
ADAPTIVE WORKFLOWS FOR SMART DEVICES
A Concrete Approach Towards Device Failures
Seng Loke
Department of Computer Science and Computer Engineering, La Trobe University, Australia
Sea Ling, Maria Indrawan, Suryani Kurniati
Faculty of Information Technology, Monash University, Australia
Keywords:
Pervasive systems, smart devices, adaptive workflow, device failures.
Abstract:
Smart devices in an environment (e.g., home, factory, military settings, in-vehicle, office, etc) can be pro-
grammed and coordinated by a workflow in advance to achieve a user’s goal. No matter how advanced or
smart the devices are, devices can fail during workflow execution. In this paper, we describe an approach
to remedy such situations. We apply the existing concept of adaptive workflow management to a collection
of devices, called a device ecology. Information about the devices are kept in a device hierarchy so that a
suitable substitute device that can perform a similar task can be retrieved to replace a failed device in order to
ensure the workflow can continue execution. Similarity is defined based on a device hierarchy in an ontology
language. A prototype has been implemented as proof of concept.
1 INTRODUCTION
Technology developments in the past decade have re-
sulted in “less for more”, intelligent devices. Com-
puters are built small enough and smart enough to be
embedded into devices and human daily appliances,
creating intelligent devices. Smart device or intelli-
gent device is “any type of equipment, instrument,
or machine that has its own computing capability”
(SearchExchange.com, 2006).
There has been significant work in building the
networking and integrative infrastructure for such de-
vices, within the home, the office, and other en-
vironments and linking them to the global Inter-
net. For example, UPnP (UPnP Forum, 2000),
SIDRAH (Durand et al., 2003) and Jini (Sun Mi-
crosystems, 2001) provide infrastructure for devices
to be inter-connected, find each other, and utilize each
other’s capabilities. Embedded Web Servers (Ben-
tham, 2002) are able to expose the functionality of de-
vices as Web services. Approaches to modelling and
programming such devices for the home have been in-
vestigated, where devices have been modelled as soft-
ware components, collections of objects (Association
of Home Appliance Manufacturers, 2002), and Web
services (Matsuura et al., 2003).
Previous work (Loke, 2003; Loke et al., 2005)
provides a high-level device aggregation framework,
adopting service-oriented computing and business
process management in the form of device ecologies.
A device ecology is defined as an environment con-
sisting of collections of devices interacting synergis-
tically with one another, with users, and with Inter-
net resources, undergirded by appropriate software
and communication infrastructures that range from
Internet-scale to very short range wireless networks
(Loke, 2003). To program these devices, we make
individual web service calls to these devices which
are coordinated by a workflow in BPEL4WS. A cen-
tral coordinator called device ecology workflow (de-
coflow) engine exists as the ”brain” of the group of de-
vices in this environment. Therefore, device ecology
is characterised by the idea of service-oriented com-
puting and workflow in a high-level device aggrega-
tion framework, which perceives devices as orches-
trated web services taking part in a service-oriented
workflow. Such coordinated execution of devices and
Internet services (including appliances, and embed-
ded processors and computers) have widepsread uses
in the home, factories, military environments, office
environments, within cars, etc, wherever there is a
need for a collection of devices (hardware and soft-
191
Loke S., Ling S., Indrawan M. and Kurniati S. (2007).
ADAPTIVE WORKFLOWS FOR SMART DEVICES - A Concrete Approach Towards Device Failures.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - SAIC, pages 191-197
DOI: 10.5220/0002368901910197
Copyright
c
SciTePress

ware) and Internet resources to work together to fulfill
a common user programmed task (e.g., in response to
the task of cooking a recent dish talked about in a pop-
ular TV program such as the IronChef, suitable Web
services are consulted to download the recipe and the
fridge is consulted to determine if suitable ingredients
are available before the appropriate kitchen utensils
are prepared and instructions displayed on suitable
devices for the user to take action and to take the user
through the whole cooking process, including setting
up suitable timings and alarms on appliances, in a co-
ordinated workflow manner).
No matter how advanced or smart the devices are,
dynamic changes can occur during workflow execu-
tion. A device is prone to faults and failures. Several
realistic examples will be: accidental loss of electric-
ity, electrical spike or surge, thrown exceptions in task
failures, and loss of network connection. When one
of these changes occur, decoflow execution will be
affected. It will be halted or will totally fail, becom-
ing inexecutable. Although changes like these can be
resolved by manual effort, it is inefficient and cumber-
some. As quoted from (Aalst, 2001), no matter how
temporary or permanent changes are, workflow has to
be able to support it by typically executing a “more or
less idealised version of the preferred process”, as an
effort to achieve the original objective. In Workflow
Management Systems, such effort is captured in the
concept of the adaptive workflow.
Overall the aims of this project are two-fold:
1. applying existing concepts of adaptive workflow
management to a collection of devices in a device
ecology, in particular to remedy situations of de-
vice failure; and
2. providing a basis, for future research by investi-
gating how device failures could be handled.
In this paper, we will report on the resulting
concepts and algorithms for adaptive device ecology
workflows that can still execute effectively despite de-
vice failures occurring during execution. Section 2
contains an overview of device ecology and the im-
pact of task dependencies towards providing adequate
workflow flexibility. Section 3 explains the hierarchy
of devices used in our solution. This is followed by
a description of the remedy algorithm in section 4.
Section 5 describes our prototype implementation as
a proof of concept and section 6 is the conclusion.
2 WORKFLOW AND TASK
DEPENDENCIES
Workflows exist in areas from business management,
information system to computing in general. A work-
flow consists of an arrangement of activities and tasks
to achieve a business objective. It is a business pro-
cess comprising operational logics for the coordina-
tion of resources, independent units that have the ca-
pability to perform specific tasks (Piccinelli et al.,
2004). The term resources include entities that act
autonomously and upon request, depending on its co-
ordination. Resources can take the form of devices,
applications and, most significantly, web services.
In general, there are two types of workflow co-
ordination logic, orchestrated and choreographed. In
an orchestrated environment, a single local entity is
in charge of maintaining the state of the process, and
to request the resources to perform tasks (Piccinelli
et al., 2004). In a choreographed workflow, no cen-
tral entity organises order and request services. In-
teraction occurs between entities dynamically. It usu-
ally occurs in web service based workflows as in a
BPEL4WS specified workflow.
BPEL4WS (Microsoft et al., 2003) was devel-
oped to become the specification language to support
the implementation of business processes with web
services. It was designed to support business pro-
cess specific issues like, the potential execution order
of operations from a collection of web services, the
data shared between these web services, which part-
ners are involved, joint exception handling for collec-
tions of web services and issues involving how mul-
tiple services and organisations participate (Leymann
et al., 2002). These capabilities are reflected in the
BPEL4WS specification using XML-based tags like
<invoke>
,
<receive>
,
<reply>
, etc. BPEL4WS has
to adopt, comply and able to make use of Web service
specific standards like Universal Discovery Descrip-
tion and Integration (UDDI), Web Service Descrip-
tion Language (WSDL) and Simple Object Access
Protocol (SOAP).
Our work attempts to develop a framework to al-
low users to program devices in terms of workflow
using a suitable programming language undergirded
by a formal model. At the highest level, we have
developed Eco, an English-like interaction language,
consisting of a collection of abbreviated commands to
make end-user workflow programming simpler. This
is mapped down to the lower-language BPEL4WS
which is executed by the workflow engine that con-
trols the devices. Figure 1 depicts the conceptual ar-
chitecture of our framework.
Two decoflow scenarios in a smart home environ-
ICEIS 2007 - International Conference on Enterprise Information Systems
192
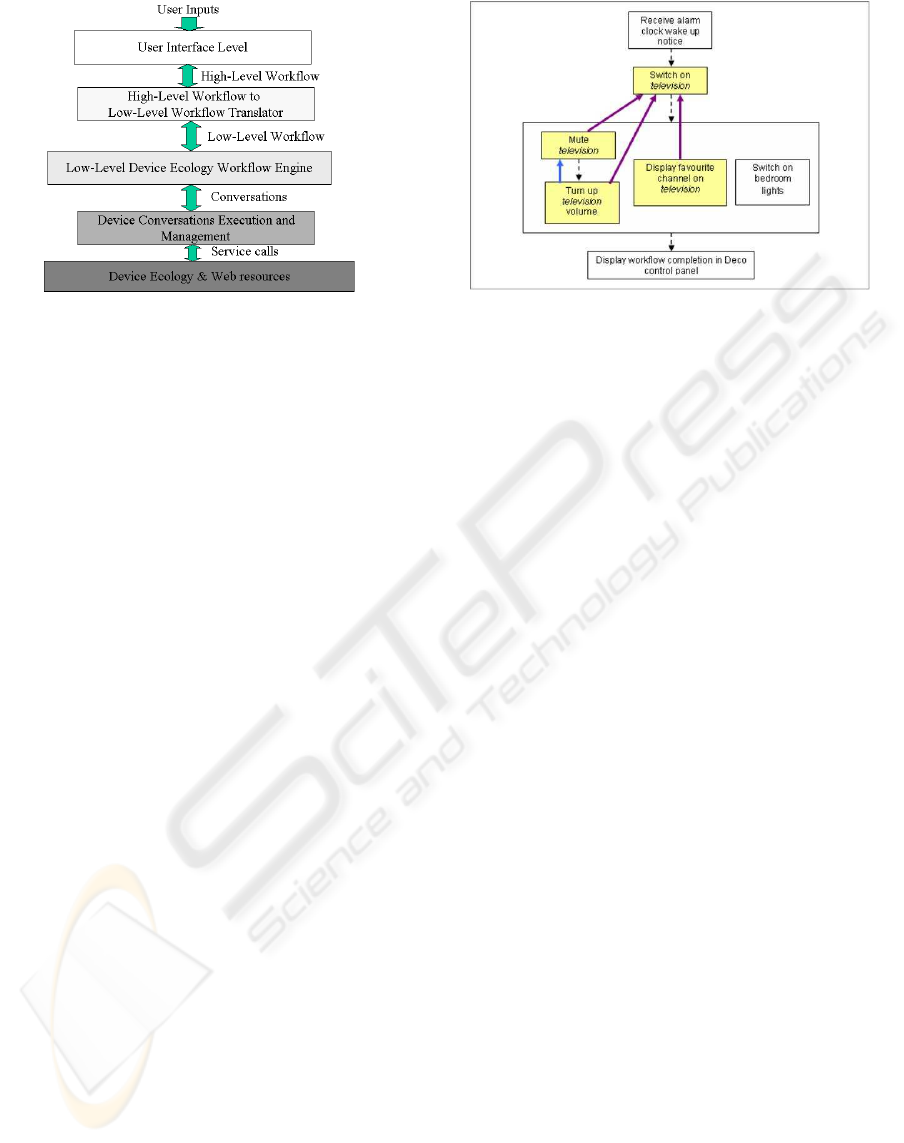
Figure 1: Multilayered Conceptual Architecture for Device
Ecology Workflow Engine.
ment are provided in Figure 2 and Figure 3. Following
the dashed arrows which depict the flow of workflow
execution and ignoring the dark arrows, we describe
the scenarios as follows:
Wake-Up Scenario: Decoflow execution starts upon
receiving a bed alarm clock notice, signifying the be-
ginning of the wake up decoflow. A sequence of ac-
tivities starts right after. The next activity initiated is
switching on television. After television has success-
fully changed its state, the following activities take
place concurrently: mute television; display favourite
channel on television and, switch on bedroom lights.
Following the muting of television, the volume is then
increased. Once the television is set, and two other
activities have successfully completed, a message of
decoflow completion is displayed in a control panel.
Morning Kitchen Scenario: This scenario takes
place in the kitchen area. It starts by receiving a user
response on the alarm clock (setting the alarm to the
off state). This is then followed by three concurrent
activities: activating coffee maker; activating kitchen
hall sensors and, retrieving ’to do’ list from the PDA.
After the kitchen hall sensors state turns to active,
kitchen lights are switched on. After retrieving ’to
do’ list on the PDA, the list is displayed on the refrig-
erator monitor, to remind user of his/her duties for the
day.
3 TASK DEPENDENCIES IN
DECOFLOW
The dependency between tasks has an impact towards
providing adequate workflow flexibility. Currently,
most task dependency studies focus on task primitives
and operations, particularly in the field of database
management. Generalised views of dependency mod-
Figure 2: Wake Up Scenario.
els has been reviewed to provide a background.
Kim (Kim, 2003) categorised workflow depen-
dency into three different models: procedure-driven
model; dependency-driven model and condition-
driven model, while in (Ray et al., 2004; Zhu et al.,
2005), task dependencies are classified based on task
primitives (task’s execution states: begin, abort, com-
mit), task operations and task input/outputs perspec-
tives, which resulted in three different types of de-
pendencies: control-flow dependencies, data-flow de-
pendencies and read-write dependency. Control-flow
dependencies and read-write dependencies focus on
task internal mechanism, particularly dependencies
from one task’s state to another in the same workflow.
Hence, these dependencies do not apply to task de-
pendencies for devices in our work. However, data-
flow dependencies is applicable.
A task T1 produces an output x that will be used as
the input to another task, say T2. Hence, the ability to
execute T2 depends on the success of executing T1.
If T1 and T2 are tasks performed by the same device,
their relationship is considered as same device task
dependency. The dark arrows in Figure 2 depict same
device task dependencies, e.g. turning up TV volume
depends on the successful execution of switching on
the TV first.
The dark arrow in Figure 3 shows a different de-
vice task dependency relationship. PDA and refriger-
ator monitor are two different devices but they share
the same data - the “to do” list.
To provide adaptiveness towards device failures in
the above scenarios, the decoflow engine which ex-
ecutes the workflow needs to be aware of the device
description, the types of failure and the available re-
covery techniques. Intuitively, when a task or a de-
vice is going to fail, a substitute or replacement needs
to be found. A listing of the device and its descrip-
tion is maintained through a device hierarchy. Figure
4 shows how devices are modelled as object-oriented
ADAPTIVE WORKFLOWS FOR SMART DEVICES - A Concrete Approach Towards Device Failures
193
Figure 4: Device Hierarchy.
Figure 3: Morning Kitchen Scenario.
abstract and concrete classes in such a hierarchy.
A device can also be seen as a collection of atomic
devices where appropriate. Although inspired by
UPnP MediaRenderer (Intel Research & Develop-
ment, 2003) which viewed device aggregation at low-
level framework, the hierarchy also represents a high-
level view of devices with the focus on tasks and sub-
tasks. For example, in the hierarchy, television con-
sists of the components: a monitor, a TV tuner and a
pair of speakers. The composite task
switch on TV
means switching on the three component devices, i.e.,
a composition of three subtasks (child tasks)
switch
on monitor
,
switch on TV tuner
and
switch on
speakers
. The composite task and its component
(atomic) tasks are shown in the task hierarchy in Fig-
ure 5.
Figure 5: Composite Tasks of a Composite Device.
4 REMEDYING
DEVICE-ORIENTED TASK
FAILURES
Previous works on task failures in workflows (Aalst
et al., 1999; Aalst and Jablonski, 2000; Ellis and Ked-
dara, 2000; Elder and Liebhart, 1996) have provided
ideas on how to resolve device-oriented task failures
in decoflow. While some works (Aalst et al., 1999;
Aalst and Jablonski, 2000; Ellis and Keddara, 2000)
generalise failures as process change including work-
flow changes as a result of handling modifications,
other works (Elder and Liebhart, 1996), upon de-
tecting a task failure, propose a recovery mechanism
which includes a combination of forward execution
and backward recovery. Forward execution is a deci-
ICEIS 2007 - International Conference on Enterprise Information Systems
194

sion to ignore failed task and proceed to the next task.
This can only be carried out if failed task has no vital
relationship (i.e., no dependencies) with other tasks,
especially for consistency measures (Elder and Lieb-
hart, 1996). Backward recovery involves effort to roll
back the whole workflow, undoing successful termi-
nated tasks, which in the end resulted in unsuccess-
ful execution of the workflow as a whole. Hence, we
adopt a combination of forward execution and back-
ward recovery. When a potential failure is detected,
this means to proceed to the following tasks where no
consistency measures need to be satisfied and undo
tasks that have vital relationships.
By applying the above mechanism to device ecol-
ogy, the steps for forward recovery by the decoflow
engine are:
1. To eliminate previous successfully terminated
tasks that utilises the same failed device;
2. To substitute the failed device with a working de-
vice, available for the job (not utilised by other
decoflow executing in the same time frame) and
capable of executing the task;
3. To make necessary changes towards the following
tasks that use the same device and other tasks that
has consistency measures (dependency) with the
changed and rolled back tasks.
4. If no substitute device found, skip the task and
move on.
We categorised device failures into two types: to-
tal device failure and partial device failure. Depend-
ing on the type of failed device, single device can only
result in total failure whilst composite device may re-
sult in either partial or total failure.
Total Device Failure. This type of failure exists when
all device components of a single device instance are
unable to carry out any function. For the case of
atomic device (with no components), it can only ex-
hibit this type of failure. Ultimately these are device
instances whose classes reside on the top level of the
concrete part of device hierarchy in Figure 4. They
include devices such as lights, sensor, printer, moni-
tor and speaker. In a composite device situation, total
device failure can only occur when all device compo-
nent instances refuse to function.
Partial Device Failure. Partial device failure occurs
when a device is able to execute only some of its
listed operations while the rest are not executable due
to some fault. An example will be failed television’s
tuner while television’s monitor and speakers are still
functioning. This type of failure can only affect com-
posite devices.
By considering the type of device failure, the num-
ber of tasks affected in decoflow, the dependencies
between them and the number of component devices
affected (if any), we have developed an algorithm to
recover from failures. Essentially, before executing
the algorithm, a device failure status needs to be deter-
mined. This is done by a
checkDeviceStatus
pro-
cedure, initiated just before the task is executed, (in
sequence), or before a series of tasks is executed con-
currently, (in flows).
The purpose of the algorithm is to look for a sub-
stitute device or a combination of devices for a failed
device in a failed task, if any. In summary, the algo-
rithm consists of the following steps:
1. Identify device failure type (total or partial).
2. Identify task failure (single or composite).
3. Get all available substitute device.
4. Obtain the best substitute devices. The criteria of
selection is based on the number of tasks its com-
ponent devices can cover.
5. Replace executable task, either single or compos-
ite.
6. Replace prior tasks that use the same failed de-
vice.
7. Replace following tasks that use the same failed
device.
5 DECOFLOW ENGINE
IMPLEMENTATION
In our previous work, we have developed an engine
which accepts a decoflow specification in BPEL4WS
and simulates the execution of the specification. An
execution manager reads the necessary tasks to form
a decoflow execution script, based on the task’s script
template whilst a graph manager forms the graphical
representation of the process elements derived from
the decoflow analysis by the engine.
We extend the decoflow engine to facilitate adap-
tiveness towards device failures. Hence, to implement
the algorithm described in the previous section, the
engine needs to incorporate the following functional-
ities: failure detection, task manipulation, decoflow
manipulation and device recording and tasks configu-
ration. The extension is shown in Figure 6. It accepts
Deco Hierarchy as an additional input to keep track
of devices that exist in the ecology as well as the va-
riety of tasks that the devices can perform. It consists
of the device hierarchy and the task hierarchy, men-
tioned previously.
The engine itself consists of:
ADAPTIVE WORKFLOWS FOR SMART DEVICES - A Concrete Approach Towards Device Failures
195
Figure 7: Deco Hierarchy Snapshot.
Figure 6: Decoflow Engine.
• Execution Manager. The manager checks tasks
for their abilities to execute. If a device is not ca-
pable of carrying out the designated task, the re-
covery algorithm is called.
• Task Manager. This entity deals with failure
firsthand. Once a task is detected as incapable
of execution, the task needs to be manipulated
in accordance with the best possible resolution
suggested by recovery algorithm. Specifically,
the task manager alters the decoflow executable
script, not the original decoflow specification in
BPEL4WS (Loke et al., 2005).
• Device Manager. Its main function is to find
a substitute device, using the device hierarchy
through the device hierarchy manager. The de-
vice manager queries and searches the device hi-
erarchy, for failed device substitutes. Similar to
the task manager, the device manager is designed
to support proposed failure recovery.
• Device Hierarchy Manager. This serves as the
interface between the device hierarchy and the de-
coflow engine. Its main function is to query the hi-
erarchy. It relies heavily on the structural design
of the device hierarchy in carrying out its activi-
ties.
As proof of concept, a prototype for the engine
was developed in Java with the deco hierarchy de-
fined by the Web Ontology Language OWL. Access
to the hierarchy from the engine is provided by Jena
(Seaborne, 2004) utilising RDQL (RDF Data Query
Language) for the query statements. A snapshot of
the deco hierarchy using Prot
´
eg
´
e and OWL Viz plug-
in is shown in Figure 7. The prototype has been tested
using various workflow scenarios on device failures.
6 CONCLUSION
Pervasive systems have seen intelligent devices com-
municating and interacting with one another. Our
work attempts to develop a framework to program
these devices in terms of workflow which is called a
device ecology workflow. Problems set in when one
ICEIS 2007 - International Conference on Enterprise Information Systems
196

or more devices fail. We have described an approach
by which we can remedy such situations by searching
for substitute devices before the workflow is being ex-
ecuted.
While other work exists in modelling, develop-
ing and configuring smart home systems (Norbisrath
et al., 2006), our work focuses on the workflow execu-
tion and control of these devices and providing a con-
crete solution to remedy device failures by adopting
existing concepts in the literature on adaptive work-
flows.
REFERENCES
Aalst, W. (2001). Exterminating the dynamic change bug:
A concrete approach to support workflow change.
3(3):297–317.
Aalst, W., Basten, T., Verbeek, H., Verkoulen, P., and
Voorhoeve, M. (1999). Adaptive workflow: On the
interplay between flexibility and support. In Proc. 1st
Int’l conference on Enterprise Information Systems,
Vol 2, pages 353–60.
Aalst, W. and Jablonski, S. (2000). Dealing with workflow
change: Identification of issues and solutions. Int’l
Journal of Computer Systems Science and Engineer-
ing, 15(5):267–76.
Association of Home Appliance Manufacturers (2002).
Connected Home Appliances Object Modelling, CHA-
1-2002. Available at http://www.aham.org/.
Bentham, J. (2002). TCP/IP Lean: Web Servers for Embed-
ded Systems (2nd Edition). CMP Books.
Durand, Y., Vincent, S., Marchand, C., Ottogalli, F., Olive,
V., Martin, S., Dumant, B., and Chambon, S. (2003).
SIDRAH: A Software Infrastructure for a Resilient
Community of Wireless Devices. In Proceedings of
the Smart Objects Conference (SOC’03), Grenoble.
Elder, J. and Liebhart, W. (1996). Workflow recovery. In
Proc. 1st IFCIS Int’l Conference on Cooperative In-
formation Systems, pages 124–34.
Ellis, C. A. and Keddara, K. (2000). A workflow change is a
workflow. In Business Process Management: Models,
Techniques and Empirical Studies, pages 201–17.
Intel Research & Development (2003). Designing a
UPnP AV MediaRenderer. Available at http://cache-
www.intel.com/cd/00/00/21/87/218761
218761.pdf,
accessed on 30 Nov 2006.
Kim, K. (2003). Workflow dependency analysis and its
implications on distributed workflow systems. In
Proceedings of the 17th Intenational Conference on
Advanced Information Networking and Applications
(AINA’03).
Leymann, F., , and Roller, D. (2002). Business Processes in
a Web Services World, IBM developerWorks.
Loke, S. (2003). Service-Oriented Device Ecology Work-
flows. In Orlowska, M., Weerawarana, S., Papa-
zoglou, M., and Yang, J., editors, Proceedings of the
International Conference on Service-Oriented Com-
puting, Lecture Notes in Computer Science 2910,
pages 559–574, Trento, Italy. Springer-Verlag.
Loke, S., Ling, S., Butler, G., and Gillick, B. (2005). Levels
of abstraction in programming device ecology work-
flows. In Proceedings 7th International Conference
on Enterprise Information Sytems (ICEIS2005), pages
137–44, Miami, USA.
Matsuura, K., Haraa, T., Watanabe, A., and Nakajima, T.
(2003). A New Architecture for Home Computing. In
Proceedings of the IEEE Workshop on Software Tech-
nologies for Future Embedded Systems (WSTFES03),
pages 71–74.
Microsoft, IBM, Siebel, BEA, and SAP (2003). Business
Process Execution Language for Web Services Version
1.1. Available at http://www-106.ibm.com/
developerworks/library/ws-bpel/.
Norbisrath, U., Armac, I., Retkowitz, D., and Salumaa, P.
(2006). Modeling eHome systems. In Proc. 4th Int’l
Workshop on Middleware for Pervasive and Ad-Hoc
Computing (MPAC 2006).
Piccinelli, G., Finkelstein, A., and Williams, S. (2004).
Service-oriented workflow: The dysco framework.
In Proceedings of the 29th EUROMICRO conference
(New Waves in System Architecture), pages 291–7.
Ray, I., Xin, T., and Zhu, Y. (2004). Ensuring task depen-
dencies during workflow recovery. In Proc. 15th Int’l
Conference on Database and Expert Systems (DEXA
2004), pages 24–33.
Seaborne, A. (2004). Jena tutorial: A program-
mer’s introduction to rdql. Available at
http://jena.sourceforge.net/tutorial/RDQL/, accessed
on 14th November 2006.
SearchExchange.com (2006). Definition of in-
telligent devices. Available at Whatis.com -
http://whatis.techtarget.com/definition/
0,,sid9
gci812508,00.html,accessed on 10 Oct 2006.
Sun Microsystems (2001). Jini Network Technology. Avail-
able at http://wwws.sun.com/software/jini/.
UPnP Forum (2000). UPnP Device Architecture. Available
at http://www.upnp.org/.
Zhu, Y., Xin, T., and Ray, I. (2005). Recovering from mali-
cious attacks in workflow systems. In Proc. 16th Int’l
Conference on Database and Expert Systems (DEXA
2005).
ADAPTIVE WORKFLOWS FOR SMART DEVICES - A Concrete Approach Towards Device Failures
197
