
SYNCHRONIZATION ISSUES IN SURGICAL TRAINING
Álvaro Marco, Héctor Gracia, Ángel Asensio, Carlos Guallart
José Ignacio Artigas and Roberto Casas
Instituto de Investigación e Ingeniería de Aragón (TecnoDiscap group), Universidad de Zaragoza
María de Luna 1, Zaragoza, España
Keywords: Synchronization, Training systems, Wireless sensor networks, Video.
Abstract: Surgical training systems allow novel surgeons to acquire the required skills to successfully carry out an
operation without harming a real patient. These systems emulate the situation of a real operation, replicating
the information gathered by sensors, movements of the surgeon, patient response, etc. All this information
must be synchronized to provide an experience to the novel surgeon as closest to reality as possible. A
special case of information synchronization is when using video images from the operation. In this paper,
we analyze these synchronization issues —video, movements, sensors, etc. — and show a particular case
that bring all together: an endoscopic video-surgery learning system.
1 INTRODUCTION
Endoscopy or tele-surgery, are medicine techniques
that require a special skill from surgeons, as they
have not a direct vision of what they are doing.
Learning these techniques is supported by training
systems that allow the surgeon to acquire the
required skills to successfully carry out an operation
without harming a patient.
(Ballaro et al. 1999) propound a training system
where the surgeon manipulates synthetic images of a
prostate. (Gomes et al. 1999) and (Kumar et al.
2002) improve it by providing a tactile feedback of
the manipulation with an artificial prostate. (Chen
and Marcus, 1998) offers also a feedback with an
adapted resectoscope, analyzing the anatomic tissues
virtually touched and generating the opposing force.
To properly emulate real situations where the
surgeon can be involved, it is necessary to collect a
lot of data from different sensors in real operations.
Besides that, surgical training is often supported by
use of pre-recorded video images (Gambadauro and
Magos, 2007).
Although most of training systems offering
haptic feedback use virtual simulations instead of
real video, augmented reality systems combining
these videos with graphics images systems provide a
better simulation environment (Botden et al. 2007).
Real videos can be used for training with motorized
mock-ups driving surgeon’s hands while playing
video-images of the operation, reproducing the
movements displayed in the video. Obviously, it is
needed that the information used to drive them to a
position is synchronized with the related frames of
the video.
In this paper, we discuss some synchronization
issues we have faced during the development of a
video-surgery learning utility, which implements
also a wireless-synchronization between classroom
workbenches.
Next section outlines the learning utility and its
synchronization issues, which are discussed in
sections three and four. Section five details
synchronization integration in the classroom and its
operation, and finally, conclusions are presented.
2 VIDEO-SURGERY LEARNING
TOOL
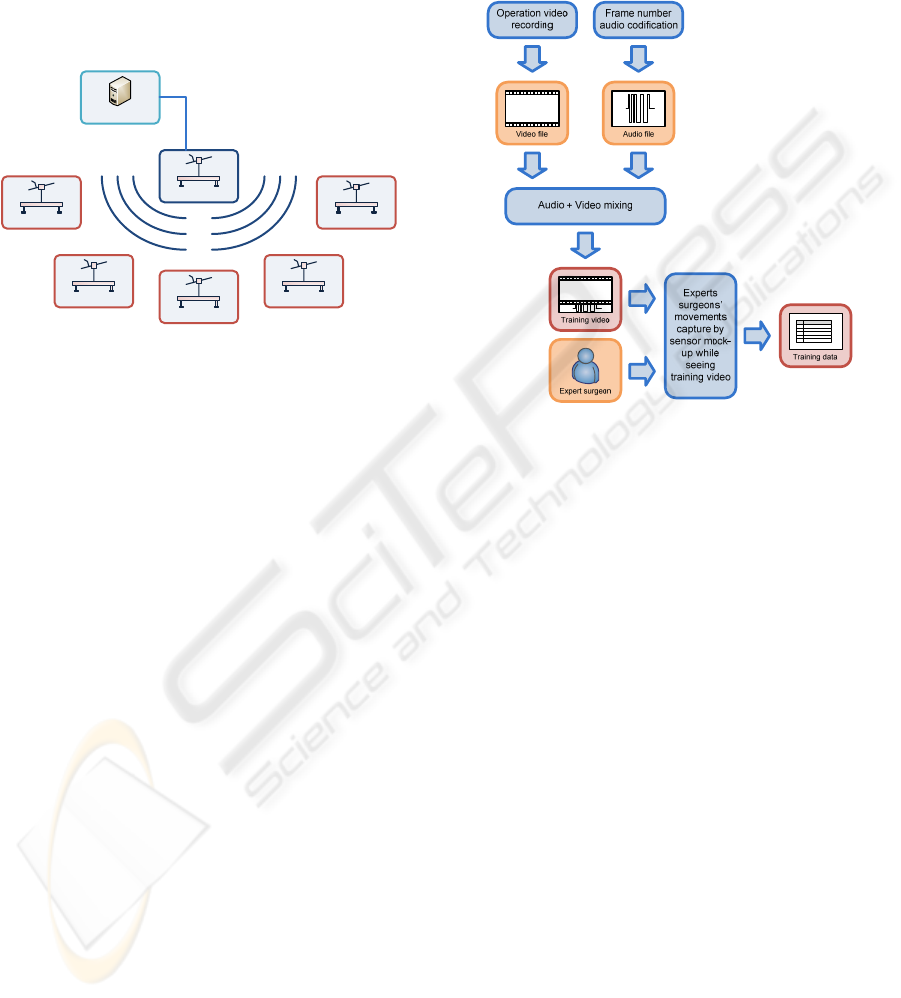
Our application consists on a classroom for training
surgeons on prostatic surgery, whose system layout
is presented in figure 1, and consists of several
mock-ups. All the mock-ups are wireless connected,
which allows an easy deployment and configuration
of the classroom.
82
Marco Á., Gracia H., Asensio Á., Guallart C., Ignacio Artigas J. and Casas R. (2008).
SYNCHRONIZATION ISSUES IN SURGICAL TRAINING.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 82-86
DOI: 10.5220/0001052000820086
Copyright
c
SciTePress
One of them —master—, includes a motion
monitoring system which extracts all the movements
the instructor surgeon makes; this one is called
sensing mock-up. The others —slaves—, transmit
these previously recorded movements to the practice
surgeon so he can first learn the instructor
movements and, after that, be evaluated by
comparing his movements with the ones made by
the instructor; this ones are called motor mock-up.
Master mock-up
Bluetooth
Management PC
Slave mock-up
Slave mock-up
Slave mock-upSlave mock-up
Slave mock-up
Figure 1: Video-surgery classroom. Master mock-up is
video-synchronized and slave mock-ups are wireless-
synchronized.
In order to get a real-like feedback, a big video
display is used. At this moment, it seems clear there
is heavy need of synchronization for this system, so
video and captured instructor movements are
correctly recorded and, this way, the learning and
evaluation processes are synchronized with the
video displayed.
It is also necessary to propagate this
synchronization through the different motor mock-
ups so all of them reproduce the movements at the
same time the action is being taken at the video they
see.
In short, we can group synchronization in two
terms:
a) Video-synchronization, between the pre-
recorded images and the surgeon’s
movements.
b) Wireless-synchronization between the mock-
ups.
In the next sections, these synchronization issues
are discussed in deep.
3 VIDEO SYNCHRONIZATION
In this case, a little misalignment between images
and movement —below several milliseconds— is
admissible, but playing must be fluid and without
cuts that will hinder learning. If the training system
core runs in a PC, a possibility for synchronizing
surgeon’s movements with video is to play the video
in the PC, and to stream the movement information
to the mock-up —through a serial port, by
TCP/IP…—, but common multi-task Operating
Systems (OS) can lead to cuts or undesired delays,
so a real-time OS will be needed to do that.
Figure 2: Block diagram for video synchronization. Expert
surgeon’s movements are captured and time-stamped with
the corresponding frame number of the operation video.
To properly synchronize the video and the data, we
decide to integrate the data directly into the video
stream. AVI file formats allow integrating multiple
streams into the same file (e.g. the video, audio,
subtitles, chapters… of a movie). A possibility is to
integrate a data stream with the movement
information like a “subtitle”, but we need also to
extract that information and to stream it to the mock-
ups, outside the PC, which can lead to an
“asynchronous playing”. The easiest way to avoid
that is recurring to the audio channel. Audio is send
by the OS to the sound card, and is synchronized
with the video, so if we code our data in the audio
track, the mock-ups can listen to the sound card and
get the data synchronously with the video.
Moreover, we could record the file in a DVD and
play the video on a DVD player without the need of
a PC.
In addition to that, there is another big issue
about how to compound the operation information
and the video images to get a synchronized training
data set. If all the information of the operation is
obtained “online”, while the operation is carried out,
as all the sensors must be synchronized, the training
data set can be generated directly.
However, if the information related to the
surgeon’s movements cannot be real-time acquired,
SYNCHRONIZATION ISSUES IN SURGICAL TRAINING
83
an offline synchronization is required. The way to do
this is that an experimented surgeon, while seeing
the video images, replicates the movements over a
sensor mock-up. That mock-up captures the
movement information, and synchronizes it with the
video.
Again, streaming the movement data to or from a
PC can lead to a bad synchronization. The ideal
solution would be to directly record the movement
data on the audio track of the video, but this is not
trivial. Fortunately, there is an easiest method.
Strictly, we don’t need to extract the data directly
from the video, and it’s enough by knowing the
timestamp of the video, or the frame number.
For the movement data capture, we have coded
the frame number of the video in the audio track,
and the sensor mock-up listen to the video the expert
surgeon is viewing. When the capture starts, the
surgeon reproduces the movements displayed on the
operation, and the mock-up store them together with
the frame numbers listened. This way, we obtain a
training data set where each frame of the video has
synchronized information relative to the movements
of the expert surgeon.
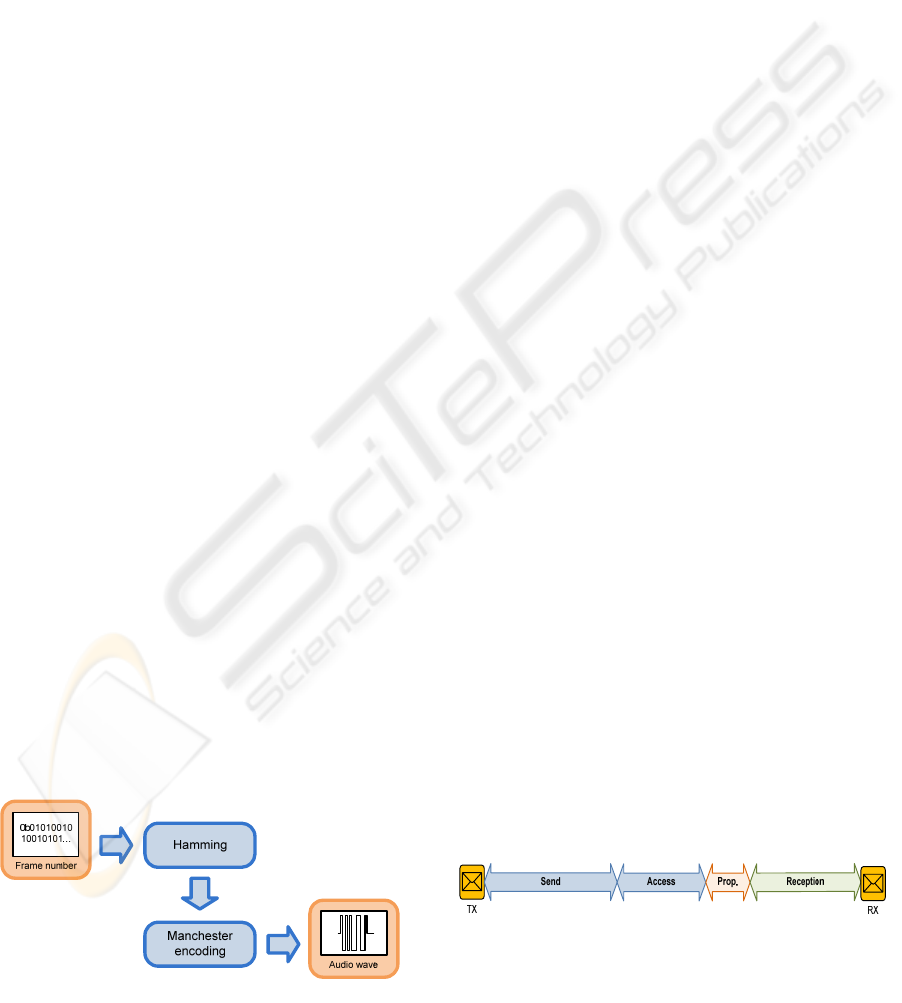
3.1 Frame Number Codification
To code the frame number into the audio track, we
have generated an audio wave with a Manchester
code, suitable for binary data transmissions. The
data rate will be constrained by the audio
characteristics and the sound card hardware. With a
sampling frequency of 44.100 Hz, and using two
samples to codify each bit (one sample for both high
and low part of the wave), will give us a maximum
data rate of 22.050 bps, but resulting sound wave
cannot be correctly played by every sound card. A
safer ratio of six samples per bit allows 7.350 bps,
enough to codify more than 200 frame numbers per
second with 32 bits resolution.
Frame number codes must be placed in the audio
wave at the exact moment the frame is displayed in
the video, which can be easily done with any video
editing tool. To prevent errors when decoding the
audio wave, a hamming code of distance three is
also applied to the frame number.
Figure 3: Frame number codification.
4 WIRELESS COMMUNICATION
AND SYNCHRONIZATION
Once we have established synchronization between
video and movements on the master mock-up, this
synchronization must be propagated to the slave
mock-ups, so we need that they are wireless
synchronized. Every mock-up calculates its local
time basing on its own oscillator, and these timings
tend to diverge one from another. This is caused by
the lack of precision on their oscillators, as there can
be errors from 20 ppm to 100 ppm. The more time
they keep running their clocks free, the bigger the
misalignment will be.
This is a familiar matter on wireless sensor
networks. Creating a common temporal reference
using wireless communication capabilities has been
widely studied keeping in mind the energy, cost and
size limitations of the devices used in wireless
sensor networks (Sivrikaya and Yener, 2004). The
regular clock corrections needed to keep wireless
networks synchronized are usually performed by
exchanging reference messages time-stamped with
the reference time. The more accurate that
timestamp is the higher accuracy the
synchronization achieves. Some protocols that
achieve high synchronization accuracy with a
reduced traffic load are the TMSP —Timing-sync
Protocol for Sensor Networks— (Ganeriwal et al.,
2003) or the FTSP —Flooding Time
Synchronization Protocol— (Maróti et al., 2004).
Their main advantage is that they can gain access to
the MAC layer, so they can precisely timestamp
messages when they pass through the lower layers.
According to the time-analysis performed by
Maróti et al, the most problematic delays when
transmitting messages over a wireless link are those
from the send, receive and access processes (see
figure 4). Besides bigger than propagation time, they
are not deterministic, so they have a big influence on
synchronization accuracy.
This way, methods which can access to MAC layer
and precisely timestamp messages, such as TMSP or
FTSP, can achieve a high accuracy. However, the
use of standard wireless hardware such as ZigBee or
Bluetooth —as in our case— to ease deployment,
block access to lower layers, preventing from a
precise timestamp.
Figure 4: Times on sending, accessing, propagating and
receiving reference messages. Propagation time is
negligible versus send, access or reception times.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
84
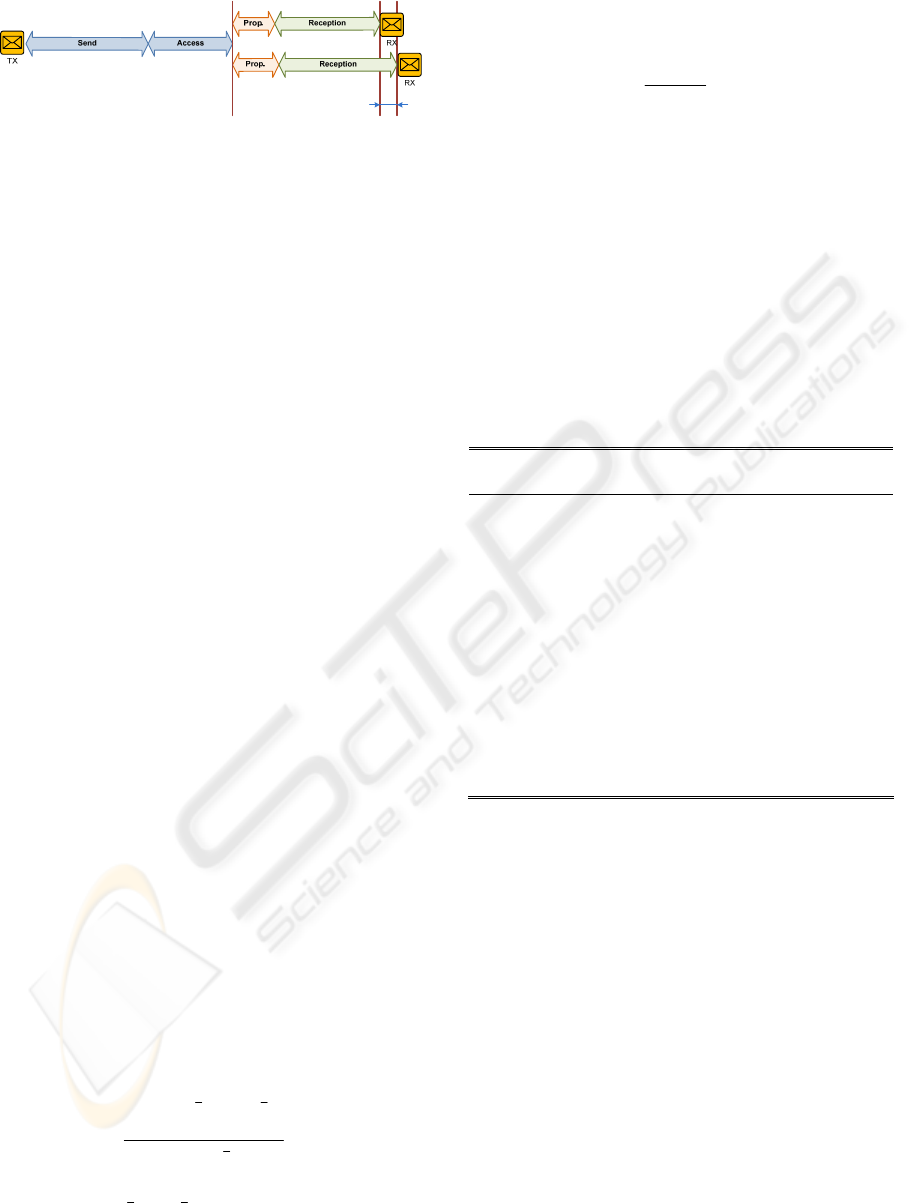
Figure 5: Misalignment on reception time. The non
deterministic times on the sender side are eliminated.
In order to reduce as much as possible the
uncertainties in this process, a receiver-receiver
synchronization scheme is used. There is a common
time reference for every member of the network,
which is propagated through all the mock-ups using
a broadcast message sent by the network coordinator
(whose local hour is taken as the global time). After
that, each mock-up receives this global hour and
thus, can correct its own clock with the just received
information.
With this receiver-receiver message
synchronization method, medium access time
variation is avoided (fig.5), so the biggest part of the
non-deterministic error is eliminated. This method
compares the local hours when the master mock-up
and the different slaves receive the same message, so
they can refer their local time to the master global
time and hence, correct it. This is possible, because
the uncertainty associated with the time involved in
sending the message affects the same way both
receivers, and so, doesn’t have influence on the
overall timing error. The propagation can be
assumed as equal for the two nodes (because the
distance is not significant enough to cause a
measurable time difference in the propagation of a
radio signal).
Thus, synchronize the clock of the mock-up i
implies estimate and compensate its clock skew s
i
and offset k
i
. The most used procedure to perform
these adjustments is broadly described in literature
(Sivrikaya et al. 2004, Maróti et al. 2004, Elson et al.
2002, Cox et al. 2005). There is a reference clock
which all the mock-ups will be synchronized to (t
r
).
A sync-point is defined as a pair of timestamps
collected at the same time t
k
in the reference node
and in the node that want to be synchronized: {t
i
k
,
t
r
k
}. Once each mock-up stores several sync-points
at different instants, the offset (k
i
*) and slope (s
i
*)
differences with the reference are calculated using
linear regression:
(
)
(
)
()
.
,
**
2
*
riii
k
r
k
r
k
i
k
ir
k
r
i
tstk
tt
tttt
s
−=
−
−−
=
∑
∑
(1)
This way, every node can estimate the global time
(tr*) from its local clock:
.
*
*
*
i
ii
r
s
kt
t
−
=
(2)
Table 1 shows the results obtained when using
the below described process to correct local times
using Bluetooth and ZigBee technologies compared
to other synchronization methods.
By these resynchronizations, clocks can be kept
with a misalignment considerably lower than the
precision required to cover our timing correction
goals. The response time of the mock-up kinematics
is considerably bigger than 1 ms, so achieving this
misalignment between the different mock-up clocks
is more than enough for this application.
Table 1: Misalignment on reception time. Results obtained
by using different synchronization methods.
Sync Method Average
Worst
case
Sender – Receiver
Zigbee (Motes-2.4GHz)
[Cox 2005]
14.9 μs 61.0 μs
TPSN (Motes-916MHz)
[Ganeriwal 2003]
16.9 μs 44.0 μs
FTSP (Motes-433MHz)
[Maróti 2004]
1.4 μs 4.2 μs
Receiver – Receiver
RBS (Motes)
[Elson 2002]
29.1 μs 93.0 μs
RBS (Bluetooth) 4.5 μs 18.0 μs
RBS (ZigBee) 22.2 μs 52.0 μs
5 CLASSROOM INTEGRATION
Once we know how to perform video-
synchronization and wireless-synchronization, it is
time to integrate them into the classroom. In the
layout shown in figure 1, the sensor mock-up —
master— is connected to the PC, which controls
video playing. The mock-ups form a Bluetooth
piconet that allows communicate them and keep
them synchronized with an absolute error below 1
millisecond, small enough for the classroom
requirements.
For synchronizing the data with the video, we
have generated an audio file in Matlab, containing a
frame number every 10 milliseconds, and mixed it
with the video containing the images of the
operation for training. In the configuration of the
mock-ups, it is possible to set an amount of frame
SYNCHRONIZATION ISSUES IN SURGICAL TRAINING
85

numbers to drop out when decoding audio, reducing
the effective frame rate.
There are two basic operating modes: capture
and playing. Combinations of them allow recording
movements of the expert surgeon and reproducing
them for training the novel surgeon, capturing
movements of the novel surgeon for evaluating,
guiding, etc.
In the capture mode, the surgeon reproduces the
movements related to the video sequence. The
sensor mock-up receives the audio in the training
video, and decodes the frame numbers, which are
periodically distributed. When a frame number is
decoded, the mock-up captures the values of the
position encoders and stores them together with the
frame number. When the capture ends, the mock-up
sends the data to the PC, where can be saved as the
training data file related to the video, or be evaluated
with a previously stored data.
In the playing mode, all the motor mock-ups
previously store the training data, and wait for the
start command from the sensor mock-up. When the
PC starts video, the sensor mock-up decode the first
frame number, and timestamp it with the global
hour. Then, it broadcasts that information to the
motor mock-ups, which can compute the timestamp
for the next frames, and synchronize playing.
The sensor mock-up periodically broadcast
frame-time pairs for prevent errors, and when there
is an unexpected value in the frame number
sequence, which means a change in the video
playing (pausing the video for an explanation,
advance the video, looping some technique… etc.).
6 CONCLUSIONS
In this paper we have discussed two different
synchronization issues we have faced during the
development of a video-surgery learning utility.
Video synchronization was performed by a cost
effective and simple method recurring to the audio
channel. It allows accurate synchronization without
the need of a complex system. Even it is possible to
eliminate a PC by using a dedicated video player and
controlling playing from the sensor mock-up.
Wireless synchronization between mock-ups was
also analyzed using a similar criterion of wireless
sensors networks. We use a synchronization protocol
over Bluetooth (we also tested ZigBee with similar
results) that largely achieves our requirements. The
method avoids accessing the lower layers of the
protocol while performing similar accuracy as others
that use the MAC layer.
With the strategies described in this article, we
conclude in a surgical training classroom in which
images displayed will be correctly synchronized
with the sensor information and the mock-up
movements, so the novel surgeons can acquire the
needed skills in a real-like environment without
harming any patient. This is obtained at low cost by
using off-the-shelf components to build up this
surgical classroom.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Spanish Ministry of Science and Technology under
CICYT project numbers TIC2003-07766 and
TIN2006-15617-C03-02.
REFERENCES
Ballaro, A., et al., 1999. A computer generated interactive
transurethral prostatic resection simulator. In Journal
of Urology, 162 (5), pp. 1633-1635.
Gomes, M.P.S.F., et al., 1999. A computer-assisted
training/monitoring system for TURP structure and
design. In IEEE Trans. Information Technology in
Biomedicine, 3 (4), pp. 242-251.
Kumar, P.V.S., et al., 2002. A computer assisted surgical
trainer for transurethral resection of the prostate. In
Journal of Urology, 168 (5), pp. 2111-2114.
Chen, E., Marcus, B., 1998. Force feedback for surgical
simulation. In Proceedings of the IEEE, pp. 524-530.
Gambadauro, P., Magos, A., 2007. Digital video
technology and surgical training. In European Clinics
in Obstetrics and Gynaecology, 3 (1), pp. 31-34.
Botden, S.M.B.I., et al., 2007. Augmented versus Virtual
Reality Laparoscopic Simulation: What Is the
Difference? In World Journal of Surgery, 31 (4), pp.
764-772.
Sivrikaya, F., Yener, B., 2004. Time Synchronization in
Sensor Networks: A Survey. In IEEE Network. 18 (4),
pp. 45-50.
Ganeriwal, S., et al., 2003. Timing-sync protocol for
sensor networks. In Proceedings of the 1st
International conference on Embedded networked
sensor systems, pp. 138-149.
Maróti, M., et al., 2004. The flooding time
synchronization protocol. In Proceedings of the 2nd
international conference on Embedded networked
sensor systems, pp. 39-49.
Elson, J. et al., 2002. Fine-Grained Time Synchronization
using Reference Broadcasts. In Proc. 5th Symp. Op.
Sys. Design and Implementation, pp. 147–163.
Cox, D. et al., 2005. Time Synchronization for ZigBee
Networks. In Proceedings of the 37th Southeastern
Symposium on System Theory (SSST2005), pp. 135–
138.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
86
