
A NICHE BASED GENETIC ALGORITHM
FOR IMAGE REGISTRATION
Giuseppe Pascale and Luigi Troiano
RCOST - Faculty of Engineering, University of Sannio, Viale Traiano, Benevento, Italy
Keywords:
Image Registration, Genetic Algorithms.
Abstract:
Image registration aims to find the unknown set of transformations able to reduce two or more images to a
common reference frame. Image registration can be regarded as an optimization problem, where the goal is to
maximize a measure of image similarity. The measure of similarity on the overall image can be computation-
ally expensive, leading to measure the similarity of smaller subimages. However, the reduction of subimage
size results into a higher multi-modality for the optimizing function. Recent investigations have shown that
genetic algorithms can address this problem. However, the simple scheme of genetic algorithms can still fall
in local optima. In this paper, we explore the application of niche-oriented genetic algorithms, showing their
strengths in providing a more effective image registration algorithm.
1 INTRODUCTION
Image registration is the process of overlaying one or
more images to a reference image of the same scene
taken at different times, from different viewpoints,
and/or by different sensors. It geometrically aligns
two images, namely the reference and the input im-
age. Differences between images are introduced due
to the different imaging conditions, such as a different
sensor position. In this case, image registration en-
tails with considering geometric transformations able
to compensate the sensor misalignment (Figure 1).
The registration process mainly consists in deter-
mining the unknown transformation parameters re-
quired to map the input image to the reference im-
age. The task of determining the best spatial trans-
formation for the image registration can be character-
ized by four main components (Brown, 1992): (i) the
feature space, (ii) the search space, (iii) the similar-
ity measure, and (iv) the search strategy. The feature
space represents the image content used to compare
the input and the reference images. The search space
is made by allowed transformations. The similarity
measure provides a quality index of each solution.
The normalized cross-correlation function is one of
the most used similarity measure and can be written
as
CC =
N−1
∑
i=0
N−1
∑
j=0
((R
ij
− R) × (I
ij
− I))
v
u
u
t
N−1
∑
i=0
N−1
∑
j=0
(R
ij
− R)
2
×
N−1
∑
i=0
N−1
∑
j=0
(I
ij
− I)
2
(1)
where N is the number of pixels, R
ij
(I
ij
) is the pixel
of the reference (input) image at position i, j, and R
(I) is the pixel average value of the reference (input)
image. The time complexity of the normalized cross-
Figure 1: Image registration of satellite images considering
translations (tx,ty), rotation (r) and zoom (z).
342
Pascale G. and Troiano L. (2007).
A NICHE BASED GENETIC ALGORITHM FOR IMAGE REGISTRATION.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 342-347
DOI: 10.5220/0002382003420347
Copyright
c
SciTePress

correlation is O(N
2
). Although expensive, it is ranked
as one of most effective similarity measures. Because
it is computationally expensive, cross-correlation is
restricted to a subimage of input and reference im-
ages. The search strategy drives the exploration of
the search space. Which strategy to adopt depends on
characteristics of the similarity measure, the search
space and the feature space. Indeed, these three el-
ements determine the computational complexity and
shape the search space landscape.
Key issues in image registration techniques regard
accuracy and performances; in some applications reg-
istration accuracy is a key factor. For instance a study
presented by Townshend et al. (Townshend et al.,
1992) regarding the variation of land surfaces (mea-
sured using Normalized Difference Vegetation Index)
shows that a misregistration by only 1 pixel can intro-
duce error up to values higher than 50%.
This work focuses on image registration of two
satellite or airborne images, subject to small affine
transformations, using a niche based Genetic Algo-
rithms (GA). We consider the set of image pixels
as feature space and affine transformations as search
space. In order to evaluate the solution quality we
use a normalized cross-correlation similarity func-
tion. Genetic Algorithms help to explore the search
space efficiently and avoiding to be trapped in local
optima. The landscape multi-modality is emphasized
by the smaller sub-image size. This effect is depicted
by Figures 2 and 3. Although they only consider
translations, the landscape roughness becomes more
and more evident by reducing the image size. If we
consider these transformations jointly to others, such
as rotations and zooming, it appears evident that the
problem cannot be addressed effectively by linear op-
timizing techniques.
Several researchers applied GAs to image registra-
tion (Brown, 1992; Zitov
´
a and Flusser, 2003). Most
of them applied problem specific implementations of
genetic operators in Simple-GA. However, this algo-
rithm tends to converge to a single optimum, despite
of the landscape multi-modality. In order to cope with
this problem, niche oriented approaches have been
proposed in literature. Niche based GA represents
a more robust approach to search a multi-modal do-
main than traditional GA, since it provides a parallel
exploitation of search space portions. Moreover the
algorithm addresses the computational efficiency as it
is able to reach an optimal solution by fewer itera-
tions. Nevertheless, they have ever not been applied
to image registration. This paper aims to investigate
their application to this problem.
Section 2 describes the genetic algorithms consid-
ered by this paper, in particular the Simple-GA, and
translationY
translationX
CC
Figure 2: Landscape of cross-correlation function using a
128× 128 sub-image - Translation along X end Y axes are
the only considered.
translationY
translationX
CC
Figure 3: Landscape of cross-correlation function using a
32× 32 sub-image - Translation along X end Y axes are the
only considered.
two niche-oriented algorithms, i.e. Crowding-GA and
Sharing-GA. Section 3 presents some experimental
results. Conclusions and future work are outlined in
Section 4.
2 GENETIC ALGORITHMS
In this work we aim to compare niche oriented GA al-
gorithms to Simple-GA. In particular, two algorithms
are considered: (Deterministic) Crowding-GA and
Sharing-GA. Both are inspired by the niche exploita-
tion in nature, so that only similar individuals mate
and reproduce. Despite of the approach, the chromo-
some is always represented as a bit string. Each trans-
A NICHE BASED GENETIC ALGORITHM FOR IMAGE REGISTRATION
343
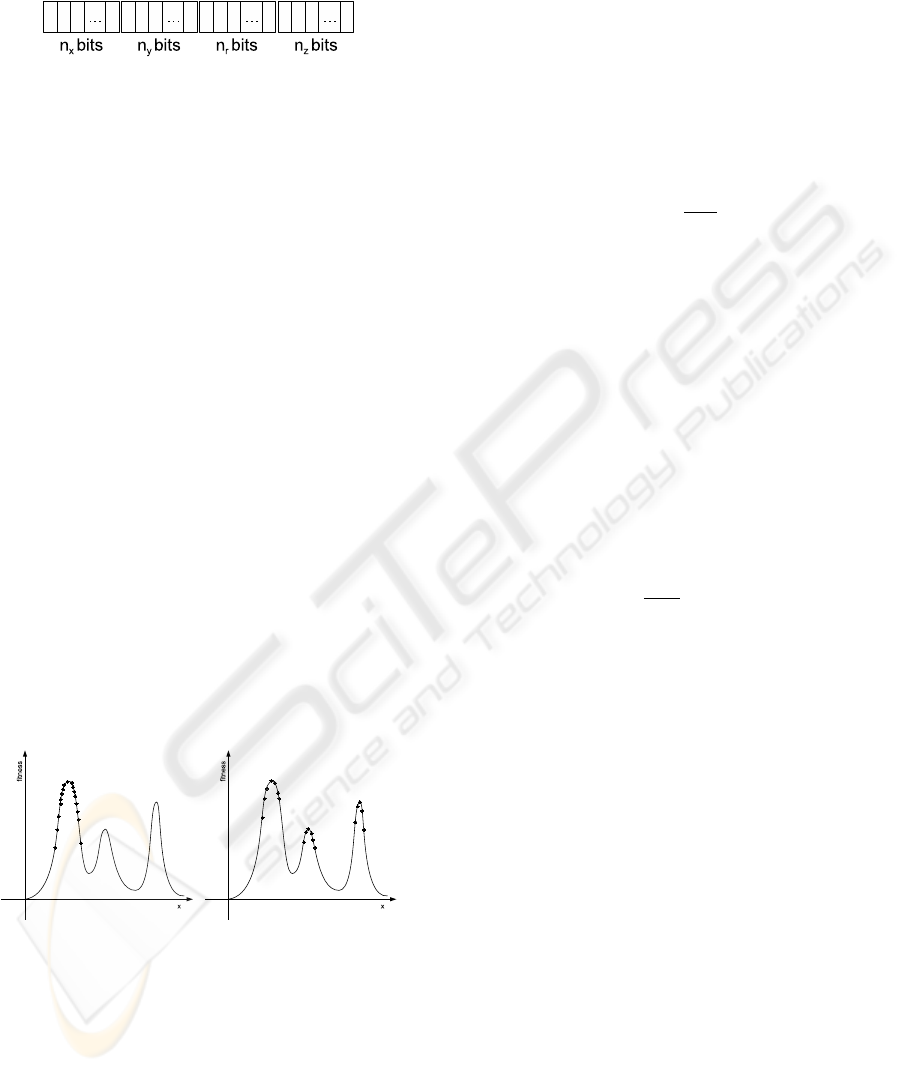
formation is coded by a fixed-length bit sub-string, as
depicted in Figure 4.
Figure 4: The chromosome structure.
The number of bits representing each transforma-
tion depends on the transformation range, given the
precision (0.01 in our experimentation). Therefore
each substring represents a fixed floating point real
number. The first bit is used for coding the sign,
whilst the remaining bits represent the magnitude of
the transformation parameter.
The Simple-GA (Goldberg, 1989) is able to ex-
plore effectively a multimodal search space. How-
ever it tends to find one single optimum, thus it can
still be trapped in local optima. This problem is the
result of genetic drift (De Jong, 1975), which is the
genetic algorithm’s tendency to select a population
with similar chromosomes, thus to converge towards
one solution. One strategy to overcome this problem
consists in maintaining population diversity, so that
different sub-populations are able to explore different
portions of the search space, in order to identify and
converge towards different multiple optima. Niche
based GAs represent an elegant and nature inspired
solution to address the issue of keeping the population
diversity. In a multimodal search space, each peak
can be thought of as a niche explored by a subpopula-
tion, similarly to nature where there are environments
(niches) that can support different types of life (Gold-
berg, 1989), as depicted in Figure 5.
Figure 5: The convergence of Simple-GA versus Niche-
GA.
In nature, a niche is able to support a certain num-
ber of individuals depending on the niche fertility and
the individual capacity of exploiting this fertility. If
there are too many individuals, the niche will not be
able to support all of them, and less competitive indi-
viduals are likely to die. Differently, if there are too
few individuals, they will start to reproduce quickly
in order to exploit the niche. Two of most success-
ful mechanisms are the fitness sharing (Goldberg and
Richardson, 1987) and deterministic crowding (Mah-
foud, 1995).
The idea behind the sharing method is to reduce
the fitness of individuals that are very similar in their
chromosome. By this way, individuals that uniquely
exploit portions of the search space are privileged for
reproduction, while discouraging redundant individ-
uals in the same area. The method is based on the
determination of the shared fitness of the individual i
as
f
′
(i) =
f(i)
m
i
(2)
where f(i) is the individual’s raw fitness, and m
i
is the
niche count, that is defined as
m
i
=
n
∑
j=1
sh(d(i, j)) (3)
The sharing function sh depends on the distance (dis-
similarity) d(i, j) between the individual i and the in-
dividual j. It is a monotonically decreasing function,
so that the niche count is reduced if individuals are
closer. In particular, it returns 1 if the elements are
identical, and 0 if they exceed some threshold of dis-
similarity. The function originally proposed by Gold-
berg (Goldberg and Richardson, 1987) is defined as
sh(d) =
(
1− (
d
σ
share
)
α
if d < σ
share
0 otherwise
(4)
where d is the distance, α is a constant used to regu-
late the shape of the sharing function, and σ
share
the
dissimilarity threshold. When α = 1, the function is
triangular.
The chromosome similarity can be measured by
different metrics, aimed to measure the genotype or
phenotype similarity. A genotype similarity metric
is domain independent, as it considers the distance
between string coding of chromosomes, such as the
Hamming distance. A phenotype similarity is related
to the chromosome structure in genes and to their se-
mantic, thus it is domain specific. The main drawback
of the sharing approach is in estimating proper val-
ues for the sharing function parameters, moreover the
complexity for the fitness evaluation becomes O(N
2
),
since a pairwise similarity measure is required at each
evaluation step.
The other mechanism for maintaining popula-
tion diversity is the determinist crowding (Mahfoud,
1992), that is an evolution of De Jong’s crowding
schema (De Jong, 1975). In De Jong’s schema, at
each generation only a portion of the population,
called population gap is selected for reproduction
ICEIS 2007 - International Conference on Enterprise Information Systems
344
(crossover and mutation). After reproduction, gen-
erated offsprings take the place of old individuals fol-
lowing this strategy: for each offspring a certain num-
ber of individuals are randomly selected from the pop-
ulation, and the most similar is the replaced by the
offspring. Similarity measures can be both genotypic
or phenotypic. The De Joung’s mechanism is thought
to reduce convergence of population to a single local
optimum. The drawback is that this algorithm slows
down the search space exploration.
In attempting to improve the De Jong’s schema,
Mahfoud suggests a new crowding schema called
Deterministic Crowding. In Mahfoud’s crowd-
ing schema, members are randomly chosen for
reproduction, then an offspring replaces a par-
ent only in case of higher fitness. To deter-
mine which of the possible parent-offspring pair-
ing ({parent1-offspring1, parent2-offspring2} OR
{parent1-offspring2, parent2-offspring1}) should be
used in comparing the parents to the offsprings, the
total of the parent-offspring similarities for each of the
two possible combinations is determined. The parent-
offspring pair that has the highest total similarity is
used to determine if the offspring should replace the
parent. This allows to keep population diversity and
to efficiently explore the search space, as different in-
dividuals do not influence each other. Mahfoud also
discourages the use of genotypic similarity, in favor
of phenotypic similarity measure, as domain-specific
knowledge is able to better measure the similarity be-
tween individuals. Both assumptions result into better
performances.
3 EXPERIMENTATION
Although, niche based GAs promise to overpass
Simple-GA limitations, the successful application of
them depends on the problem characteristics. In this
section we report a summary of an experimentation
aimed to verify if the niche approach provides effec-
tive advantages to image registration.
Experimentation has been conducted applying
Table 1: Algorithm configurations.
Parameter Simple-GA Crowding-GA Sharing-GA
population 100 100 100
p
crossover
1.0 1.0 1.0
p
mutation
0.05 0.05 0.05
Elitism yes yes yes
coding binary MS binary MS binary MS
σ - - 2.0
α - - 1
distance - Phenotipic Phenotipic
Simple-GA, Crowding-GA and Sharing-GA to a 20
high resolution images. These are satellite or airborne
images of European cities acquired by different sen-
sors (see Table 2 for more details). Algorithms end
after 100 generations. Algorithm configurations are
summarized in Table 1. For each image 50 runs have
been performed, obtaining 1000 data points for anal-
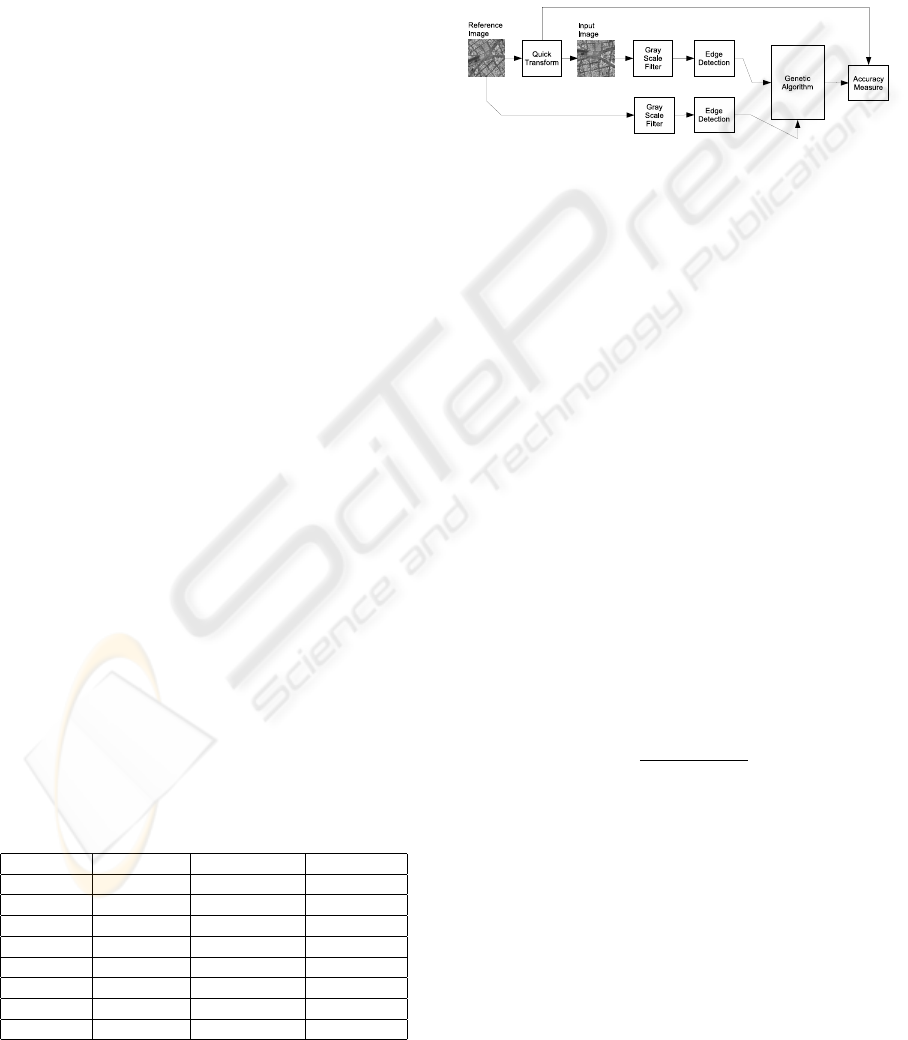
ysis. The data flow followed at each run is described
by Figure 6.
Figure 6: Experimentation steps.
The Quick Transform generates a misaligned in-
put image applying a random affine transformation
to the reference image (linear interpolation is used).
Transformation components are generated assuming
a normal gaussian distribution (µ = 0, σ = 2.551), in
order to simulate a realistic sensor misalignment. The
range of misalignments are rotation = ±5
◦
, and trans-
lation = ±5 px. As scaling is particularly annoying
for image registration algorithms, we focused our at-
tention on it. We considered different scaling ranges
from [0.9,1.1] to [0.6,1.5]. A gray scale filter converts
the reference and input images to gray scale, in order
to make the registration more robust. An edge detec-
tion filter (e.g. Sobel’s filter) is also applied. The two
images are passed to the registration algorithm. Fi-
nally the registration solution is compared to the orig-
inal misaligning transformation in order to measure
accuracy, computed as the Pearson’s correlation co-
efficient between the actual parameters a
act
and the
estimated parameters a
est
. This is akin to computing
the cosine of the angle between the parameters vec-
tors associated with the source and the target images.
ρ =
(a
act
· a
T
est
)
ka
act
k · ka
est
k
(5)
Correlation coefficient is in [−1, 1]. Close to one cor-
relation coefficients mean a small error between the
actual and the estimated parameters.
For practical purposes, a registration can be con-
sidered successfully executed, if the accuracy is over
a given threshold (0.8 in our experimentation.) The
percentage of tests providing an accuracy higher of
the threshold provides the algorithm success rate.
Figures 7 and 8 represent the success rate of the
three GA compared. The success rate analysis shows
A NICHE BASED GENETIC ALGORITHM FOR IMAGE REGISTRATION
345
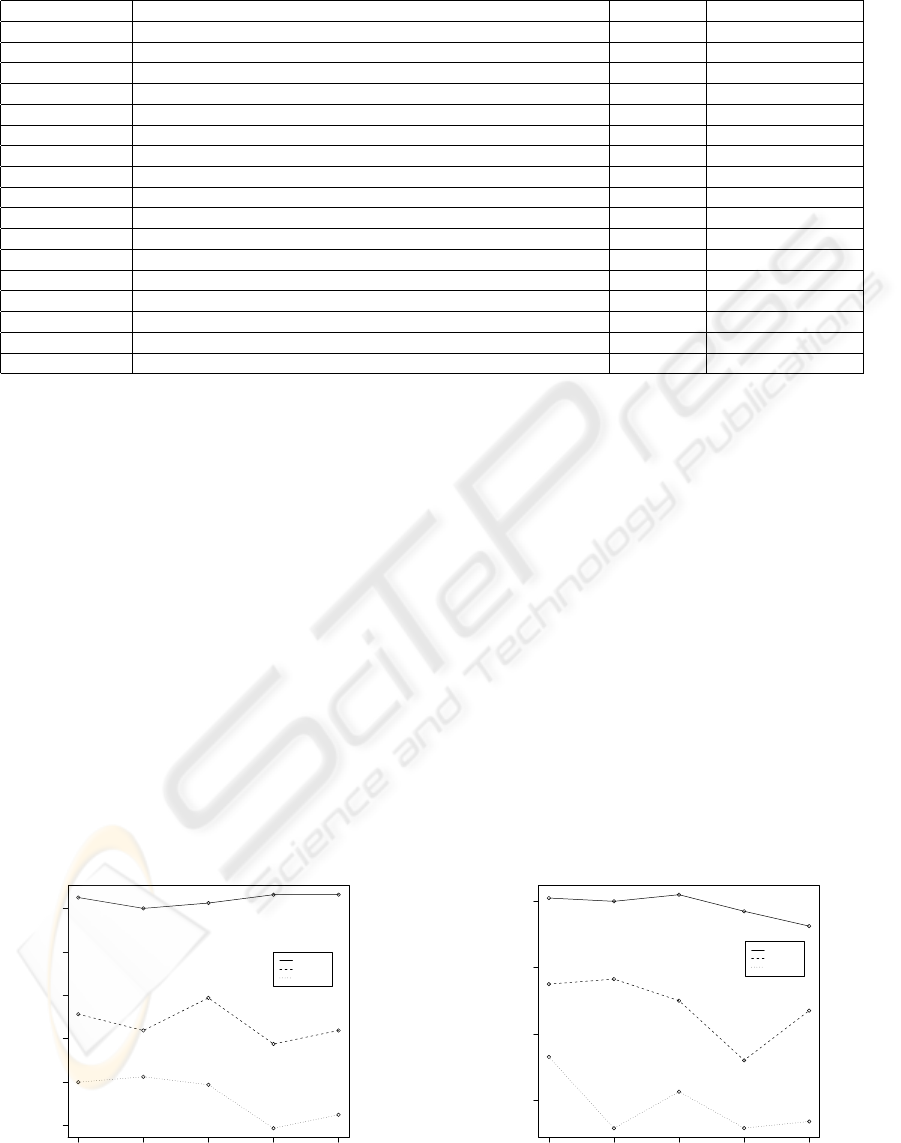
Table 2: Images characteristics.
Image Acquisition Dimension Entropy(normalized)
Rome 1 Landsat 7 data (ETM+ bands 3, 2, and 1) 512× 512 0.622
Rome 2 ASTER (Terra) 512× 509 0.563
Venice Ikonos 512× 607 0.595
Naples Shuttle, Hasselblad camera with a 250 mm lens. 512× 512 0.508
London ASTER (Terra) 512× 366 0.503
Berlin ASTER (Terra) 512× 458 0.550
London Space photograph, Kodak 760C with 800 mm lens. 512× 384 0.554
Madrid ASTER (Terra) 512× 471 0.622
Athens Astronaut photograph, Kodak K60C with 400 mm lens 512× 471 0.616
Athens olympics Ikonos 512× 776 0.597
Bilbao ASTER (Infrared image) 512× 512 0.580
Madrid Photo Satellite Quickbird, Digital globe 1123× 512 0.641
Paris Infrared image from ASTER (Terra) 512× 443 0.543
Copenhagen Photo Satellite Quickbird, Digital globe 512× 512 0.626
Hamburg Photo Satellite Quickbird, Digital globe 512× 509 0.581
Brussels Photo Satellite Quickbird, Digital globe 512× 458 0.538
Paris Photo Satellite Quickbird, Digital globe 512× 512 0.559
that Crowding-GA is more accurate than Simple-GA,
as the related success rate is always higher. The bet-
ter performances are due to the capacity of crowding
of exploiting different niches, without being trapped
in any local optimum. Simple-GA instead tends to
converge to a single local optima, despite of multi-
modality of the search space.
The experimentation results provide also evidence
that the Crowding-GA is more robust than the Simple-
GA approach. Indeed using 64 × 64 subimages, then
increasing landscape multimodality, the Crowding-
GA success rate is subject to small reductions (3-
4% lesser than 128 × 128 case), whilst Simple-GA
performances are significatively affected. Comparing
performances of algorithms with different subimage
sizes make this evident (Figure 9). Computationally,
the two algorithms are comparable.
The performance of Sharing-GA are intermediate
1.1 1.2 1.3 1.4 1.5
88 90 92 94 96 98
scaling()
success rate (%)
crowding
sharing
simple
Figure 7: Algorithms success rates using a 128× 128 sub-
image.
between Simple-GA and Crowding-GA. Similarly to
the Simple-GA, the Sharing-GA is less accurate and
robust than the Crowding-GA. However, it performs
slightly better than the Simple-GA. This is in accor-
dance with the benefits expected by a niche based
algorithm. Weaker performances can be imputed to
sensitivity of the algorithms to parameters. Select-
ing proper values for the Sharing-GA parameters is
not a trivial process. Therefore, the need of a precise
calibration can be be considered as weakness of the
algorithm itself.
The experimentation has been conducted making
assumptions that could not be met in real applications.
Indeed, input image can differ from the reference im-
age due to morphological (e.g growth of vegetation)
or radiometric (e.g. images taken at different hours of
a day) changes. Also partial occlusions (e.g. clouds)
can occur in real cases. Such differences can be mis-
1.1 1.2 1.3 1.4 1.5
80 85 90 95
scaling()
success rate (%)
crowding
sharing
simple
Figure 8: Algorithms success rates using a 64 × 64 sub-
image.
ICEIS 2007 - International Conference on Enterprise Information Systems
346
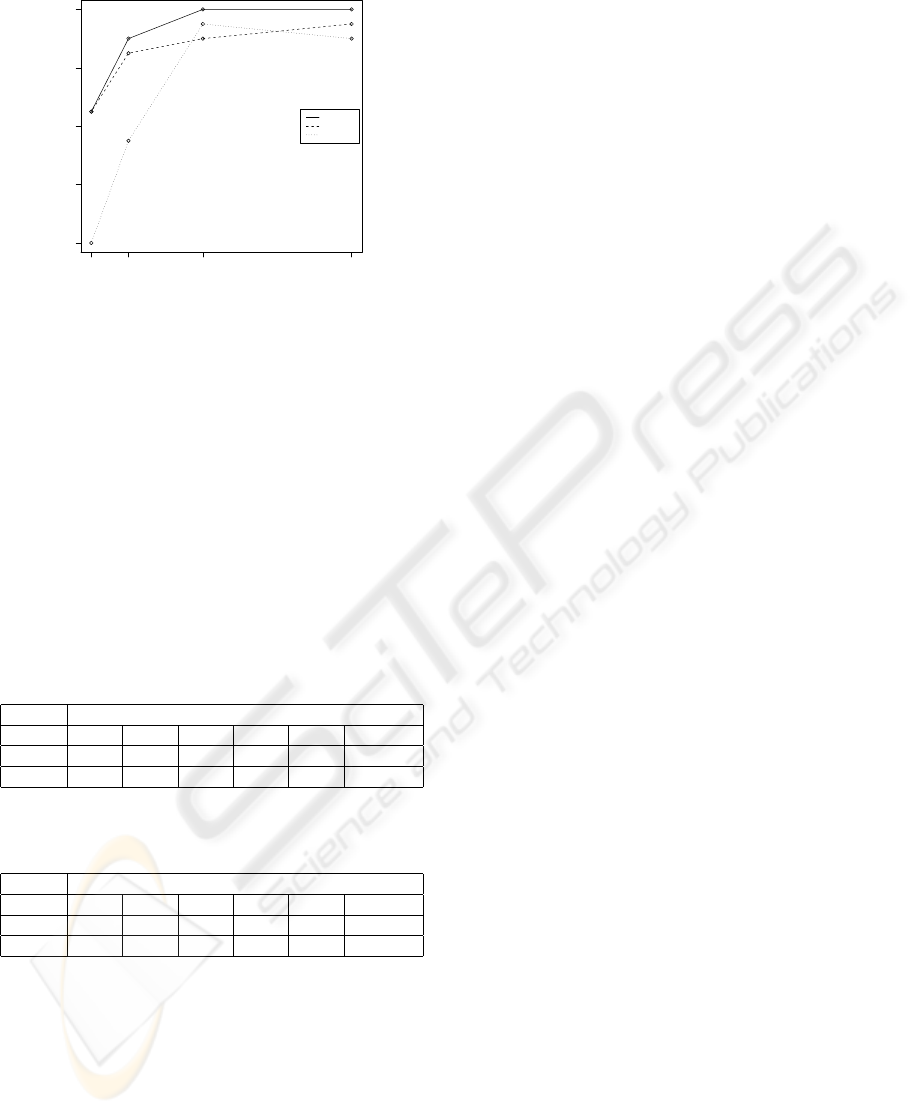
subimage size
success rate (%)
60 70 80 90 100
32 64 128 256
crowding
sharing
simple
Figure 9: Success rates of the three algorithms for different
sub-image sizes.
leading for a registration algorithm and should be con-
sidered in testing a registration algorithm. Another
approximation is that we do not take into considera-
tion perspective transformations. For satellite images,
however, this transformation can be ignored because
of the great distance. This effect is more relevant in
airborne images.
The better results obtained by Crowding-GA and
Sharing-GA are not due to the parameter configura-
tion. Indeed, in Table 3 and Table 4 we report perfor-
mances of Simple-GA with different parameter val-
ues.
Table 3: Success rate at different crossover rates.
Crossover probability (p
mutation
= 0.05)
Zoom 1.00 0.95 0.90 0.85 0.80 0.75
1.1 90.0 92.0 93.0 90.1 88.7 90.0
1.5 88.5 88.0 88.0 87.9 88.9 88.6
Table 4: Success rate at different mutation rates.
Mutation probability, (p
crossover
= 1.0)
Zoom 0.01 0.02 0.05 0.20 0.15 0.20
1.1 84.9 85.6 90.0 94.0 92.5 89.7
1.5 80.5 83.3 88.5 92.0 89.0 86.6
It results, that Sharing-GA and Crowding-GA out-
perform Simple-GA. Indeed success rate of Sharing-
GA is between 92.4 (zoom = 1.5) and 93.1
(zoom=1.1), whilst Crowding-GA success rate is 98.6
(zoom = 1.5) and 98.5 (zoom=1.1). In both cases the
result is better of Simple-GA performance. It worths
to notice that comparison is made with 128×128 sub-
image, thus entailing stronger landscape unimodality.
4 CONCLUSIONS AND FUTURE
WORKS
In this paper we investigated the application of niche
based genetic algorithms for image registration, as
an effective way to improve algorithm precision, in-
stead of adopting more complex genetic operators.
In particular, the paper described the use of two
niche based algorithms, namely the Sharing-GA and
the Crowding-GA. Experimentation has shown that
there is a real and consistent advantage in using the
Crowding-GA. The Sharing-GA, although confirm-
ing the advantages provided by a niche approach, re-
sulted in lower performances, due the higher algo-
rithm sensitivity to parameter calibration.
Future work aims to extend the experimentation
in order to include some of the image differences that
can be encountered in real applications (i.e. photo-
metric and morphologic differences, occlusions, etc.).
Moreover some improvements can be obtained by
properly selecting the realignment region, according
to the entropy and other image characteristics.
REFERENCES
Brown, L. G. (1992). A survey of image registration tech-
niques. ACM Computing Surveys, 24:325–376.
De Jong, K. A. (1975). An analysis of the behavior of a
class of genetic adaptive systems. PhD thesis.
Goldberg, D. E. (1989). Genetic Algorithms in Search, Op-
timization and Machine Learning. Addison Wesley.
Goldberg, D. E. and Richardson, J. (1987). Genetic algo-
rithms with sharing for multimodal function optimiza-
tion. In Proc. of the II Int. Conf. on Genetic Algo-
rithms on Genetic Algorithms and Their Application,
pages 41–49, Mahwah, NJ, USA. Lawrence Erlbaum
Associates, Inc.
Mahfoud, S. W. (1992). Crowding and preselection revis-
ited. Parallel Problem Solving from Nature, 2:27–37.
Mahfoud, S. W. (1995). Niching methods for genetic al-
gorithms. Technical Report 1894, Department of
Computer Science, University of Illinois at Urbana-
Champaign, Urbana, Illinois.
Townshend, J. R. G., Justice, C. O., Gurney, C., and Mc-
Manus, J. (1992). The impact of misregistration on
change detection. IEEE Transaction on Geoscience
and Remote Sensing, 30(5):1054–1060.
Zitov
´
a, B. and Flusser, J. (2003). Image registration
methods: a survey. Image Vision Computation,
21(11):977–1000.
A NICHE BASED GENETIC ALGORITHM FOR IMAGE REGISTRATION
347
