
A FULLY AUTOMATIC RED-EYES DETECTION AND
CORRECTION ALGORITHM BASED ON UNIFORM COLOR
METRIC AND BINOCULAR GEOMETRIC CONSTRAINT
Chun-Hsien Chou
*
, Kuo-Cheng Liu
*,**
and Shao-Wei Su
*
*
Department of Electrical Engineering, Tatung University, Taiwan
**
Foreign Language and Information Educating Center, Taiwan Hospitality and Tourism College
Keywords: Red-eye, Digital photography, Digital cameras, Uniform color space, Color difference.
Abstract: Red-eye is a highly objectionable defect that often occurs in digital images taken with a flash by modern
small cameras. Although many red-eye reduction algorithms were proposed and equipped in most of the
digital cameras, none of these algorithms is effective enough. In this paper, an algorithm for automatic de-
tection and correction of red-eyes is proposed. The color detector based on uniform color metric is devel-
oped to locate regions of major colors including red-eye color and skin tone. The structure of major colors
is adopted to locate candidate red-eye regions. The geometric relationship between the dimension of the
human pupil and binocular distance is employed to eliminate most false positives (image regions that look
like red-eyes but are not). More than one pairs of red-eyes snapped in different view angles are detected by
the proposed algorithm. Detected red-eyes are then corrected by modifying chroma, hue angles and lumi-
nance of the associated pixels such that red color is removed while maintaining a natural look of the eye.
Simulation results show that the proposed algorithm is pretty robust and effective.
1 INTRODUCTION
Red-eye is a common problem in digital photogra-
phy. When an image is captured with flash illumi-
nation by a camera that has an illumination source
very close to the camera lens, the bright flash light
reflected from the blood vessels on the retina, giving
the human eyes in the image an unnatural red hue.
Red-eye is a hardly acceptable defect that signifi-
cantly reduces the value of an image.
For this reason, many efforts have been made to
prevent it from occurring, or to detect and correct it
in the post-capture processing. A straightforward
way of preventing red-eye is to increase the distance
between the illumination source and the camera lens.
Another solution for red-eye prevention is the use of
a pre-exposure flash that decreases the size of the
subject’s pupil followed by a second flash for cap-
turing the image. The drawback of this approach is
the great consumption of power that shortens the
battery life. Moreover, this approach sometimes can
only reduce, but not eliminate, the red-eye artifacts.
Many research results have been developed and im-
plemented as software products such as “Picture
Maker” from Eastman Kodak Company and
“iPhoto” from Apple. These products require man-
ual manipulation to outline the red-eye region for
correction. It is obviously impractical and ineffi-
cient to process a large number of images manually.
A fully automatic red-eye detection and correction
algorithm is therefore needed. Furthermore, it is
highly expected that this automatic algorithm can be
realized as a piece of hardware and planted in digital
cameras. Recently, a number of researches on
automatic red-eye detection and correction have
been conducted (Schildkraut and Gray, 2002)-
(Zhang, Sun, Li, and Zhang, 2004). The AREA al-
gorithm proposed by Eastman Kodak Company uses
features based on red-eye defects to automatically
detect only a pair of red-eyes in each image
(Schildkraut and Gray, 2002). In (
Matthew and
Robert, 2002), the face must be successfully de-
tected before the red-eye detection where the infor-
mation of color, intensity and dimension is utilized.
In (Ioffe, 2003), a learning-based face detector is
also adopted for the detection of red-eye defects. In
these approaches, the face detection itself is another
challenging problem to be solved (
Xin, Xu, and Du,
1998). In (Zhang, Sun, Li, and Zhang, 2004), a heu-
ristic algorithm is used to detect candidate red-eye
263
Chou C., Liu K. and Su S. (2008).
A FULLY AUTOMATIC RED-EYES DETECTION AND CORRECTION ALGORITHM BASED ON UNIFORM COLOR METRIC AND BINOCULAR
GEOMETRIC CONSTRAINT.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 263-266
DOI: 10.5220/0001065302630266
Copyright
c
SciTePress
regions, and then an eye classifier is utilized to con-
firm whether the candidate region is a red-eye.
Color is important information to the detection
and correction of red-eye artifacts. In this paper,
color classifiers based on uniform color metric are
first designed to detect colors of red-eyes, skin tones
and colors without red hue. The relationship among
these colors and the geometric constraints inherent
in pairs of human eyes are exploited to eliminate
false positives. Finally, the information of hue,
chroma and luminance is utilized to restore the red-
eye color to a natural tone.
2 UNIFORMITY OF THE CIELAB
COLOR SPACE
Color is a visual perception of the light in the visible
region of the electromagnetic wave spectrum inci-
dent on the human retina. By the theory of trichro-
macy, any color in a color space can be represented
by a triple of numbers called tristimulus values (CIE,
1986), (Sangwine and Horne, 1998). However, col-
ors in many color spaces, such as RGB, XYZ, YUV,
and YC
b
C
r
, are not uniformly distributed in a sense
that the same perceptual color difference does not
correspond to the same distance enumerated in the
tristimulus space (Sangwine and Horne, 1998),
(Sharma and Trusell, 1997). If a color space is per-
ceptually uniform, the perceptual difference between
any two colors can be ideally represented as the
Euclidean distance between their coordinates. The
CIELAB color space is such a color space to over-
come the non-uniform color metric that had been
discussed by MacAdam (MacAdam, 1943). In this
paper, the color transformation to CIELAB color
space is
3 THE PROPOSED RED-EYE
DETECTION ALGORITHM
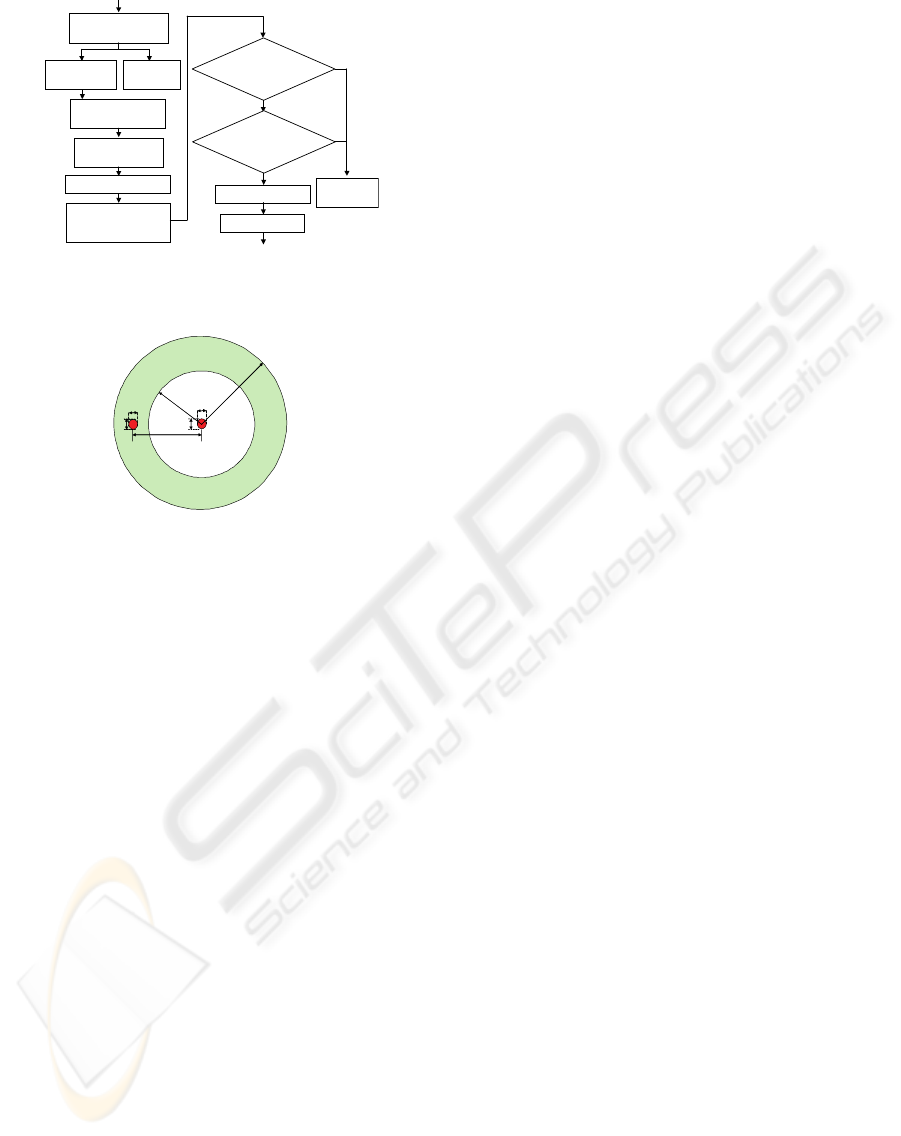
The functional block diagram of the proposed red-
eye detection algorithm is shown in Figure 1. The
color image is first transformed to CIELAB color
space. Through the uniformity in the CIELAB, the
red-eye color and skin color are roughly extracted.
According to the database containing all kinds of
red-eye samples, a more precise red-eye color filter
is then developed by the method of K-mean cluster-
ing and just-noticeable color difference in the
CIELAB color space. The correlation between the
size of the human eyeball and binocular distance is
finally employed to eliminate most false positives
Through statistically analyzing the manually ex-
tracted red-eye color pixel and skin color pixel from
various color images, the distribution of red-eye
colors and skin colors in CIELAB color space can be
found. For each pixel in the color image, the tris-
timulus values of red-eye color pixels in CIELAB
color space satisfy
⎪
⎩
⎪
⎨
⎧
<<
<<
>
5025-
8020
30 L
b
a
, (1)
and the tristimulus values of skin color pixels in
CIELAB color space satisfy
⎪
⎩
⎪
⎨
⎧
<<
<<
>
255-
205-
30 L
b
a
. (2)
In this paper, the skin color is the reference informa-
tion that is used to delete image regions that look
like red-eyes but are not.
The method of K-means clustering is used to cal-
culate the centroid in the red-eye set as the major
red-eye color. Clustering in pattern recognition is
the process of partitioning a set of pattern vectors
into subsets called clusters. In this paper, the num-
ber of centroids found by the clustering method is 32.
As described in Section 2, the perceptual difference
Transform an image into
CIELAB color space
Roughly red-eye
color filtering
Precisely red-eye color
filtering by MRCR
Noise reduction by
morphological process
Locate red-eye candidates
Find the geometric
relationship between each
pair of red-eye candidates
Skin color
segmentation
Test if the geometric
relationship satisfies
binocular constraint
Test if the red-eye
candidates are surrounded
by skin color pixels
Recover red-eye pixels
Red-eye correction
Color image
Detection result
Delete red-eye
candidates
Ye s
Ye s
No
No
Figure 1: The function block diagram of the proposed
red-eye detection algorithm.
B
D
D
w1
R
1
R
2
red-eye
candidate
search
area
D
h1
D
w2
D
h2
Figure 2: Binocular geometric relationship between a
pair of red-eyes.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
264
between any two colors can be ideally represented as
the Euclidean distance between their coordinates in
the CIELAB color space, and loci of colors which
are perceptually indistinguishable from a particular
color form a sphere centralized at this color’s coor-
dinate. In this color space, two colors are considered
perceptually distinguishable if the Euclidean dis-
tance between these two colors’ coordinates exceeds
a threshold of just-noticeable color difference
(JNCD). That is
()
Lab
21
222
JNCDbaLE ≥Δ+Δ+Δ=Δ
(3)
where JNCD
Lab
has been found around 3.0. There-
fore, the major red-eye color region (MRCR) can be
defined as a sphere for each major red-eye color.
The colors locating in the MRCR of each centroid
are selected as the color pixel in the red-eye.
In previous detection steps, some noises occur in
the preliminary red-eye segmentation area. To re-
duce the noise, morphological process is utilized. In
this paper, two morphology operations, including
dilation “D” and erosion “E”, are used. The former
operation adds pixels to the object boundaries, while
the later operation removes pixels on object bounda-
ries in an image. The two operations are combined
to build a higher order opening operation “O” for
removing noises from the red-eye segmentation area
while preserving the shape and size of this red-eye
segmentation area in the image.
O(I, B
E
, B
D
)=D(E(I,B
E
), B
D
) (4)
where I is the binary image that marks the location
of selected red-eye pixel, B
E
the structuring element
for erosion, and B
D
the structuring element for dila-
tion. The structuring element of dilation is smaller
than that of erosion such that the morphological
process can reduce noises that occur in the red-eye
segmentation area and avoid losing the red-eye can-
didates.
By using color information and morphological
process, red-eye candidates are located. However,
many detected image regions that look like red-eyes
but are not. The color pixels in such regions are
called false positive candidates. Hence, geometric
relationship between each pair of red-eye candidates
is considered. Since the distance between a pair of
red-eyes is useful to eliminate the false positive can-
didate, binocular geometric relationship is used to
develop binocular geometric constraint for removing
false positives. For a red-eye candidate shown in
Figure 2, the green circular region centralized at this
candidate is used to test whether its red-eye counter-
part locates in this region. From the statistical
analysis of a large number of data sets, the range of
the green circular region is constrained by
R
1
> 4D
w1
,
(5)
R
2
< 10D
w1
.
(6)
The pair of red-eye candidates is further tested if its
width and height can satisfy
0.75 < D
w2
/D
w1
< 1.30, (7)
0.75 < D
h2
/D
h1
< 1.30. (8)
If the width and height of the pair of red-eye candi-
dates cannot satisfy Eq. (7) and (8), the pair of red-
eye candidates will be removed.
Finally, the pair of red-eye candidates that pass
through the binocular geometric constraint is tested
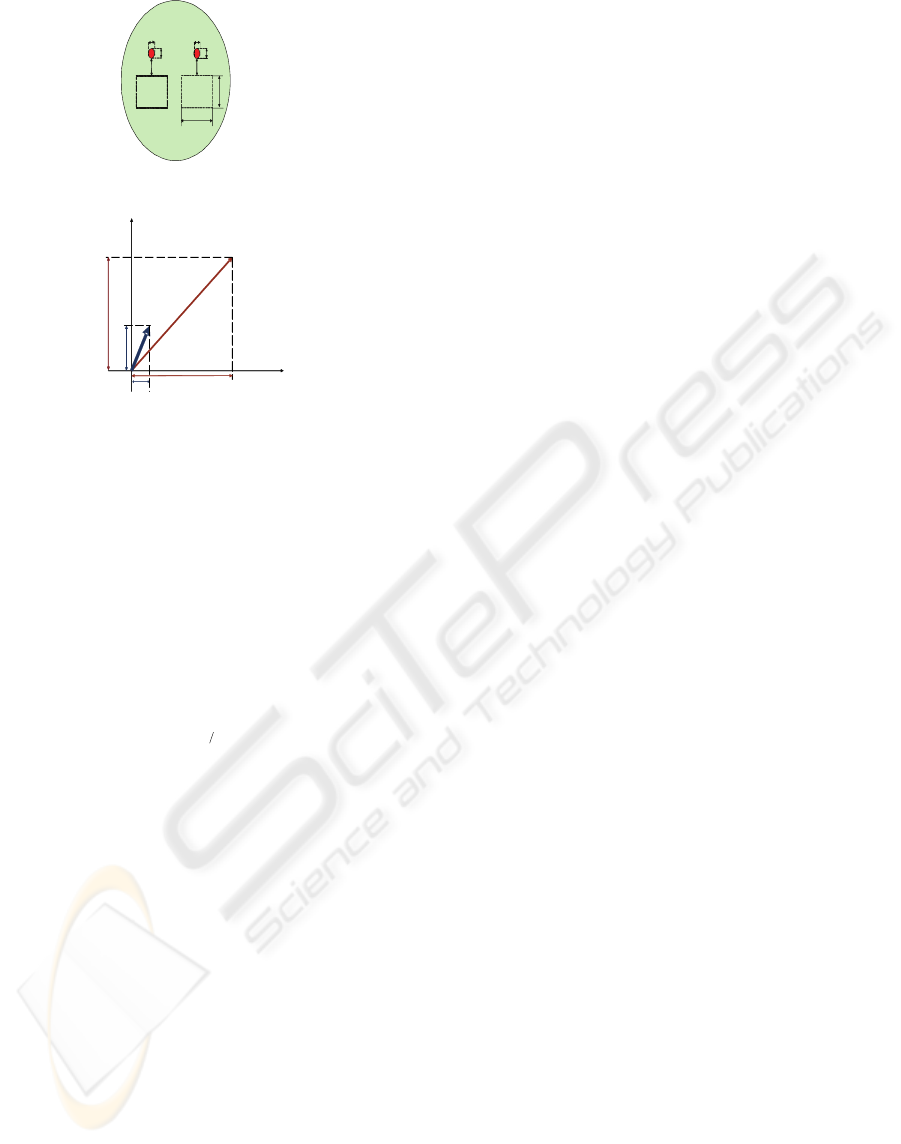
if it is surrounded by pixels of skin color tones. The
surrounding skin color pixels of red-eye candidates
are simply defined as two areas as shown in Figure 3.
The width and height of the area are 1.5D
h
and 3D
w
,
respectively. The area is recognized as skin color if
the amount of skin color pixels, N
skin
, that satisfy Eq.
(2) is high enough, or
N
skin
/(1.5D
h
× 3D
w
) >0.8. (9)
4 RECOVERY AND COLOR
CORRECTION OF RED-EYES
Since some red-eye color pixels are removed from
the red-eye candidates in the previous processes, it is
D
w
Skin Colo
r
Searc
h
A
re
a
D
w
Skin
Color
Searc
h
A
rea
1.5
D
h
1.5
D
h
3
D
w
re
d
-
eye
candidat
e
Figure 3: The surrounding skin color pixels of red-eye
candidates.
a
b
a
r
b
r
0.1a
r
The detected red-eye
The natural
pupil
0.2b
r
Figure 4: The color relationship between red-eye and
its natural appearance on color-opponent ab plane.
A FULLY AUTOMATIC RED-EYES DETECTION AND CORRECTION ALGORITHM BASED ON UNIFORM
COLOR METRIC AND BINOCULAR GEOMETRIC CONSTRAINT
265

therefore required to retrieve the lost red-eye color
pixels. The region of the red-eye candidate is sim-
ply extended by its neighboring red-eye color pixels.
That is, the boundary of the red-eye candidate region
centered on its center location is enlarged pixel by
one pixel to form a perfectly retrieved region of the
candidate.
Once the location and size of the red-eyes have
been detected, color correction of red-eyes is applied
to the detected red-eyes to obtain the natural appear-
ance of the pupil. To maintain the natural appear-
ance of the pupil at the location of red-eyes, the
value of luminance (L component) of the detected
red-eye is slightly adjusted and the values of hue and
chroma (a and b components) are adjusted based the
color relationship between red-eye and the corre-
sponding natural appearance of pupils on color-
opponent ab plane. For simplicity, the adjustment
for color correction is to scale down the value of a
component of red-eyes by a factor of 0.1 and to scale
down the value of b component of red-eyes by a
factor of 0.2 as shown in Figure 4. The value of
luminance of the detected red-eye is adjusted by a
factor of 0.9. That is,
L
corrected
= 0.9 × L
r
(10)
a
corrected
= 0.1 × a
r
(11)
b
corrected
= 0.2 × b
r
(12)
where (L
r
, a
r
, b
r
) and (L
corrected
, a
corrected
, b
corrected
) are
tristimulus values of the detected red-eye color pixel
and its corrected color pixel, respectively.
5 SIMULATION RESULTS AND
CONCLUSIONS
To evaluate the performance of the proposed algo-
rithm, the simulation of the red-eye detection algo-
rithm that is applied to red-eye digital images with
different size and quality is conducted. In Figure 5,
the “Pinksisters” image that has more than one pairs
of red-eyes is also detected and corrected by using
the proposed algorithm. In our experiments, over
200 red-eye digital photographs are tested and more
than 80% red-eyes are efficiently detected. The ex-
perimental results show that the proposed algorithm
is robust and effective under a variety of shooting
conditions and backgrounds.
In this paper, a fully automatic red-eyes detection
and correction algorithm is proposed. In the pro-
posed algorithm, a robust color classifier for detect-
ing red-eye color and other major colors in digital
images with red-eyes is developed and a multi-stage
criterion for detecting each single red-eye is de-
signed. The detected red-eyes are successfully cor-
rected by modifying chroma, hue angles and lumi-
nance of the associated pixels such that red color is
removed while maintaining a natural look of the eye.
The proposed system has very low false detection
rate. Simulation results show that more than 80% of
red-eyes can be detected and only 5% are false
alarm.
REFERENCES
Schildkraut, J.S. and Gray, R.T., 2002. “A fully automatic
red-eye detection and correction algorithm,” in Proc.
Int. Conf. on Image Processing ICIP, pp. I-801~803.
Matthew, G. and Robert, U. 2002. “Automatic red-eye
detection and correction,” in Proc. Int. Conf. on Image
Processing ICIP, pp. I-804~807.
Ioffe, S. 2003. “Red eye detection with machine learning,”
in Proc. Int. Conf. on Image Processing ICIP, pp. II-
871~874.
Zhang, L., Sun, Y. F., Li, M. J., and Zhang, H. J., 2004.
“Automated red-eye detection in digital photography,”
in Proc. Int. Conf. on Image Processing ICIP, pp.
2363-2366.
Xin, Z., Xu, Y. J., and Du, L. M., 1998. “Locating facial
features with color information,” in Proc. Int. Conf. on
Image Processing ICIP, Vol. 2, pp. 889-892.
CIE, 1986. Colorimetry, CIE Pub. No. 15.2, CIE Central.
Bureau, Vienna, Austria.
Sangwine, S. J. and Horne, R. E. N., 1998. The Colour
Image Processing Handbook. London: Chapman and
Hall.
Sharma, G. and Trusell, H. J. 1997. “Digital color imag-
ing,” IEEE Trans. on Image Processing, vol. 6, pp.
901-932.
MacAdam, D. L., 1943. “Specification of small chroma-
ticity differences,” J. Opt. Soc. Am, vol. 33, pp. 18-26.
(a)
Figure 5 (a): “Pinksisters” image with red-eyes, (b) the
image after correcting red-eye colors.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
266
