
Automatic Face Alignment by Maximizing
Similarity Score
Bas Boom, Luuk Spreeuwers and Raymond Veldhuis
University of Twente, EEMSC, Signals & Systems
P.O. box 217, 7500 AE, Enschede, The Netherlands
Abstract. Accurate face registration is of vital importance to the performance
of a face recognition algorithm. We propose a face registration method which
searches for the optimal alignment by maximizing the score of a face recogni-
tion algorithm. In this paper we investigate the practical usability of our face
registration method. Experiments show that our registration method achieves bet-
ter results in face verification than the landmark based registration method. We
even obtain face verification results which are similar to results obtained using
landmark based registration with manually located eyes, nose and mouth as land-
marks. The performance of the method is tested on the FRGCv1 database using
images taken under both controlled and uncontrolled conditions.
1 Introduction
Several papers have shown that correct registration is essential for good face recogni-
tion performance [1],[2]. The performance of popular face recognition algorithms, for
instance PCA, LDA and ICA, depend on accurate face registration. We propose a new
method for face registration which searches for the optimal face alignment by max-
imizing the score of a face recognition algorithm. Our new method outperforms the
landmarks methods described in [3]. In this paper we investigate the practical usability
of the new face registration method for face verification.
In practice, we need to locate the face region using a face detection algorithm. Using
this region, we register the face image to a user template in the database and then recog-
nize the face. Our face registration algorithm, first described in [4], finds an optimal face
alignment from the located face region. In this paper we investigate different practical
aspects of our face registration method. We test our face registration method with dif-
ferent face classifiers as evaluation criteria in the search procedure. We test our method
under circumstances where lighting is controlled and uncontrolled, and we also lower
the resolution of the face images. We investigate if our method works with automati-
cally registered training images, so it becomes fully automatic. Finally, we look at the
mistakes of our registration method and introduce some solutions to overcome these
problems.
In the literature, face registration is usually achieved by finding landmarks in a face im-
age. An approach which is similar to our face registration algorithm is described in [5]
and [6], which uses a form of robust correlation to find the alignment to a user template.
Recently, Wang et al [7] improve the face identification on the the FERET database by
Boom B., Spreeuwers L. and Veldhuis R. (2007).
Automatic Face Alignment by Maximizing Similarity Score.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 221-230
DOI: 10.5220/0002427602210230
Copyright
c
SciTePress

calculating the similarity score of different alignments and selecting the maximal score.
The main differences with their approach are the assumption of a face identification
problem and using the manually labelled eye coordinates as start points.
In section 2 we firstly explain our method. Secondly, we specify our search procedure
and finally we describe the face recognition algorithms. In section 3, we describe the
experimental setup we used to evaluate our method. Section 4 describes the various ex-
periments carried out using our registration method. The final section gives a conclusion
about this face registration method.
2 Matching Score based Face Registration
We have developed a new face registration method, namely Matching Score based Face
Registration (MSFR). This method searches for the optimal alignment between the
probe image and a user template in the database. To evaluate the alignment, we use
the output of a face classifier. This output is also called the matching score in the case
of a genuine user or the similarity score in the case of a unknown user. We assume that
the similarity score becomes higher if the alignment of face image to the template image
improves. The second assumption is that the optimal alignment of the genuine user’s
face image gives a higher similarity score than the optimal alignment of an imposter’s
face image.
2.1 Face Registration
Based on the assumptions described above, we have developed the following method.
The region of the face is found by a face detection algorithm, in our case the face
detector first described by Viola and Jones [8]. Using an affine transformation T
θ
on the
pixel p of the probe image I
p
, given by the region found by the face detection algorithm,
we vary the multiple registration parameters θ searching for the optimal alignment. The
geometric transformation function is :
T
θ
(x, y) = (θ
1
cosθ
2
x − θ
1
sinθ
2
y + θ
3
,
θ
1
cosθ
2
x + θ
1
sinθ
2
y + θ
4
) (1)
In the transformed image I
p
(T
θ
(p)), the pixel values are calculated using bilinear
interpolation. The optimal alignment parameters to person i in the database are given
by:
θ
max
= arg max
θ∈Θ
S(I
p
(T
θ
(p)), i) (2)
Of course, the similarity score S(I
p
(T
θ
max
(p)), i) can also be used to verify the
person’s identity. It is also possible to use one face recognition algorithm to find the
optimal alignment parameters but another face recognition algorithm to classify the
face.
222

2.2 Search for Maximum Alignment
To search for the maximum similarity score, we use a search algorithm called the down-
hill simplex method [9]. This search algorithm finds four parameters θ which maximize
the similarity score. The starting point of the search algorithm is the region given by the
face detection algorithm, where θ
0
= (1, 0
◦
, 0, 0). For the downhill simplex method,
we need to determine a simplex (geometrical figure in N dimensions consisting of N +1
points). This is created from the starting point parameters and four points for which we
varied a single parameter. The other four points of the simplex are: θ
1
= (1.2, 0
◦
, 0, 0),
θ
2
= (1, 5
◦
, 0, 0), θ
3
= (1, 0
◦
, 5, 0) and θ
4
= (1, 0
◦
, 0, 5). We have also experimented
with other simplexes to start the search algorithm. Details will be given later on in this
paper. We have also experimented with the search algorithm of Powell-Brent [10],[11],
but it performs worse for this search problem.
2.3 Face Recognition Algorithms
Face recognition involves performing several steps to be able to recognize a face in an
image. Using an aligned image I
p
(T
θ
(p)) given by the search algorithm, we select a
region of interest (ROI) and we normalize the image inside the ROI to zero mean, unit
variance. After that, the pixels in the ROI are vectorized and the resulting vectors are
then used in our face recognition algorithm.
We use four algorithms to calculate the similarity score, these algorithms are based on
PCA [12] some in combination with LDA [13]. In this paper, we used a fixed num-
ber of PCA and LDA dimensions, 100 and 50 respectively. The first algorithm is PCA
in combination with the Euclidean distance (eucl), where we calculate the Euclidean
distance between the probe image with the template in the database and use this as
similarity score. The second algorithm is PCA in combination with the Mahalanobis
distance (mah), where we use the Mahalanobis distance instead of the Euclidean dis-
tance. In the third algorithm, we perform feature reduction using PCA and LDA and use
the log-likelihood ratio proposed in [14] to calculate the similarity score. For a certain
class i, the similarity score S is calculated by:
S
y ,i
= −(y − µ
W,i
)
T
Σ
−1
W
(y − µ
W,i
)
+y
T
Σ
−1
T
y − log |Σ
W
| + log |Σ
T
| (3)
Where y is a vector which is a representation of the face image after feature reduc-
tion, Σ
T
is the total covariance matrix, Σ
W
is the within class covariance matrix and
µ
W,i
is the ith class average. The final algorithm uses the numerator of the likelihood
ratio, which is given by:
S
y ,i
= −(y − µ
W,i
)
T
Σ
−1
W
(y − µ
W,i
) − log |Σ
W
|
The reason behind using only the numerator is that we register to a certain user
template. This means that it is not necessary to maximize with respect to the background
distribution, given by the denominator in the likelihood ratio. We call this final method
223

the within ratio. This method is only intended for finding a maximal alignment to a user
template and not for face recognition. After the face registration, a final face verification
is always performed using the likelihood ratio.
3 Experimental Setup
In our experiments, we use the Face Recognition Grand Challenge (FRGC) version
1 database [15]. We only used face images in which the face was correctly found by
the face detection algorithm of Viola-Jones [8], because we are not interested in the
mistakes made during face detection. The face images are correctly found when the
eyes, nose and mouth coordinates lie inside the face region and the width and height
of this region are less then four times the distance between the eyes. The FRGC ver-
sion 1 database contains 275 individuals, from which we use a set of 3761 face images
taken under controlled conditions and a set of 1811 face images taken under uncon-
trolled conditions. In our experiments we randomly split these sets into two subsets,
each consisting of approximately half of the images of each person. One subset is used
for training and enrollment and the other is used for testing. The same random split is
used for all experiments.
We compare our face registration method with the best landmark based face registration
methods in [3], namely MLLL + BILBO. The results of the face registration are mea-
sured on the performance in face verification by calculating Equal Error Rate (EER):
this is the point of operation where the False Accept Rate (FAR) is equal to the False
Reject Rate (FRR). To measure the accuracy of registration we use the RMS error. We
calculated the location of the eyes, nose and mouth in the original image based on the
alignment found by MSFR. The RMS error is then calculated between these positions
and the manually labelled landmarks given by the FRGC database and we normalize to
a distance of 100 pixels between the eyes.
4 Experiments
Since our earlier paper [4], we have performed more extensive experiments. We have
done several experiments to gain a better understanding of our method. In our first
experiment we report the results of the different recognition algorithms on the FRGC
database. In the second experiment, we use a lower resolution making the algorithm
faster and applicable to video surveillance environments. The third experiment inves-
tigated if this face registration algorithm can be trained on face images which are reg-
istered using automatically obtained landmarks. The final experiments try to address
some failures of the search algorithm by performing the search several times and adding
registration noise to the training data.
4.1 Comparison between Recognition Algorithms
Searching for the best alignment requires a recognition algorithm. In this section, we
describe our experiments using the various recognition algorithms. We compare the re-
sults with both manually labelled landmarks and automatically obtained landmarks. For
224
our experiment, we use the experimental setup described in section 3. We use face im-
ages with a resolution of 128 × 128 pixels. Training the face classifier is achieved using
a training set which is aligned using the manually labelled landmarks. Face recognition
applied to images registered using MLLL + BILBO, however, is train also on images
which were registered using MLLL + BILBO [3]. After registering the face, we recog-
nize the registered faces using the Likelihood ratio classifier.
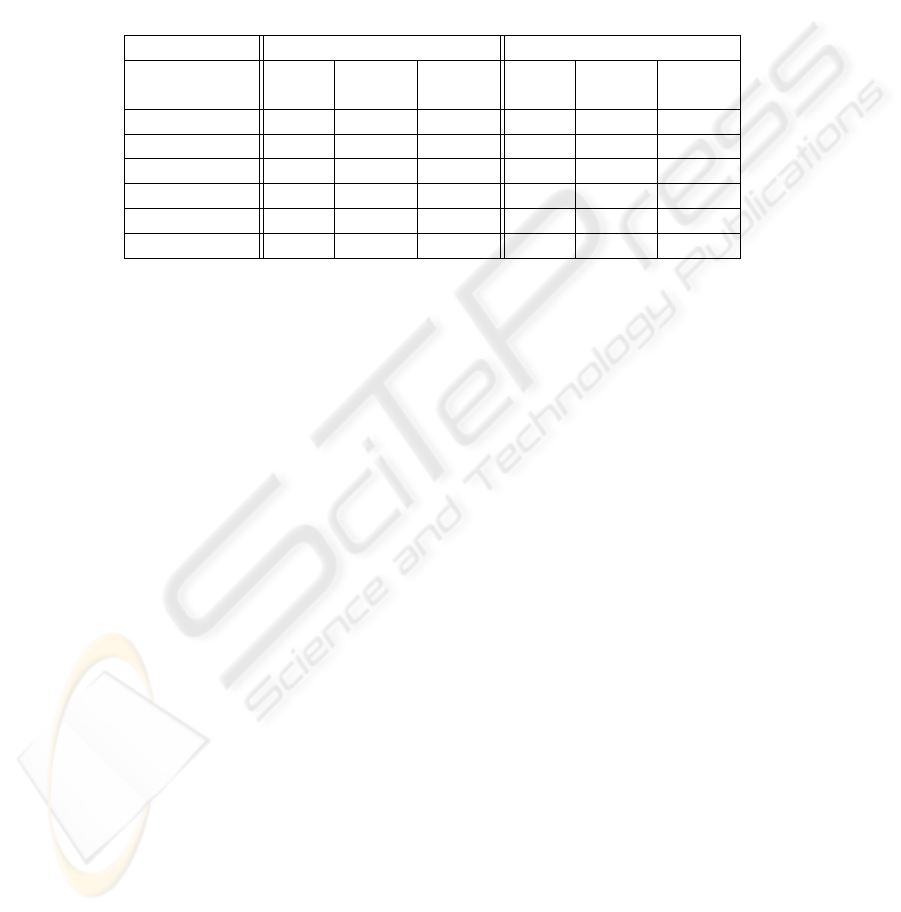
Table 1. Results of the face verification using various registration algorithms.
FRGC Controlled FRGC Uncontrolled
Registration EER [%] RMS error RMS error EER [%] RMS error RMS error
Method users impostors users impostors
Manually labelled 0.59 - - 1.7 - -
MLLL+BILBO 3.6 7.9 7.9 9.7 10.2 10.2
PCA eucl 1.8 3.4 9.5 3.2 4.3 10.3
PCA mah 1.3 3.0 5.7 1.5 2.9 4.2
Likelihood ratio 1.01 3.2 9.4 2.3 4.0 7.9
Within ratio 1.07 3.2 8.7 2.1 3.8 7.2
In Table 1, we compare the results of the various registrations in EER and RMS er-
ror. The columns for the EER show that the MSFR outperforms the landmark registra-
tion. By comparing the various classifiers of MSFR, it becomes clear that the likelihood
ratio and the within ratio perform best on the controlled images of FRGCv1, although
the performance of PCA with Mahalanobis distance is also very good. On the uncon-
trolled image of FRGCv1, PCA with Mahalanobis distance performs best, even better
than the manually labelled landmarks. In RMS error, the various MSFR methods are
more accurate than MLLL+BILBO when it comes to registration to the genuine user.
If we look at registration of an imposter, the RMS error of most of the MSFR is higher
than the RMS error of MLLL + BILBO. This does not need to have any effect on the
EER, because poorly registered images usually do not improve the similarity score. In
the case of PCA with Mahalanobis distance, the RMS error of the impostor is still lower
than that of MLLL+BILBO.
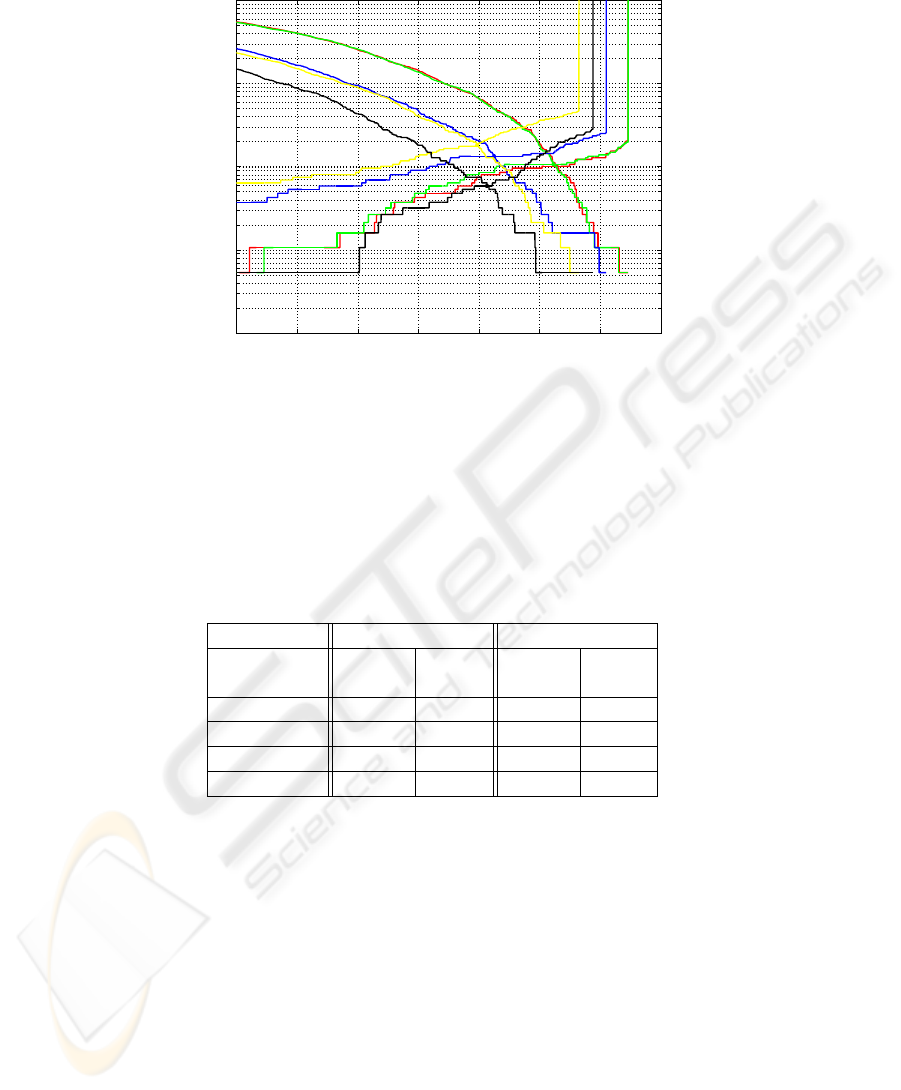
Figure 1 shows the FAR and FRR curves of the manually labelled landmarks and
the MSFR approaches on the controlled images of the FRGC. Both the matching and
non-matching scores increase when using MSFR, which means that for genuine users,
better alignments than manually labelled landmarks can be found using MSFR.
4.2 Lowering Resolution
In [4] we report that our method takes about 20-30 seconds to register and classify a
face image using an Intel Pentium 2.80 GHz. Currently, it takes about 5-10 seconds on
the same computer for a face image of 128 × 128 pixels, because we optimized some
of our source code. In [16] we investigated the effect of the image resolution on face
recognition. It turns out that the EER does not increase much on face recognition by
225
−400 −350 −300 −250 −200 −150 −100 −50
10
−4
10
−3
10
−2
10
−1
10
0
Matching score
Error rates
Fig.1. FAR and FRR curves: the red line is the likelihood ratio, the green line is within ratio, the
blue line is PCA mah, the yellow line is PCA eucl and the black line is the manual registration.
lowering the resolution to 32 × 32. In practice, we do not always have high resolutions
face images, so we performed a experiment at a resolution of 32 × 32 pixels, which
also leads to a decrease in computation time. The results of the recognition are stated in
Table 2 together with the results of using the normal resolution of 128 × 128 pixels.
Table 2. The EERs by using face images with a resolution of 32 × 32.
FRGC Controlled FRGC Uncontrolled
Registration resolution resolution resolution resolution
Methods 128 × 128 32 × 32 128 × 128 32 × 32
PCA eucl 1.8 2.4 3.2 5.5
PCA mah 1.3 2.3 1.4 2.8
Likelihood ratio 1.01 1.3 2.3 3.8
Within ratio 1.07 1.7 2.1 3.6
Although Table 2 shows that the EER increases somewhat by using face images of
32 × 32 pixels, these results are still acceptable and better than face registration using
MLLL + BILBO. It takes about 2-5 seconds to register and classify a face image of
32 × 32 pixels on a Intel Pentium 2.80 GHz. More improvements in the operation time
of our method can be realised, because we have not payed much attention to this subject
yet.
4.3 Training using Automatically Obtained Landmarks
Until now, we have assumed that for training and enrollment of the face registration
we can use a set of manually labelled face images. In practice, this usually is not the
226
case, especially for the enrollment of a new user. This is the reason we performed an
experiment where we trained and enrolled images which have been aligned using the
landmarks given by MLLL + BILBO. The results of this experiment are given in Table
3.
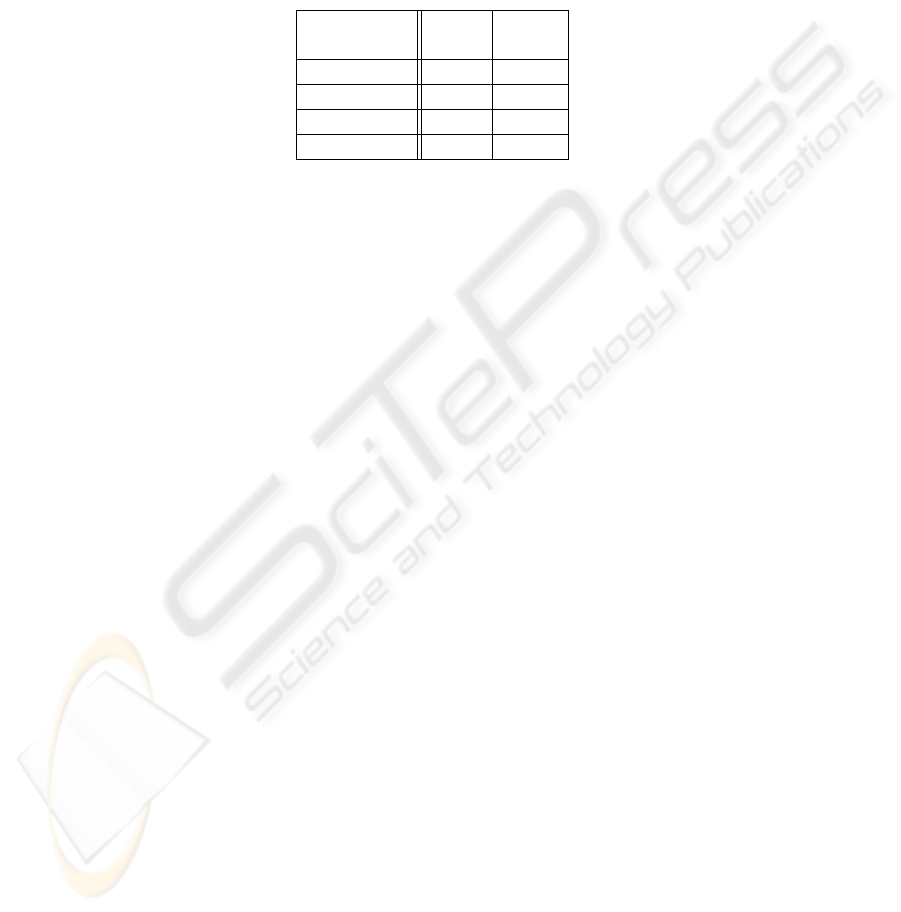
Table 3. The EERs when the training en enrollment are registered using MLLL + BILBO on
images from the controlled set of FRGCv1.
Registration EER [%] EER [%]
Methods manual automatic
PCA eucl 1.8 2.0
PCA mah 1.3 1.5
Likelihood ratio 1.01 1.7
Within ratio 1.07 1.8
Although the results we report in table 3 show increased error rates, the performance
is still much better than using MLLL + BILBO for face registration. This shows that
correct registration of training set is not critical.
4.4 Improving Maximization
In this paper we already reported a large improvement in the results of face registration.
But after some analysis of our method, we found that a correct registration is not al-
ways found by simply running the downhill simplex search algorithm. The main reason
is that the search algorithm can find a local maximum far away from the global maxi-
mum. In figure 2, we show the incorrectly found registration results by the likelihood
ratio classifier. These results can easily be determined by considering the RMS error of
face images. The faces depicted in figure 2 all have a RMS error bigger than 11 pixels,
except for the bottom right face image. The main reason for these errors is that in these
cases, the search algorithm searches in the wrong direction and gets stuck in a local
maximum.
To correct these outliers, we have developed two strategies to address this problem.
Firstly, we use the downhill simplex method several times but start with a different
simplex in the search space. Secondly, we change the search space by training on a
database with some registration noise.
Using a Different Start Simplex The first strategy is based on the idea that if we start
searching from another side in the search space, we will probably never come across the
same local maximum. For this experiment, we have defined two new start simplexes;
the first simplex consists of the points: θ
0
= (1, 0
◦
, 0, 0), θ
1
= (0.8, 0
◦
, 0, 0), θ
2
=
(1, −5
◦
, 0, 0), θ
3
= (1, 0
◦
, −5, 0) and θ
4
= (1, 0
◦
, 0, −5), so that we start from the
opposite side of the search space. For the second simplex, we start at the points: θ
0
=
(0.9, −2.5
◦
, −2.5, −2.5), θ
1
= (1.1, −2.5
◦
, −2.5, −2.5), θ
1
= (0.9, 2.5
◦
, −2.5, −2.5),
227
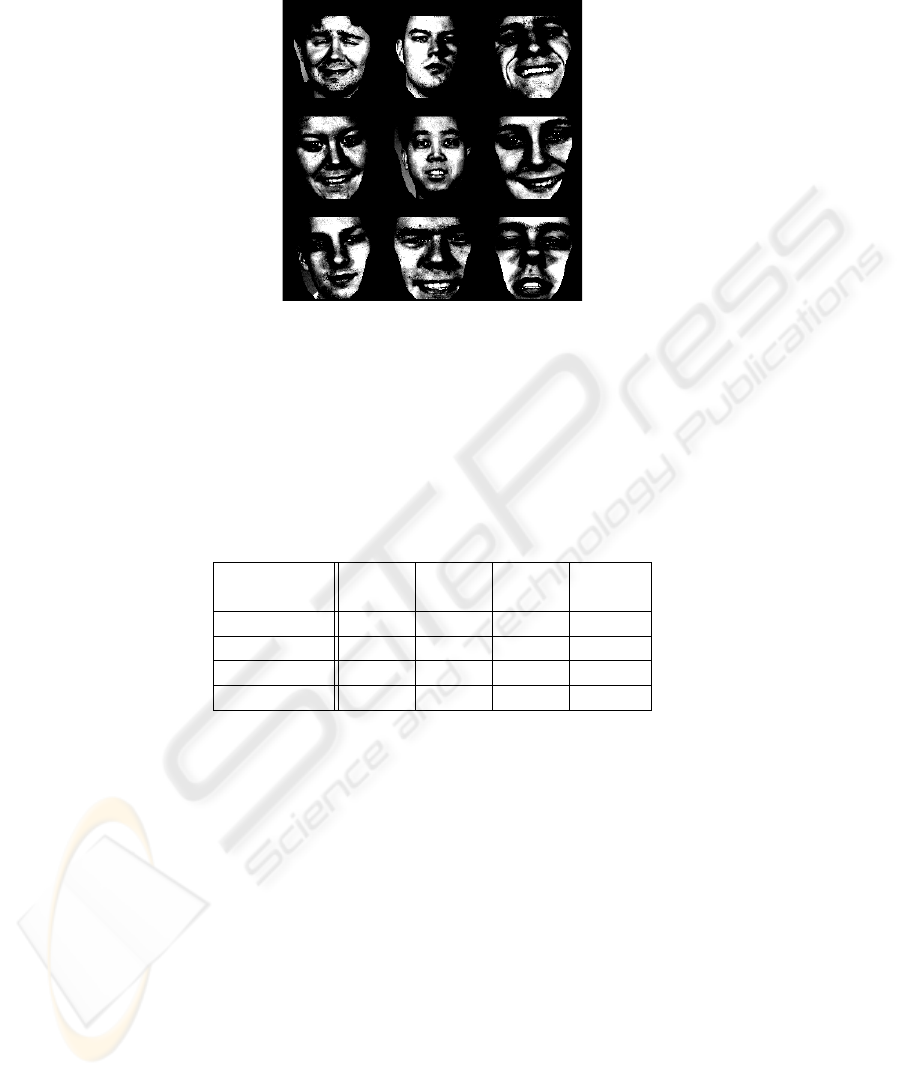
Fig.2. Face images which have been incorrectly registered, the bottom-right image is an example
of a correct alignment.
θ
2
= (0.9, 2.5
◦
, −2.5, −2.5), θ
3
= (0.9, −2.5
◦
, −2.5, 2.5) and θ
4
= (0.9, −2.5
◦
, −2.5, 2.5),
which gives us a search area around the located face region.
Table 4. The EERs when searching from different positions in the search space on images from
the controlled set of FRGCv1.
Registration start start start combining
Methods position 1 position 2 position 3 1,2,3
PCA eucl 1.8 7.4 3.5 3.6
PCA mah 1.3 1.6 5.2 0.64
Likelihood ratio 1.01 2.6 6.7 0.59
Within ratio 1.07 2.4 6.5 0.64
In Table 4 we present the results of the three different start positions. The EERs 2
and 3 in table 4 are the new start positions, while EER 1 gives the start position which
has been used throughout the entire paper. Also, the results of combining these out-
comes of registration by using the maximum similarity score of the three different start
positions is given in table 4, this procedure is done for both genuine users and impos-
tors. These combinations give results which are similar to registration using manually
labelled landmarks. The EERs of the other start positions are not particularly good, but
using other starting points results in different failures. By using the similarity score to
evaluate the final outcomes of the different starting points, the local maxima are dis-
carded.
Adding Noise to Train Our Registration Method The second strategy is based on
changing the search space. This is done by adding gaussian noise to the manually la-
228
belled landmarks of the training examples. By adding noise to the training, we also hope
that we can model the registration error better. The results of this experiment are given
in Table 5 where the t is the standard deviation of the noise in pixels, normalized to 100
pixels between the eyes.
Table 5. The EERs when adding noise to the registration of the training on controlled face image
of FRGCv1.
Registration noise combining
Methods t = 0, 1, 2
t 0 1 2 3 4 5
PCA eucl 1.8 1.5 1.5 1.8 1.3 1.5 1.9
PCA mah 1.3 0.91 0.85 0.80 0.69 1.2 0.80
Likelihood ratio 1.01 0.69 0.75 0.91 0.91 1.3 0.59
Within ratio 1.07 0.64 0.75 0.91 0.96 1.2 0.64
In Table 5 we show that by combining the results of adding registration noise to
the training set we reach the same result as with manually labelled landmarks. Another
observation is that by adding a little registration noise to the training, the EER seems
to decrease anyway. This is because a reduction in the number of outliers. We suspect
that the registration noise makes the search space smoother in the areas further away
from the optimal registration. By adding too much noise, the EER increases. This can
be observed for t = 5 in table 5.
5 Conclusion
In this paper, we present a system for face registration which uses the output of the
face recognition classifier to find an optimal registration. We search for an optimal reg-
istration by varying the face alignment parameters. Our new face registration method
performs better than the landmark based methods of [3]. The experiments show that our
method performs well with both face images taken under controlled as well as uncon-
trolled conditions. The operating speed of the method has been improved and we show
that lowering the resolution improves the speed even more while still obtaining good
performance. Our face registration method also works with an automatically registered
training set and achieves good results despite registration errors in the training set. This
makes our face registration method very useful in practise when dealing with a face
verification problem. By using multiple searches, the results of our face registration
method are equivalent to the results obtained with registration using manually labelled
landmarks. This kind of performance has not yet been achieved by any fully automatic
face registration method known to us.
229

References
1. Riopka, T., Boult, T.: The eyes have it. In: Proceedings of ACM SIGMM Multimedia
Biometrics Methods and Applications Workshop., Berkeley, CA (2003) 9–16
2. Beumer, G., Bazen, A., Veldhuis, R.: On the accuracy of EERs in face recognition and the
importance of reliable registration. In: SPS 2005, IEEE Benelux/DSP Valley (2005)
3. Beumer, G., Tao, Q., A.M.Bazen, Veldhuis, R.: A landmark paper in face recognition. 7th
International Conference on Automatic Face and Gesture Recognition (FGR06) (2006) 73–
78
4. Boom, B., Beumer, G., Spreeuwers, L., Veldhuis, R.: Matching score based face registration.
In: PRORISK 2006, STW (2006)
5. Jonsson, K., Matas, J., Kittler, J., Haberl, S.: Saliency-based robust correlation for real-time
face registration and verification. In: Proc British Machine Vision Conference BMVC98.
(1998) 44–53
6. Matas, J., Jonsson, K., Kittler, J.: Fast face localisation and verification. In: Image and Vision
Computing. Volume 17. (1999) 575–581
7. Wang, P., Tran, L.C., Ji, Q.: Improving face recognition by online image alignment. In: 18th
International Conference on Pattern Recognition (ICPR 2006). Volume 1. (2006) 311–314
8. Viola, P.A., Jones, M.J.: Rapid object detection using a boosted cascade of simple features.
In: CVPR (1). (2001) 511–518
9. Nelder, J., Mead, R.: A simplex method for function minimization. The Computer Journal 7
(1965) 308–313
10. Brent, R.: Algorithms for Minimization without Derivatives. Prentice-Hall, Englewood
Cliffs, N.J. (1973)
11. Powell, M.: An efficient method for finding the minimum of a function of several variables
without calculating derivatives. Computer Journal 7 (1964) 155–162
12. Turk, M., Pentland, A.: Eigenfaces for recognition. Journal of cognative neuroscience (1991)
71–86
13. Belhumeur, P.N., Hespanha, J., Kriegman, D.J.: Eigenfaces vs. fisherfaces: Recognition
using class specific linear projection. In: ECCV 2. (1996)
14. Veldhuis, R., Bazen, A., Booij, W., Hendrikse, A.: Hand-geometry recognition based on
contour parameters. In: Proceedings of SPIE Biometric Technology for Human Identification
II, Orlando, FL, USA (2005) 344–353
15. NIST: Frgc face db. (http://www.frvt.org/FRGC/)
16. Boom, B., Beumer, G., Spreeuwers, L., Veldhuis, R.: The effect of image resolution on the
performance of a face recognition system. In: ICARCV’06. (2006)
230
