
NOVEL HAPTIC TOOL AND INPUT DEVICE FOR BILATERAL
BIOMANIPULATION ADDRESSING ENDOSCOPIC SURGERY
K. Houston, O. Tonet, C. Eder, A. Menciassi, P. Dario
CRIM Laboratory, Scuola Superiore Sant’Anna, Pisa, Italy
A. Sieber
Profactor Research & Solutions GmbH, Austria
Keywords: Microhandling, sensorised, microgripper, teleoperation, haptic, force feedback.
Abstract: In this paper a teleoperation system is presented which consists of a sensorised polymer microgripper as a
suitable end effector on an endoscopic microinstrument which is controlled by a novel tweezer-like haptic
input device. This tweezer device gives the operator the ability to remotely feel these forces generated by
grasping operations with the microgripper. This feedback is used to control the amount of force applied in
manipulation of tissues during the procedure. The mechanical and electronic design of the microgripper,
microinstrument and haptic tweezers is also presented and preliminary results detailed.
1 INTRODUCTION
Thanks to technological advances, an increasing
number of precision operations are nowadays
possible through key hole surgery interventions.
However, during key hole surgery sensory feedback
information is reduced, distorted or even absent,
which is the case of visual, force and tactile
information, respectively. These sensorimotor
limitations also reduce dexterity in manipulation
tasks. In this context, microengineering and
microrobotics can help providing the surgeons with
a new generation of smart instruments. Research
efforts have been devoted to restoration of haptic
(force and tactile) feedback (Kazi, A. et al, 2001).
Forces exerted during surgery and the role of haptic
perception have been investigated in many papers
(Sheridan, T.B. et al, 1992, Kitagawa, M et al).. In
traditional key hole surgery procedures, the
attenuated haptic sensation still plays an important
role (Bholat, O. S. et al, 1999), but it cannot be
further restored or enhanced. In the case of
mechatronic or robotic instruments, however, the
interaction forces and torques between instrument
and tissue can be measured and fed back to the
surgeons hand by means of actuators and dedicated
interfaces. Recent surgical instruments (Rosen, J. et
al, 1999, Tavakoli, M. et al, 2005) and telerobotic
systems used for research (Cavusoglu, M. C. et al,
2001, Mayer, H. et al, 2005) incorporating haptic
interfaces have been developed (Menciassi, A. et al,
2001, Menciassi, A., 2003). The telesurgery concept
has been enhanced and brought to a commercial
stage, e.g. da Vinci Surgical System by Intuitive
Surgical, Inc. (Guthart, G. S. et al, 2000), which
however does not yet incorporate force feedback.
There are also several authors which have
produced working prototype manipulation system
with force feedback tools (Howe, R.D. et al, 2006,
Pillarisetti, A. et al, 2006, Mitsuishi, M. et al, 2005)
Howe, R.D. et al, 2006, Pillarisetti, A. et al, 2006,
Mitsuishi, M. et al, 2005). This paper aims to present
an entire teleoperation system which consists of an
endoscopic tool with a microgripper end-effector
and a novel haptic force sensing tweezers which can
together give a remote force sensing ability during
key hole surgery procedures, for example in
laparoscopy or endoscopy . All of these new tools
are connected to a user interface with micro-
controller communication to dynamically display
microscopic video, gripper force values and also
modes to change the haptic behaviour of the tools in
real-time.
64
Houston K., Tonet O., Eder C., Menciassi A., Dario P. and Sieber A. (2008).
NOVEL HAPTIC TOOL AND INPUT DEVICE FOR BILATERAL BIOMANIPULATION ADDRESSING ENDOSCOPIC SURGERY.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 64-69
DOI: 10.5220/0001047100640069
Copyright
c
SciTePress
2 METHODS
2.1 Microgripper
The sensorised microgripper used as end-effector for
the endoscopic microinstrument is an SMA (shape
memory alloy) wire actuated polymer type and has
been detailed in previous work (Houston, K. et al,
2007). The SMA actuation principle is based on a
simple SMA wire applying a tensile force through
the centre of the symmetrical microgripper structure,
thus causing the tips of the device to move inward
(Figure 1). The advantages of this microgripper are
that it is robust, has a large gripper tip span, is made
primarily of polymer, and is low cost, as it can be
mass-fabricated by SDM (shaped deposition
manufacturing. The first polyurethane microgripper
prototype measures 22 mm length in total, with a
width of 6 mm. Figure 2 showing a FEMLAB 3.0
structural strain displacement simulation to verify
the design.
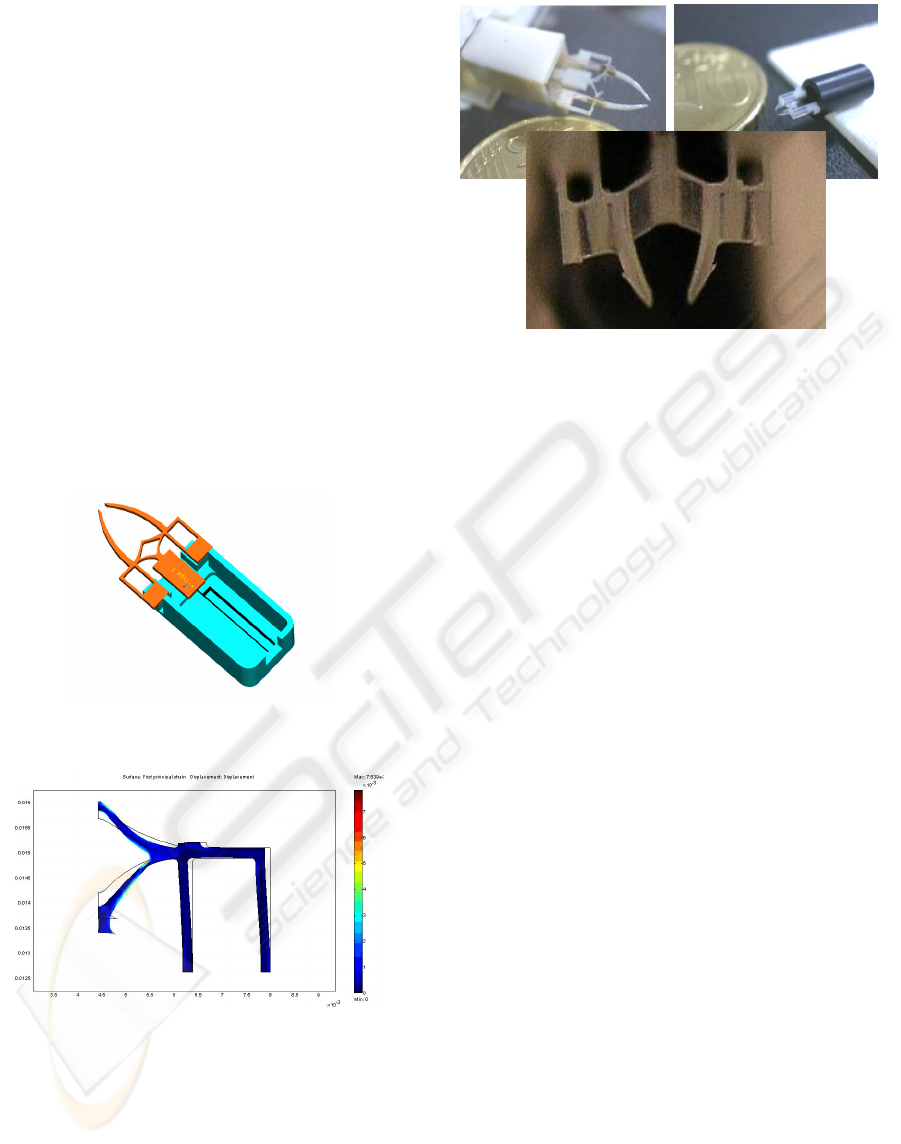
Figure1: SMA actuated microgripper.
Figure 2: FEMLAB strain due to SMA wire force.
As an added part of this work, a further miniaturised
SMA actuated microgripper shown in Figure 3
(right) was designed and fabricated using the same
techniques, Figure 3 (left) shows the first sensorised
prototype.
Figure 3: First gripper prototype (top left) and
miniaturized version (top right, bottom).
To name a few advantages of the smaller
microgripper, this device is less than half the total
length of the first prototype (11 mm), half the width
(3 mm), has a gripper tip maximum span of 500 μm
and requires a lower operating power. Figure 8
shows a design of the device attached to the
endoscopic tool. The microgripper itself is fabricated
by the SDM process which has been implemented
and detailed in many previous works with success
(Eisinberg, A. et al, 2005). The four micro strain
gauges are embedded in the microgripper at the
points of maximum structural strain. In one version,
all eight micro strain gauge wires and two SMA
power supply wires are embedded in the polymer
microgripper housing for robustness and a silicone
membrane covers the opening of the actuator
housing where the SMA wire connects with the
moving microgripper structure. This allows the
device to be used in fluid environments. Figure 4
shows another version where the moulded gripper
structure is mounted on a glass substrate with a
copper/polyamide flexible electrical connector. This
allows all 8 strain gauge connections to be
accessible inside the housing- in practical terms this
means that there are no fragile wires coming from
the microgripper, and makes the gripper assembly
more modular and robust. There is then also the
possibility of integrating electronics onto the
substrate.
NOVEL HAPTIC TOOL AND INPUT DEVICE FOR BILATERAL BIOMANIPULATION ADDRESSING
ENDOSCOPIC SURGERY
65
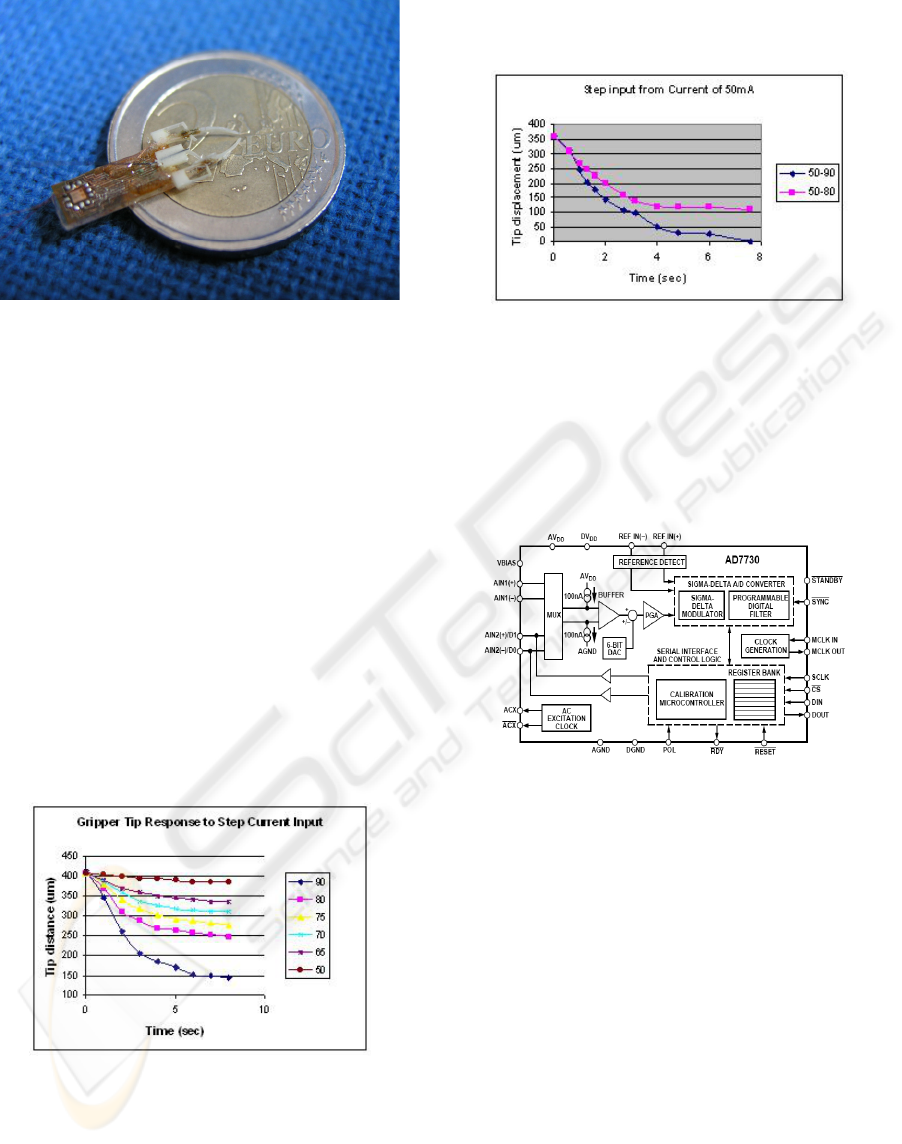
Figure 4: Modular design of the gripper structure on glass
substrate with flexible circuit.
The microgripper requires a current of 70 mA for
total tip closure. A step current input applied to the
SMA actuator demonstrates the dynamic behaviour
of the device (step response plotted for six current
steps from 40 to 90 mA) in Figure 5. The calculated
time constant is 8 seconds, while although quite high
is normal for SMA mechanisms. In order to decrease
the time constant and thus the speed of grasping, a
preheating control strategy was used which
maintained the SMA wire heated with a current of
40 mA; this was below the actuation current of the
wire. In order to actuate the gripper, the current was
then increased above 40 mA, and this makes the
actuator more responsive. Using this strategy, the
time constant was reduces to 2 s, a substantial
improvement in the dynamic response of the
microgripper. Figure 6 shows the improvement in tip
displacement of the microgripper against time.
Figure 5: Response of SMA microgripper to step current
input.
The signal of the strain gages in the microgripper is
sampled with an Analog Devices AD 7730 analog to
digital converter as shown in Figure 7. Offering a
programmable input stage (±80 mV to ± 10 mV) and
24 bit resolution this device is suitable for
bridge/transducer applications.
Figure 6: Improved response of SMA microgripper due to
preheating.
Further signal processing is then done by a separate
Atmel microcontroller (ATMEGA8) connected via
USB to PC. The software for the microcontroller is
programmed in C++, while the visualisation of the
data is performed under National Instruments
LabView.
Figure 7: AD7730 strain gauge signal processing circuit.
2.2 Endoscopic Device
The microgripper is mounted on the tip of the
endoscopic device (Figure 8), which can be bent in
two degrees of freedom up to ±90˚. Bending of the
tip is performed by pulling on steering wires. The
principle of the mechanism is described in detail in
(Harada, K. et al, 2005). For precise actuation of the
4 steering wires two high precision servo drives with
a theoretical resolution of 13 bit are used. The tube
is made of hard Delrin plastic, machined using
traditional turning techniques, while the rolling
spheres are of polyurethane, procured from off-the-
shelf stock. The smaller micro parts for passage of
wires and location of the spheres were machining
using a precision CNC milling machine. The all-
plastic assembly is finished with the controlling
wires which can be any type of strong wire-for the
prototype, a fishing line wire was used .
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
66
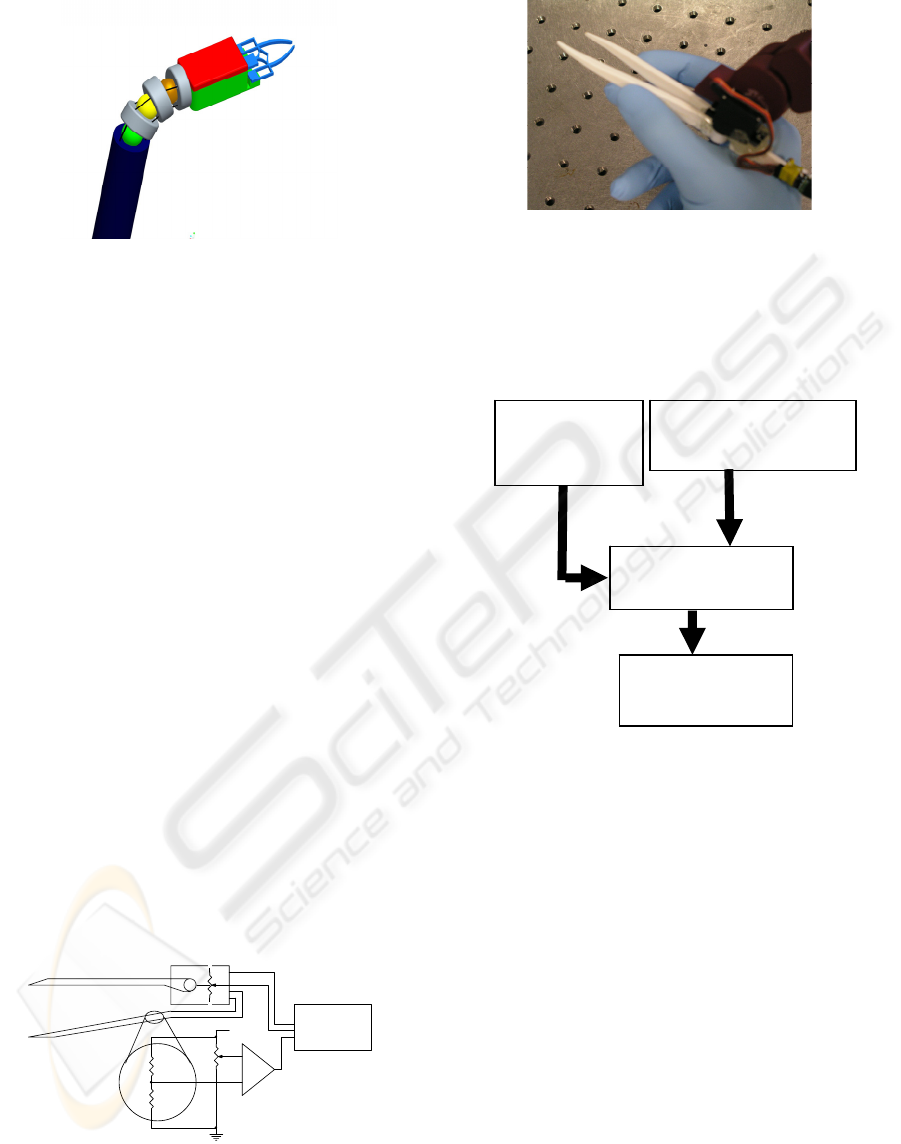
Figure 8: CAD drawing of the endoscopic instrument with
the gripper as end-effector.
2.3 Interfacing the Heptic Input Device
In the lower arm of the tweezers like input device
two strain gauges are integrated to allow a force
measurement, as shown in Figure 9. The signal of
these two strain gauges is processed in a half
Wheatstone bridge configuration and then amplified
by a factor of 100. To digitize the signal the first
channel AD0 of the Atmel ATMEGA8
microcontroller is used. Analogue channel 1 is used
to acquire the signal of the potentiometer integrated
in the Servo (Graupner 381) giving real feedback of
the position of the servo. One digital output is used
to drive the Servo with pulses in the length of 1 to
2 ms with a resolution of 0,5 µs. Figure 12 shows
the haptic tweezers being used in a
micromanipulation task with force feedback. Figure
10 shows the actual haptic tweezers prototype in the
users hand.
Figure 11 show the flow diagram for the haptic
tweezers in active mode. The AD7730 ADC is
continuously updating the microgripper tip force. As
this is happening, the ATMEL ADC is updating the
strain gauge voltage which relates to the actual
haptic tweezer force that the user perceives. The
microcontroller then compares the perceived and
actual forces and updates the new haptic tweezer
servo value to reflect the force changes, if any.
R10
10k
Servo
R11
10k
R12
10k
R13
10k
0
Atmel ATMEGA8
Dout0
Ain1
Ain 0
+5V
A
Figure 9: Haptic tweezers circuit.
Figure 10: Hepatic tweezers in users hand.
Thus in real life, when one grasps a pair of tweezers,
as the tips close, the force perceives on the finger
tips increases linearly. This is exactly how the haptic
tweezers behaves, in that when the user picks up the
tweezers, there is initially no movement.
Figure 11: Force feedback flow diagram.
When the user then applies a force with the finger
tips to close the tweezer tips, the strain gauge on the
device detects this force and activates the servo
motor-the position of the servo is always such as to
follow the finger tips of the user, while all the time
giving the sensation of a natural spring.
In the active mode (when there is an actual force
on the tips of the microgripper tool), the scheme in
Figure 11 is followed: the difference between the
force on the microgripper tips and the force
perceived by the user is used to update the haptic
tweezer servo value-this is done continuously.
Microgripper
force value (actual
force at microgripper
Haptic Tweezer strain
value (force that user perceives)
Update servo to
continue feedback force
Calculate new tweezer
servo value
NOVEL HAPTIC TOOL AND INPUT DEVICE FOR BILATERAL BIOMANIPULATION ADDRESSING
ENDOSCOPIC SURGERY
67

Figure 12: Haptic tweezers being used for
micromanipulation task with force feedback under
microscope.
2.4 Software
The current, and thus the actual position of the
microgripper, is set according to the actual position
of the control device. The feedback parameter is the
force sensed by the microgripper. This parameter
together with the position of the actuator and the
signal of the strain gauges integrated in the lower
arm of the device are used to drive the input devices
actuator (PID control). Figure 13 shows the software
flow scheme for the system.
Figure 13: Software scheme.
be used for surgical or biomanipulation task in a
haptic environment. At 3 mm in diameter, the tool is
suitable for keyhole surgery and can achieve ±90
degrees rotations around both axes.
The prototype sensorised microgripper has a tip
distance of 500-800 µm, and can be set to any
distance in the assembly process. The maximum tip
force is approximately 1 mN. The tip of the
sensorised microgripper is a flat edge of 100 µm,
however this geometry can be tailored in the design
of the mould according to the task. The tool length is
22 mm and is 6 mm wide.
Figure 14: Prototype haptic biomanipulation tool.
The smaller microgripper has a smaller tip distance
of 400 µm and again can be set during assembly.
The diameter is 3 mm, the tip has a right angled
point edge which is useful for precision grasping of
small particle without minimisation of adhesive
forces.
The prototype haptic tweezers has the
dimensions of a normal off-the-shelf pair of plastic
tweezers used in a medical lab (length of approx.
150 mm, width can be set by software, but as with a
normal pair of tweezers, a maximum tip distance of
approx. 40 mm is optimum). This prototype has a
working tweezer angle of 90 degrees, however only
about 20 degrees of movement is necessary to
simulate a pair of tweezers-a larger angle is not very
comfortable for the fingers when used for long
periods. Because the servo is a 13 bit model of high
resolution, the 20 degree angle sweep of opening
and closing the tweezers has a resolution of over 40
increments per degree, giving a very smooth
movement with no vibrations. The position of the
tweezer tips is updated at a frequency of 50 Hz. The
maximum torque of the input device is approx.
190 g/cm and the device is designed so that one arm
of the tweezers will snap off easily before the
maximum torque is reached.
3 CONCLUSIONS
Nowadays robot aided key hole surgery and
teleoperated surgical techniques lack devices able to
provide haptic feedback to the surgeon, particularly
in the small scale. This paper presented a new
teleoperation system with a novel endoscopic tool,
force sensing microgripper and haptic tweezers
which allows the surgeon to feel the gripping force
at the tip of a microgripper instrument, even if as in
the case of teleoperated surgery, they are miles
away.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
68

The authors are convinced that these first
promising results are one step closer to a new era of
surgical instruments giving "reality-like feelings" in
endoscopic and teleoperated surgery.
ACKNOWLEDGEMENTS
The work described in this paper was supported by
the ASSEMIC project, a Marie Curie Research &
Training Network (MRTN-CT- 2003-504826) and
PROFACTOR Research and Solutions GmbH –
Austria. A special mention to Mr. C. Filippeschi for
his continuous and invaluable help.
REFERENCES
Bholat, O. S. , Haluck, R. S., Murray, W. B., Gorman, P.
J. and Krummel, T. M., 1999, “Tactile feedback is
present during minimally invasive surgery”, J Am
Coll Surg,, 189(4):349–55.
Cavusoglu, M. C., Williams, W., Tendick, F. and Sastry,
S.S., 2001 “Robotics for telesurgery: second
generation Berkeley/UCSF laparoscopic telesurgical
workstation and looking towards the future
applications” In Proceedings of .the 39th Allerton
Conference of Communication, Control and
Computing.
Guthart, G. S. and Salisbury, J. K., 2000 “The Intuitive
TM
telesurgery system: overview and application”, in
Proceedings of ICRA 2000, pages 618–621, DaVinci.
Wagner,C.R., Perrin,D.P., Howe,R.D., “Force Feedback
in a Three-Dimensional Ultrasound-Guided Surgical
Task”, Symposium on Haptic Interfaces for Virtual
Environment and Teleoperator Systems 2006, March
25 - 26, Alexandria, Virginia, USA
Pillarisetti,A.,Pekarev,M., Brooks,A.D., Desai, J.P.,
“Evaluating the Role of Force Feedback for
Biomanipulation Tasks” Symposium on Haptic
Interfaces for Virtual Environment and Teleoperator
Systems 2006 March 25 - 26, Alexandria, Virginia,
USA
Pitakwatchara,P., Warisawa,S.,Mitsuishi, M., “Force
Feedback Augmentation Modes in the Laparoscopic
Minimal Invasive Telesurgical System” Aug. 2007,
IEEE /ASME Transactions on Mechatronics Volume:
12, Issue: 4, pages: 447-454
Kazi, A., 2001, “Operator performance in surgical
telemanipulation. Presence”, 10:495– 510.
Kitagawa, M., Okamura, A.M., Bethea, B.T., Gott, V.L.,
and Baumgartner, A.A., “Analysis of suture
manipulation forces for teleoperation with force
feedback”, /Lect. Not. Comp. Sci./, vol. 2488, pp.
155–162.
Mayer, H., N´agy, I., Knoll, A., Schirmbeck E. U., and
Bauernschmitt, R., 2005 “An experimental system for
robotic heart surgery” in IEEE 18th International
Symposium on Computer-Based Medical Systems
(CBMS), Dublin, Ireland.
Menciassi, A., Eisinberg, A., Carrozza, M.C. and Dario.
P., 2003, “Force sensing microinstrument for
measuring tissue properties and pulse in
microsurgery”, IEEE/ASME Transactions on
Mechatronics, 8(1):10–17.
Menciassi, A., Eisinberg, A., Scalari, G., Anticoli, C.,
Carrozza,M.C. and Dario, P., 2001 ,“Force feedback-
based microinstrument for measuring tissue properties
and pulse in microsurgery”, in Proc. IEEE
International Conference on Robotics and Automation
(ICRA).
Rosen, J., Hannaford, B., MacFarlane, M., and Sinanan,
M., 1999 “Force controlled and teleoperated
endoscopic grasper for minimally invasive surgery –
experimental performance evaluation”, IEEE
Transactions on Biomedical Engineering,
46(10):1212–1221.
Sheridan, T.B., 1992, “Telerobotics, automation and
human supervisory control”, MIT Press, Cambridge,
MA, USA.
Tavakoli, M., Patel, R.V. and Moallem, M. , 2005 ,
“Haptic interaction in robot-assisted endoscopic
surgery: a sensorized end-effector”, International
Journal of Medical Robotics and Computer Assisted
Surgery, 1(2):53–63.
Houston, K., Eder, C., Sieber, A., Menciassi, A. Carrozza,
M. C., Dario, P., 2007 “Polymer sensorised
microgrippers using SMA actuation”, ICRA 2007.
Eisinberg, A., Izzo, I., Menciassi, A. Houston, K. ,
Valdastri, P., Dario, P., Gustafsson., R., Simu, U.,
Johansson S., 2005 , “Design and shape deposition
manufacturing (SDM) fabrication of a PZT-actuated
tool for micromanipulation”, Computational
Intelligence in Robotics and Automation, CIRA 2005.
Harada, K., Tsubouchi, K., Fujie, M. G., Chiba, T., 2005,
“Micro Manipulators for Intrauterine Fetal Surgery in
an Open MRI”, Proceedings of the 2005 IEEE
International Conference on Robotics and Automation
Barcelona, Spain.
NOVEL HAPTIC TOOL AND INPUT DEVICE FOR BILATERAL BIOMANIPULATION ADDRESSING
ENDOSCOPIC SURGERY
69
