9 10.0 18.3
DP (Scharstein and Szeliski, 2002) 24 4.12 5.04 10.1 11.0 14.0 21.6 10.5 19.1
SO (Scharstein and Szeliski, 2002) 27 5.08 7.22 9.44 10.9 19.9 28.2 13.0 22.8
ACKNOWLEDGEMENTS
This work has been supported by the Austrian Science
Fund (FWF) under project P19797.
REFERENCES
Birchfield, S. and Tomasi, C. (1998). A pixel dissimilarity
measure that is insensitive to image sampling. TPAMI,
20(4):401–406.
Bleyer, M. and Gelautz, M. (2005). A layered stereo match-
ing algorithm using image segmentation and global
visibility constraints. ISPRS Journal, 59(3):128–150.
Bobick, A. and Intille, S. (1999). Large occlusion stereo.
IJCV, 33(3):181–200.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast approx-
imate energy minimization via graph cuts. TPAMI,
23(11):1222–1239.
Deng, Y. and Lin, X. (2006). A fast line segment based
dense stereo algorithm using tree dynamic program-
ming. In ECCV, volume 3, pages 201–212.
Gong, M. and Yang, Y. (2005). Near real-time reliable
stereo matching using programmable graphics hard-
ware. In CVPR, pages 924–931.
Hirschm¨uller, H. (2005). Accurate and efficient stereo pro-
cessing by semi-global matching and mutual informa-
tion. In CVPR, volume 2, pages 807–814.
Hirschm¨uller, H. (2006). Stereo vision in structured en-
vironments by consistent semi-global matching. In
CVPR, volume 2, pages 2386–2393.
Kim, J., Lee, K., Choi, B., and Lee, S. (2005). A dense
stereo matching using two-pass dynamic program-
ming with generalized ground control points. In
CVPR, volume 2, pages 1075–1082.
Lei, C., Selzer, J., and Yang, Y. (2006). Region-tree based
stereo using dynamic programming optimization. In
CVPR, volume 2, pages 2378–2385.
Ogale, A. S. and Aloimonos, Y. (2004). Stereo correspon-
dence with slanted surfaces: critical implications of
horizontal slant. In CVPR, pages 568–573.
Ohta, Y. and Kanade, T. (1985). Stereo by intra- and inter-
scanline search. TPAMI, 7(2):139–154.
Scharstein, D. and Szeliski, R. (2002). A taxon-
omy and evaluation of dense two-frame stereo cor-
respondence algorithms. IJCV, 47(1/2/3):7–42.
http://www.middlebury.edu/stereo/.
Sun, J., Zheng, N., and Shum, H. (2003). Stereo matching
using belief propagation. TPAMI, 25(7):787–800.
Veksler, O. (2005). Stereo correspondence by dynamic pro-
gramming on a tree. In CVPR, pages 384–390.
Wang, L., Liao, M., Gong, M., Yang, R., and Nister, D.
(2006). High quality real-time stereo using adap-
tive cost aggregation and dynamic programming. In
3DPVT.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
422
