
BIO-INSPIRED IMAGE PROCESSING FOR VISION AIDS
C. Morillas, F. Pelayo, J. P. Cobos, A. Prieto
Department of Computer Architecture and Technology, University of Granada, Spain
S. Romero
Department of Computer Science, University of Jaén, Spain
Keywords: Bioinspired real-time image processing, vision aids, neuromorphic encoding, visual neuroprostheses.
Abstract: We present in this paper a system conceived to perform a bioinspired image processing and different output
encoding schemes, oriented to the development of visual aids for the blind or for visually-impaired patients.
We remark some of its main features, as the possibility of combining different image processing modalities
(colour, motion, depth, etc.) and different output devices (Head Mounted Displays, headphones, and
microelectrode arrays), as well as its implementation on a reconfigurable chip (FPGA) or a specific VLSI
chip, which allows working in real time on a portable equipment. A software design environment has been
developed for the simulation and the automatic synthesis of the processing models into a hardware platform.
1 INTRODUCTION
Visual impairment is considered as one of the 4
main causes for the loss of self-sufficiency among
elderly people. With different affection degrees,
visual impairment affects about a 25% of persons
over 65 years old, and a 15% of adults between 45
and 65 years old. In addition, the progressive ageing
of the population in developed countries makes these
numbers grow forth, propitiating a remarkable loss
in visual acuity and a reduction of the visual field. In
this context, retinal degenerations (especially the
age-related macular degeneration, ARMD),
cataracts, glaucoma, diabetic retinopathy, optic
nerve damage, and ocular traumas, yield a relevant
amount of blindness cases, often non-curable.
Visually impaired patients require optical aids
(microscopes, magnifiers, telescopes, optic filters) to
enhance their quality of life, exploiting their
remaining functional vision. However, there is no a
unique aid able to provide this enhancement under
any circumstance. Electronic aids, as (LVES, 1994)
V-MAX, or the recent (JORDY, 2007) provide a
more efficient use of the visual functional remains of
the patient by magnifying images, enhancing
light/darkness and colour contrasts, but none of
these systems are able to implement an efficient
control of local gain to produce clear and sharp
images in a variety of lighting situations. These
devices also use to be relatively heavy (0.5 to 1 Kg.),
quite expensive and difficult to manipulate during
motion. These reasons led us to propose the system
described in this paper, which is inspired by the way
the biological retina works, and is fully adaptable
and configurable to each patient.
The retina-like design, not only at a functional
level, but also at an architectural level, is a key
aspect in the development of a robust and efficient
system able to apply in real time local spatio-
temporal contrast processing of the visual
information. The final system has been developed on
a reconfigurable hardware platform in order to
provide real-time and portable solutions for visual
processing that fit to the particularities of the visual
impairment of every person, and which can be tuned
according to its evolution with time. According to
diversity of affections, different output encoding
modalities have been considered, including acoustic
encoding, high resolution image for Head Mounted
Displays and neuromorphic encoding for
neuroprostheses.
The next section is devoted to explain the
bioinspired image processing in the system we
present, and its main architecture. In section 3, a
spike event encoding method is detailed, that is able
to produce trains of electrical signals intended to
63
Morillas C., Pelayo F., P. Cobos J., Prieto A. and Romero S. (2008).
BIO-INSPIRED IMAGE PROCESSING FOR VISION AIDS.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 63-69
DOI: 10.5220/0001063500630069
Copyright
c
SciTePress
stimulate neurons of the human visual system.
Section 4 describes an acoustic signal generation
module, that allows to the blind to localize those
objects in the visual environment that produce
higher activity levels. Finally real-time hardware
implementation is presented and conclusions are
summarized.
2 BIOINSPIRED IMAGE
PROCESSING
The development of a bioinspired system for visual
processing is being pursued by several research
groups, as the tuneable retinal encoder, by
(Eckmiller, 1999), or the computational models of
retinal functions described by (Koch, 1986). The
CORTIVIS (Cortical Visual Neuroprosthesis for the
Blind) consortium has also implemented a
bioinspired retinal processing model as part of a
system designed to transform the visual world in
front of a blind individual into multiple electrical
signals that could be used to stimulate, in real time,
the neurons at his/her visual cortex (Cortivis, 2002;
Romero, 2005).
Video
input
Temporal
filtering
Spatial
filtering
Stereo
processing
Linear
combination
Automatic
synthesis
Receptive field
mapping
Perceptual
image
Neuromorphic
coding
Activity
matrix
Visualization
& analysis
‘Graded
output'
Neuro-stimulation Configuration
Acoustic
signal
generation
Video
input
Temporal
filtering
Spatial
filtering
Stereo
processing
Linear
combination
Automatic
synthesis
Receptive field
mapping
Perceptual
image
Neuromorphic
coding
Activity
matrix
Visualization
& analysis
‘Graded
output'
Neuro-stimulation Configuration
Acoustic
signal
generation
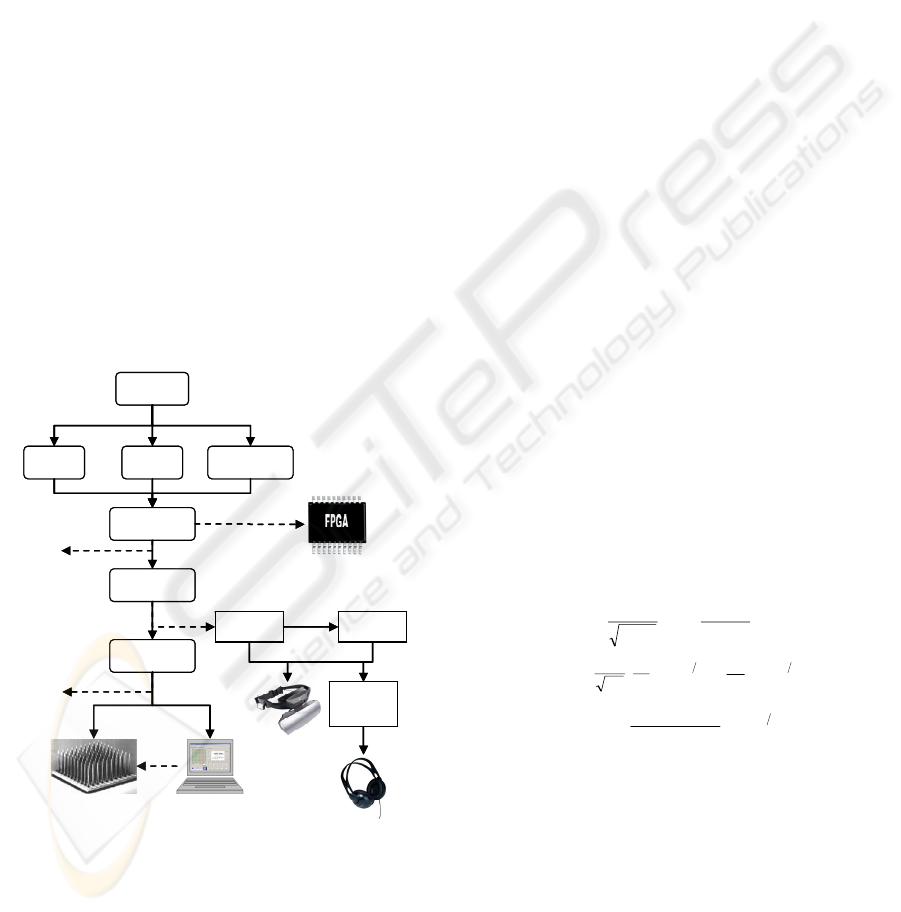
Figure 1: Reference architecture of the bioinspired image
processing system for the development of visual aids.
After obtaining a linear combination of spatial, temporal
and depth-related features, different outputs for a variety
of applications are possible. The choices include automatic
synthesis for programmable devices; sending the
information to the patient by means of HMD, headphones
for acoustic signalling, or delivering neurostimulation to
the neural tissue to evoke visual perceptions.
Even though the main objective of the
CORTIVIS project, in which our research group has
been involved, was the design of a complete system
for neurostimulation, a part of the system is useful as
a processing scheme which can be adapted to match
the requirements aforementioned, and, this way,
develop non-invasive aids for visualization, or
sensorial transduction to translate visual information
into sound patterns.
Figure 1 shows the reference architecture
illustrating all the capabilities developed up to this
moment. The input video signal is processed in
parallel by three modules for the extraction or
enhancing of image features, according to different
processing modes. The first module performs a
temporal filtering, as natural retinae also respond
and remark temporal changes in the visual input; see
for example (Victor, 1999). In our platform this
temporal enhancement is implemented by remarking
the differences between two or more consecutive
frames, and with different strength in the periphery
of the visual field (foveated model) as in natural
retinae (Morillas, 2007).
For the spatial processing, an intensity and
colour-contrast filtering is applied to different
combinations of the three colour planes (red, green
and blue) composing a frame. This spatial filtering
emulates the function of bipolar cells in the retina, in
the form of difference of Gaussians filters.
Our platform offers a variety of bioinspired
predefined and parameterized filters, including
Gaussians (1), difference of Gaussians (2) and
laplacian of Gaussians (3). Even more, we can
include new filters in the form of any Matlab
(Mathworks, 2007) expression over the colour or
intensity channels.
()
⎥
⎦
⎤
⎢
⎣
⎡
+
−=
2
1
22
2
1
1
2
exp
2
1
,
σ
πσ
σ
yx
yxG
(1)
() ()
⎥
⎦
⎤
⎢
⎣
⎡
−=−=
+−+−
2
2
222
1
22
2
2
2
1
21
11
2
1
σσ
σσ
σσ
π
yxyx
eeGGDoG
(2)
()
()
222
2
4
222
2
,
σ
σ
σ
σ
yx
e
yx
yxGLoG
+−
−+
=Δ=
(3)
The stereo processing module obtains disparity
maps at different resolutions, starting from image
pairs captured by two head mounted cameras. Figure
2 shows examples of application where disparity
maps are used as a weighting term for the output of a
spatio-temporal filtering combination, emphasizing
closer objects which produce a higher activity levels.
The next stage in figure 1 gathers the results
obtained by each of the processing modalities. Its
objective is to integrate as much information as
possible into a single compact representation, so it
requires a maximum degree of compression to allow
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
64

the integration of the most relevant features. Given a
real scene, we intend to remove all the background
content, so only the closest objects are remarked,
which are considered to be the most relevant
information for an application like the one described
in this paper, conceived for basic visual exploration
tasks and obstacle-avoidance navigation. After some
initial experiments with a portable prototype, we
considered the need for incorporating an ultrasonic
range finder, which provides a measurement of the
distance to the closest object that can be used to
ponderate the output of later stages, based on
proximity.
According to the kind of application, the
resolution for the output will be different; however,
we can consider a general reduction of the
resolution. For a neuroprosthesis, this resolution will
match the number of available electrodes in the
physical interface, which is currently in the order of
hundreds of channels (Fernández, 2005). If we apply
this scheme for a sensorial transduction system for
the translation of visual information into audible
patterns, we will be restricted by the amount of
different sounds that the patient is able to distinguish
without interfere his/her normal perception
capabilities.
The reduction of spatial resolution is based on
the concept of receptive field, which can be defined
as a zone of the image (set of pixels) that contribute
to the calculation of the value resulting in the
reduced representation, which we call “activity
matrix”.
The default configuration performs a partition of
the image into rectangular non-overlapping areas of
equal size, however we have also developed a tool
for the definition of more complex structures,
allowing even different sizes and shapes, which also
can be variable, depending on its localization, from
the centre of the visual field to its periphery.
Once the system has computed the activity
matrix, depending on the specific application we
will use it in a different way. In the case of a
neuroprosthesis, the next stage is the recoding of this
information into a neuromorphic representation, as a
sequence of stimulation events (spikes), which will
be later used to drive a clinical stimulator. Another
possible use is the display of this information by
means of specialized portable screens as HMD
(Head Mounted Displays), to assist low-vision
patients suffering a visual deficiency but still
holding a functional remain of his/her vision.
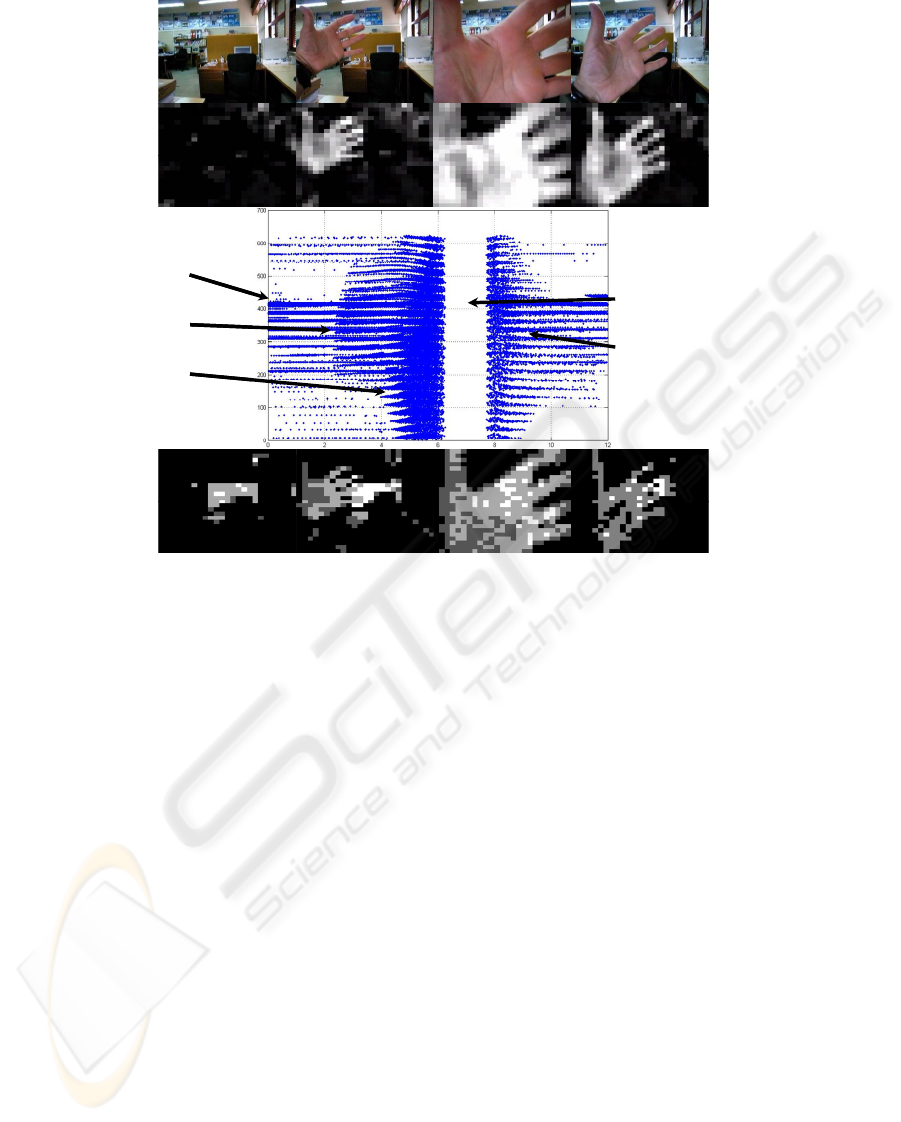
Figure 2: Stereo processing results obtained with the hardware implementation described in section 5. (a) Left and right
images from the stereo cameras. (b) Activity matrices for a combination of spatial filters on the left input (left), right input
(centre) and disparity weighting (right), the door is detected as relevant for spatial filters, but the chair, that is closer, is
enhanced by the disparity computation. (c) A new closer object (the hand) appears in the visual field. (d) The disparity filter
(on the right) detects this new object as the most relevant, due to its higher activity at the output matrix. The disparity output
image is referred to the filtered left image in all cases.
BIO-INSPIRED IMAGE PROCESSING FOR VISION AIDS
65
The information provided by the activity matrix
has been also employed in our system to locate the
most relevant zones of the scene and translate them
into sound patterns that include 3D spatial
information. This way, the system can point out the
location of the highest activity levels in the scene for
the patient.
3 NEUROMORPHIC ENCODING
Features extracted by the image processing stage can
be used in a complete neural stimulation system,
being transformed by a spiking neuron model that is
able to translate numerical activity levels into spike
trains that the stimulation device can handle.
Different neuron models can be found in the
literature (Gerstner, 2002), and we decided to
implement an integrate-and-fire spiking neuron
model, including a leakage factor, because of the
simplicity to be implemented in a discrete system.
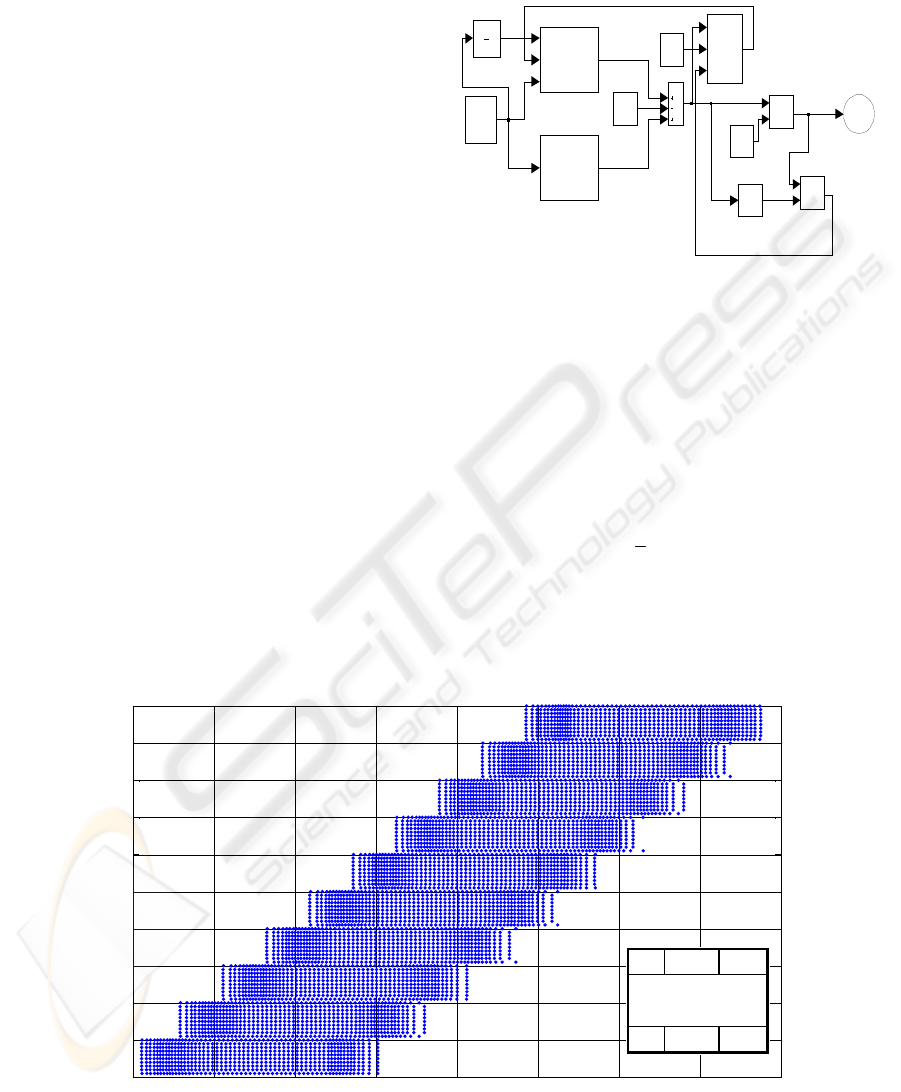
The selected spiking neuron model, depicted in
figure 3, needs a set of accumulators which gather
activity levels resulting of the current frame
processing. When a value is integrated, the result is
compared to a previously defined threshold, and if
reached, the accumulator is initialized and a spike
event is raised. The leakage factor avoids
unexpected events due to ambient noise or residual
activity from previously processed frames.
Each spike event generated is delivered to the
stimulation device which has to form the
corresponding electric waveform to be applied to the
neural tissue.
spikes
Zero
0
Unit Delay
z
1
Threshold
u
MUX
s0
s1
selec
out
Logical
Operator
OR
Lekage
factor
k
Compare
To Zero
< 0
Comparator
>=
Address
generator
addr
Activity
matrix
memory
addr_R
data_R
Activity
accumulators
memory
addr_W
data_W
addr_R
data_R
spikes
Figure 3: Block diagram of the neuromorphic coding
subsystem for a sequential implementation.
All the events generated during a stimulation
session can be stored for analysis. Figure 4 shows a
graphic representation of all the events produced by
a white horizontal bar moving from bottom to top on
a black background, considering a 10 by 10 channels
stimulation device. In this example the retina
function is approximated by a simple model
described by the expression (4):
temp
FIretina +⋅=
5
1
(4)
where I is the input pixel intensity and the temporal
filter F
temp
compares, for each pixel, the current
intensity value with the average of the five previous
frames.
0 2 4 6 8 10 12 14 1
6
0
10
20
30
40
50
60
70
80
90
100
Electrode number
time
0 2 4 6 8 10 12 14 1
6
0
10
20
30
40
50
60
70
80
90
100
Electrode number
time
Figure 4: Spike event trains produced by a horizontal bar pattern moving from bottom to top of the image, and illustration
of stimulation channels numbering (see text for details).
10…1
…
100…91
10…1
…
100…91
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
66
(1)
(2)
Hand appears
(3)
Hand approaches
(4)
Camera
occlusion
(during two
seconds)
(5)
Hand goes
away
(1) (2) (3) (5)
(1)
(2)
Hand appears
(3)
Hand approaches
(4)
Camera
occlusion
(during two
seconds)
(5)
Hand goes
away
(1) (2) (3) (5)
Figure 5: Image processing and coding example, including the inverse activity restoration stage. First row shows four
instants of a video sequence. In the second row we can see the corresponding activity matrix obtained with a certain spatial
filtering combination. Graphics shows the representation of the spike events produced by the image sequence, and finally,
the bottom row represents the reconstruction of each activity matrix.
In order to test the effectiveness of this
information coding method, we have developed a
procedure for restoring activity matrix values from
the temporal sequence of spike events (i.e. an
inverse spike to activity conversion). Each spike
produces an increment of the accumulated value of
the corresponding activity matrix component, while
a leakage factor is applied every simulation time
step. A visual comparison between original and
restored activity matrices was done, reporting
successful results. However, a better evaluation
method was implemented. Restored activity matrix
was applied again to the neuromorphic pulse coding
stage, producing very precise results with almost
imperceptible differences. Results obtained from the
restoring stage are illustrated in figure 5
4 GENERATION OF ACOUSTIC
SIGNALS
As we have mentioned above, an object detected by
the image processing stage can be encoded by a
sound that will represent the position in which it has
been detected (see figure 1).
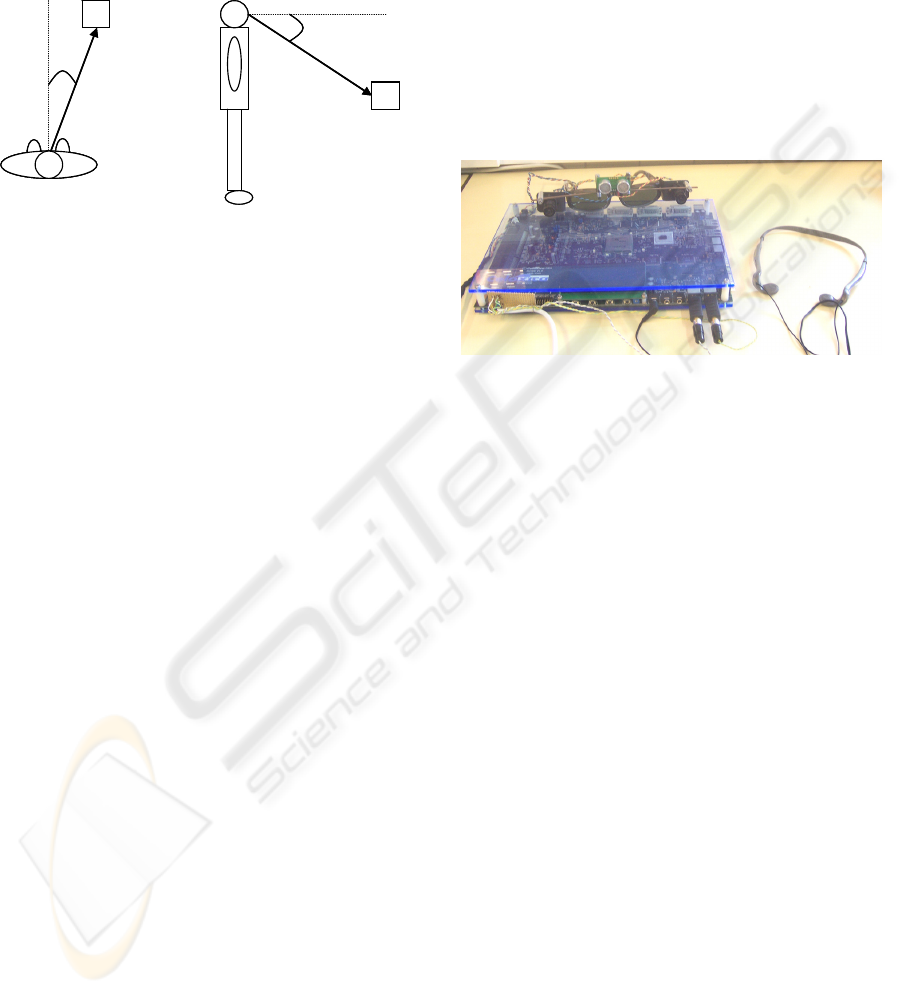
We will represent the position of an element in
the visual space by means of a sound pattern coming
(apparently) from the actual spatial location of that
element. This location is determined by three
parameters (see figure 6): straight-line distance
between the observer and the object, d, elevation of
the object over the horizontal plane containing the
head, e, and azimuth or horizontal angle between the
front and the sides of the head, a.
The mechanism of spatial sound location carried
out by the binaural biological system is highly
dependent on the individual, making difficult the set
up of an artificial system for universal filtering
(Algazi, 2001). As a first approach, we have made
use of the results obtained by (Gardner, 1994) in
order to create sounds including spatial localization
BIO-INSPIRED IMAGE PROCESSING FOR VISION AIDS
67
information. In their study, they placed a KEMAR
(Knowles Electronics Manikin for Acoustic
Research) model inside a soundproof cabin. Then,
the authors played pseudo-random sound stimuli,
and measured the response at the input of each of the
pinnae.
(a) (b)
d
e
a
d
(a) (b)
d
e
a
d
Figure 6: Basic parameters for the 3D location of sounds.
See text for more details.
This way, they obtained an ample set of
measurements of the HRTF (Head-Related Transfer
Functions) which model the physical and
mechanical features of the head acoustic system.
These functions are described as a set of multiple
pairs of coefficient sets of a FIR filter, one for each
spatial location and auditory channel.
This technique is expressed in (5):
() () ( )
∑
=
−=
N
i
itxihty
1
·
(5)
where h is the set of coefficients of the FIR filter, x
represents the samples of base sound to which we
want to add spatial information, and y is the
resulting sound.
5 REAL-TIME HARDWARE
IMPLEMENTATION
This section describes the implementation of our
system into a programmable circuit. This choice is
based on the customization needs of the application.
The kind of processing to be carried out depends
strongly on the specific features of the disability of
the patient, which also can vary with the evolution
of the illness, so the system requires being able to
adapt its configuration to those changes.
Furthermore, the systems that are based on
reconfigurable logic chips (FPGA) present some
other features that make them suitable for this field
of development, as the short time required to obtain
a working prototype, its small size, allowing for
portability and the integration of some other
interfacing circuitry.
The description of the different modules has
been written in Handel-C language, from (Celoxica,
2007), within its DK synthesis environment.
The prototyping platform selected for our tests is
the Celoxica’s RC300 board, which incorporates a 6
million gates FPGA and all the peripherals required
for our application, as a dual video capture system to
grab input images for each visual channel, VGA
video outputs, and specific circuitry to obtain stereo
audio. Figure 7 shows the experimental setup based
on the RC300.
Figure 7: Experimental hardware prototype composed by
two cameras, an ultrasonic range finder, headphones and a
RC300 board.
This kind of devices let us implement a high
degree of parallelism, so that most of the modules
can process in parallel. The design has been made to
exploit this capability, and a pipelined architecture
has been implemented, with a high number of stages
that operate concurrently.
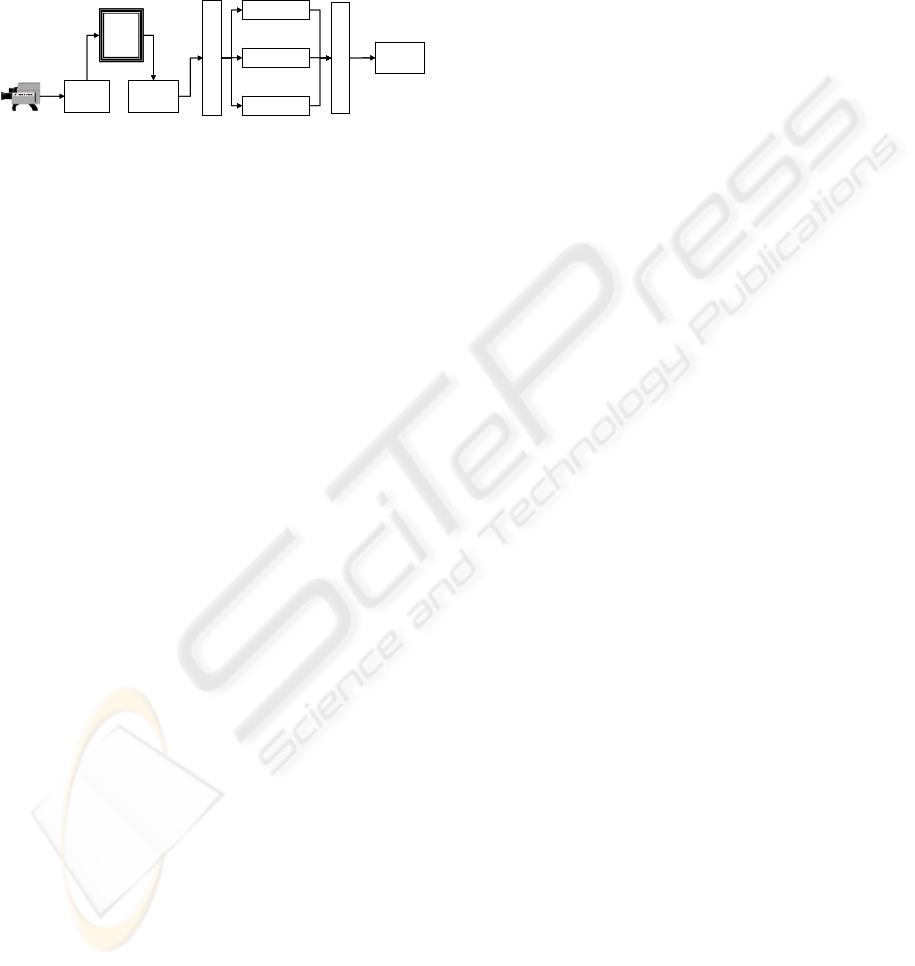
Figure 8 shows the schematic organization of the
building blocks for the image processing subsystem.
The combination of an image grabbing process
to store the frame, and another process to read this
information feeds constantly the computational
pipeline, and achieves an uncoupling between the
image capture rate and the processing carried out by
the rest of the system. The information read from
the memory banks is delivered to the spatial filtering
module, which performs the convolution over the
input images with different masks. The outputs from
this stage are put together by a weighting module.
The results obtained with this module will be used to
perform the receptive field based mapping, in which
the mean value of all the pixels in the contributing
zone is stored for every point of the activity matrix.
Once the activity levels are computed for every
zone of the image, the maximum values are
identified, as they indicate the presence of the most
relevant objects in the scene, which need to be
reported to the patient. The user can select the
amount of information that he/she is receiving
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
68
through this system by varying the number of
different zones (K) of the image that he/she prefers
to be reported about. This means that we will
generate K audible patterns, modulating each of
them to include information regarding the location
of the image from which it has been extracted, so the
patient can perceive their origin.
Image
capture
RAM
Buffers management
Filter #1
Filter #2
Filter #M
Linear combination
Image
reading
RF
mapping
…
Image
capture
RAM
Buffers management
Filter #1
Filter #2
Filter #M
Linear combination
Image
reading
RF
mapping
…
Figure 8: Architecture for the implementation of the image
processing system in a Celoxica RC300 Board. The output
of this common sub-system can be used for sensorial
transduction, low-vision enhancing, or neurostimulation,
as depicted in figure 1.
Although the working frequency for the global
system is not very high, about 40 MHz, the
performance-oriented design architecture allows
reaching a 60 fps rate of processing, more than
enough to consider the system is working in real
time.
6 CONCLUSIONS
Image processing is a key stage for any device
conceived to provide an aid to visually-impaired
persons. We present a system that incorporates a
bioinspired vision preprocessing stage which selects
the most relevant objects in a visual scene to
perform later processing that can be applied to
different impairments. When this later translation is
encoded into a stream of events for electrode
addresses, the system can be applied for a visual
neuroprosthesis. If we perform a sensorial
transduction, the results can be translated into sound
patterns, providing 3D binaural information related
to the location of obstacles in the visual field. In any
case, the system is highly flexible and parametric,
and can be synthesized to fit into a portable,
restricted power consumption board, which is
suitable for a wearable aid. Our system is able, as
described, of integrating different aspects of the
image, as depth, colour and luminance contrast, and
temporal changes detection.
We show some results on how the image analysis
is performed for a variety of tuneable aspects, and
specific data related to the synthesis of the
processing scheme on a FPGA.
ACKNOWLEDGEMENTS
This work has been supported by the National
Spanish Grants DPI-2004-07032 and IMSERSO-
150/06, and by the Junta de Andalucía Project: P06-
TIC-02007.
REFERENCES
Algazi, V.R., Duda, R.O., Thompson, D.M., Avedano, C.,
2001. ‘The CIPIC HRTF Database’, 2001 IEEE
Workshop on the Applications of Signal Processing to
Audio and Acoustics, pp. 99-102.
Celoxica. http://www.celoxica.com [2007].
Cortivis website. http://cortivis.umh.es [2002].
Eckmiller, R., Hünermann, R., Becker, M., 1999.
Exploration of a dialog-based tunable retina encoder
for retina implants. Neurocomputing 26-27: 1005-
1011.
Fernández, E., Pelayo, F., Romero, S., Bongard, M.,
Marin, C., Alfaro, A., Merabet, L., 2005. Development
of a cortical visual neuroprosthesis for the blind: the
relevance of neuroplasticity. J. Neural Eng. 2: R1–
R12.
Gardner, B., Martin, K., 1994. HRTF Measurements of a
KEMAR Dummy-Head Microphone, Media Lab
Perceptual Computing Technical Report #280.
Gerstner, W. and Kistler, W., 2002. Spiking Neuron
Models, Cambridge: Cambridge University Press.
JORDY, Enhanced Vision. [2007].
http://www.enhancedvision.com
Koch, C., Torre, V. and Poggio, T., 1986. Computations in
the vertebrate retina: motion discrimination, gain
enhancement and differentiation. Trends in
Neuroscience 9: 204-211.
LVES, University John Hopkins, Baltimore in
collaboration with NASA. [1994]
http://www.hopkinsmedicine.org/press/1994/JUNE/199421.HTM
Mathworks website, The. [2007]
http://www.mathworks.com.
Morillas, C., Romero, S., Martínez, A., Pelayo, F.,
Reyneri, L., Bongard M., Fernández, E., 2007. A
Neuroengineering suite of Computational Tools for
Visual Prostheses. Neurocomputing 70(16-18): 2817-
2827.
Romero, S., Morillas, C., Martínez, A., Pelayo, F.,
Fernández, E., 2005. A Research Platform for Visual
Neuroprostheses. In SICO 2005, Simposio de
Inteligencia Computacional, pp. 357-362.
Victor, J., 1999. Temporal aspects of neural coding in the
retina and lateral geniculate. Network 10(4): 1-66.
BIO-INSPIRED IMAGE PROCESSING FOR VISION AIDS
69
