
AUTOMATIC INITIALIZATION FOR BODY TRACKING
Using Appearance to Learn a Model for Tracking Human Upper Body Motions
Joachim Schmidt
Bielefeld University, Technical Faculty, Applied Computer Science
P. O. Box 100131, D-33501 Bielefeld, Germany
Modesto Castrill
´
on-Santana
Institute of Intelligent Systems and Numerical Applications in Engineering
Edificio Central del Parque Tecnol
´
ogico, Campus de Tafira, University of Las Palmas de Gran Canaria - Spain
Keywords:
Human robot interaction, face detection, model acquisition, automatic initialization, human body tracking.
Abstract:
Social robots require the ability to communicate and recognize the intention of a human interaction partner.
Humans commonly make use of gestures for interactive purposes. For a social robot, recognition of gestures
is therefore a necessary skill. As a common intermediate step, the pose of an individual is tracked over
time making use of a body model. The acquisition of a suitable body model, i.e. self-starting the tracker,
however, is a complex and challenging task. This paper presents an approach to facilitate the acquisition
of the body model during interaction. Taking advantage of a robust face detection algorithm provides the
opportunity for automatic and markerless acquisition of a 3D body model using a monocular color camera.
For the given human robot interaction scenario, a prototype has been developed for a single user configuration.
It provides automatic initialization and failure recovery of a 3D body tracker based on head and hand detection
information, delivering promising results.
1 INTRODUCTION
As stated by McNeill gestures play an important role
in human communication (McNeill, 1992). Accord-
ing to this, a social robot requires the abilities to lo-
calize, track and interpret human behavior during an
interaction session. Pursuing this challenge is an ac-
tive field in Computer Vision research, due to the re-
strictions imposed by approaches developed so far for
this purpose.
A simple 3D body model based on joints and
their motion is sufficient for humans to perform ac-
tion recognition (Johansson, 1973). 3D body acquisi-
tion and tracking provides the data source necessary
to accomplish such a task, offering a great domain of
applications: Surveillance, Activity Recognition, Hu-
man Computer/Robot Interaction, Mobile Robotics,
etc.
The task of tracking a human body in monocu-
lar images is commonly carried out by fitting artic-
ulated kinematic models representing the appearance
of a person to mono- or multiocular images (Siden-
bladh et al., 2000; Sigal et al., 2004; Sminchisescu
and Triggs, 2005). The surveys of Gavrila (Gavrila,
1999), and Moeslund and Granum (Moeslund and
Granum, 2001) provide a good overview of the topic
of model based 3D body tracking. In addition to a
kinematic body model describing the appearance of
the body, bringing in prior knowledge about familiar
body configurations (Brox et al., 2006) can help to
constrain the search process, preventing the produc-
tion of unrealistic pose estimates. Difficulties in rec-
ognizing ambiguous poses, as is common in monoc-
ular tracking, can be overcome when 3D information
is available, e.g., acquired from time-of-flight sensors
or stereo camera systems, as shown by (S. Knoop,
2006). For most of the above approaches, however,
the question of initialization stays open or is sub-
ject to manual or semi-automatic procedures. Us-
ing body tracking in human robot interaction often
comes with strong restrictions, e.g., the number and
type of cameras available or the gesture repertoire to
be observed. Tracking systems incorporating auto-
matic or semi-automatic initialization often make use
of learned appearance models (Ramanan and Forsyth,
2003), rely on stereotyped poses (Urtasun et al., 2005)
or on combining a repertoire of learned pose estimates
and visual appearance (Sigal and Black, 2006a; Tay-
535
Schmidt J. and Castrillón-Santana M. (2008).
AUTOMATIC INITIALIZATION FOR BODY TRACKING - Using Appearance to Learn a Model for Tracking Human Upper Body Motions.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 535-542
DOI: 10.5220/0001071005350542
Copyright
c
SciTePress
cher et al., 2006; Bissacco et al., 2007). Initialization
can also be formulated as the problem of pose esti-
mation or object reconstruction from a single image
using strong models (Lee and Cohen, 2004).
Summarizing, recent literature has described dif-
ferent approaches focused on tracking people. How-
ever, there is still a gap between tracking algorithms
and systems working in the real world, mainly due to
the fact that for most tracking approaches the chal-
lenges of automatic initialization and error recovery
are not addressed. In this paper, we present a system
within a typical human robot interaction scenario, i.e.,
where an individual is communicating with an artifi-
cial actor. The basic idea guiding the design of our
system is to integrate robust face and hand detection
results into a model representation that can be used
for automatic initialization and failure recovery of a
pose tracking algorithm.
Section 2 gives an overview about the functional-
ity of the approach describing the system modules in
detail. The experimental results and conclusions are
presented respectively in Sections 3 and 4.
2 SYSTEM
2.1 Overview
In this section we present our approach of a self-
starting 3D body model tracker in a human robot in-
teraction scenario.
There are a number of features that should be con-
sidered in order to make a system flexible enough
to operate within this context: 1) The person and its
body dimensions must not necessarily be known a pri-
ori, but the distance of the human to the robot has to
be adequate for interaction. 2) Images are acquired
using a single monocular color camera as the system
is intended to be used on a mobile robot without em-
ploying further sensors. 3) During system design, we
also avoided specific background models to allow the
tracking to be independent from the appearance of the
observed scene. To further allow a moving camera,
image background substraction based techniques like
motion history images are avoided as well.
For the proposed initialization procedure, some
restrictions, well suited for human robot interaction,
can be derived from the given scenario: 1) The per-
son is trying to communicate, therefore his intention
is to cooperate with the system. 2) The upper body,
including the head, torso and both hands, is visible
and no large self occlusion occurs. 3) The person is
standing in an upright position, facing the camera and
having the arms outstretched.
Algorithm 1: Algorithmic processing overview.
estimate initial pose from single image:
if face is detected then
extract skin and shirt samples
update color models for skin and shirt
create segmented images
detect hands using skin and shirt color segmentation
generate initial density estimating the correct pose:
if hands are detected then
find probable model poses based on the distances of the
hands and the face, use 5 DOF for model
else
body model facing the camera, arms hanging down, use
3 DOF for model
track human body:
wait until initial density is provided
if tracking for the first time then
start tracking: use density as prior
else
keep tracking:
if initial density is provided then
use density as recovery component,
use updated skin and shirt color models for tracking
else
track relying on current model
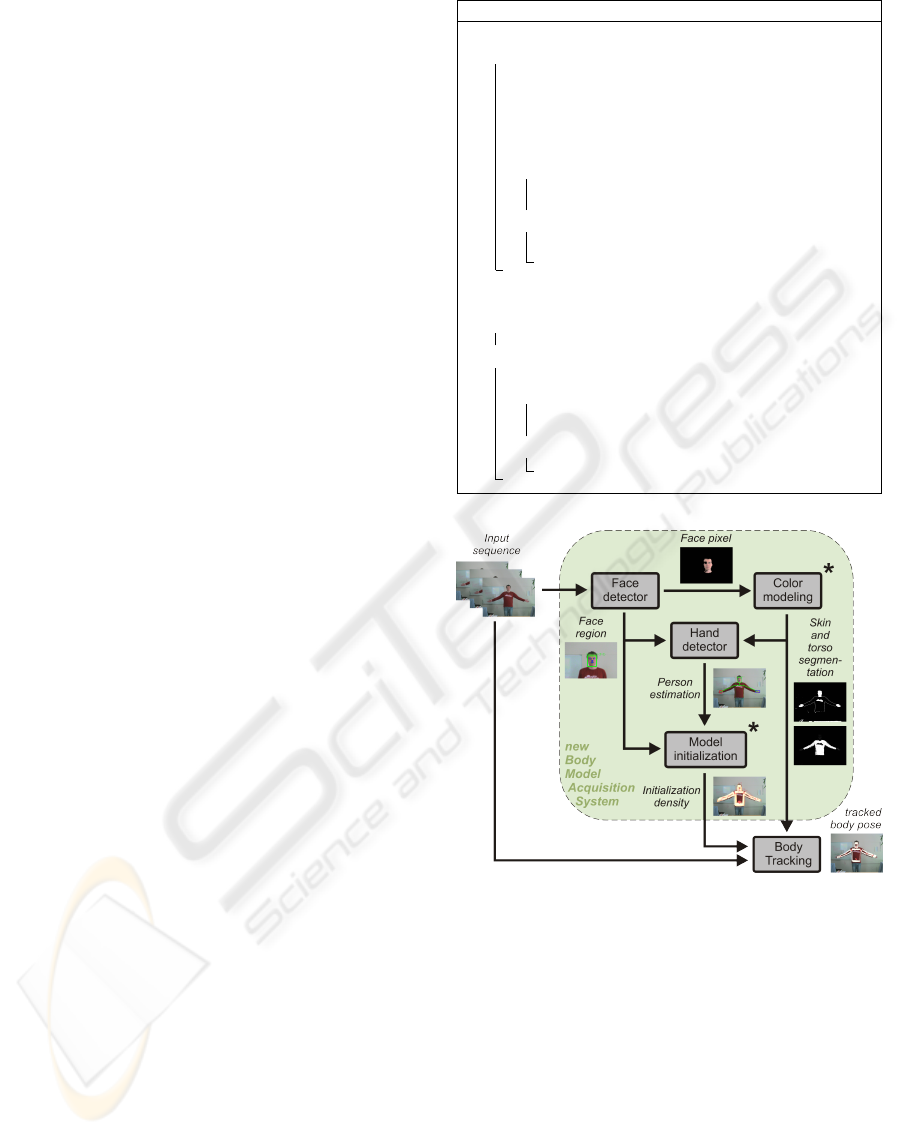
Figure 1: System overview. Faces are detected, shirt and
skin color are learned, hand and face positions are used to
estimate a density for initializing the tracking and for er-
ror recovery. Modules denoted by *. have been used in
the existing body model tracking framework, but had to be
manually initialized.
Succinctly the process, depicted in Figure 1 and
briefly outlined in Algorithm 1, applies first face de-
tection. A face has to be detected for estimating an
initial pose density and, starting the tracking. Its color
is modeled and based on this, both hands are located.
Face and hands information, if detected, are utilized
to estimate the likelihood for an initial body model
location. Once initialized, the body tracker performs
continuously considering face and hands information
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
536

whenever available. Future face and hand features al-
low the tracking system to have an additional valida-
tion control useful to recover the tracking from fail-
ures.
The different system modules are described in the
following subsections.
2.2 Face and Facial Element Detection
Several approaches have recently appeared present-
ing reliable face detection in real time (Schneiderman
and Kanade, 2000; Viola and Jones, 2004), making
face detection less environment-dependent. However,
cue combination can provide greater robustness and
higher processing speed, particularly for live video
stream processing (Castrill
´
on Santana et al., 2007),
outperforming single cue based detectors such as (Vi-
ola and Jones, 2004).
The face detection system (Castrill
´
on Santana
et al., 2007), integrates among other cues, differ-
ent classifiers based on the general object detection
framework by Viola and Jones (Viola and Jones,
2004), skin color, multilevel tracking, etc. The chosen
detection system provides not only face detection but
also facial feature location information in many situa-
tions. Extending a face detector with inner feature de-
tection (eyes, nose and mouth) also reduces the num-
ber of false alarms. As more restrictions are imposed,
it is less likely that all the detectors are activated si-
multaneously with false alarms, thereby minimizing
the influence of such errors.
Figure 2: Normalized face sample and likely locations for
nose and mouth positions after normalization.
Positive samples were obtained by annotating
manually the eye, nose and the mouth location in
7000 facial images taken randomly from the inter-
net. The images were later normalized by means of
eyes information to 59 ×65 pixels, see Figure 2(left).
Five different detectors were computed: (1,2) Left
and right eye (18 × 12 pixels), (3) eye pair (22 × 5),
(4) nose, and (5) mouth (22 × 15).
The facial element detection procedure is only ap-
plied in those areas which bear evidence of containing
a face. This is true for regions in the current frame,
where a face has been detected, or in areas with de-
tected faces in the previous frame. For video stream
processing, given the estimated area for each feature,
candidates are searched in those areas not only by
means of Viola-Jones’ based detectors, but also by
sum-of-squared differences (SSD) tracking previous
facial elements. Once all the candidates have been
obtained, the combination with the highest probabil-
ity is selected and a likelihood based on the normal-
ized positions for nose and mouth is computed for this
combination, see Figure 2.
2.3 Color Modeling
To add further details to the representation of the indi-
vidual detected, our system learns models of the skin
and the shirt color taking into account the previously
detected face region. This is done only for a robustly
detected face, for which at least three facial features
- the face itself, its eyes and the nose or the mouth -
have been detected as a trusted result. This consid-
eration is used to reduce the possibility of false de-
tections, i.e. false positives. A color model is then
learned or updated (if already created for that individ-
ual) only from these trusted faces, reducing the prob-
ability of using erroneous face detections.
(a) (b) (c)
Figure 3: (a) Input image, (b) skin color segmentation, (c)
shirt color segmentation.
Eye locations allow the estimation of the face con-
tainer. In a lower position a second container is used
to select an area of the user’s shirt. Both containers
are utilized to model respectively the skin and shirt
colors of the user by means of a histogram based color
model (Swain and Ballard, 1991). Figure 3 presents
the segmentation of the input image, based of these
histograms, see Figure 3(b) for skin and Figure 3(c)
for shirt color-like areas. It can be observed that the
shirt is segmented easily but hands and skin-like ar-
eas, are not necessarily clear and compact.
Due to the sensitivity of the histogram based skin
color model, we analyzed another color model repre-
sentation. The mask of the skin blob extracted from
the face container determines the skin pixels to be em-
ployed as training samples, see Figure 4(a). The skin
color of each individual is then learned and further
adapted throughout tracking as a mixture of gaussians
in RG-color space (Fritsch et al., 2002), see Figure 4.
2.4 Hand Detection
Multiple difficulties are present regarding robust and
efficient hand detection in video, mainly due to the
AUTOMATIC INITIALIZATION FOR BODY TRACKING - Using Appearance to Learn a Model for Tracking Human
Upper Body Motions
537

inherent variability of the articulated hand structure,
the large domain of gestures, the restriction of real-
time performance, varying illumination conditions
and complex background clutter. Therefore, different
restrictions are commonly considered or even manual
initialization is performed for this task.
However, the literature is rich in hand detection
approaches that have traditionally been based on skin
color segmentation (Storring et al., 2004), due to their
reduced processing cost. Recent approaches (Stenger
et al., 2004; K
¨
olsch and Turk, 2004), however, have
utilized the Viola-Jones’ object detection framework
(Viola and Jones, 2004) even when hands are not that
easy to describe as faces. They are highly deformable
objects, so training a single cascade classifier for de-
tecting hands is a complex and arduous task. For
that reason, a different classifier for each recogniz-
able gesture has been trained (Stenger et al., 2004),
but also a single classifier for a limited set of hands
(K
¨
olsch and Turk, 2004).
Considering the unrestricted context considered,
where the use of multiple detectors would produce
an approach not suitable for real time processing, we
have chosen the skin color approach for faster pro-
cessing. However, instead of using a predefined color
space definition, the information obtained from the
face blob is used, as described above, to estimate the
skin color model for that individual, see Figure 4.
The skin color model is then employed to locate other
skin-like blobs in the image.
As we mentioned above, the approach considers
that both hands are visible, no gloves are used, their
distance to the face is similar, and that a vertical line
falling from the face center would leave each hand on
one side. If all those conditions fit, and two well pro-
portionated and coherent skin blobs are located then
they are suggested as hands candidates, and provided
to the 3D tracker initialization module, see Figure 5.
2.5 Human Body Model Acquisition
In our approach, the human body is modeled as a
kinematic 3D body model, see also (Schmidt et al.,
2006), composed of asymmetrically truncated cones
connected by joints as depicted in Figure 5. It resem-
bles the kinematic structure of the human body and
also incorporates the natural joint angle constraints.
In total, a pose of our model can be described by
14 degrees of freedom (DOF) for the joint angles (4
per arm) and the position and orientation in space (3
translational, 3 rotational).
The appearance of the human, in turn, is modeled
by the truncated cones. The proportions of the body
parts vary for each individual, but still, its characteris-
tics can be described quite well using a standardized
model, e.g., (Humanoid Animation Working Group,
2007) and adjusting the actual size of the limbs and
the kinematic configuration in proportion to the height
of the person. In this approach, we use a standard
body model and vary the overall size in the image
only, the size of the limbs and the kinematic structure
is kept constant.
(a)
(b)
(c)
Figure 4: (a) Skin color training pixels produced from the
face detection, (b) example skin locus and learned mixture
of gaussians in RG-color space, (c) resulting segmentation.
(a)
(b)
Figure 5: (a) Detected head and hands location, (b) articu-
lated 3D model for the upper body.
Estimating the correct pose is even more difficult
on a single frame than on a sequence where also tem-
poral dependencies could be used. Restrictions on the
scenario and the expected poses help to simplify the
task. For initialization, we assume the person to be
facing the robot with the arms outstretched. As a con-
sequence, the model can be constrained to be oriented
towards the camera and the arm limbs to move only in
a plane parallel to the image plane, having the elbow
relaxed. This allows reducing the number of DOF to
be determined during initialization to only 5 parame-
ters: Three for the model position and one for the el-
evation of each arm. In situations in which no hands
can be found, the arms are assumed to be close to the
torso, reducing the dimensionality d of the parameter
space further to 3.
The 2D distances between the detected face, d
F
,
and left and right hand features, d
HL
and d
HR
, and the
corresponding model limbs are converted into likeli-
hoods using the following Gaussian weighting func-
tion:
p(c) = exp
−
(d
c
)
2
2σ
2
c
(1)
where the standard deviations σ
c
are choosen to cover
the maximal observable distance depending on the
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
538

image size for each utilized feature c ∈ {F, HL, HR}.
For a number of different poses, these distances are
almost the same, as the positions of the face and the
hands in the image will not change drastically when
translating the model in the depth direction. The like-
lihood p(c) that a model pose x
t
at the current time t
causes the observation y
t
can be formulated as
p(y
t
| x
t
) =
∏
c∈{F,HL,HR}
p(c) (2)
with p(c) = 1 if the feature is not present. In the d-
dimensional space R
d
of all possible poses, an initial-
ization particle set SI
t
= {s
(n)
t
}
N
n=1
is used to represent
the observation density with the associated weights
{w
(n)
t
}
N
n=1
distributed according to p(x
t
| y
t
) and w
normalized to
∑
N
n=1
w
(n)
t
= 1.
Using this particle set, we employ a kernel parti-
cle filter for searching the pose space for initialization
postures agreeing with the results from the face and
hand detection. The result is a particle distribution
estimating the likelihood density in the reduced pa-
rameter space. The distribution indeed shows a good
estimation seen from the image plane perspective, but
it covers a wider range in the depth direction, as the
distance to the camera respective the size of the model
can only be determined indirectly.
Up to this point, the problem of fitting the model
to three given points in the image can be solved much
more easily, e.g., making use of inverse kinemat-
ics. But using a multiple-hypothesis approach for
both tracking and initialization gives us the advan-
tage of allowing for the initialization procedure to
generate more than one possible outcome and also
leaves room for further extensions of the presented
approach, which will possibly result in higher dimen-
sional statespaces.
2.6 3D Body Model Tracking
For estimating the pose of the human in a new frame,
we apply the monocular 3D body model tracking al-
gorithm presented in (Schmidt et al., 2006). The hu-
man upper body is tracked using the model depicted
in Figure 5 with 14 DOF. To match a given pose of
the model with the image data, the 3D body model is
backprojected into the image resulting in a 2D poly-
gon representation. For each limb, several cues based
on color (skin, mean color) and/or intensity (edge,
ridge) are evaluated. To give an example, the edge
cue evaluates the intensity gradient at the boundary of
the 2D polygon representing the arm limb. The like-
lihood for a specific pose is obtained by fusing the
filter responses for all cues and all limbs and transfer-
ring them into likelihoods with a cue-specific weight-
ing function representing the expected characteristics
of the cue. Combining multiple cues makes the es-
timation more robust against local disturbances but
typically also results in a high number of false local
maxima in the parameter space.
The problem of estimating the correct pose of the
model for each image can now be expressed as find-
ing the one local maximum in the high-dimensional
parameter space, that fits best the current pose while
still obeying all given constraints, e.g., the joint angle
limits. This pose estimation for a complicated articu-
lated model from monocular observations is a highly
ambiguous task. The resulting posterior likelihoods
over human pose space are typically multi-modal with
a high number of false local maxima. When evolv-
ing over time, new modes often emerge from regions
with low probability while existing modes degener-
ate or even vanish. To track the correct pose of the
human, the structure of the high-dimensional proba-
bility density has to be efficiently exploited, taking
into account the constraints and the dynamics of the
model. The utilized kernel particle filter (Schmidt
et al., 2006) propagates such multi-modal distribu-
tions and provides a probabilistic search for the best
matching body configuration.
A major problem of all tracking approaches is the
tendency to get stuck in false local maxima. To over-
come this drawback, the presented approach adds a
recovery component to the existing tracking frame-
work. Recovering from tracking errors is achieved by
inserting a fixed percentage α (e.g., 5% - 20%) of par-
ticles from the initialization distribution SI
t
into the
tracking distribution ST
t
:
{ST
t
}
bα·Nc
n=1
= Φ(SI
t
, n) (3)
with Φ(SI
t
) sampling from the distribution accord-
ing to the weight of the particles. These particles do
not necessarily represent the correct pose and in most
cases will be neglected during the tracking process. If
the tracking gets stuck in a wrong pose, the recovery
particles explore the parameter space in a region out-
side of the current search radius of the tracking pro-
cess while they are still more directed - and therefore
more likely to resemble the correct pose - than ran-
domly distributed particles.
2.7 Integration
All the modules have been implemented as plugins for
a graphical plugin shell (L
¨
omker et al., 2006), which
provides a framework for image grabbing, display,
etc. The plugins are written in C/C++, making some
of them use of the OpenCV (Intel, 2006) libraries for
image analysis. An integration architecture (Fritsch
AUTOMATIC INITIALIZATION FOR BODY TRACKING - Using Appearance to Learn a Model for Tracking Human
Upper Body Motions
539
and Wrede, 2007) is used for communication between
different modules, which allows us to split the sys-
tem up into multiple instances distributed to differ-
ent computers in a network or to different cores on
the same computer. Currently, the system is divided
into four instances: 1) face and hand detection, 2)
color modeling, 3) initial distribution generation and
4) body model tracking.
3 EXPERIMENTS
For evaluation, the system has been applied to image
sequences of three persons pointing at objects on a
table with 836 frames in total.
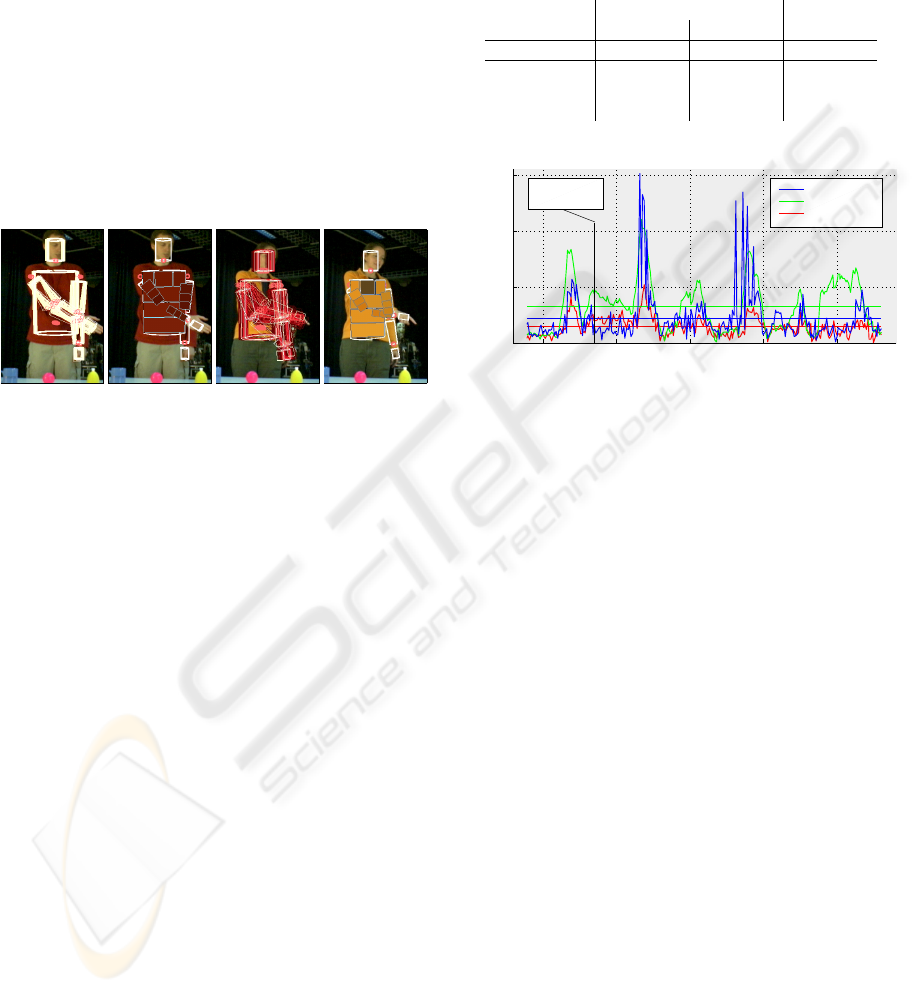
(a) (b) (c) (d)
Figure 6: Results for subjects B (a-b) and C (c-d) from
tracking with learned body model: (a) and (c) show the most
likely poses, (b) and (d) the final tracking results.
Given the position of the face in an image, either
the height of the person or the distance to the camera
can be determined due to the monocular setup. For the
experiments we assumed a fixed height for the person,
thus only varying the distance during initialization.
Ground truth has been generated by manually an-
notating the position of the hands and the head. To
show the effectiveness of the presented approach both
for initialization and recovery from tracking failures,
the automatic initialization setup is compared to the
manually initialized setup as described in (Schmidt
et al., 2006). For the latter, we still need a relatively
high number of particles to ensure robust tracking
over a longer image sequence, furthermore it is nec-
essary to adjust the measures of the body model for
each person accurately. We configure the system in
two ways: 1) 1500 particles and 6 meanshift itera-
tions, 2) 500 particles and three meanshift iterations.
The automatically initialized system is also set up to
use 500 particles, three mean shift iterations but uses
a generic body model for all subjects. For each it-
eration, α = 5% recovery particles are inserted into
the tracking distribution. All setups employ the same
cues with identical parameterization.
Figure 6 shows typical tracking results using the
automatically acquired body model. For Figure 6(a)
and (c) the most likely poses are colord white, less
Table 1: Position error RMSE (root mean squared error) and
standard deviation σ in pixel. Comparison of three setups:
manual initialization with 1500 particles and with 500 par-
ticles, automatic initialization and error recovery with 500
particles (presented approach). The colored mean error val-
ues for subject B can also be seen in Figure 7.
manual initialization automatic init
1500 particles 500 particles 500 particles
sequence # pict. RMSE σ RMSE σ RMSE σ
subj A 318 18.73 13.87 52.65 41.31 30.11 26.05
subj B 242 14.52 8.58 32.86 23.26 21.96 22.13
subj C 276 12.04 10.14 72.64 38.30 54.82 57.76
200 250 300 350 400
0
50
100
150
image #
error [pixel]
automaic init
500 particles
1500 particles
see image in
Figure 6 (a,b)
Figure 7: Comparing tracking errors of subject B for man-
ual and automatic initialization setups. Also compare to Ta-
ble 1. Note the tracking loss around frames 265 and 340
and the recovery afterwards.
likely poses red. Note the multi-modal distribution
in Figure 6(c) due to ambiguous measurements of the
pose. Figure 6(b) and (d) show the final tracking re-
sult and the learned shirt color.
Table 1 shows the tracking quality as the differ-
ences between the annotated position of the right hand
and the model position projected into the image plane
as RMSE and standard deviation in pixel for each se-
quence. For the presented approach, the RMSE stays
between 20 – 55 pixel, which is accurate enough for
detecting gestures in a human robot interaction sce-
nario (Haasch et al., 2005). In contrast to the exist-
ing tracking approach, the standard deviation is much
higher for the presented approach, which suggests
that the tracking suffers from losses but is often able
to recover again as depicted in Figure 7 taking sub-
ject B as an example (blue line). Tracking gets lost
around frames 265 and 340, but as soon as the situa-
tion gets less complicated, the inserted recovery parti-
cles are able to guide the tracking towards the correct
pose again. Thus, the loss is only temporary and re-
sults in a comparably low RMSE as for 1500 particles
(red line), but using only a third of the number of par-
ticles. Employing an identical parameterization using
500 particles but without the automatic initialization
and recovery behaviour leads to an even less accurate
tracking (green line) with a 30% higher error in aver-
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
540

age. For subject C, the system tends to lose tracking
over and over again for sophisticated postures, e.g.,
the hand pointing directly towards the camera, where
also the recovery component does not work result-
ing in high errors for both approaches. The scaled
standard body model does not suit this subject well
enough. This is also reflected by the high RMSE of
more than 70 pixel. Actually, the tracking was stuck
in one position while the person moved, producing
varying error values. Robust tracking for this subject
is nevertheless possible. The former approach applied
a personalized body model and an increased compu-
tational effort, yielding accurate results. This clearly
shows the limits of the presented approach and calls
for automatically adapted model kinematics and limb
sizes
The usability of the presented system for the hu-
man robot interaction is much higher compared to the
former tracking approach. Persons interacting with
such a system now have the possibility to repeat un-
recognized gestures.
4 CONCLUSIONS AND
OUTLOOK
In this paper we have defined an approach to acquire
a human body model in the human robot interaction
context. In that scenario, it is expected that the hu-
man will try to make himself or herself visible. We
can therefore make use of a currently available face
detector as a starting hint.
Following this idea, we have built a prototype sys-
tem that makes use of a robust face detection algo-
rithm and some common sense considerations con-
cerning the given task and scenario during a human
robot interaction session. The system is able to pro-
vide initialization data and also validation data to a
tracking framework. This second feature is of great
interest for building a robust 3D body tracker. The
main features of this prototype are that the process is
performed close to real time with a monocular and un-
calibrated camera, without the requirement of mark-
ers nor the restriction of a static camera. The system is
currently performing asynchronously. Face and hand
detection perform in real-time while initialization and
tracking still require more computational power and
provide results in the order of one frame per second
without optimized code.
The prototype presented here has tackled a re-
duced number of sequences, the achieved results are
promising. Appearance based initialization of the
model and initialization of the body tracking system
performs robustly throughout the applied sequences,
making the system more usable for human robot in-
teraction. The possibility to validate the tracking and
recover it from errors is an important step towards ro-
bust system design.
For that reason, in short term the prototype re-
quires a harder experimental evaluation setup consid-
ering different scenarios (e.g., sitting at a desk), more
sophisticated conditions (e.g., skin colored back-
grounds, moving camera), and a larger set of individ-
uals and gestures performed. For further evaluation,
using 3D ground truth data, e.g., (Sigal and Black,
2006b) is desirable to also capture the depth accuracy
of the tracking system.
Automatic and appearance independent body
model acquisition provides new cues which can be
of great use not only to improve the face detection,
but also for person tracking or identification. The lat-
ter argument is not new, e.g., humans do not make
use of inner facial features only for recognition (Sinha
and Poggio, 1996). In this sense, multimodal recogni-
tion has recently become a topic of interest. Many of
these approaches, however, mainly focus on face and
voice modalities, neglecting kinematic properties of
the body or simple features such as shirt color that do
not change during an interaction session. Additional
cues can provide greater robustness in the context
of real world recognition applications where a robot
is moving, environmental conditions are not control-
lable or people are not permanently facing the robot.
ACKNOWLEDGEMENTS
Work partially funded by the Spanish Ministry of Educa-
tion and Science and FEDER funds (TIN2004-07087) and
the Department of Universities and Research of the Canary
Islands Government.
REFERENCES
Bissacco, A., Yang, M.-H., and Soatto, S. (2007). Fast hu-
man pose estimation using appearance and motion via
multi-dimensional boosting regression. In Proceed-
ings of IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Brox, T., Rosenhahn, B., Kersting, U., and Cremers, D.
(2006). Nonparametric density estimation for human
pose tracking. In Franke, K., Mueller, R., Nicko-
lay, B., and Schaefer, R., editors, Pattern Recognition
2006, DAGM, volume 4174, pages 546–555, Berlin.
LNCS, Springer-Verlag, Berlin Heidelberg.
Castrill
´
on Santana, M., D
´
eniz Su
´
arez, O.,
Hern
´
andez Tejera, M., and Guerra Artal, C. (2007).
ENCARA2: Real-time detection of multiple faces
at different resolutions in video streams. Journal of
AUTOMATIC INITIALIZATION FOR BODY TRACKING - Using Appearance to Learn a Model for Tracking Human
Upper Body Motions
541

Visual Communication and Image Representation,
pages 130–140.
Fritsch, J., Lang, S., Kleinehagenbrock, M., Fink, G. A.,
and Sagerer, G. (2002). Improving adaptive skin color
segmentation by incorporating results from face de-
tection. In Int. Workshop on Robot and Human Inter-
active Communication (ROMAN), pages 337–343.
Fritsch, J. and Wrede, S. (2007). Software Engineering for
Experimental Robotics, volume 30 of Springer Tracts
in Advanced Robotics, chapter An Integration Frame-
work for Developing Interactive Robots, pages 291–
305. Springer, Berlin.
Gavrila, D. M. (1999). The visual analysis of human move-
ment: A survey. Computer Vision and Image Under-
standing: CVIU, 73(1):82–98.
Haasch, A., Hofemann, N., Fritsch, J., and Sagerer, G.
(2005). A multi-modal object attention system for a
mobile robot. In Int. Conf. on Intelligent Robots and
Systems, pages 1499–1504.
Humanoid Animation Working Group (2007). Information
technology – Computer graphics and image process-
ing – Humanoid animation (H-Anim). http://www.h-
anim.org/.
Intel (2006). Intel Open Source Computer Vision Library,
v1.0. www.intel.com/research/mrl/research/opencv.
Johansson, G. (1973). Visual perception of biological mo-
tion and a model for its analysis. Perception and Psy-
chophysics, 14:201–211.
K
¨
olsch, M. and Turk, M. (2004). Robust hand detection. In
Proceedings of the International Conference on Auto-
matic Face and Gesture Recognition.
Lee, M. and Cohen, I. (2004). Human upper body pose es-
timation in static images. In Proc. of European Con-
ference on Computer Vision ECCV), pages 126–138.
L
¨
omker, F., Wrede, S., Hanheide, M., and Fritsch, J. (2006).
Building modular vision systems with a graphical plu-
gin environment. In Proc. of International Conference
on Vision Systems, page 2, St. Johns University, Man-
hattan, New York City, USA. IEEE.
McNeill, D. (1992). Hand and Mind: What Gestures Reveal
about Thought. University of Chicago Press.
Moeslund, T. B. and Granum, E. (2001). A survey of com-
puter vision-based human motion capture. Computer
Vision and Image Understanding: CVIU, 81(3):231–
268.
Ramanan, D. and Forsyth, D. A. (2003). Finding and track-
ing people from the bottom up. In Conf. on Computer
Vision and Pattern Recognition, volume 2, pages 467–
474.
S. Knoop, S. Vacek, R. D. (2006). Sensor fusion for 3d hu-
man body tracking with an articulated 3d body model.
In Proceedings of the IEEE International Conference
on Robotics and Automation, pages 1686–1691, Walt
Disney Resort, Orlando, Florida.
Schmidt, J., Kwolek, B., and Fritsch, J. (2006). Kernel
Particle Filter for Real-Time 3D Body Tracking in
Monocular Color Images. In Proc. of Automatic Face
and Gesture Recognition, pages 567–572, Southamp-
ton, UK. IEEE.
Schneiderman, H. and Kanade, T. (2000). A statistical
method for 3d object detection applied to faces and
cars. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 1746–1759.
Sidenbladh, H., Black, M., and Fleet, D. (2000). Stochastic
tracking of 3D human figures using 2D image motion.
In Europ. Conf. on Computer Vision, pages 702–718.
Sigal, L., Bhatia, S., Roth, S., Black, M. J., and Isard, M.
(2004). Tracking loose-limbed people. In Conf. on
Computer Vision and Pattern Recognition, volume 1,
pages 421–428.
Sigal, L. and Black, M. J. (2006a). Predicting 3d people
from 2d pictures. In IV Conference on Articulated Mo-
tion and Deformable Objects - AMDO 2006, volume
4069, pages 185–195, Mallorca, Spain. IEEE Com-
puter Society, LNCS.
Sigal, L. and Black, M. J. (2006b). Synchronized video
and motion capture dataset for evaluation of articu-
lated human motion. Technical Report Techniacl Re-
port CS-06-08, Brown University.
Sinha, P. and Poggio, T. (1996). I think I know that face ...
Nature, 384(6608):384–404.
Sminchisescu, C. and Triggs, B. (2005). Mapping minima
and transitions of visual models. Int. J. of Computer
Vision, 61(1).
Stenger, B., Thayananthan, A., Torr, P., and Cipolla:, R.
(2004). Hand pose estimation using hierarchical de-
tection. In ECCV Workshop on HCI, pages 102–112.
Storring, M., Moeslund, T., Y.Liu, and Granum, E. (2004).
Computer vision-based gesture recognition for an
augmented reality interface. In 4th IASTED Inter-
national Conference on VISUALIZATION, IMAGING,
AND IMAGE PROCESSING, pages 766–771.
Swain, M. J. and Ballard, D. H. (1991). Color indexing.
International Journal on Computer Vision, 7(1):11–
32.
Taycher, L., Shakhnarovich, G., Demirdjian, D., and Dar-
rell, T. (2006). Conditional random people: Tracking
humans with crfs and grid filters. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 222–229.
Urtasun, R., Fleet, D., and Fua, P. (2005). Monocular
3d tracking of the golf swing. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
page 1199, San Diego.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International Journal of Computer Vision,
57(2):151–173.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
542
